Спосіб визначення моменту інерції тіла складної форми
Номер патенту: 23958
Опубліковано: 31.08.1998
Автори: Карабан Володимир Миколайович, Нечуйвітер Леонід Іванович, Чечельницький Станіслав Борисович, Богарсуков Сергій Іванович, Горлов Олег Петрович, Гаркуша Павло Миколайович
Формула / Реферат
Способ определения момента инерции тела сложной формыс учетом трения при свободных затухающих колебаниях физического и нитяного маятников, включающий вычисление периодов колебаний как для испытуемого тела или изделия, так и для эталона, близкого к телу или изделию по геометрии, на одном и том же маятнике с одними и теми же элементами крепления, отличающийся тем, что маятники отклоняют на угол не менее 8° и при совершении ими свободных затухающих колебаний в нескольких, но не менее, чем в четырех одних и тех же для тела и эталона фиксированных интервалах углов, вычисляют средние периоды колебаний и на их основе по известным формулам определяют приближенные значения моментов инерции и поправок на трение, а уточненное значение момента инерции тела сложной формы вычисляют по формуле:
где Iт - среднеарифметическое значение момента инерции тела сложной формы;
Iот' - приближенное значение момента инерции тела без учета трения в і-том фиксированном интервале углов jо - jm;
εэΤ| - поправка на трение - погрешность определения момента инерции в том же І-том фиксированном интервале углов jо - jm;
n - число фиксированных интервалов углов маятника.
Текст
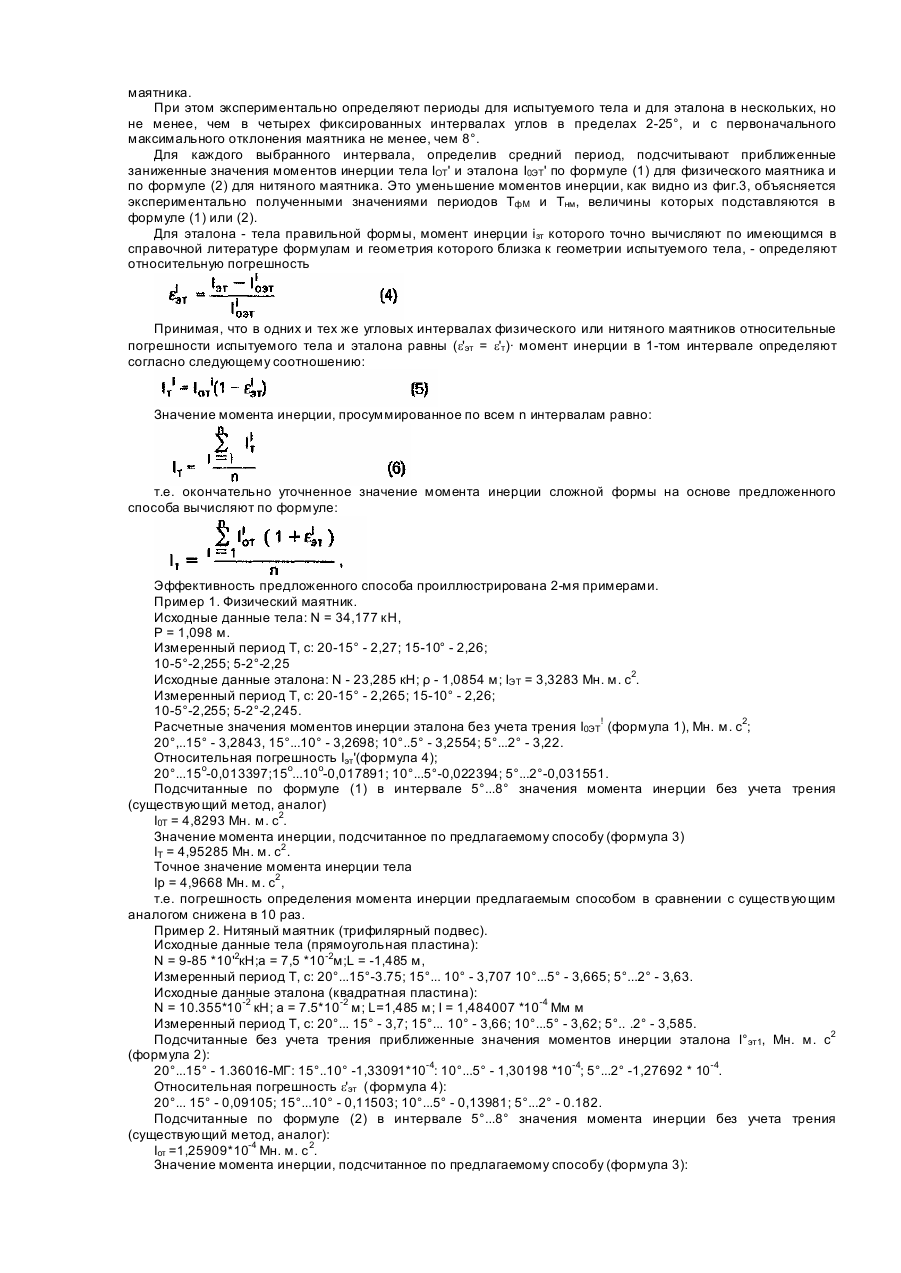
Изобретение относится к области техники измерений в машиностроении и предназначено для определения моментов инерции тел сложной формы-деталей, узлов, механизмов и изделий в целом. Наиболее близким к предлагаемому является способ определения динамических параметров механизма [1], при котором определение момента инерции I механизма осуществляют с параллельным вычислением коэффициента вязкого трения и момента сил сухого трения. В этом случае измеряются период свободных затухающи х колебаний и четыре значения любых следующи х друг за другом амплитуд колебаний рассматриваемого механизма. Недостаток этого способа заключается в том, что период предполагается одинаковым при любых амплитудах затухающи х колебаний, что противоречит опытным данным Вторым его существенным недостатком является то обстоятельство, что он основан на подсчете момента инерции и других указанных параметров по известной жесткости рассматриваемого механизма, определение которой, расчетное или экспериментальное, всегда сопряжено со значительными погрешностями. В основу изобретения поставлена задача усовершенствования способа определения моментов инерции путем точного определения периода колебаний в строго фиксированном интервале углов j 0 - jm маятника с определением* приближенного, без учета трения, значения момента инерции и поправки на трение, определяемой с помощью эталона. Поставленная задача решается тем, что в способе определения момента инерции тела сложной формы с учетом трения при свободных затухающих колебаниях физического и нитяного маятников, включающем вычисление периодов колебаний как для испытуемого