Поляризаційний пристрій заглушення завад
Номер патенту: 24090
Опубліковано: 25.06.2007
Автори: ТОМАЧИНСЬКИЙ МИКОЛА ТИМОФІЙОВИЧ, Піза Дмитро Макарович
Формула / Реферат
Поляризаційний пристрій заглушення завад, що містить послідовно з'єднані гостроспрямовану дуально-поляризаційну антену, перший і другий канали прийому, двоканальний комутатор і автокомпенсатор, а також всеспрямовану антену і пеленгаційний пристрій, входи якого підключені до виходів першого і другого каналів прийому, який відрізняється тим, що в нього додатково введені пристрій керування і комутатор каналів, керуючий вхід якого підключений до пристрою синхронізації, сигнальні входи підключені до допоміжної антени і до одного з виходів основної антени, а вихід з'єднаний з входом другого каналу прийому, причому вихід пеленгаційного пристрою підключений до пристрою керування, з'єднаного з керуючим входом двоканального комутатора, при цьому вихід пеленгаційного пристрою і вихід автокомпенсатора є виходами системи.
Текст
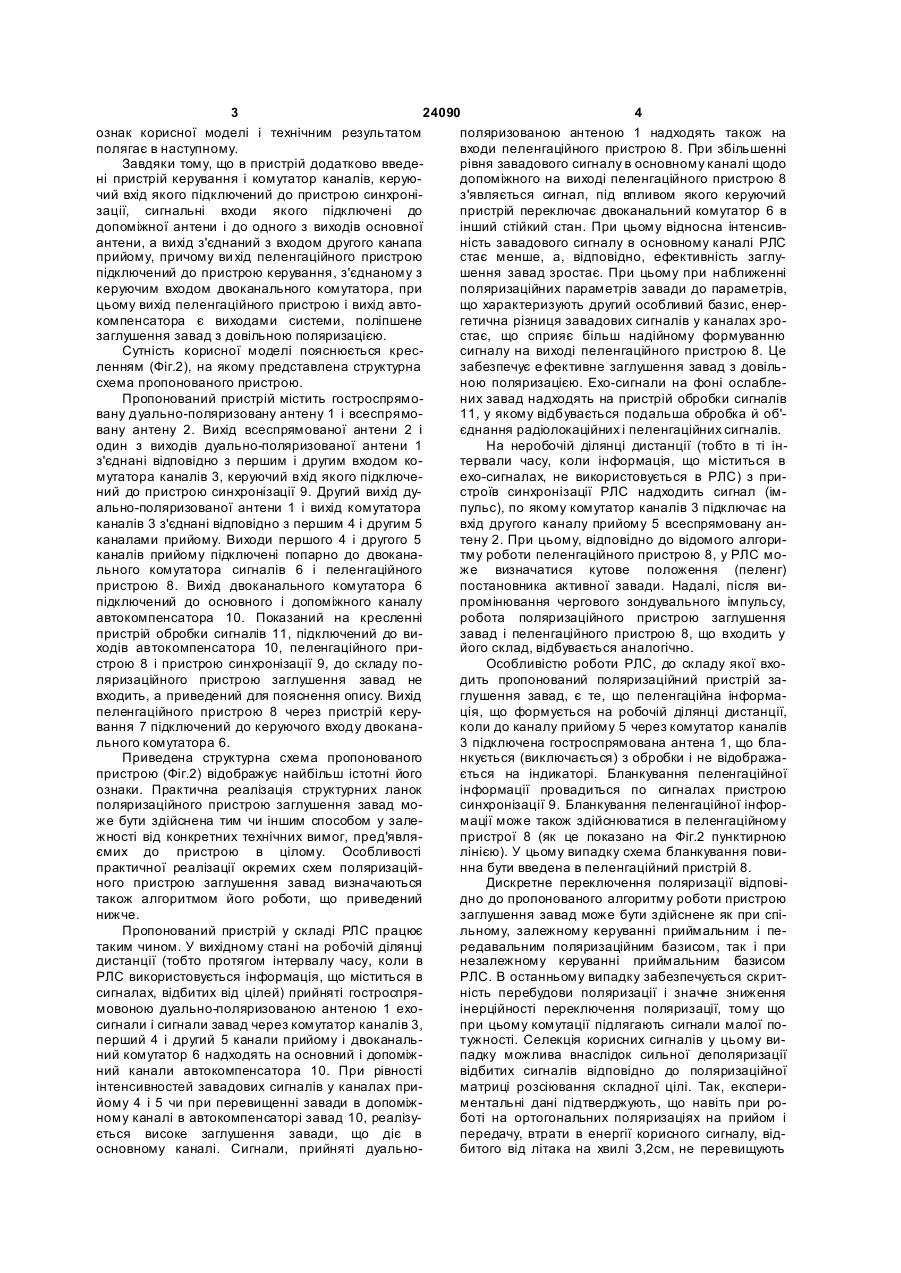
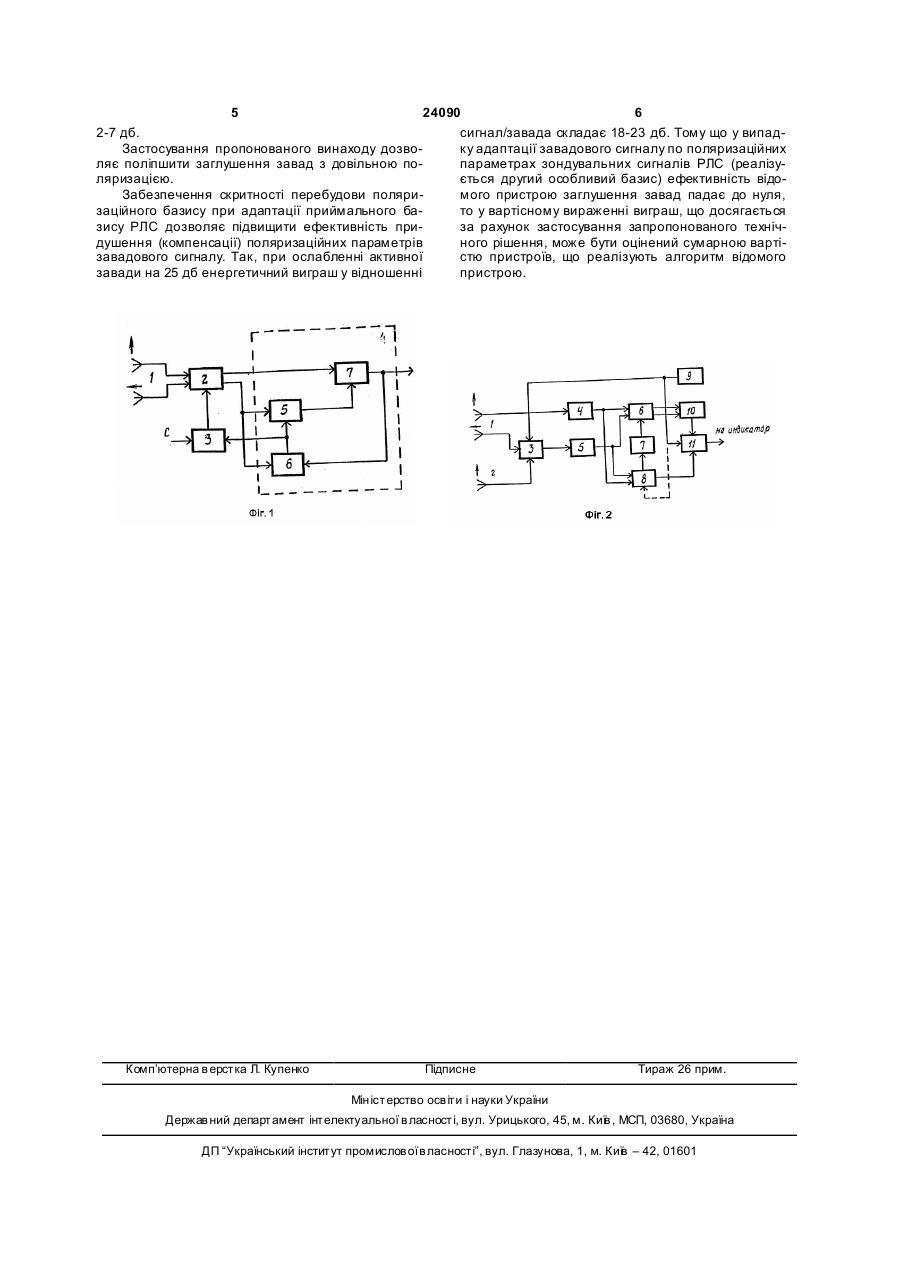
Поляризаційний пристрій заглушення завад, що містить послідовно з'єднані гостроспрямовану дуально-поляризаційну антену, перший і другий канали прийому, двоканальний комутатор і автокомпенсатор, а також всеспрямовану антену і пе 3 24090 4 ознак корисної моделі і технічним результатом поляризованою антеною 1 надходять також на полягає в наступному. входи пеленгаційного пристрою 8. При збільшенні Завдяки тому, що в пристрій додатково введерівня завадового сигналу в основному каналі щодо ні пристрій керування і комутатор каналів, керуюдопоміжного на виході пеленгаційного пристрою 8 чий вхід якого підключений до пристрою синхроніз'являється сигнал, під впливом якого керуючий зації, сигнальні входи якого підключені до пристрій переключає двоканальний комутатор 6 в допоміжної антени і до одного з виходів основної інший стійкий стан. При цьому відносна інтенсивантени, а вихід з'єднаний з входом другого канапа ність завадового сигналу в основному каналі РЛС прийому, причому ви хід пеленгаційного пристрою стає менше, а, відповідно, ефективність заглупідключений до пристрою керування, з'єднаному з шення завад зростає. При цьому при наближенні керуючим входом двоканального комутатора, при поляризаційних параметрів завади до параметрів, цьому вихід пеленгаційного пристрою і вихід автощо характеризують другий особливий базис, енеркомпенсатора є