Спосіб аналізу електродинамічних характеристик рухомих об’єктів складної форми
Номер патенту: 24561
Опубліковано: 04.08.1998
Автори: Кропачев Виктор Степанович, Сопін Микола Павлович, Говоров Валентін Сергійович, Краснов Леонід Михайлович
Формула / Реферат
Способ анализа электродинамических характеристик подвижных объектов сложной формы, состоящий в облучении объекта непрерывным сигналом, приеме отраженных сигналов, проведении спектрального анализа отраженного сигнала, определении амплитуд и фаз экстремальных спектральных составляющих, вычислении на их основе относительной дальности и поперечных расстояний между локальными областями рассеяния, отличающийся тем, что дополнительно определяют время появления и значения максимальных доплеровских частот, по которым вычисляют период вращения объекта и угловое положение локальных областей рассеяния в системе координат, связанной с объектом.
Текст
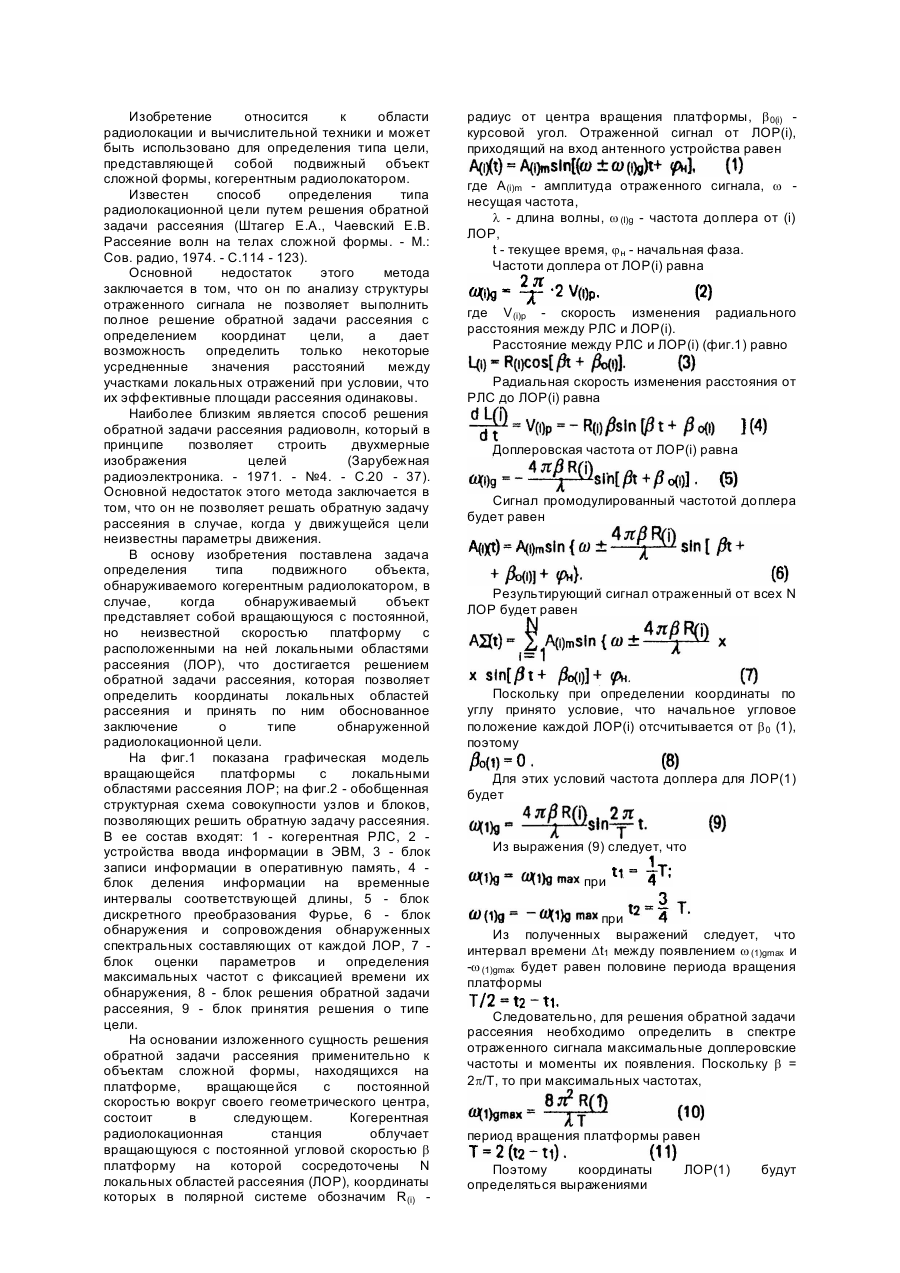
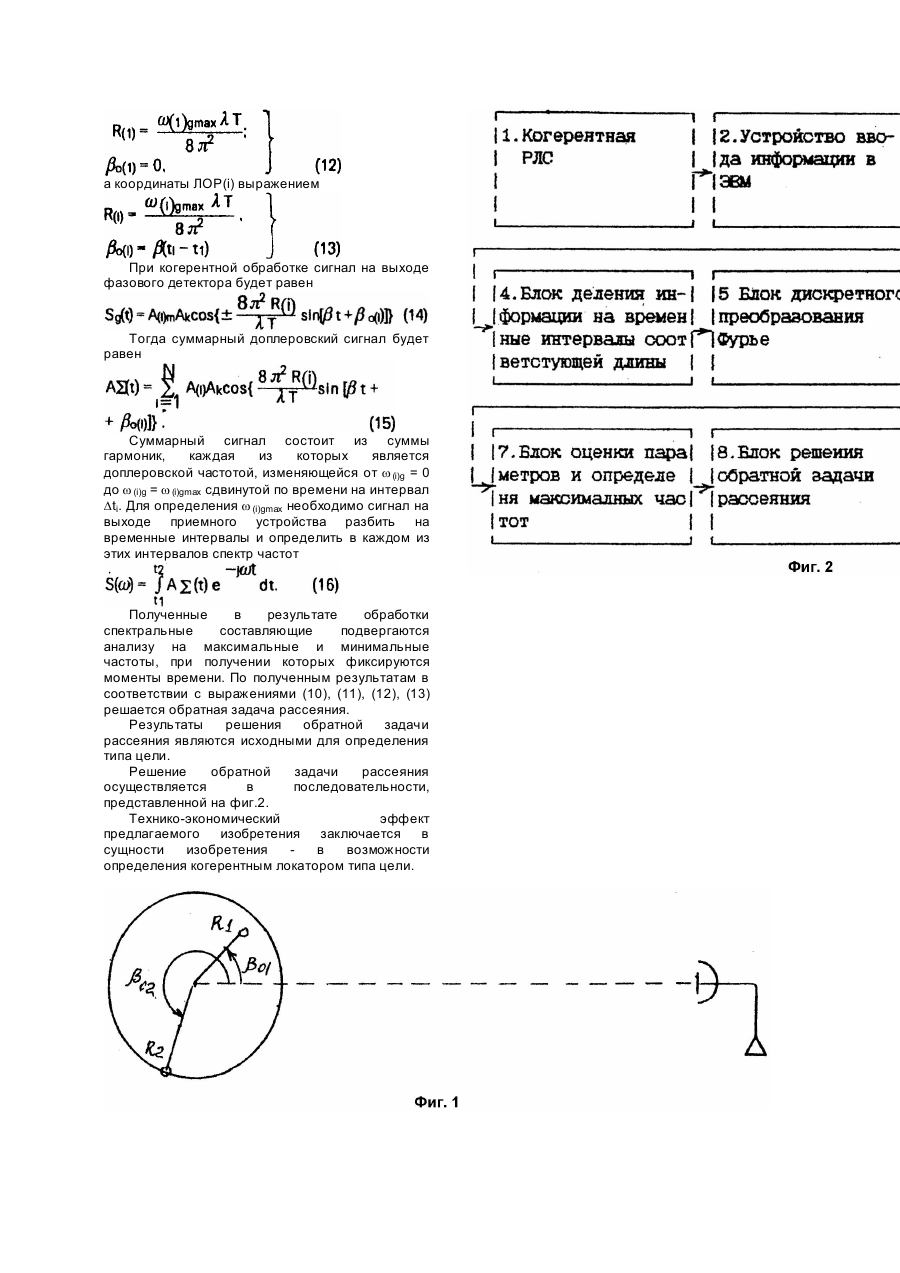
Изобретение относится к области радиолокации и вычислительной техники и может быть использовано для определения типа цели, представляющей собой подвижный объект сложной формы, когерентным радиолокатором. Известен способ определения типа радиолокационной цели путем решения обратной задачи рассеяния (Штагер Е.А., Чаевский Е.В. Рассеяние волн на телах сложной формы. - М.: Сов. радио, 1974. - С.114 - 123). Основной недостаток этого метода заключается в том, что он по анализу структуры отраженного сигнала не позволяет выполнить полное решение обратной задачи рассеяния с определением координат цели, а дает возможность определить только некоторые усредненные значения расстояний между участками локальных отражений при условии, что их эффективные площади рассеяния одинаковы. Наиболее близким является способ решения обратной задачи рассеяния радиоволн, который в принципе позволяет строить двухмерные изображения целей (Зарубежная радиоэлектроника. - 1971. - №4. - С.20 - 37). Основной недостаток этого метода заключается в том, что он не позволяет решать обратную задачу рассеяния в случае, когда