тела или изделия, так и для эталона, близкого к телу или изделию по геометрии, на одном и том же маятнике с одними и теми же элементами крепления, согласно изобретению, маятники отклоняют на угол не менее 8° и при совершении ими свободных затухающи х колебаний в нескольких, но не менее, чем в четырех одних и тех же для тела и эталона фиксированных интервалах углов, вычисляют средние периоды колебаний и на их основе по известным формулам определяют приближенные значения моментов инерции и поправок на трение, а уточненное значение момента инерции тела сложной формы вычисляют по формуле где Iт - среднеарифметическое значение момента инерции тела; Ioт' - приближенное значение момента инерции без учета трения в i-том фиксированном интервале углов; e'эт - поправка на трение - погрешность определения момента инерции - в том же I-том интервале углов; n - число фиксированных интервалов углов маятника. Использование способа определения момента инерции тела сложной формы с учетом трения при свободных затухающи х колебаниях физического или нитяного маятников кроме повышения точности дает возможность в ряде случаев заменить дорогостоящие испытания изделий в эксплуатационных условиях сравнительно недорогими стендовыми испытаниями. В частности, заменить определение моментов инерции самолетов в полетных условиях испытаниями в условиях цеха или ангара с соответствующим подвешиванием их на физическом или нитяном маятниках. Предложенный способ определения момента инерции тела важнейшего параметра динамической системы, без точного знания которого нельзя осуществи ть ни ее динамический расчет, ни прогнозировать зоны ее устойчивой и неустойчивой работы - стал возможен благодаря использованию в основе изобретения обнаруженных авторами физических явлений и зависимостей, благодаря которым было установлено, что заниженные значения моментов инерции связаны не только с уменьшением интервала углов j0 - jm, но и с уменьшением периода колебаний при увеличении трения в системе (фиг.3). На фиг.1 изображена схема физического маятника; на фиг.2 - схема нитяного маятника; на фиг.3 - схема обобщенных зависимостей периодов физического ТфМ и нитяного Тнм маятников от углового интервала их колебаний (φο-φm). Обозначения, принятые на чертежах, выражают: φ - угол отклонения маятника от положения устойчивого равновесия; О - центр качания физического маятника; Οi - центр масс физического маятника; Трфм - расчетное значение периода колебаний физического маятника, момент инерции которого IpФМ точно известен; Трнм - расчетное значение периода колебаний нитяного маятника, момент инерции которого Iрнм точно известен; Тфм - экспериментально полученные обобщенные значения периодов колебаний физического маятника; Тнм - экспериментально полученные обобщенные значения периодов колебаний нитяного маятника. Предлагаемый способ осуществляют следующим образом. Вначале для эталона, близкого к испытуемому телу по геометрии, момент инерции которого может быть точно подсчитан по имеющимся в справочной литературе формулам, и закрепляемого на том же маятнике с теми же элементами крепления, что и