Координатно-вимірювальна машина
Номер патенту: 22585
Опубліковано: 17.03.1998
Автори: Гонта Ольга Петрівна, Телегіна Олександра Львівна, Воробьйов Петро Іванович
Формула / Реферат
1. Координатно-измерительная машина, содержащая основание, корпус с опорами для вращения плеча с опорой предплечья и балансировочным грузом, предплечья с балансировочным грузом, измерительную головку, отличающаяся тем, что она содержит, в качестве одной из координат, закрепленный на основании с возможностью программного перемещения в вертикальном направлении стол с измеряемыми деталями, дополнительный груз с измерительной головкой, закрепленный на максимальном радиусе предплечья, причем опоры плеча и предплечья и их балансировочные грузы расположены симметрично относительно общей плоскости вращения плеча и предплечья, а центр тяжести измерительной головки с дополнительным грузом находится также в этой плоскости.
2. Координатно-измерительная машина по п. 1, отличающаяся тем, что ее модульные шарниры имеют две радиально-упорные аэростатические опоры, считывающую растровую головку, закрепленную в корпусе, ротор с растровой зеркальной шкалой, зубчатое колесо, закрепленные на оси, имеющей цилиндрические и торцевые поверхности для аэростатических опор и плоскости, параллельные оси симметрии для крепления вращающихся элементов конструкции.
3. Координатно-измерительная машина по п. 1 или 2, отличающаяся тем, что для повышения ее надежности за счет увеличения рабочих зазоров более нагруженных нижних осевых аэростатических опор плеча и предплечья, дросселирующие отверстия этих опор для увеличения их несущей способности имеет большие, определяемые расчетным путем, диаметры по сравнению с диаметрами дросселирующих отверстий верхних опор.
Текст
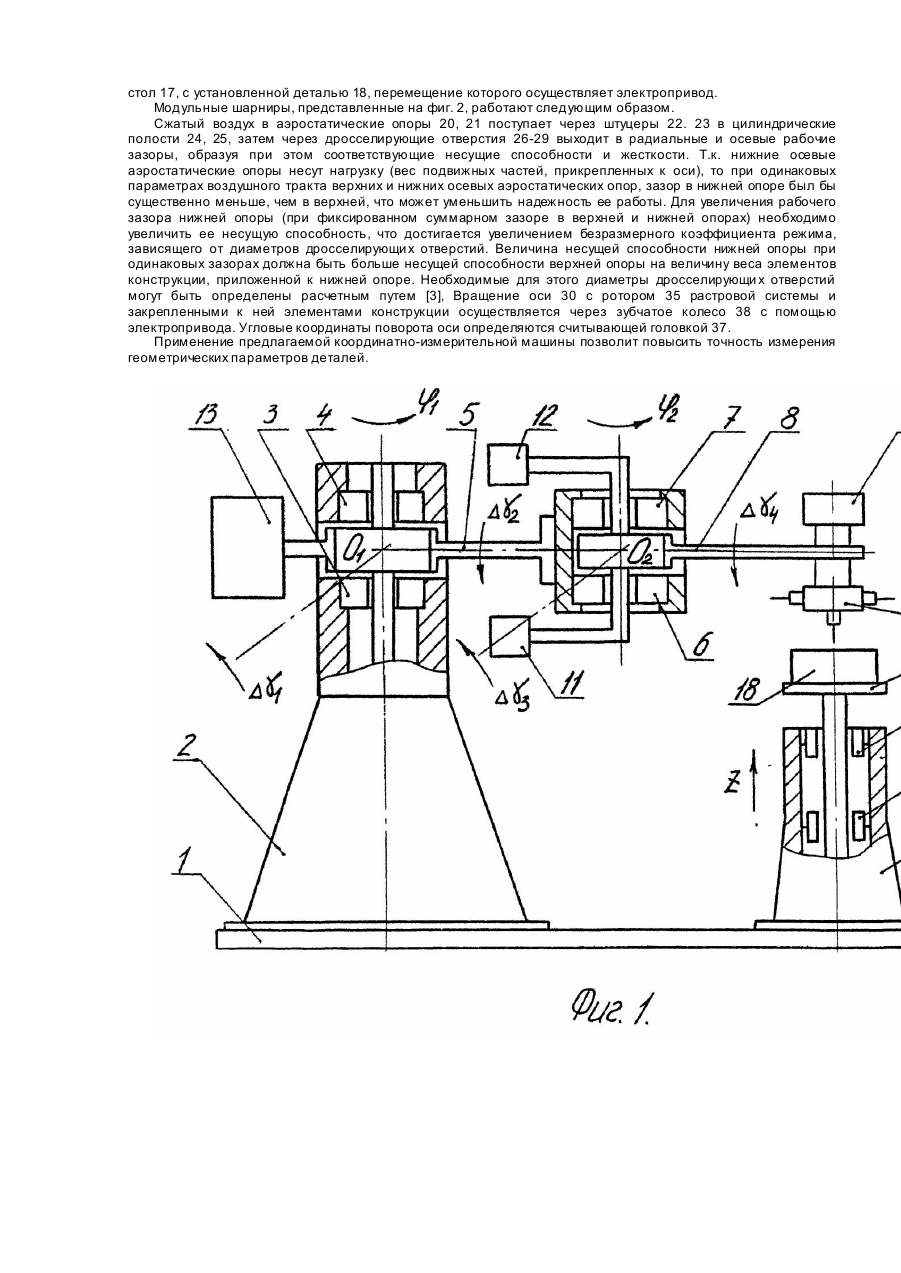
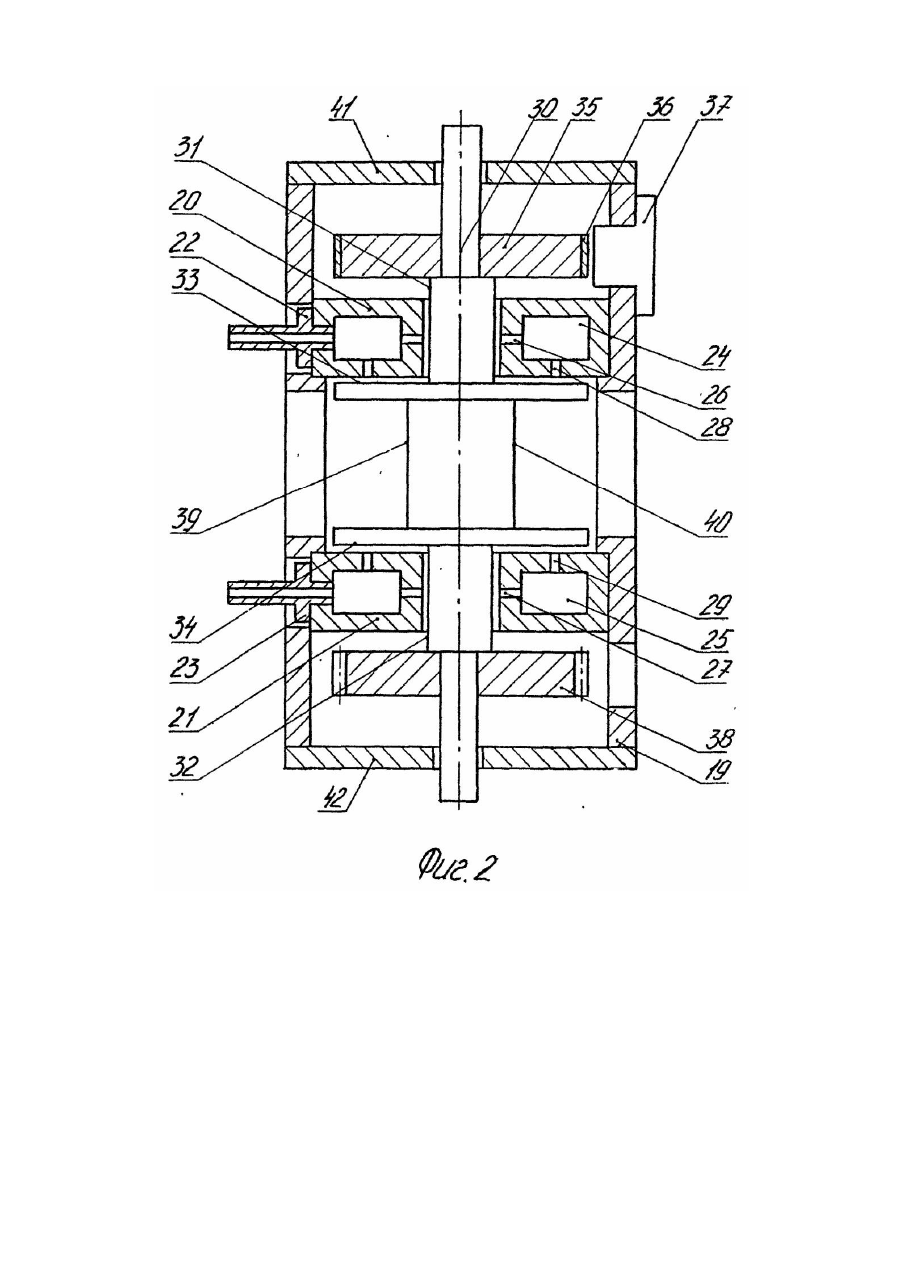
Изобретение относится к измерительной технике, а именно к устройствам, использующим координатный метод измерения, и может быть использовано для прецизионных измерений геометрических параметров деталей. Известны промышленные роботы в ангулярной цилиндрической системе координат, последнее координатное звено которых перемещается в вертикальном направлении поступательно [1]. В схва те руки таких роботов могут быть установлены различные измерительные устройства, в том числе и измерительные