Пристрій для прогнозування надійності металевих конструкцій
Номер патенту: 22726
Опубліковано: 25.04.2007
Автори: Яковенко Валерій Володимирович, Прядченко Дмитро Вікторович

Формула / Реферат
Пристрій для прогнозування надійності металевих конструкцій, що містить електромагніт у формі тороїда, який має N корончатих виступів (N![]() 4, парна кількість полюсів), два ферозонди, встановлені на спеціальну немагнітну підставку, електричні лінії зв'язку, електродвигун, вісь з встановленим немагнітним шпилястим покажчиком на одному кінці і ручкою на другому, вал, важіль, дві тарілки з електричними контактами, опори з гумовими прокладками, блок керування та блок обробки сигналу, який відрізняється тим, що пристрій оснащено блоком індикації та підйомними електромагнітами.
4, парна кількість полюсів), два ферозонди, встановлені на спеціальну немагнітну підставку, електричні лінії зв'язку, електродвигун, вісь з встановленим немагнітним шпилястим покажчиком на одному кінці і ручкою на другому, вал, важіль, дві тарілки з електричними контактами, опори з гумовими прокладками, блок керування та блок обробки сигналу, який відрізняється тим, що пристрій оснащено блоком індикації та підйомними електромагнітами.
Текст
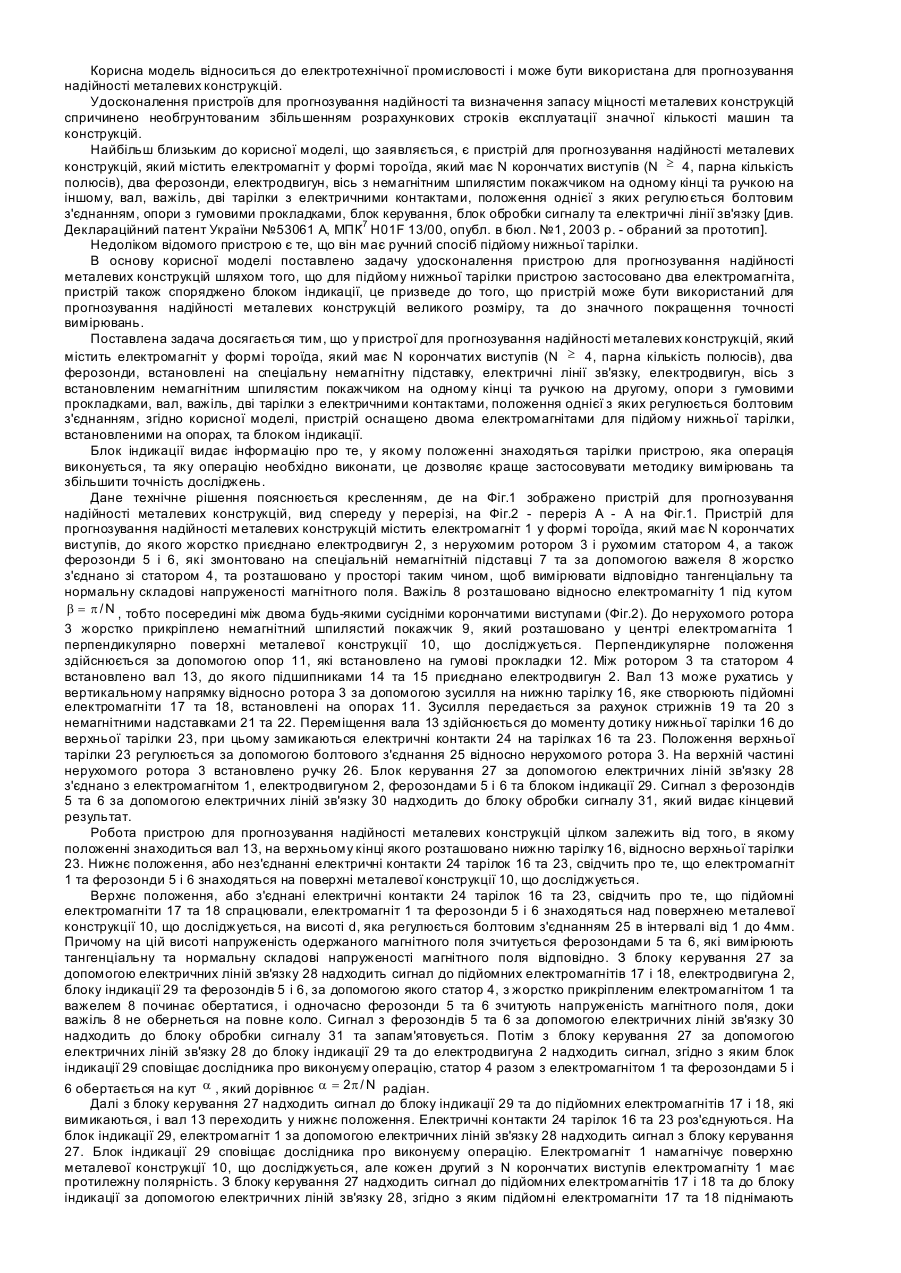
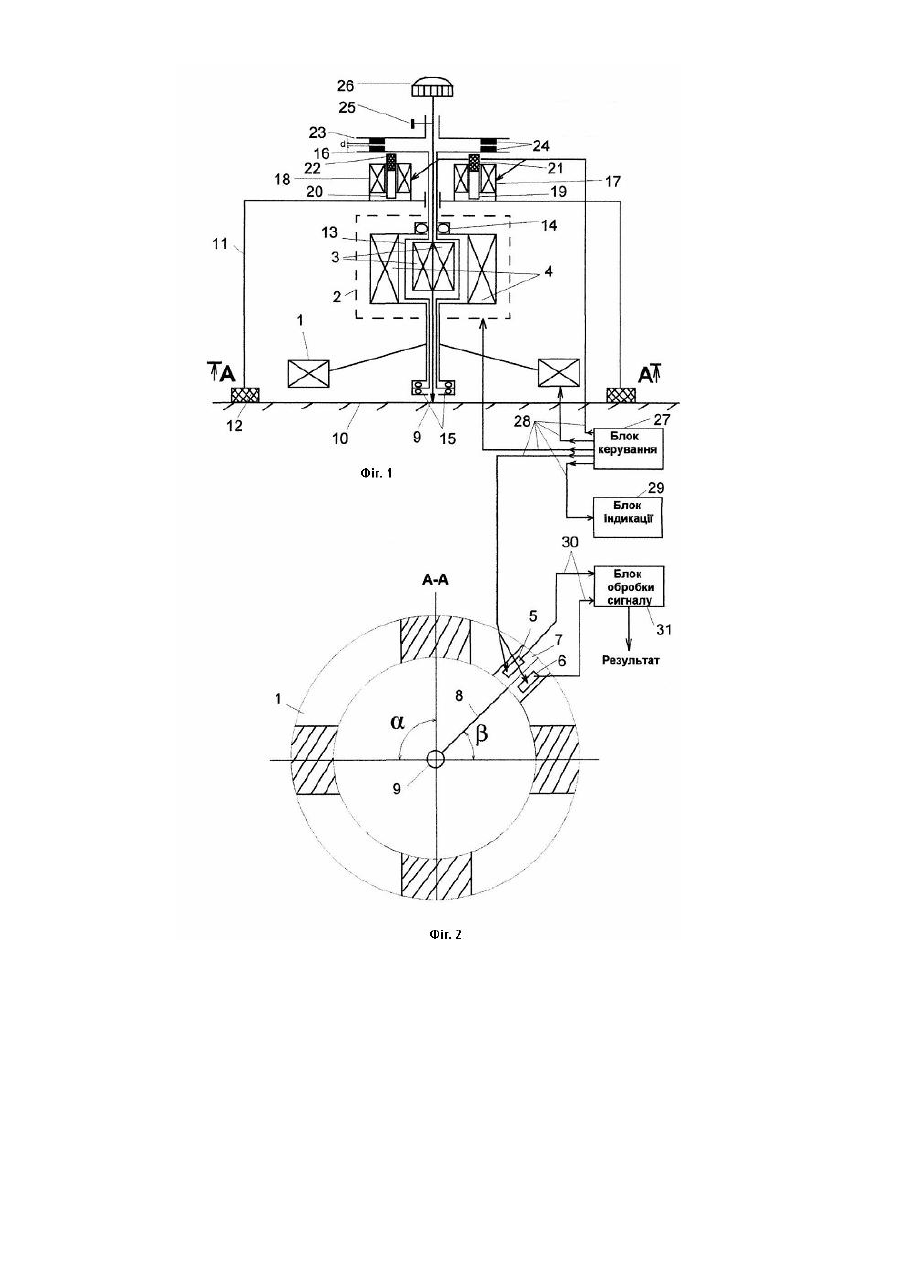
Корисна модель відноситься до електротехнічної промисловості і може бути використана для прогнозування надійності металевих конструкцій. Удосконалення пристроїв для прогнозування надійності та визначення запасу міцності металевих конструкцій спричинено необгрунтованим збільшенням розрахункових строків експлуатації значної кількості машин та конструкцій. Найбільш близьким до корисної моделі, що заявляється, є пристрій для прогнозування надійності металевих конструкцій, який містить електромагніт у формі тороїда, який має N корончатих виступів (N ³ 4, парна кількість полюсів), два ферозонди, електродвигун, вісь з немагнітним шпилястим покажчиком на одному кінці та ручкою на іншому, вал, важіль, дві тарілки з електричними контактами, положення однієї з яких регулюється болтовим з'єднанням, опори з гумовими прокладками, блок керування, блок обробки сигналу та електричні лінії зв'язку [див. Деклараційний патент України №53061 А, МПК7 Н01F 13/00, опубл. в бюл. №1, 2003 р. - обраний за прототип]. Недоліком відомого пристрою є те, що він має ручний спосіб підйому нижньої тарілки. В основу корисної моделі поставлено задачу удосконалення