Імпульсний радіолокатор
Номер патенту: 24135
Опубліковано: 25.06.2007

Формула / Реферат
Імпульсний радіолокатор, що містить послідовно з'єднані дуально-поляризовану антену, антенний перемикач прийом/передача, основний та додатковий канали прийому, пристрій фазової фільтрації з когерентним накопиченням сигналів, автокомпенсатор завад, пристрій обчислення модулів, визначники, пристрій розрахунку координат, пристрій вторинної обробки інформації, індикатор, а також передавач, вихід якого підключений до другого входу антенного перемикача прийом/передача, який відрізняється тим, що в нього додатково введено комутатор, через який підключено додаткові канали прийому до додаткових входів автокомпенсатора, послідовно з'єднані пристрій вибору мінімуму, пристрій порівняння, пристрій формування сигналу керування, вихід якого підключений до керуючих входів атенюаторів, додатково введених до складу основного і додаткового приймальних каналів, сигнальний вхід одного з атенюаторів підключений до виходу антенного перемикача прийом/передача, вхід другого атенюатора з'єднаний з другим виходом дуально-поляризованої антени, а виходи атенюаторів підключені відповідно до входів малошумних підсилювачів основного та додаткового приймального каналу, входи пристрою вибору мінімуму підключені до виходів визначення рівня завадового фону пристрою виявлення.
Текст
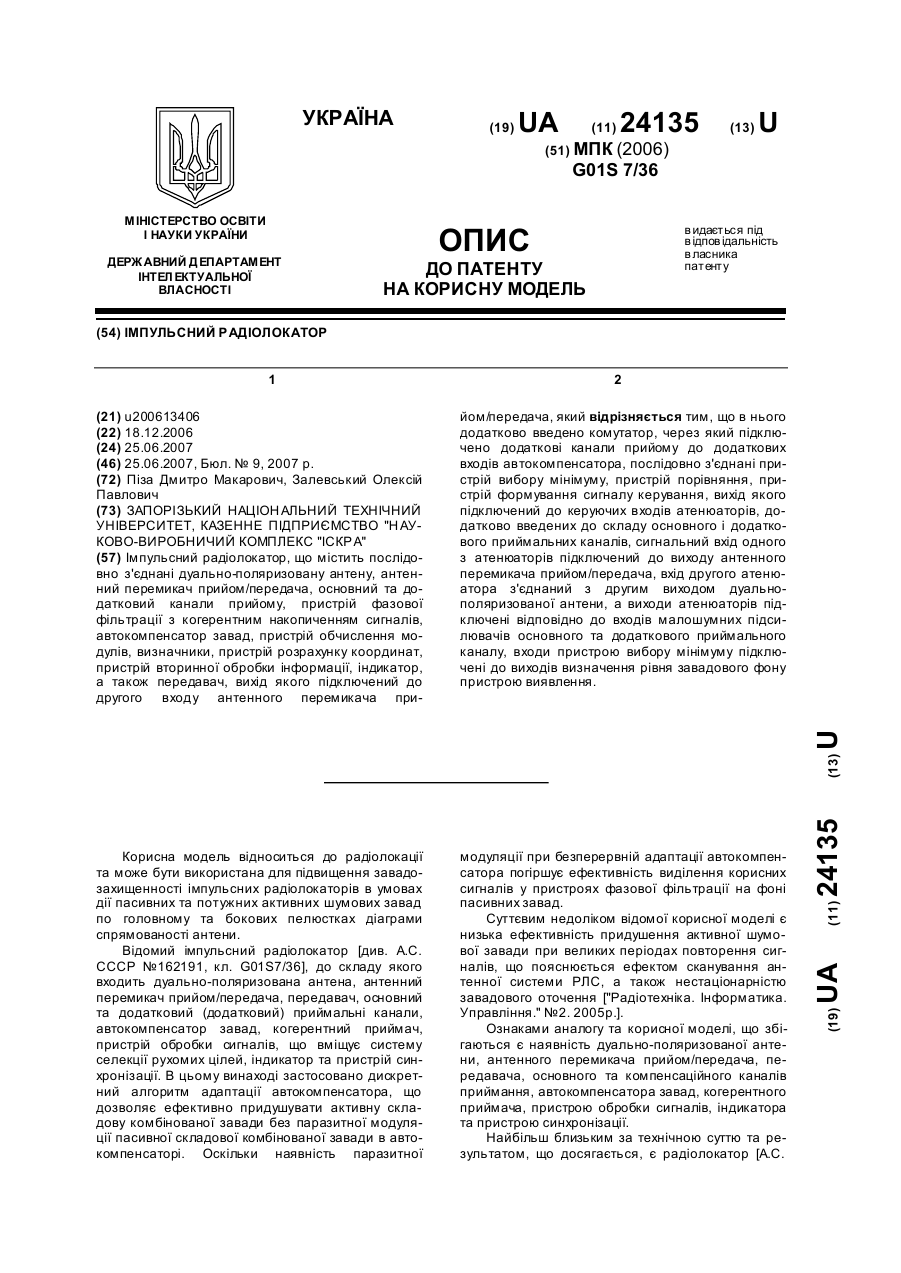
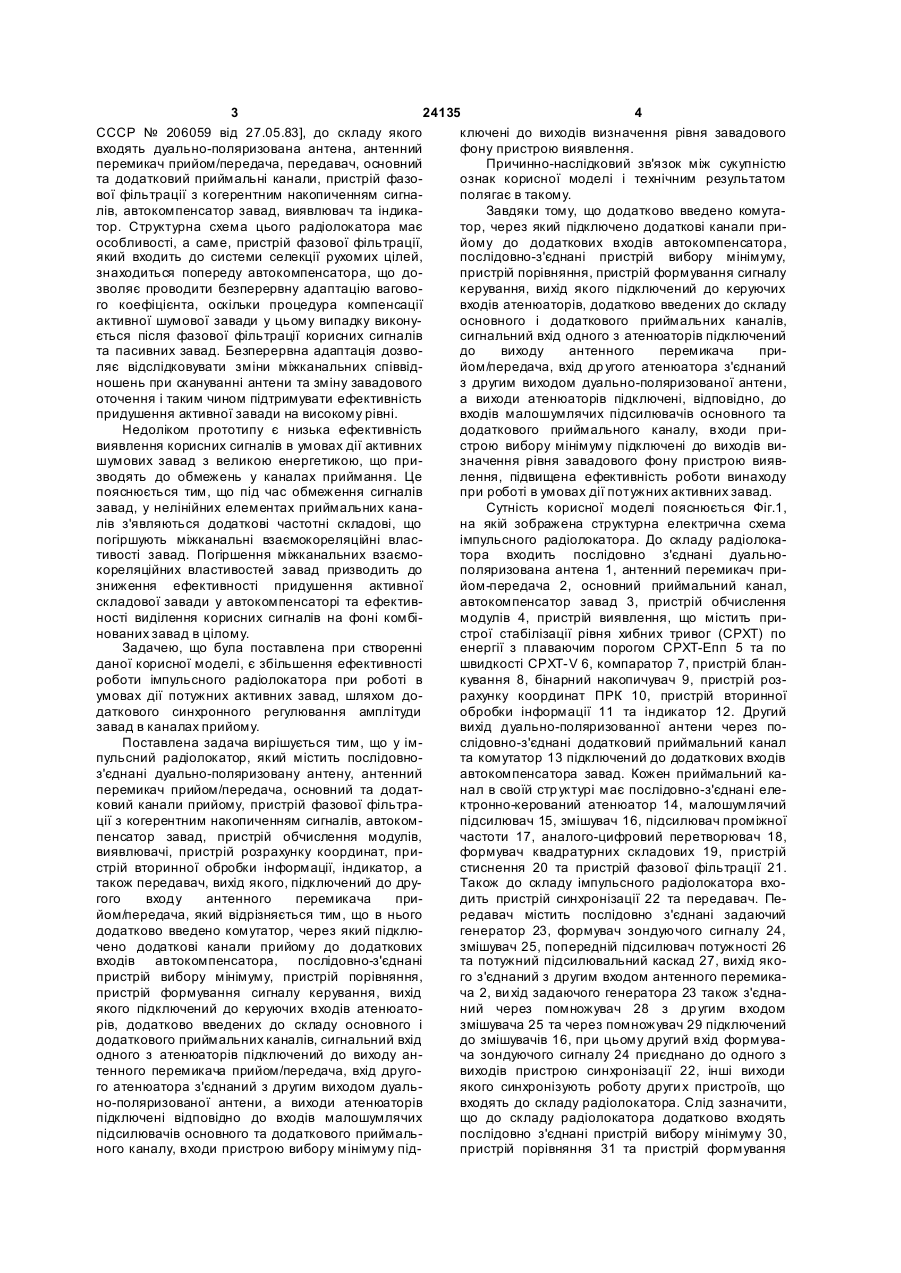
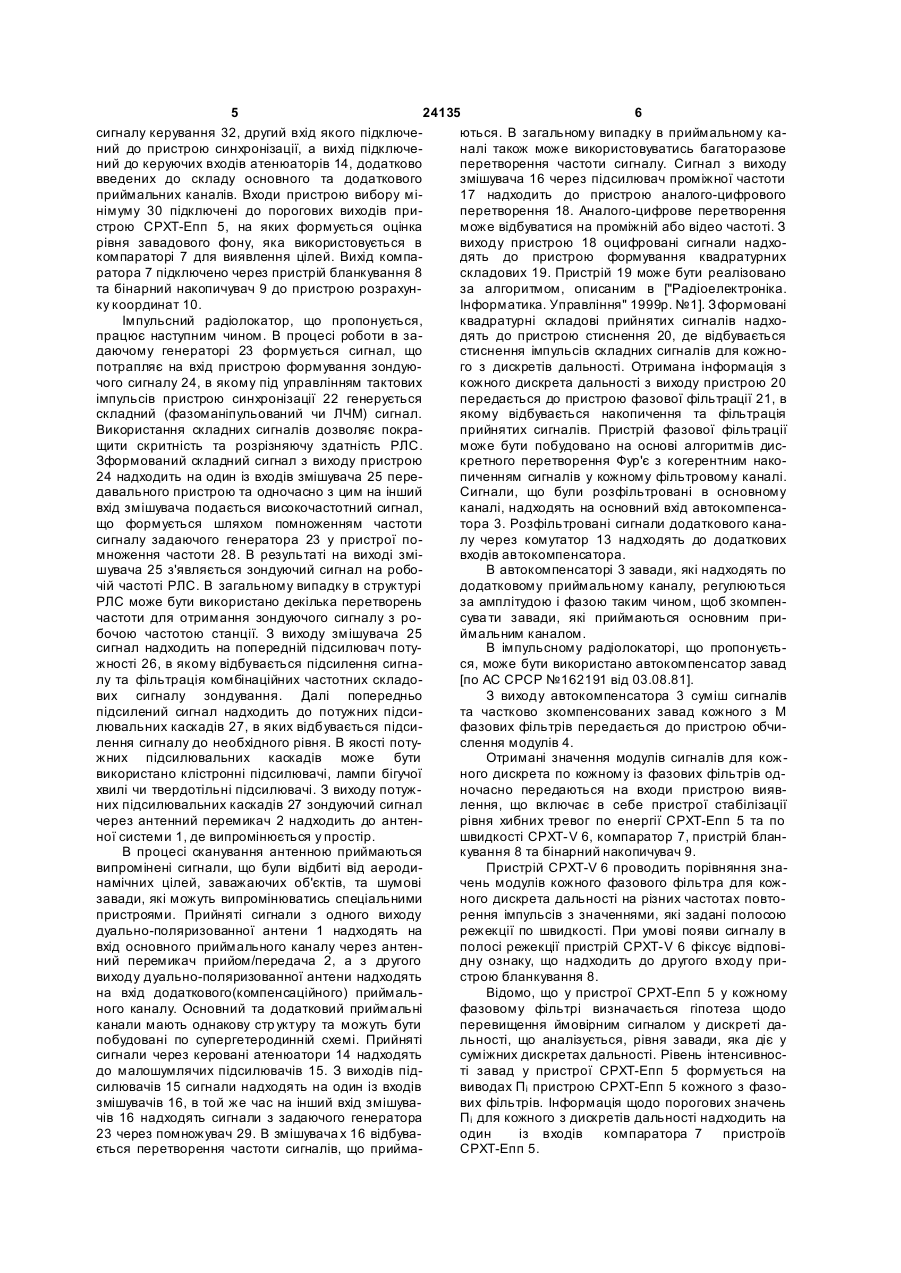
Імпульсний радіолокатор, що містить послідовно з'єднані дуально-поляризовану антену, антенний перемикач прийом/передача, основний та додатковий канали прийому, пристрій фазової фільтрації з когерентним накопиченням сигналів, автокомпенсатор завад, пристрій обчислення модулів, визначники, пристрій розрахунку координат, пристрій вторинної обробки інформації, індикатор, а також передавач, вихід якого підключений до другого входу антенного перемикача при 3 24135 4 СССР № 206059 від 27.05.83], до складу якого ключені до виходів визначення рівня завадового входять дуально-поляризована антена, антенний фону пристрою виявлення. перемикач прийом/передача, передавач, основний Причинно-наслідковий зв'язок між сукупністю та додатковий