головки для координатных измерений, однако для прецизионных измерений деталей они не могут быть использованы из-за соизмеримости погрешностей позиционирования и допусков измеряемых деталей. Известна координатно-измерительная машина, работающая в ангулярной цилиндрической системе координат [2], которая принята в качестве прототипа изобретения. Машина содержит основание, корпус с опорами для вращения плеча с опорой предплечья и балансировочным грузом, пиноль с измерительной головкой, установленной на предплечье с возможностью перемещения в вертикальном направлении. Недостатком этой машины является то, что в процессе измерения под действием сил инерции, приложенных к центру масс пиноли, возникают угловые смещения подвижных элементов устройства, что приводит к погрешностям позиционирования измерительной головки, и соответственно к погрешностям измерения геометрических параметров деталей. Задачей изобретения является повышение точности машины за счет уменьшения угловы х смещений ее элементов. Для этого предлагаемая координатно-измерительная машина содержит в качестве одной из координат закрепленный на основании с возможностью программного перемещения в вертикальном направлении стол с измеряемыми деталями, дополнительный груз с измерительной головкой, закрепленной на максимальном радиусе предплечья, причем опоры плеча и предплечья и их балансировочные грузы расположены симметрично относительно общей плоскости вращения плеча и предплечья, а центр тяжести головки с дополнительным грузом находится также в этой плоскости. На фиг. 1 схематично изображена предлагаемая координатно-измерительная машина; на фиг. 2 модульное шарнирное устройство плеча и предплечья. На основании 1 закреплен корпус 2, в котором установлены две радиально-упорные аэростатические опоры 3 и 4, для вращения плеча 5. Плечо содержит две аэростатические радиально-упорные опоры 6, 7 для вращения предплечья 8. На максимальном радиусе предплечья закреплена измерительная головка 9. Плоскости вращения плеча 5 и предплечья 8 совпадают и расположены симметрично относительно опор 3, 4 и 6, 7. Балансировочный груз 10 предназначен для того, чтобы центр масс системы (измерительная головка 9 и балансировочный груз 10) находился в плоскости вращения плеча и предплечья. Балансировочные грузы 11,12 расположены симметрично