пристрою для прогнозування надійності металевих конструкцій шляхом того, що для підйому нижньої тарілки пристрою застосовано два електромагніта, пристрій також споряджено блоком індикації, це призведе до того, що пристрій може бути використаний для прогнозування надійності металевих конструкцій великого розміру, та до значного покращення точності вимірювань. Поставлена задача досягається тим, що у пристрої для прогнозування надійності металевих конструкцій, який містить електромагніт у формі тороїда, який має N корончатих виступів (N ³ 4, парна кількість полюсів), два ферозонди, встановлені на спеціальну немагнітну підставку, електричні лінії зв'язку, електродвигун, вісь з встановленим немагнітним шпилястим покажчиком на одному кінці та ручкою на другому, опори з гумовими прокладками, вал, важіль, дві тарілки з електричними контактами, положення однієї з яких регулюється болтовим з'єднанням, згідно корисної моделі, пристрій оснащено двома електромагнітами для підйому нижньої тарілки, встановленими на опорах, та блоком індикації. Блок індикації видає інформацію про те, у якому положенні знаходяться тарілки пристрою, яка операція виконується, та яку операцію необхідно виконати, це дозволяє краще застосовувати методику вимірювань та збільшити точність досліджень. Дане технічне рішення пояснюється кресленням, де на Фіг.1 зображено пристрій для прогнозування надійності металевих конструкцій, вид спереду у перерізі, на Фіг.2 - переріз А - А на Фіг.1. Пристрій для прогнозування надійності металевих конструкцій містить електромагніт 1 у формі тороїда, який має N корончатих виступів, до якого жорстко приєднано електродвигун 2, з нерухомим ротором 3 і рухомим статором 4, а також ферозонди 5 і 6, які змонтовано на спеціальній немагнітній підставці 7 та за допомогою важеля 8 жорстко з'єднано зі статором 4, та розташовано у просторі таким чином, щоб вимірювати відповідно тангенціальну та нормальну складові напруженості магнітного поля. Важіль 8 розташовано відносно електромагніту 1 під кутом b = p / N , тобто посередині між двома будь-якими сусідніми корончатими виступами (Фіг.2). До нерухомого ротора 3 жорстко прикріплено немагнітний шпилястий покажчик 9, який розташовано у центрі електромагніта 1 перпендикулярно поверхні металевої конструкції 10, що досліджується. Перпендикулярне положення здійснюється за допомогою опор 11, які встановлено на гумові прокладки 12. Між ротором 3 та статором 4 встановлено вал 