приймальні канали, пристрій фазоознак корисної моделі і технічним результатом вої фільтрації з когерентним накопиченням сигнаполягає в такому. лів, автокомпенсатор завад, виявлювач та індикаЗавдяки тому, що додатково введено комутатор. Структурна схема цього радіолокатора має тор, через який підключено додаткові канали приособливості, а саме, пристрій фазової фільтрації, йому до додаткових входів автокомпенсатора, який входить до системи селекції рухомих цілей, послідовно-з'єднані пристрій вибору мінімуму, знаходиться попереду автокомпенсатора, що допристрій порівняння, пристрій формування сигналу зволяє проводити безперервну адаптацію ваговокерування, вихід якого підключений до керуючих го коефіцієнта, оскільки процедура компенсації входів атенюаторів, додатково введених до складу активної шумової завади у цьому випадку виконуосновного і додаткового приймальних каналів, ється після фазової фільтрації корисних сигналів сигнальний вхід одного з атенюаторів підключений та пасивних завад. Безперервна адаптація дозводо виходу антенного перемикача приляє відслідковувати зміни міжканальних співвідйом/передача, вхід др угого атенюатора з'єднаний ношень при скануванні антени та зміну завадового з другим виходом дуально-поляризованої антени, оточення і таким чином підтримувати ефективність а виходи атенюаторів підключені, відповідно, до придушення активної завади на високому рівні. входів малошумлячих підсилювачів основного та Недоліком прототипу є низька ефективність додаткового приймального каналу, входи привиявлення корисних сигналів в умовах дії активних строю вибору мінімуму підключені до виходів вишумових завад з великою енергетикою, що призначення рівня завадового фону пристрою виявзводять до обмежень у каналах приймання. Це лення, підвищена ефективність роботи винаходу пояснюється тим, що під час обмеження сигналів при роботі в умовах дії потужних активних завад. завад, у нелінійних елементах приймальних канаСутність корисної моделі пояснюється Фіг.1, лів з'являються додаткові частотні складові, що на якій зображена структурна електрична схема погіршують міжканальні взаємокореляційні власімпульсного радіолокатора. До складу радіолокативості завад. Погіршення міжканальних