испытуемое тело, определяют в строго фиксированных угловых интервалах маятника период его колебаний и по формулам, не учитывающим трение, подсчитывают приближенное значение момента инерции и относительную погрешность эталона e'эт. Затем подвешивают испытуемое тело и в те х же интервалах угловы х колебаний маятника определяют для него период затухающи х колебаний. Сам маятник из положения равновесия выводят вручную с постепенным увеличением размаха колебаний до требуемого устойчивого интервала исследуемого процесса с фиксацией углового интервала и времени либо визуально с помощью шкалы углов и секундомера, либо автоматически с помощью соответствующи х датчиков угло вых перемещений маятника и приборов, регистрирующих как сами перемещения, так и время, за которое они осуществляются, при условии, что эти датчики не допускают дополнительного сопротивления движению маятника. При этом экспериментально определяют периоды для испытуемого тела и для эталона в нескольких, но не менее, чем в четырех фиксированных интервалах углов в пределах 2-25°, и с первоначального максимального отклонения маятника не менее, чем 8°. Для каждого выбранного интервала, определив средний период, подсчитывают приближенные заниженные значения моментов инерции тела IОТ' и эталона I0ЭТ' по формуле (1) для физического маятника и по формуле (2) для нитяного маятника. Это уменьшение моментов инерции, как видно из фиг.3, объясняется экспериментально полученными значениями периодов ТфМ и Тнм , величины которых подставляются в формуле (1) или (2). Для эталона - тела правильной формы, момент инерции і зт которого точно вычисляют по имеющимся в справочной литературе формулам и геометрия которого близка к геометрии испытуемого тела, - определяют относительную погрешность Принимая, что в одних и тех же угловых интервалах физического или нитяного маятников относительные погрешности испытуемого тела и эталона равны (e'эт = e'т)· момент инерции в 1-том интервале определяют согласно следующему соотношению: Значение момента инерции, просуммированное по всем n интервалам равно: т.е. окончательно уточненное значение момента инерции сложной формы на основе предложенного способа вычисляют по формуле: Эффективность предложенного способа проиллюстрирована 2-мя примерами. Пример 1. Физический маятник. Исходные данные тела: N = 34,177 кН, Р = 1,098 м. Измеренный период Т, с: 20-15° - 2,27; 15-10° - 2,26; 10-5°-2,255; 5-2°-2,25 Исходные данные эталона: N - 23,285 кН; ρ - 1,0854 м; IЭТ = 3,3283 Мн. м. с2. Измеренный период Т, с: 20-15° - 2,265; 15-10° - 2,26; 10-5°-2,255; 5-2°-2,245. Расчетные значения моментов инерции эталона без учета трения I0ЭТ! (формула 1), Мн. м. с2; 20°,..15° - 3,2843, 15°...10° - 3,2698; 10°..5° - 3,2554; 5°...2° - 3,22. Относительная погрешность Iэт'(формула 4); 20°...15ο-0,013397;15ο...10ο-0,017891; 10°...5°-0,022394; 5°...2°-0,031551. Подсчитанные по формуле (1) в интервале 5°...8° значения момента инерции без учета трения (существующий метод, аналог) I0Т = 4,8293 Мн. м. с2. Значение момента инерции, подсчитанное по предлагаемому способу (формула 3) IТ = 4,95285 Мн. м. с2 . Точное значение момента инерции тела Iр = 4,9668 Мн. м. с2 , т.