13, до якого підшипниками 14 та 15 приєднано електродвигун 2. Вал 13 може рухатись у вертикальному напрямку відносно ротора 3 за допомогою зусилля на нижню тарілку 16, яке створюють підйомні електромагніти 17 та 18, встановлені на опорах 11. Зусилля передається за рахунок стрижнів 19 та 20 з немагнітними надставками 21 та 22. Переміщення вала 13 здійснюється до моменту дотику нижньої тарілки 16 до верхньої тарілки 23, при цьому замикаються електричні контакти 24 на тарілках 16 та 23. Положення верхньої тарілки 23 регулюється за допомогою болтового з'єднання 25 відносно нерухомого ротора 3. На верхній частині нерухомого ротора 3 встановлено ручку 26. Блок керування 27 за допомогою електричних ліній зв'язку 28 з'єднано з електромагнітом 1, електродвигуном 2, ферозондами 5 і 6 та блоком індикації 29. Сигнал з ферозондів 5 та 6 за допомогою електричних ліній зв'язку 30 надходить до блоку обробки сигналу 31, який видає кінцевий результат. Робота пристрою для прогнозування надійності металевих конструкцій цілком залежить від того, в якому положенні знаходиться вал 13, на верхньому кінці якого розташовано нижню тарілку 16, відносно верхньої тарілки 23. Нижнє положення, або нез'єднанні електричні контакти 24 тарілок 16 та 23, свідчить про те, що електромагніт 1 та ферозонди 5 і 6 знаходяться на поверхні металевої конструкції 10, що досліджується. Верхнє положення, або з'єднані електричні контакти 24 тарілок 16 та 23, свідчить про те, що підйомні електромагніти 17 та 18 спрацювали, електромагніт 1 та ферозонди 5 і 6 знаходяться над поверхнею металевої конструкції 10, що досліджується, на висоті d, яка регулюється болтовим з'єднанням 25 в інтервалі від 1 до 4мм. Причому на цій висоті напруженість одержаного магнітного поля зчитується ферозондами 5 та 6, які вимірюють тангенціальну та нормальну складові напруженості магнітного поля відповідно. З блоку керування 27 за допомогою електричних ліній зв'язку 28 надходить сигнал до підйомних електромагнітів 17 і 18, електродвигуна 2, блоку індикації 29 та ферозондів 5 і 6, за допомогою якого статор 4, з жорстко прикріпленим електромагнітом 1 та важелем 8 починає обертатися, і одночасно ферозонди 5 та 6 зчитують напруженість магнітного поля, доки важіль 8 не обернеться на повне коло. Сигнал з ферозондів 5 та 6 за допомогою електричних ліній зв'язку 30 надходить до блоку обробки сигналу 31 та запам'ятовується. Потім з блоку керування 27 за допомогою електричних ліній зв'язку 