взаємотора входить послідовно з'єднані дуальнокореляційних властивостей завад призводить до поляризована антена 1, антенний перемикач призниження ефективності придушення активної йом-передача 2, основний приймальний канал, складової завади у автокомпенсаторі та ефективавтокомпенсатор завад 3, пристрій обчислення ності виділення корисних сигналів на фоні комбімодулів 4, пристрій виявлення, що містить принованих завад в цілому. строї стабілізації рівня хибних тривог (СРХТ) по Задачею, що була поставлена при створенні енергії з плаваючим порогом СРХТ-Епп 5 та по даної корисної моделі, є збільшення ефективності швидкості CPXT-V 6, компаратор 7, пристрій бланроботи імпульсного радіолокатора при роботі в кування 8, бінарний накопичувач 9, пристрій розумовах дії потужних активних завад, шляхом дорахунку координат ПРК 10, пристрій вторинної даткового синхронного регулювання амплітуди обробки інформації 11 та індикатор 12. Другий завад в каналах прийому. вихід дуально-поляризованної антени через поПоставлена задача вирішується тим, що у імслідовно-з'єднані додатковий приймальний канал пульсний радіолокатор, який містить послідовнота комутатор 13 підключений до додаткових входів з'єднані дуально-поляризовану антену, антенний автокомпенсатора завад. Кожен приймальний каперемикач прийом/передача, основний та додатнал в своїй стр уктурі має послідовно-з'єднані елековий канали прийому, пристрій фазової фільтрактронно-керований атенюатор 14, малошумлячий ції з когерентним накопиченням сигналів, автокомпідсилювач 15, змішувач 16, підсилювач проміжної пенсатор завад, пристрій обчислення модулів, частоти 17, аналого-цифровий перетворювач 18, виявлювачі, пристрій розрахунку координат, приформувач квадратурних складових 19, пристрій стрій вторинної обробки інформації, індикатор, а стиснення 20 та пристрій фазової фільтрації 21. також передавач, вихід якого, підключений до друТакож до складу імпульсного радіолокатора вхогого входу антенного перемикача придить пристрій синхронізації 22 та передавач. Пейом/передача, який відрізняється тим, що в нього редавач містить послідовно з'єднані задаючий додатково введено комутатор, через який підклюгенератор 23, формувач зондуючого сигналу 24, чено