у движущейся цели неизвестны параметры движения. В основу изобретения поставлена задача определения типа подвижного объекта, обнаруживаемого когерентным радиолокатором, в случае, когда обнаруживаемый объект представляет собой вращающуюся с постоянной, но неизвестной скоростью платформу с расположенными на ней локальными областями рассеяния (ЛОР), что достигается решением обратной задачи рассеяния, которая позволяет определить координаты локальных областей рассеяния и принять по ним обоснованное заключение о типе обнаруженной радиолокационной цели. На фиг.1 показана графическая модель вращающейся платформы с локальными областями рассеяния ЛОР; на фиг.2 - обобщенная структурная схема совокупности узлов и блоков, позволяющих решить обратную задачу рассеяния. В ее состав входят: 1 - когерентная РЛС, 2 устройства ввода информации в ЭВМ, 3 - блок записи информации в оперативную память, 4 блок деления информации на временные интервалы соответствующей длины, 5 - блок дискретного преобразования Фурье, 6 - блок обнаружения и сопровождения обнаруженных спектральных составляющих от каждой ЛОР, 7 блок оценки параметров и определения максимальных частот с фиксацией времени их обнаружения, 8 - блок решения обратной задачи рассеяния, 9 - блок принятия решения о типе цели. На основании изложенного сущность решения обратной задачи рассеяния применительно к объектам сложной формы, находящихся на платформе, вращающейся с постоянной скоростью вокруг своего геометрического центра, состоит в следующем. Когерентная радиолокационная станция облучает вращающуюся с постоянной угловой скоростью b платформу на которой сосредоточены N локальных областей рассеяния (ЛОР), координаты которых в полярной системе обозначим R(i) радиус от центра вращения платформы, b 0(i) курсовой угол. Отраженной сигнал от ЛОР(i), приходящий на вход антенного устройства равен где A(i)m - амплитуда отраженного сигнала, w несущая частота, l - длина волны, w (I)g - частота доплера от (i) ЛОР, t - текущее время, jн - начальная фаза. Частоти доплера от ЛОР(i) равна где V(i)p - скорость изменения радиального