виходами системи, поліпшене гетична різниця завадових сигналів у каналах зрозаглушення завад з довільною поляризацією. стає, що сприяє більш надійному формуванню Сутність корисної моделі пояснюється крессигналу на виході пеленгаційного пристрою 8. Це ленням (Фіг.2), на якому представлена структурна забезпечує е фективне заглушення завад з довільсхема пропонованого пристрою. ною поляризацією. Ехо-сигнали на фоні ослаблеПропонований пристрій містить гостроспрямоних завад надходять на пристрій обробки сигналів вану дуально-поляризовану антену 1 і всеспрямо11, у якому відбувається подальша обробка й об'вану антену 2. Вихід всеспрямованої антени 2 і єднання радіолокаційних і пеленгаційних сигналів. один з виходів дуально-поляризованої антени 1 На неробочій ділянці дистанції (тобто в ті інз'єднані відповідно з першим і другим входом котервали часу, коли інформація, що міститься в мутатора каналів 3, керуючий вхід якого підключеехо-сигналах, не використовується в РЛС) з приний до пристрою синхронізації 9. Другий вихід дустроїв синхронізації РЛС надходить сигнал (імально-поляризованої антени 1 і вихід комутатора пульс), по якому комутатор каналів 3 підключає на каналів 3 з'єднані відповідно з першим 4 і другим 5 вхід другого каналу прийому 5 всеспрямовану анканалами прийому. Виходи першого 4 і другого 5 тену 2. При цьому, відповідно до відомого алгориканалів прийому підключені попарно до двоканатму роботи пеленгаційного пристрою 8, у РЛС мольного комутатора сигналів 6 і пеленгаційного же визначатися кутове положення (пеленг) пристрою 8. Вихід двоканального комутатора 6 постановника активної завади. Надалі, після випідключений до основного і допоміжного каналу промінювання чергового зондувального імпульсу, автокомпенсатора 10. Показаний на кресленні робота поляризаційного пристрою заглушення пристрій обробки сигналів 11, підключений до визавад і пеленгаційного пристрою 8, що входить у ходів автокомпенсатора 10, пеленгаційного прийого склад, відбувається аналогічно. строю 8 і пристрою синхронізації 9, до складу поОсобливістю роботи РЛС, до складу якої вхоляризаційного пристрою заглушення завад не дить пропонований поляризаційний пристрій завходить, а приведений для пояснення опису. Вихід глушення завад, є те, що пеленгаційна інформапеленгаційного пристрою 8 через пристрій керуція, що формується на робочій ділянці дистанції, вання 7 підключений до керуючого входу двоканаколи до каналу прийому 5 через комутатор каналів льного комутатора 6. 