28 до блоку індикації 29 та до електродвигуна 2 надходить сигнал, згідно з яким блок індикації 29 сповіщає дослідника про виконуєму операцію, статор 4 разом з електромагнітом 1 та ферозондами 5 і 6 обертається на кут a , який дорівнює a = 2p / N радіан. Далі з блоку керування 27 надходить сигнал до блоку індикації 29 та до підйомних електромагнітів 17 і 18, які вимикаються, і вал 13 переходить у нижнє положення. Електричні контакти 24 тарілок 16 та 23 роз'єднуються. На блок індикації 29, електромагніт 1 за допомогою електричних ліній зв'язку 28 надходить сигнал з блоку керування 27. Блок індикації 29 сповіщає дослідника про виконуєму операцію. Електромагніт 1 намагнічує поверхню металевої конструкції 10, що досліджується, але кожен другий з N корончатих виступів електромагніту 1 має протилежну полярність. З блоку керування 27 надходить сигнал до підйомних електромагнітів 17 і 18 та до блоку індикації за допомогою електричних ліній зв'язку 28, згідно з яким підйомні електромагніти 17 та 18 піднімають нижню тарілку 16, і вал 13 переходить у верхнє положення, блок індикації 29 сповіщає дослідника про виконуєму операцію. Замикаються електричні контакти 24 тарілок 16 та 23, з блоку керування 27 по електричних лініях зв'язку 28 до електродвигуна 2 та до блоку індикації 29 надходить сигнал, згідно з яким блок індикації 29 сповіщає дослідника про виконуюєму операцію, статор 4 разом з електромагнітом 1 та ферозондами 5 та 6 обертається на кут a , після чого з блоку керування 27 по електричних лініях зв'язку 28 до підйомних електромагнітів 17 і 18 та до блоку індикації 29 надходить сигнал, і блок індикації 29 сповіщає дослідника про виконуєму операцію, підйомні електромагніти 17 та 18 вимикаються, і вал 13 переходить у нижнє положення. На електромагніт 1 по електричних лініях зв'язку 28 надходить сигнал з блоку керування 27, і сигнал намагнічує поверхню металевої конструкції 10, що досліджується. Це продовжується, доки електромагніт 1 не обернеться на повне коло та поверхня металевої конструкції 10, що досліджується, не буде намагнічена N+1 разів. Далі, з блоку керування 27 до підйомних електромагнітів 17 і 18 за допомогою електричних ліній зв'язку 28 надходить сигнал, і вони вмикаються. Вал 13 переходить у верхнє положення, замикаються електричні контакти 24 тарілок 16 та 23. Блок індикації 29, до якого також надходить сигнал, сповіщає дослідника про виконуєму операцію. З блоку керування 27 по електричних