е. погрешность определения момента инерции предлагаемым способом в сравнении с существующим аналогом снижена в 10 раз. Пример 2. Нитяный маятник (трифилярный подвес). Исходные данные тела (прямоугольная пластина): N = 9-85 *10'2кН;а = 7,5 *10-2м;L = -1,485 м, Измеренный период Т, с: 20°...15°-3.75; 15°... 10° - 3,707 10°...5° - 3,665; 5°...2° - 3,63. Исходные данные эталона (квадратная пластина): N = 10.355*10-2 кН; а = 7.5*10 -2 м; L=1,485 м; I = 1,484007 *10-4 Мм м Измеренный период Т, с: 20°... 15° - 3,7; 15°... 10° - 3,66; 10°...5° - 3,62; 5°.. .2° - 3,585. Подсчитанные без учета трения приближенные значения моментов инерции эталона I°эт1, Мн. м. с2 (формула 2): 20°...15° - 1.36016-МГ: 15°..10° -1,33091*10-4: 10°...5° - 1,30198 *10-4; 5°...2° -1,27692 * 10 -4. Относительная погрешность e'эт (формула 4): 20°... 15° - 0,09105; 15°...10° - 0,11503; 10°...5° - 0,13981; 5°...2° - 0.182. Подсчитанные по формуле (2) в интервале 5°...8° значения момента инерции без учета трения (существующий метод, аналог): Ιοτ =1,25909*10-4 Мн. м. с 2. Значение момента инерции, подсчитанное по предлагаемому способу (формула 3): IТ= 1,4481*10-4Мн. м. с2. Точное значение момента инерции испытуемой прямоугольной пластины Iр= 1,47211·*10-4Мн. м. с2, т.е. погрешность определения момента инерции предлагаемым способом в сравнении с существующим аналогом снижена в 10 раз.
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for determination of moment of inertia of body with complicated shape
Автори англійськоюGarkusha Pavlo Mykolaiovych, Karaban Volodymyr Mykolaiovych, Gorlov Oleh Petrovych, Chechelnitskyi Stanislav Borysovych, Bogarsukov Sergii Ivanovych
Назва патенту російськоюСпособ определения момента инерции тела сложной формы
Автори російськоюГаркуша Павел Николаевич, Карабан Владимир Николаевич, Горлов Олег Петрович, Чечельницкий Станислав Борисович, Богарсуков Сергей Иванович
МПК / Мітки
МПК: G01M 1/10
Мітки: складної, форми, інерції, тіла, моменту, визначення, спосіб
Код посилання
<a href="https://ua.patents.su/3-23958-sposib-viznachennya-momentu-inerci-tila-skladno-formi.html" target="_blank" rel="follow" title="База патентів України">Спосіб визначення моменту інерції тіла складної форми</a>
Спосіб визначення моменту розкриття прес-форми машини лиття під тиском
Номер патенту: 7418
Опубліковано: 29.09.1995
Автори: Лигоцький Ігор Леонідович, Церковницький Микола Сергійович, Сорокін Микола Олександрович, Богушевський Володимир Святославович
МПК: B22D 17/32
Мітки: моменту, визначення, спосіб, тиском, машини, розкриття, лиття, прес-форми
Формула / Реферат:
Способ определения момента раскрытия пресс-формы машины литья под давлением, преимущественно при производстве деталей из сплавов, имеющих фазовые превращения при температурах ниже температуры солидуса, включающий введение расплавленного металла известной температуры в полость пресс-формы, кристаллизацию его, измерение температуры в точке пресс-формы и удаление затвердевшей отливки при снижении температуры на 5-10°С ниже температуры фазового...