расстояния между РЛС и ЛОР(i). Расстояние между РЛС и ЛОР(i) (фиг.1) равно Радиальная скорость изменения расстояния от РЛС до ЛОР(i) равна Доплеровская частота от ЛОР(i) равна Сигнал промодулированный частотой доплера будет равен Результирующий сигнал отраженный от всех N ЛОР будет равен Поскольку при определении координаты по углу принято условие, что начальное угловое положение каждой ЛОР(i) отсчитывается от b 0 (1), поэтому Для этих условий частота доплера для ЛОР(1) будет Из выражения (9) следует, что при при Из полученных выражений следует, что интервал времени Dt1 между появлением w (1)gmax и -w (1)gmax будет равен половине периода вращения платформы Следовательно, для решения обратной задачи рассеяния необходимо определить в спектре отраженного сигнала максимальные доплеровские частоты и моменты их появления. Поскольку b = 2p/T, то при максимальных частотах, период вращения платформы равен Поэтому координаты определяться выражениями ЛОР(1) будут а координаты ЛОР(i) выражением При когерентной обработке сигнал на выходе фазового детектора будет равен Тогда суммарный доплеровский сигнал будет равен Суммарный сигнал состоит из суммы гармоник, каждая из которых является доплеровской частотой, изменяющейся от w (i)g = 0 до w (i)g = w (i)gmax сдвинутой по времени на интервал Dti. Для определения w (i)gmax необходимо сигнал на выходе приемного устройства разбить на временные интервалы и определить в каждом из этих интервалов спектр частот Полученные в результате обработки спектральные составляющие подвергаются анализу на максимальные и минимальные частоты, при получении которых фиксируются моменты времени. По полученным результатам в соответствии с выражениями (10), (11), (12), (13) решается обратная задача рассеяния. Результаты решения обратной задачи рассеяния являются исходными для определения типа цели. Решение обратной задачи рассеяния осуществляется в последовательности, представленной на фиг.2. Технико-экономический эффект предлагаемого изобретения заключается в сущности изобретения в возможности определения когерентным локатором типа цели.