относительно плоскости вращения плеча и предплечья и предназначены для приведения центра масс системы (измерительная головка 9, балансировочный груз 10, предплечье 8, балансировочные грузы 11,12) к центру опор О2, находящегося на оси вращения, посередине между опорами. Балансировочный груз 13 расположен симметрично относительно плоскости вращения плеча и предплечья и предназначен для приведения центра масс системы элементов, находящихся на плече 5 к центру опор O1, расположенного на оси вращения, посередине между, опорами. Корпус 14, прикрепленный к основанию 1, содержит аэростатические опоры 15, 16 для поступательного программного перемещения стола 17 в вертикальном направлении Z. На столе 17 закреплена измеряемая деталь 18. Модульные шарниры плеча и предплечья содержат корпус 19, в котором закреплены две радиальноупорные аэростатические опоры 20,21. Аэростатические опоры имеют штуцеры 22, 23 для подвода сжатого воздуха, цилиндрические полости 24,25 и дросселирующие отверстия - радиальные 26, 27 и осевые 28, 29. Ось 30 имеет цилиндрические 31,32 и торцевые 33, 34 поверхности, обращенные к аэростатическим опорам. К оси 30 закреплен ротор 35, на цилиндрической поверхности которого закреплена металлическая зеркальная растровая шкала 36. В корпусе 19 закреплена считывающая головка 37 с неподвижным растром, светодиодом и фототранзистором. Зубчатое колесо 38 для электропривода закреплено на оси 30. Ось 30 имеет плоскости 39,40 параллельные оси симметрии, которые предназначены для крепления к оси элементов конструкции. К корпусу 19 прикреплены торцевые крышки 41, 42. Выступающие из корпуса части оси 30 могут быть также использованы для крепления элементов конструкции. Координатно-измерительная машина работает следующим образом. При сборе координат точек поверхности измеряемой детали рука 5 вращается электроприводами относительно корпуса 3 на углы j1, а предплечье 8 соответственно относительно руки на углы j2 .· Стол 17 с измеряемой деталью 18 при этом перемещается поступательно с использованием электропривода в вертикальном направлении на величины Ζ. Координаты измеренных точек ( j1I , j 2I, ZI) поступают в ЭВМ, где вычисляются геометрические параметры измеряемой детали. При сборе координат точек детали возникают силы инерции, зависящие от угловых скоростей (j1, j2) и угловы х