3 підключена гостроспрямована антена 1, що блаПриведена структурна схема пропонованого нкується (виключається) з обробки і не відображапристрою (Фіг.2) відображує найбільш істотні його ється на індикаторі. Бланкування пеленгаційної ознаки. Практична реалізація структурних ланок інформації провадиться по сигналах пристрою поляризаційного пристрою заглушення завад мосинхронізації 9. Бланкування пеленгаційної інфорже бути здійснена тим чи іншим способом у залемації може також здійснюватися в пеленгаційному жності від конкретних технічних вимог, пред'являпристрої 8 (як це показано на Фіг.2 пунктирною ємих до пристрою в цілому. Особливості лінією). У цьому випадку схема бланкування повипрактичної реалізації окремих схем поляризаційнна бути введена в пеленгаційний пристрій 8. ного пристрою заглушення завад визначаються Дискретне переключення поляризації відповітакож алгоритмом його роботи, що приведений дно до пропонованого алгоритму роботи пристрою нижче. заглушення завад може бути здійснене як при спіПропонований пристрій у складі РЛС працює льному, залежному керуванні приймальним і петаким чином. У вихідному стані на робочій ділянці редавальним поляризаційним базисом, так і при дистанції (тобто протягом інтервалу часу, коли в незалежному керуванні приймальним базисом РЛС використовується інформація, що міститься в РЛС. В останньому випадку забезпечується скритсигналах, відбитих від цілей) прийняті гостроспряність перебудови поляризації і значне зниження мовоною дуально-поляризованою антеною 1 ехоінерційності переключення поляризації, тому що сигнали і сигнали завад через комутатор каналів 3, при цьому комутації підлягають сигнали малої поперший 4 і другий 5 канали прийому і двоканальтужності. Селекція корисних сигналів у цьому виний комутатор 6 надходять на основний і допоміжпадку можлива внаслідок сильної деполяризації ний канали автокомпенсатора 10. При рівності відбитих сигналів відповідно до поляризаційної інтенсивностей завадових сигналів у каналах приматриці розсіювання складної цілі. Так, експерийому 4 і 5 чи при перевищенні завади в допоміжментальні дані підтверджують, що навіть при роному каналі в автокомпенсаторі завад 10, реалізуботі на ортогональних поляризаціях на прийом і ється високе заглушення завади, що діє в передачу, втрати в енергії корисного сигналу, відосновному каналі. Сигнали, прийняті дуальнобитого від літака на хвилі 3,2см, не перевищують 