ДивитисяДодаткова інформація
Автори англійськоюKrasnov Leonid Mykhailovych, Sopin Mykola Pavlovych
Автори російськоюКраснов Леонид Михайлович, Сопин Николай Павлович
МПК / Мітки
МПК: G01R 33/02
Мітки: складної, характеристик, рухомих, об'єктів, електродинамічних, спосіб, форми, аналізу
Код посилання
<a href="https://ua.patents.su/2-24561-sposib-analizu-elektrodinamichnikh-kharakteristik-rukhomikh-obehktiv-skladno-formi.html" target="_blank" rel="follow" title="База патентів України">Спосіб аналізу електродинамічних характеристик рухомих об’єктів складної форми</a>
Засіб відбракування монокристалів корунду складної форми
Номер патенту: 22450
Опубліковано: 03.03.1998
Автори: Добровинська Олена Рувимівна, Піщік Валеріан Володимирович, Гончаренко Тетяна Вікторівна, Литвинов Леонід Аркадійович
МПК: G01N 3/40
Мітки: монокристалів, форми, відбракування, складної, корунду, засіб
Формула / Реферат:
Способ отбраковки монокристаллов корунда сложной формы, включающий механическое воздействие посредством вдавливания алмазной пирамидки, отличающийся тем, что вдавливание осуществляют с величиной нагрузки 105-110 г и контролируют отсутствие микротрещин вокруг отпечатка.
Спосіб обробки поршнів складної форми
Номер патенту: 20364
Опубліковано: 15.07.1997
Автори: Пісарєв Юлій Павлович, Пожидаєв Олександр Валентинович
МПК: B23B 1/00
Мітки: поршнів, складної, спосіб, обробки, форми
Формула / Реферат:
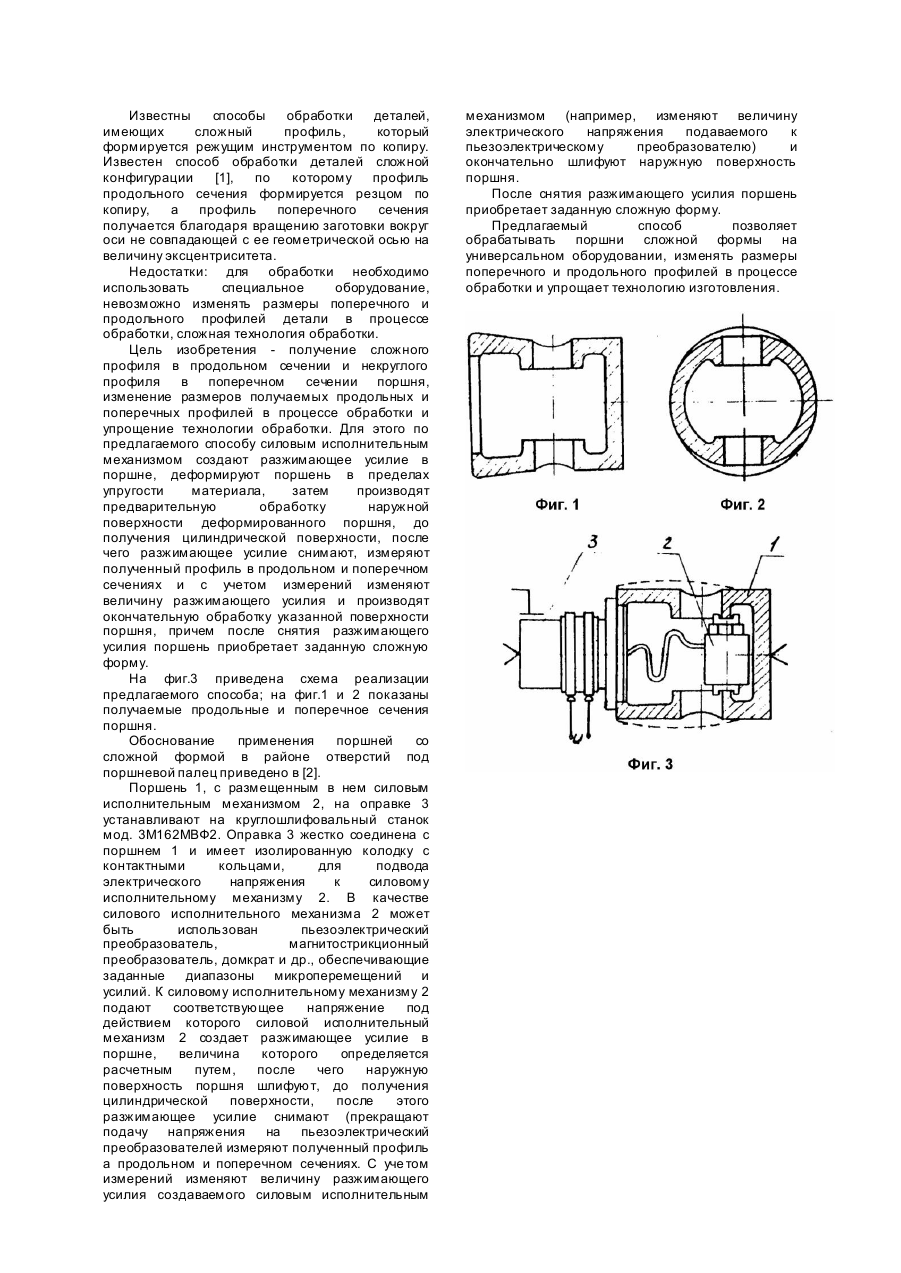
Способ обработки поршней сложной формы для двигателей внутреннего сгорания на универсальном оборудовании, отличающийся тем, что силовым исполнительным механизмом, создающим разжимающее усилие, деформируют поршень в пределах упругости материала, затем производят предварительную обработку наружной поверхности деформированного поршня, до получения цилиндрической поверхности, после чего разжимающее усилие снимают, измеряют полученный профиль...