ускорений (j1, j2), приложенные к центрам масс подвижных элементов конструкции. Так как центры масс подвижных элементов предложенной конструкции совпадают с центром опор плеча O1 и центром опор предплечья O2, то величины моментов от сил инерции относительно точек Ο1 и О 2 будут равны нулю, а следовательно и составляющие угловы х перекосов плеча Dg1, Dg2 и соответственно предплечья Dg3, Dg4 будут стремиться к нулю. Реализовать это стало возможным лишь используя разделение систем координат. Вместо пиноли, размещенной на предплечье, центр масс которой меняет свое положение, координатное перемещение по оси Ζ в предложенной конструкции осуществляет не измерительная головка, а стол 17, с установленной деталью 18, перемещение которого осуществляет электропривод. Модульные шарниры, представленные на фиг. 2, работают следующим образом. Сжатый воздух в аэростатические опоры 20, 21 поступает через штуцеры 22. 23 в цилиндрические полости 24, 25, затем через дросселирующие отверстия 26-29 выходит в радиальные и осевые рабочие зазоры, образуя при этом соответствующие несущие способности и жесткости. Т.к. нижние осевые аэростатические опоры несут нагрузку (вес подвижных частей, прикрепленных к оси), то при одинаковых параметрах воздушного тракта верхних и нижних осевых аэростатических опор, зазор в нижней опоре был бы существенно меньше, чем в верхней, что может уменьшить надежность ее работы. Для увеличения рабочего зазора нижней опоры (при фиксированном суммарном зазоре в верхней и нижней опорах) необходимо увеличить ее несущую способность, что достигается увеличением безразмерного коэффициента режима, зависящего от диаметров дросселирующи х отверстий. Величина несущей способности нижней опоры при одинаковых зазорах должна быть больше несущей способности верхней опоры на величину веса элементов конструкции, приложенной к нижней опоре. Необходимые для этого диаметры дросселирующи х отверстий могут быть определены расчетным путем [3], Вращение оси 30 с ротором 35 растровой системы и закрепленными к ней элементами конструкции осуществляется через зубчатое колесо 38 с помощью электропривода. Угловые координаты поворота оси определяются считывающей головкой 37. Применение предлагаемой координатно-измерительной машины позволит повысить точность измерения геометрических параметров деталей.