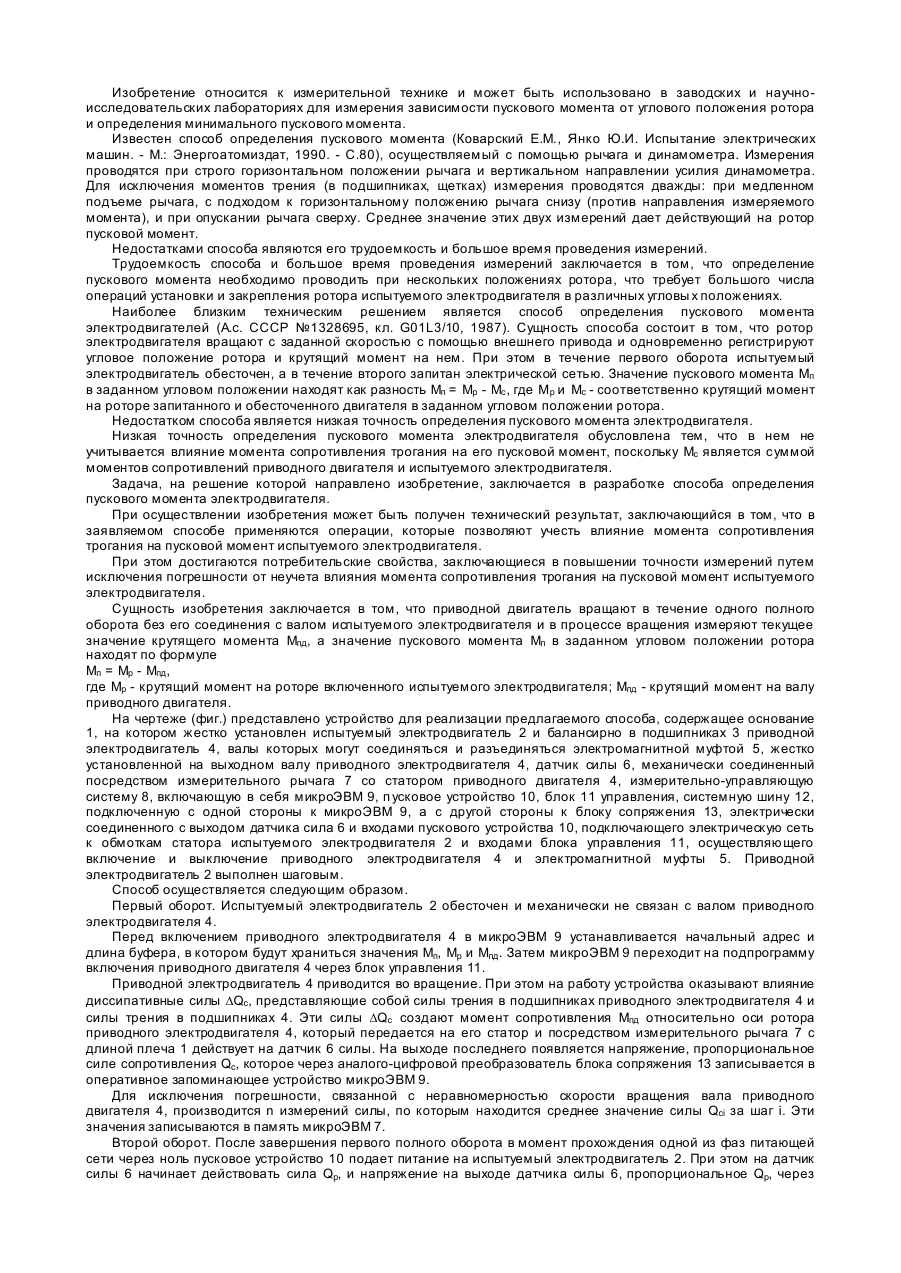
Спосіб визначення пускового моменту електродвигуна
Номер патенту: 21636
Опубліковано: 06.01.1998
Автори: Кучерук Володимир Юрійович, Кулаков Павло Ігоревич, Поджаренко Володимир Олександрович, Лещенко Анатолій Володимирович, Кухарчук Василь Васильович
МПК: G01L 3/10
Мітки: пускового, спосіб, моменту, визначення, електродвигуна
Формула / Реферат:
Способ определения пускового момента электродвигателя путем регистрации текущего значения крутящего момента Мc на роторе включенного испытуемого электродвигателя, вращаемого с заданной скоростью внешним приводом, где одновременно с вращением ротора регистрируют текущий угол его поворота, причем до подачи питания на испытуемый электродвигатель в течение одного оборота регистрируют текущее значение действующего на ротор крутящего момента Mс,...