Пристрій для аналізу форми обгинаючої частотних сигналів
Номер патенту: 10877
Опубліковано: 25.12.1996
Автори: Міхнов Дмитро Кіндратович, Каук Віктор Іванович, Ракогон Аліна Володимирівна
МПК: G01R 29/02
Мітки: пристрій, форми, аналізу, обгинаючої, сигналів, частотних
Формула / Реферат:
Устройство для анализа формы огибающей частотных сигналов, содержащее генератор импульсов, аналого-цифровой преобразователь, первый и сторон регистры, блок сравнения, счетчик адреса считывания и счетчик адреса записи, делитель, коммутатор адресов, запоминающий блок, цифроаналоговый преобразователь, индикаторный блок, дешифратор нуля, первый и второй формирователи импульсов, первый и второй триггеры, первый и второй элементы И, первый и...
Технологічна оснастка для виготовлення виробів складної форми методом безперервного намотування
Номер патенту: 24532
Опубліковано: 21.07.1998
Автори: Калюжний Валерій Вілінович, Малков Ігор Владиславович, Рач Валентин Анатолійович
МПК: B65H 81/00, B29D 23/00
Мітки: методом, виготовлення, намотування, оснастка, форми, технологічна, виробів, безперервного, складної
Формула / Реферат:
Технологическая оснастка для изготовления изделий сложной формы методом непрерывной намотки, включающая держатели и оправку с осями для намотки стеклопластиковых изделий, отличающаяся тем, что держатели оправок выполнены в виде двух плоских прижимных плит, на встречно-направленных сторонах которых выфрезерованы пазы и отверстия, размеры которых и расстояния между которыми соответствуют размерам и местонахождению разнесенных симметричных осей,...