ДивитисяДодаткова інформація
МПК / Мітки
Мітки: машина, координатно-вимірювальна
Код посилання
<a href="https://ua.patents.su/3-22585-koordinatno-vimiryuvalna-mashina.html" target="_blank" rel="follow" title="База патентів України">Координатно-вимірювальна машина</a>
Прально-віджимна машина

Номер патенту: 5784
Опубліковано: 29.12.1994
Автори: Ісаєнко Ірина Ігорівна, Орчинський Сергій Васильович, Усольцев Олександр Михайлович
МПК: D06F 37/00
Мітки: прально-віджимна, машина
Формула / Реферат:
Стирально-отжимная машина, содержащая стиральный бак и установленный в нём с возможностью вращения относительно горизонтальной оси перфорированный барабан, имеющий гребни для захвата ими при вращении барабана обрабатываемых текстильных изделий, закрепленные на внутренней поверхности обечайки барабана параллельно оси его вращения, каждый из которых выполнен в виде продольного выступа на обечайке, образованного двумя пересекающимися боковыми...
Спосіб усунення заднього вивиху предпліччя
Номер патенту: 10275
Опубліковано: 25.12.1996
Автор: Мітельман Наум Юдович
МПК: A61B 7/00
Мітки: предпліччя, усунення, спосіб, вивиху, заднього
Формула / Реферат:
Способ устранения заднего вывиха предплечья путем приложения усилия к локтевому отростку и подачи плеча в суставную впадину, отличающийся тем, что плечо относительно предплечья наклоняют назад под углом 130-140 градусов, после чего проталкивают предплечье вперед под блок плечевой кости до вправления.
Машина для різання рулонного килима покрівлі
Номер патенту: 14378
Опубліковано: 25.04.1997
Автори: Зеленов Петро Федорович, Сербін Анатолій Іванович, Жмаєв Анатолій Петрович, Кашлєв Іван Миколайович
МПК: E04D 15/00
Мітки: покрівлі, килима, різання, машина, рулонного
Формула / Реферат:
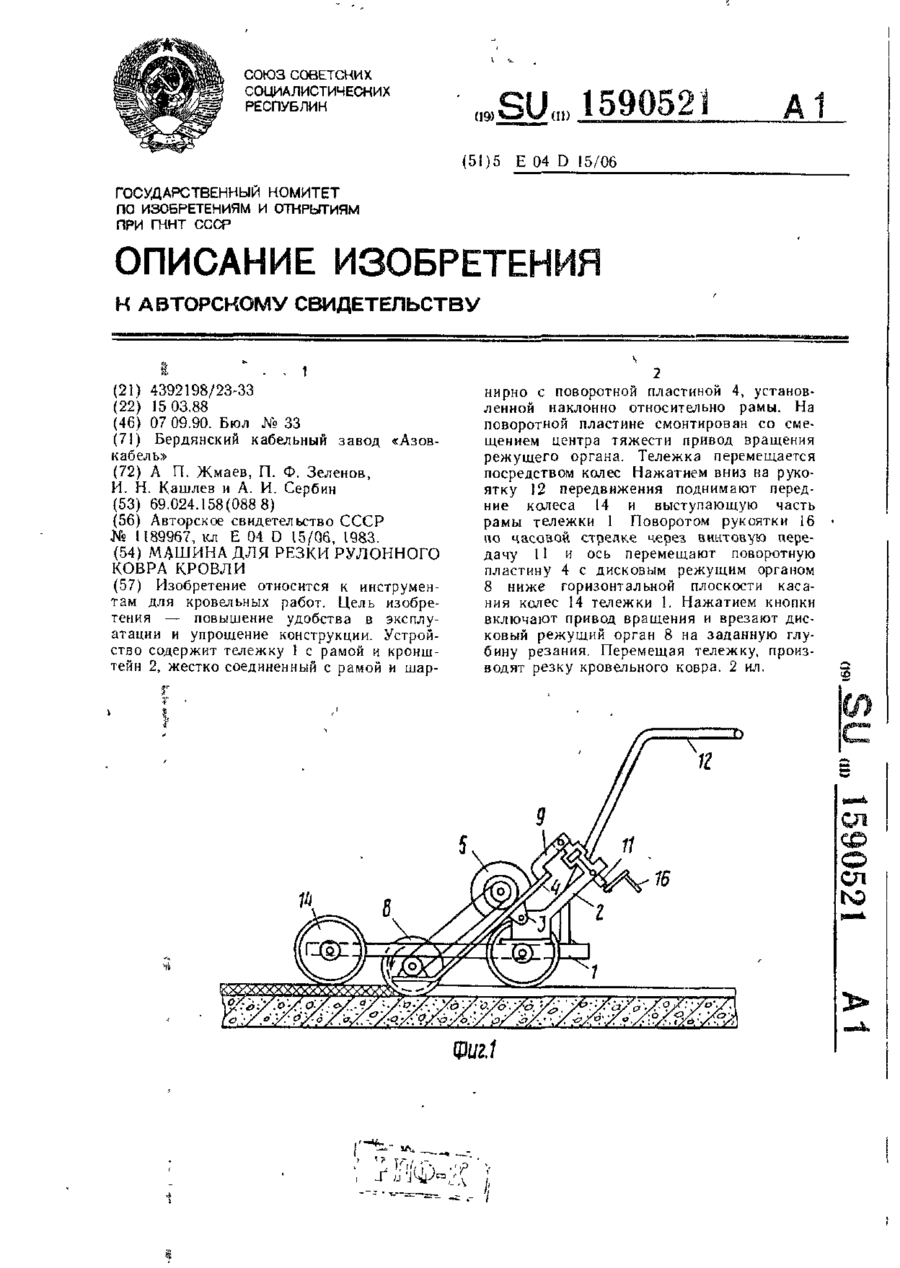