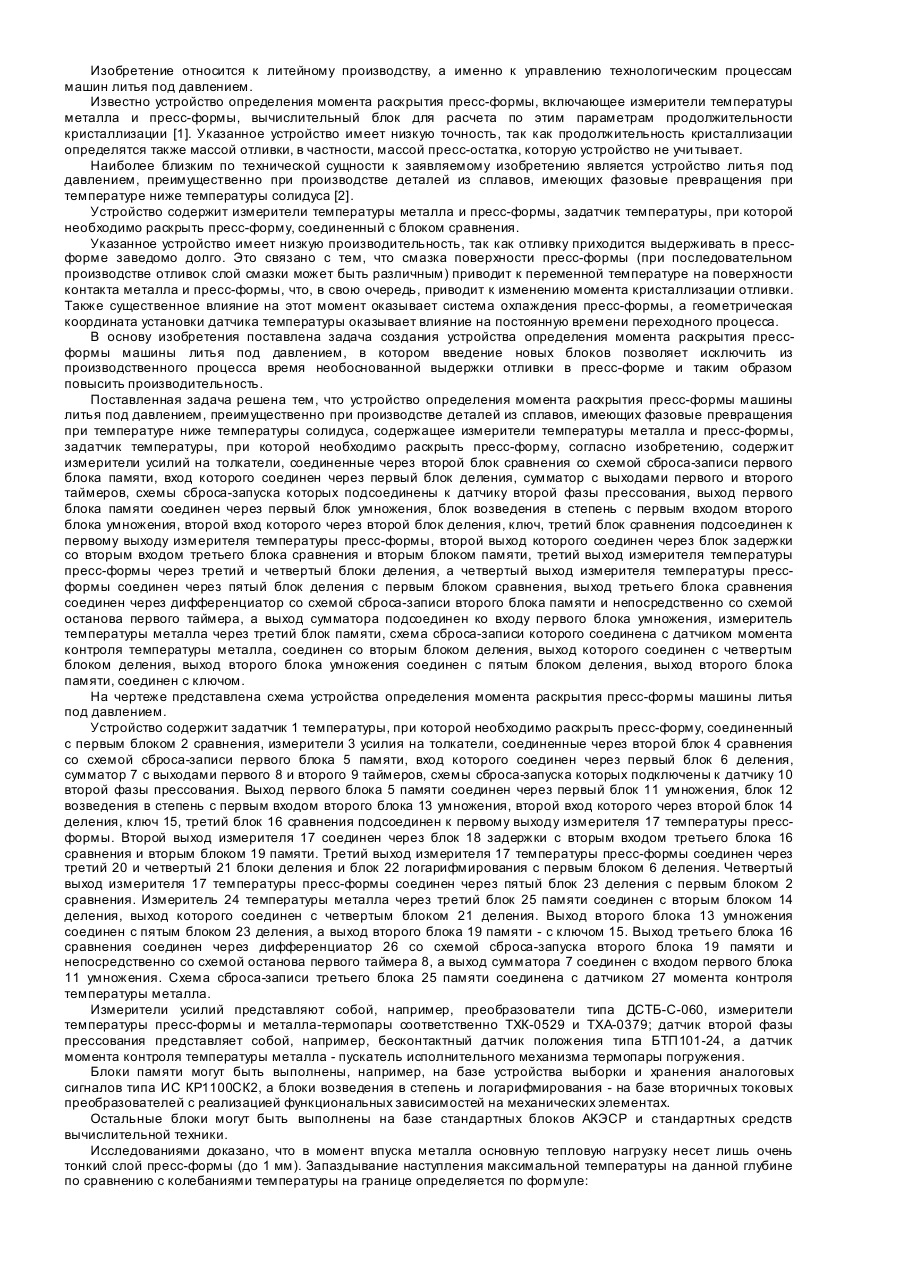
Пристрій визначення моменту розкриття прес-форми машини лиття під тиском
Номер патенту: 2972
Опубліковано: 26.12.1994
Автори: Церковницький Микола Сергійович, Богушевський Володимир Святославович, Лигоцький Ігор Леонідович, Сорокін Микола Олександрович
МПК: B22D 17/32
Мітки: моменту, визначення, машини, пристрій, тиском, прес-форми, розкриття, лиття
Формула / Реферат:
Устройство определения момента раскрытия пресс-формы машины литья под давлением, преимущественно при производстве деталей из сплавов, имеющих фазовые превращения при температуре ниже температуры солидуса, содержащее измерители температуры металла и пресс-формы, задатчик температуры, при которой необходимо раскрыть пресс-форму, соединенную с блоком сравнения, отличающееся тем, что оно дополнительно содержит измерители усилий на толкатели,...