Установка для загартування виробів складної форми
Номер патенту: 14083
Опубліковано: 25.04.1997
Автори: Криворучко Володимир Нестерович, Жуков Петро Олександрович
МПК: C21D 1/09
Мітки: виробів, установка, загартування, форми, складної
Формула / Реферат:
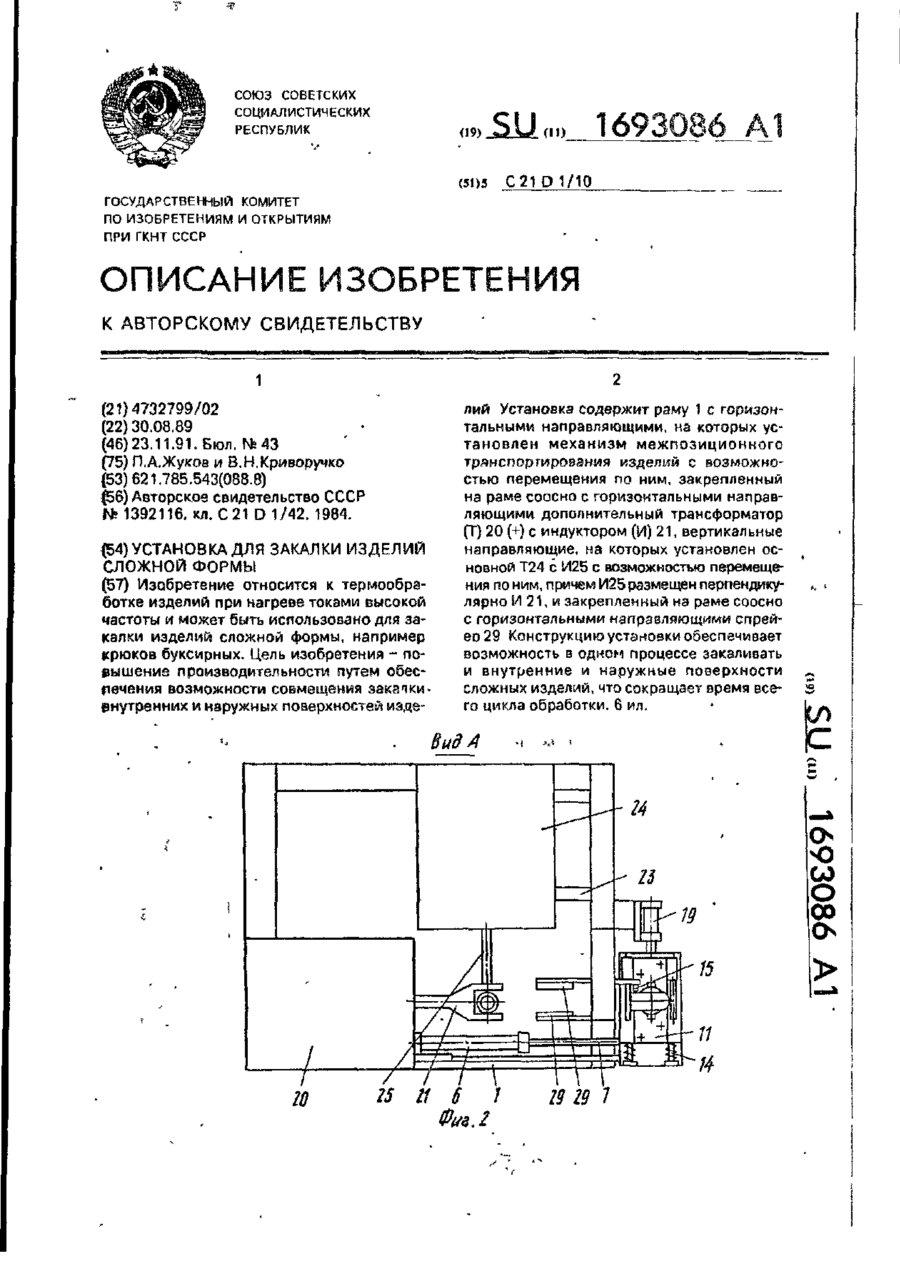
Установка для закалки изделий сложной формы, содержащая раму с горизонтальными направляющими, на которых установлен с возможностью перемещения по ним механизм межпозиционного транспортирования изделий с зажимным приспособлением, вертикальными направляющими, на которых установлен с возможностью перемещения по ним индуктор с трансформатором и закрепленный на рамеспрейер, отличающаяся тем, что, с целью повышения производительности путем...
Попередній патент: Контейнер для зберігання боєприпасів
Наступний патент: Склад для приготування реагенту для обробки бурових розчинів
Випадковий патент: Стабільна готова до застосування композиція парацетамолу для ін'єкцій