5 24090 6 2-7 дб. сигнал/завада складає 18-23 дб. Тому що у випадЗастосування пропонованого винаходу дозвоку адаптації завадового сигналу по поляризаційних ляє поліпшити заглушення завад з довільною попараметрах зондувальних сигналів РЛС (реалізуляризацією. ється другий особливий базис) ефективність відоЗабезпечення скритності перебудови поляримого пристрою заглушення завад падає до нуля, заційного базису при адаптації приймального бато у вартісному вираженні виграш, що досягається зису РЛС дозволяє підвищити ефективність приза рахунок застосування запропонованого технічдушення (компенсації) поляризаційних параметрів ного рішення, може бути оцінений сумарною вартізавадового сигналу. Так, при ослабленні активної стю пристроїв, що реалізують алгоритм відомого завади на 25 дб енергетичний виграш у відношенні пристрою. Комп’ютерна в ерстка Л. Купенко Підписне Тираж 26 прим. Міністерство осв іт и і науки України Держав ний департамент інтелектуальної в ласності, вул. Урицького, 45, м. Київ , МСП, 03680, Україна ДП “Український інститут промислов ої в ласності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюPolarized device for suppressing radio interferences
Автори англійськоюPiza Dmytro Makarovych, Tomachynskyi Mykola Tymofiiovych
Назва патенту російськоюПредлагаемое поляризационное устройство для подавления радиопомех
Автори російськоюПиза Дмитрий Макарович, Томачинский Николай Тимофеевич
МПК / Мітки
МПК: G01S 7/36
Мітки: завад, пристрій, заглушення, поляризаційний
Код посилання
<a href="https://ua.patents.su/3-24090-polyarizacijjnijj-pristrijj-zaglushennya-zavad.html" target="_blank" rel="follow" title="База патентів України">Поляризаційний пристрій заглушення завад</a>
Пристрій контролю коефіцієнта заглушення завад
Номер патенту: 24118
Опубліковано: 25.06.2007
Автори: Залевський Олексій Павлович, Піза Дмитро Макарович, Траілін Вячеслав Федорович
МПК: H04B 15/00, G01S 7/40
Мітки: контролю, заглушення, коефіцієнта, пристрій, завад
Формула / Реферат:
Пристрій контролю коефіцієнта заглушення завад, що містить індикатор і з'єднані послідовно комутатор, детектор і інтегратор, який відрізняється тим, що в нього додатково введені лінія затримки і з'єднані послідовно другий комутатор, перший пристрій вибірки і збереження, блок обчислення відношення, другий пристрій вибірки і збереження і блок керування, причому вихід лінії затримки підключений до входу першого комутатора, вихід інтегратора...