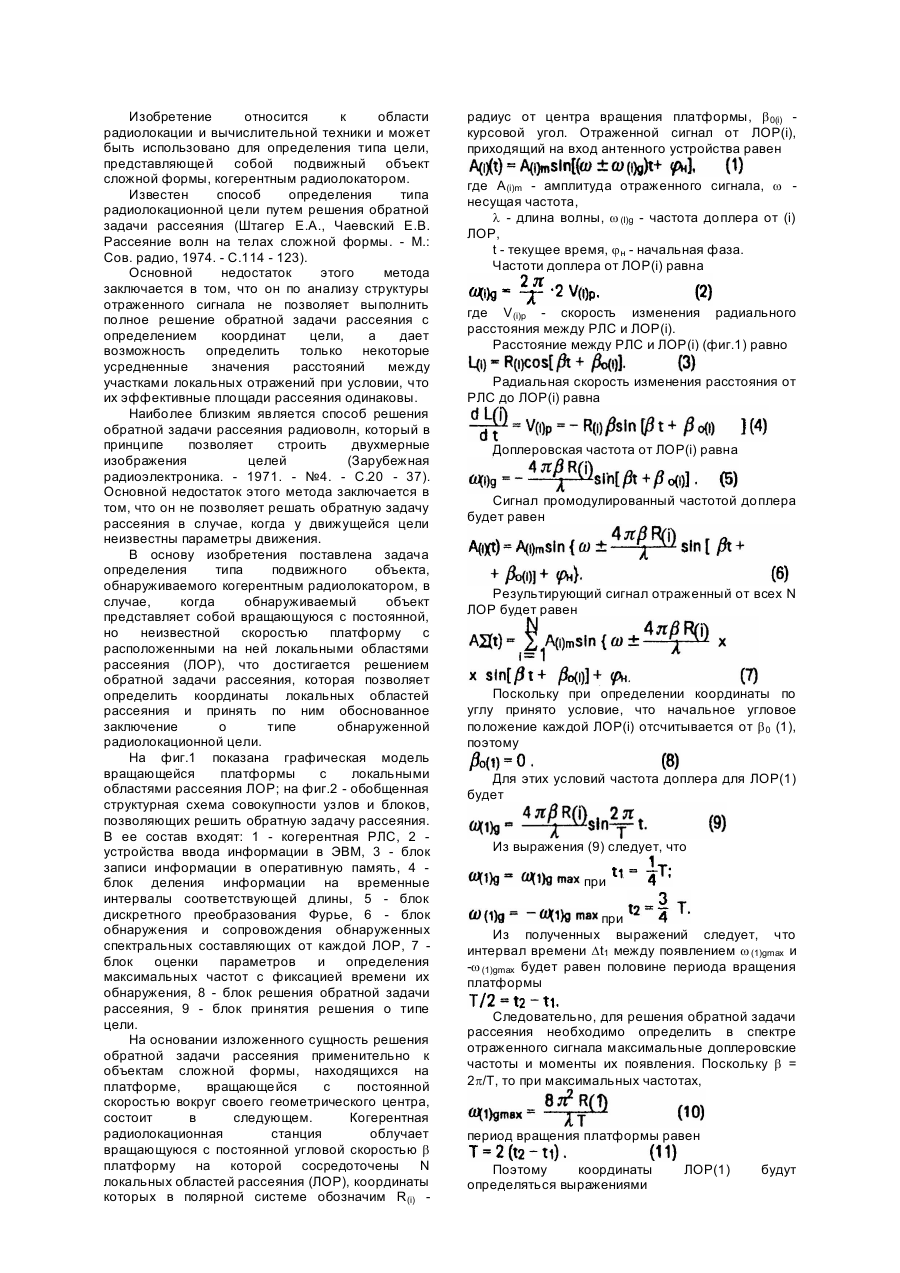
Спосіб аналізу електродинамічних характеристик рухомих об’єктів складної форми
Номер патенту: 24561
Опубліковано: 04.08.1998
Автори: Говоров Валентін Сергійович, Кропачев Виктор Степанович, Сопін Микола Павлович, Краснов Леонід Михайлович
МПК: G01R 33/02
Мітки: об'єктів, електродинамічних, форми, характеристик, рухомих, складної, аналізу, спосіб
Формула / Реферат:
Способ анализа электродинамических характеристик подвижных объектов сложной формы, состоящий в облучении объекта непрерывным сигналом, приеме отраженных сигналов, проведении спектрального анализа отраженного сигнала, определении амплитуд и фаз экстремальных спектральных составляющих, вычислении на их основе относительной дальности и поперечных расстояний между локальными областями рассеяния, отличающийся тем, что дополнительно определяют...