Машина для резки рулонного ковра кровли, содержащая тележку с рамой и рукояткой, дисковый режущий орган с приводом его вращения и средство для изменения глубины резания, отличающаяся тем, что, с целью повышения удобства эксплуатации и упрощения конструкции, режущий орган установлен на раме с возможностью поворота в вертикальной плоскости посредством поворотной пластины, установленной наклонно относительно рамы с помощью кронштейна,...
Машина подачі кисню і торкретування конвертеру
Номер патенту: 16420
Опубліковано: 29.08.1997
Автори: Єрмілов Вячеслав Олександрович, Манов Володимир Михайлович, Крайзінгер Федір Володимирович, Тарпіньян Дмитрій Апелович, Модерау Юрій Володимирович, Волошин Олександр Ілліч
МПК: C21C 5/48
Мітки: машина, торкретування, кисню, подачі, конвертеру
Формула / Реферат:
1. Машина для подачи кислорода и торкретирования конвертера, содержащая самоходную тележку с закрепленными на ней вертикальными направляющими, каретку и фурму с металлорука-вами и патрубками подвода кислорода, торкрет-массы и охладителя, механизм перемещения каретки в направляющих, привод вращения фурмы относительно вертикальной оси, отличающаяся тем, что, с целью сокращения времени и облегчения условий труда при замене фурмы,...
Безперервно пересувна у процесі роботи виправочнопідбивочно-обробна машина
Номер патенту: 3602
Опубліковано: 27.12.1994
Автори: Йоханн Хансманн, Йьора Ганц
МПК: E01B 27/17
Мітки: роботи, виправочнопідбивочно-обробна, пересувна, безперервної, процесі, машина
Формула / Реферат:
1. Непрерывно передвигающаяся в процессе работы выправочно-подбивочно-отделочная машина, содержащая раму, один конец которой оперт на ходовую тележку, смонтированные на раме кабину оператора, силовую установку, привод ходовой тележки, контрольно-измерительное устройство, включающее в себя базовую систему отсчета, дополнительную раму, один конец которой установлен в направляющих рамы машины, а второй оперт на вторую ходовую тележку, привод...
Попередній патент: Спосіб виділення термостабільних білків із сироватки крові
Наступний патент: Термоелектричний сплав
Випадковий патент: Каталізатор для селективного відновлення оксидів азоту аміаком та спосіб його одержання