Пристрій для захисту від активних завад
Номер патенту: 19475
Опубліковано: 15.12.2006
Автори: Громаковський Володимир Васильович, ТОМАЧИНСЬКИЙ МИКОЛА ТИМОФІЙОВИЧ, Піза Дмитро Макарович
МПК: G01S 1/00
Мітки: активних, захисту, завад, пристрій
Формула / Реферат:
Пристрій для захисту від активних завад, що містить гостронаправлену антену, допоміжну ненаправлену антену, основний і компенсаційний канали прийому, блок автокомпенсатора, перший вхід якого з'єднаний з виходом приймача основного каналу прийому, другий вхід автокомпенсатора з'єднаний через підсилювальний блок з виходом приймача компенсаційного каналу прийому, який відрізняється тим, що в каналах прийому введені блок нормування вхідного...
Пристрій бабурова для заглушення імпульсних завад
Номер патенту: 76428
Опубліковано: 15.08.2006
Автор: Бабуров Едуард Федорович
МПК: H04B 1/62
Мітки: завад, бабурова, пристрій, імпульсних, заглушення
Формула / Реферат:
Пристрій для заглушення імпульсних завад, що містить послідовно сполучені широкосмуговий підсилювач, перший обмежувач і вузькосмуговий підсилювач, який відрізняється тим, що вихід першого обмежувача сполучено з входом вузькосмугового підсилювача через введені послідовно включені передспотворюючий фільтр, другий обмежувач і коректор, причому коректор і передспотворюючий фільтр виконані з взаємооберненими амплітудно-частотними...
Пеленгатор джерел активних завад
Номер патенту: 17265
Опубліковано: 15.09.2006
Автори: Мотиль Володимир Миколайович, Піза Дмитро Макарович
МПК: G01S 3/00
Мітки: завад, джерел, пеленгатор, активних
Формула / Реферат:
Пеленгатор джерел активних завад, що містить послідовно з'єднані спрямовану антену й основний канал прийому, послідовно з'єднані неспрямовану антену і допоміжний канал прийому, а також перший і другий порогові пристрої, з'єднані зі входами схеми порівняння, вихід якої є виходом пеленгатора, при цьому кожен з каналів містить змішувач із загальним для обох каналів гетеродином, підсилювач проміжної частоти (ППЧ), амплітудний детектор і...
Пристрій компенсації активних шумових завад
Номер патенту: 38217
Опубліковано: 15.05.2001
Автори: КОПНОВ МИХАЙЛО ОЛЕКСАНДРОВИЧ, Немчин Олександр Федорович, Каспирович Олександр Геннадійович, КОНОНОВИЧ ВІКТОР ЯКОВИЧ, Мокеєв Юрій Геннадійович, Луханін Михайло Іванович, Попов Олег Якович, Лаврентьєв Володимир Миколайович, Мирошниченко Михайло Іванович
МПК: G01S 7/36
Мітки: шумових, активних, завад, компенсації, пристрій
Формула / Реферат:
1. Пристрій компенсації активних шумових завад, що включає блок обчислення вагових коефіцієнтів, лінію затримки основного каналу, лінію затримки додаткового каналу, блок множення, блок віднімання, причому входи лінії затримки основного каналу і лінії затримки додаткового каналу є входами пристрою вихід лінії затримки додаткового каналу сполучений із першим входом блока множення, вихід якого сполучений із входом блока віднімання, перший вхід...
Попередній патент: Спосіб виміру температури всередині обмоток статорів електричної машини і котушок трансформатора та дроселя
Наступний патент: Імпульсний радіолокатор
Випадковий патент: Спосіб обробки високоміцного чавуну