додаткові канали прийому до додаткових змішувач 25, попередній підсилювач потужності 26 входів автокомпенсатора, послідовно-з'єднані та потужний підсилювальний каскад 27, вихід якопристрій вибору мінімуму, пристрій порівняння, го з'єднаний з другим входом антенного перемикапристрій формування сигналу керування, вихід ча 2, ви хід задаючого генератора 23 також з'єднаякого підключений до керуючих входів атенюатоний через помножувач 28 з др угим входом рів, додатково введених до складу основного і змішувача 25 та через помножувач 29 підключений додаткового приймальних каналів, сигнальний вхід до змішувачів 16, при цьому другий вхід формуваодного з атенюаторів підключений до виходу анча зондуючого сигналу 24 приєднано до одного з тенного перемикача прийом/передача, вхід друговиходів пристрою синхронізації 22, інші виходи го атенюатора з'єднаний з другим виходом дуальякого синхронізують роботу други х пристроїв, що но-поляризованої антени, а виходи атенюаторів входять до складу радіолокатора. Слід зазначити, підключені відповідно до входів малошумлячих що до складу радіолокатора додатково входять підсилювачів основного та додаткового приймальпослідовно з'єднані пристрій вибору мінімуму 30, ного каналу, входи пристрою вибору мінімуму підпристрій порівняння 31 та пристрій формування 5 24135 6 сигналу керування 32, другий вхід якого підключеються. В загальному випадку в приймальному каний до пристрою синхронізації, а вихід підключеналі також може використовуватись багаторазове ний до керуючих входів атенюаторів 14, додатково перетворення частоти сигналу. Сигнал з виходу введених до складу основного та додаткового змішувача 16 через підсилювач проміжної частоти приймальних каналів. Входи пристрою вибору мі17 надходить до пристрою аналого-цифрового німуму 30 підключені до порогових виходів приперетворення 18. Аналого-цифрове перетворення строю СРХТ-Епп 5, на яких формується оцінка може відбуватися на проміжній або відео частоті. З рівня завадового фону, яка використовується в виходу пристрою 18 оцифровані сигнали надхокомпараторі 7 для виявлення цілей. Вихід компадять до пристрою формування квадратурних ратора 7 підключено через пристрій бланкування 8 складових 19. Пристрій 19 може