лініях зв'язку 28 надходить сигнал до електродвигуна 2, блоку індикації 29 та ферозондів 5 і 6, згідно з яким статор 4, до якого жорстко прикріплено електромагніт 1 та важіль 8, починає обертатися, і одночасно ферозонди 5 та 6 зчитують напруженість магнітного поля, доки важіль 8 не обернеться на повне коло, блок індикації 29 сповіщає дослідника про виконуєму операцію. Сигнал з ферозондів 5 і 6 по електричних лініях зв'язку 30 надходить до блоку обробки сигналу 31 та запам'ятовується. Обидва сигнали після одного намагнічування та після N + 1 намагнічувань у блоці обробки сигналу 31 розкладаються по гармоніках та порівнюються коефіцієнти при відповідних гармоніках. В результаті блок обробки сигналу 31 видає інформацію про те, в якому стані знаходиться металева конструкція 10, що досліджується: непридатна для подальшої експлуатації, придатна для подальшої експлуатації (у полегшеному чи нормальному режимі), що дозволить не перевантажувати ненадійні конструкції, а також визначати непридатні для подальшої роботи конструкції та уникнути поломок і аварій під час їхньої експлуатації.
ДивитисяДодаткова інформація
Назва патенту англійськоюDevice for reliability prediction of metal constructions
Автори англійськоюYakovenko Valerii Volodymyrovych
Назва патенту російськоюУстройство прогнозирования надежности металлических конструкций
Автори російськоюЯковенко Валерий Владимирович
МПК / Мітки
МПК: H01F 13/00
Мітки: конструкцій, металевих, прогнозування, надійності, пристрій
Код посилання
<a href="https://ua.patents.su/3-22726-pristrijj-dlya-prognozuvannya-nadijjnosti-metalevikh-konstrukcijj.html" target="_blank" rel="follow" title="База патентів України">Пристрій для прогнозування надійності металевих конструкцій</a>
Пристрій для прогнозування надійності металевих конструкцій
Номер патенту: 53061
Опубліковано: 15.01.2003
Автори: Яковенко Валерій Володимирович, Жученко Наталія Олександрівна
МПК: H01F 13/00
Мітки: надійності, конструкцій, металевих, пристрій, прогнозування
Формула / Реферат:
Пристрій для прогнозування надійності металевих конструкцій, що містить електромагніт у формі тороїду, ферозонди та електричні лінії зв'язку, який відрізняється тим, що електромагніт у формі тороїду має N корончатих виступів (N³ 4, парна кількість полюсів), а два ферозонди встановлено на спеціальну немагнітну підставку, пристрій також оснащено електродвигуном, віссю з закріпленим немагнітним шпилястим покажчиком на одному кінці та...