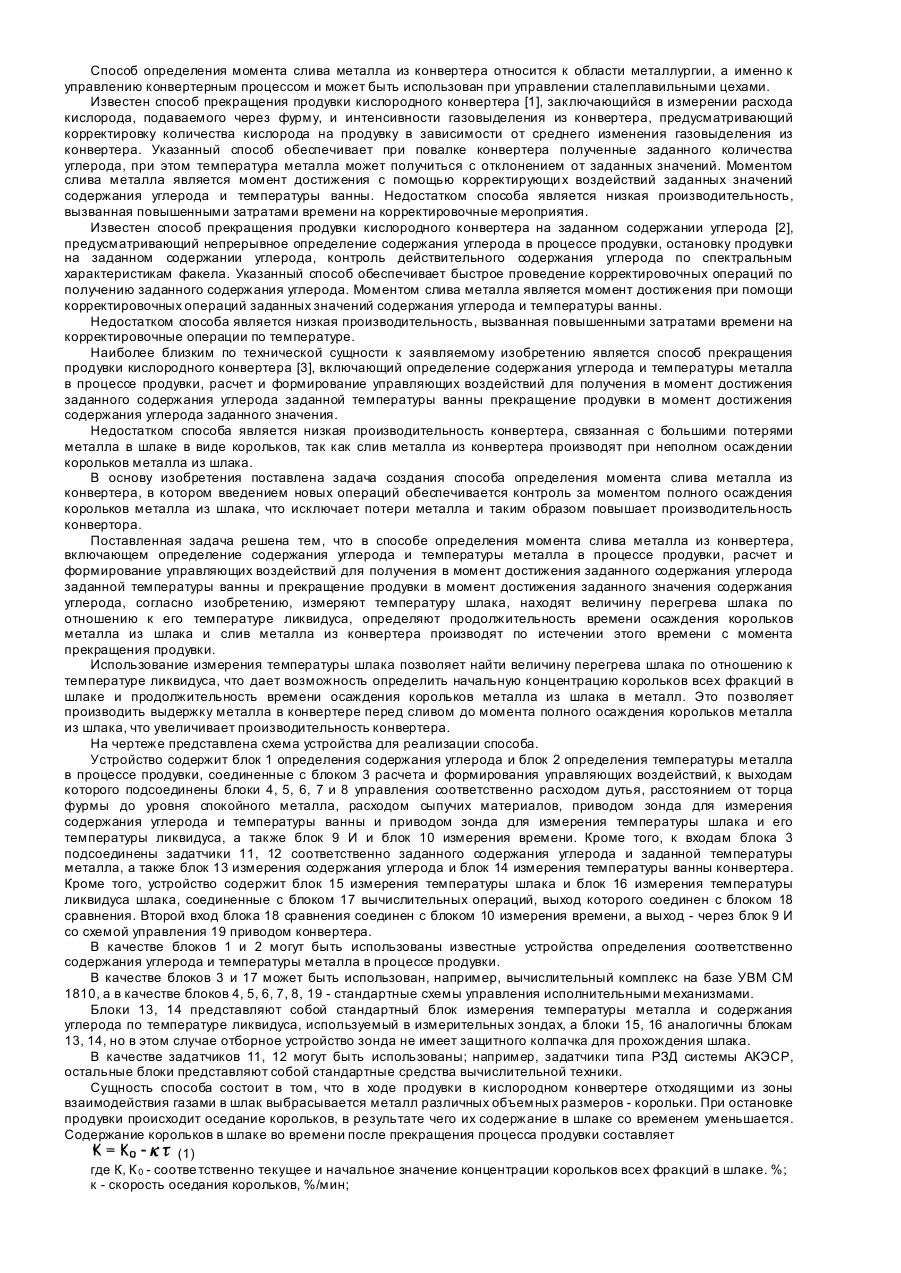
Спосіб визначення моменту зливання металу з конвертера
Номер патенту: 2970
Опубліковано: 26.12.1994
Автори: Сорокін Микола Олександрович, Лигоцький Ігор Леонідович, Богушевський Володимир Святославович, Церковницький Микола Сергійович
МПК: C21C 5/30
Мітки: моменту, спосіб, металу, визначення, зливання, конвертера
Формула / Реферат:
Способ определения момента слива металла из конвертера, включающий определение содержания углерода и температуры металла в процессе продувки, расчет и формирование управляющих воздействий для получении в момент достижения заданного содержания углерода заданной температуры ванны и прекращение продувки в момент достижения заданного значениясодержания углерода, отличающийся тем, что дополнительно измеряют температуру шлака, находят величину...
Попередній патент: Резонансний датчик тиску
Наступний патент: Спосіб знезаражування рідин і пристрій для його здійснення
Випадковий патент: Муфта