бути реалізовано та бінарний накопичувач 9 до пристрою розрахунза алгоритмом, описаним в ["Радіоелектроніка. ку координат 10. Інформатика. Управління" 1999р. №1]. Зформовані Імпульсний радіолокатор, що пропонується, квадратурні складові прийнятих сигналів надхопрацює наступним чином. В процесі роботи в задять до пристрою стиснення 20, де відбувається даючому генераторі 23 формується сигнал, що стиснення імпульсів складних сигналів для кожнопотрапляє на вхід пристрою формування зондуюго з дискретів дальності. Отримана інформація з чого сигналу 24, в якому під управлінням тактових кожного дискрета дальності з виходу пристрою 20 імпульсів пристрою синхронізації 22 генерується передається до пристрою фазової фільтрації 21, в складний (фазоманіпульований чи ЛЧМ) сигнал. якому відбувається накопичення та фільтрація Використання складних сигналів дозволяє покраприйнятих сигналів. Пристрій фазової фільтрації щити скритність та розрізняючу здатність РЛС. може бути побудовано на основі алгоритмів дисЗформований складний сигнал з виходу пристрою кретного перетворення Фур'є з когерентним нако24 надходить на один із входів змішувача 25 перепиченням сигналів у кожному фільтровому каналі. давального пристрою та одночасно з цим на інший Сигнали, що були розфільтровані в основному вхід змішувача подається високочастотний сигнал, каналі, надходять на основний вхід автокомпенсащо формується шляхом помноженням частоти тора 3. Розфільтровані сигнали додаткового канасигналу задаючого генератора 23 у пристрої полу через комутатор 13 надходять до додаткових множення частоти 28. В результаті на виході змівходів автокомпенсатора. шувача 25 з'являється зондуючий сигнал на робоВ автокомпенсаторі 3 завади, які надходять по чій частоті РЛС. В загальному випадку в структурі додатковому приймальному каналу, регулюються РЛС може бути використано декілька перетворень за амплітудою і фазою таким чином, щоб зкомпенчастоти для отримання зондуючого сигналу з росува ти завади, які приймаються основним прибочою частотою станції. З виходу змішувача 25 ймальним каналом. сигнал надходить на попередній підсилювач потуВ імпульсному радіолокаторі, що пропонуєтьжності 26, в якому відбувається підсилення сигнася, може