Пристрій для прогнозування надійності металевих конструкцій
Номер патенту: 22579
Опубліковано: 25.04.2007
Автори: Прядченко Дмитро Вікторович, Яковенко Валерій Володимирович
МПК: H01F 13/00
Мітки: надійності, конструкцій, прогнозування, металевих, пристрій
Формула / Реферат:
Пристрій для прогнозування надійності металевих конструкцій, що містить електромагніт у формі тороїда, два ферозонди та електричні лінії зв'язку, електродвигун, вісь з встановленим немагнітним шпилястим покажчиком, вал, важіль, дві тарілки з електричними контактами, опори з гумовими прошарками, блок керування та блок обробки сигналу, який відрізняється тим, що як електродвигун застосовані немагнітні механічні деталі, електромагніт у формі...
Система керування пристроєм для прогнозування надійності металевих конструкцій
Номер патенту: 4993
Опубліковано: 15.02.2005
Автори: Полтавцев Андрій Юрійович, Жученко Наталія Олександрівна, Яковенко Валерій Володимирович, Мушкаєв Ярослав Володимирович
МПК: H01F 7/08
Мітки: металевих, керування, надійності, пристроєм, прогнозування, конструкцій, система
Формула / Реферат:
Система керування пристроєм для прогнозування надійності металевих конструкцій, що містить пристрій синхронізації, до якого приєднано двійковий лічильник, виходи якого з'єднано з запам'ятовуючим пристроєм, яка відрізняється тим, що систему керування забезпечено блоком заборони розрахунку, блоком ручного керування, блоком скидання, блоком індикації, схемою комутації електромагніта, схемою комутації ферозонда, схемою комутації крокового...
Пристрій для електрофізичної обробки металевих конструкцій ds10
Номер патенту: 43290
Опубліковано: 15.11.2001
Автори: Свистунов Микола Васильович, Сокирко Володимир Арсентійович, Дівак Павло Павлович
МПК: H01F 13/00
Мітки: конструкцій, пристрій, обробки, електрофізичної, металевих
Формула / Реферат:
Пристрій для електрофізичної обробки металевих конструкцій який містить автоматичний вимикач, тиристорний регулятор величини напруги на первинній обмотці трансформатора, силовий трансформатор, силовий випрямляч, силовий елемент зворотного зв'язку по струму, блок реверсування, а також систему регулювання величиною і напрямком струму, яка містить блок живлення, блок керування тиристорами й оптронною розв'язкою, плату зворотного зв'язку по...
Пристрій для термоабразивного очищення металевих та бетонних конструкцій
Номер патенту: 7194
Опубліковано: 30.06.1995
Автори: Демид Михайло Петрович, Олійник Тарас Йосипович, Кузик Богдан Іванович, Студент Михайло Михайлович, Лавришин Богдан Миколайович, Фенчин Святослав Володимирович, Гевський Ярослав Ярославович
МПК: E21C 37/16, E21B 7/14
Мітки: пристрій, очищення, бетонних, конструкцій, термоабразивного, металевих
Формула / Реферат:
Пристрій для термоабразивного очищення металевих та бетонних конструкцій, який включає камеру згоряння, по осі симетрії якої з одного боку вмонтоване сопло для виходу газів із камери згоряння, а з другого- вузол подачі абразивного матеріалу, а також трубопроводи для подачі окислювача та пального до камери згоряння, що відрізняється тим, що камера згоряння утворена двома конусними оболонками, що з'єднані основами, осі яких розташовані по осі...
Попередній патент: Поршень
Наступний патент: Спосіб переробки відходів збагачення залізистих кварцитів
Випадковий патент: Штамп для формування канавок на трубі