бути використано автокомпенсатор завад лу та фільтрація комбінаційних частотних складо[по АС СРСР №162191 від 03.08.81]. вих сигналу зондування. Далі попередньо З виходу автокомпенсатора 3 суміш сигналів підсилений сигнал надходить до потужних підсита частково зкомпенсованих завад кожного з М лювальних каскадів 27, в яких відбувається підсифазових фільтрів передається до пристрою обчилення сигналу до необхідного рівня. В якості потуслення модулів 4. жних підсилювальних каскадів може бути Отримані значення модулів сигналів для кож використано клістронні підсилювачі, лампи бігучої ного дискрета по кожному із фазових фільтрів одхвилі чи твердотільні підсилювачі. З виходу потужночасно передаються на входи пристрою виявних підсилювальних каскадів 27 зондуючий сигнал лення, що включає в себе пристрої стабілізації через антенний перемикач 2 надходить до антенрівня хибних тревог по енергії СРХТ-Епп 5 та по ної системи 1, де випромінюється у простір. швидкості CPXT-V 6, компаратор 7, пристрій бланВ процесі сканування антенною приймаються кування 8 та бінарний накопичувач 9. випромінені сигнали, що були відбиті від аеродиПристрій CPXT-V 6 проводить порівняння знанамічних цілей, заважаючих об'єктів, та шумові чень модулів кожного фазового фільтра для кожзавади, які можуть випромінюватись спеціальними ного дискрета дальності на різних частотах повтопристроями. Прийняті сигнали з одного виходу рення імпульсів з значеннями, які задані полосою дуально-поляризованної антени 1 надходять на режекції по швидкості. При умові появи сигналу в вхід основного приймального каналу через антенполосі режекції пристрій CPXT-V 6 фіксує відповіний перемикач прийом/передача 2, а з другого дну ознаку, що надходить до другого входу привиходу дуально-поляризованної антени надходять строю бланкування 8. на вхід додаткового(компенсаційного) приймальВідомо, що у пристрої СРХТ-Епп 5 у кожному ного каналу. Основний та додатковий приймальні фазовому фільтрі визначається гіпотеза щодо канали мають однакову стр уктуру та можуть бути перевищення ймовірним сигналом у дискреті дапобудовані по супергетеродинній схемі. Прийняті льності, що аналізується, рівня завади, яка діє у сигнали через керовані атенюатори 14 надходять суміжних дискретах дальності. Рівень інтенсивносдо малошумлячих підсилювачів 15. З виходів підті завад у пристрої СРХТ-Епп 5 формується на силювачів 15 сигнали надходять на один із входів виводах П i пристрою СРХТ-Епп 5 кожного з фазозмішувачів 16, в той же час на інший вхід змішувавих фільтрів. Інформація щодо порогових значень чів 16 надходять сигнали з задаючого генератора П i для кожного з дискретів дальності надходить на 23 через помножувач 29. В змішувача х 16 відбуваодин із входів компаратора 7 пристроїв ється перетворення частоти сигналів, що приймаСРХТ-Епп 5. 7 24135 8 З виходів пристроїв СРХТ-Епп 5, CPXT-V 6 всі атенюаторів 14. В результаті цього відбувається ознаки перевищення над пороговими значеннями синхронне послаблення сигналів в основному та для кожного з дискретів дальності та кожного фадодатковому каналах. Таким чином в приймальних зового фільтра надходять через пристрій бланкуканалах'сигнали завад не обмежуються та їх взаєвання 8 на бінарний накопичувач 9, де відбуваєтьмні кореляційні характеристики залишаються вися міжпачкова обробка та прийняття рішення щодо сокими, що забезпечує ефективне придушення наявності або відсутності цілі. При цьому, якщо активних завад з великою енергетикою. Синхросигнал, що приймається, знаходиться у полосі нне послаблення завадових сигналів на вході прирежекції пристрою CPXT-V 6 або не перевищує ймальних каналів дозволяє зберегти міжканальні поріг виявлення в компараторі 7, який формується співвідношення, що не потребує додаткового репристроєм СРХТ-Епп 5, то він на подальшу обробгулювання вагових коефіцієнтів в автокомпенсатоку не надходить. В пристрої 10 відбувається розрі 3 після нормування сигналів в каналах. рахунок швидкості та координат цілей на базі інЯкщо рівень завад Umin не перевищує порогоформації, отриманої з пристроїв виявлення. З вого значення Апоріг, то з виходу пристрою поріввиходу пристрою 10 інформація передається до няння 31 на вхід пристрою керування 32 надхопристрою вторинної обробки інформації 11, де дить нульове значення. При цьому на керуючому відбувається трасова обробка інформації з настувиході пристрою керування 32 встановлюється пним відображенням радіолокаційної обстановки цифровий код, що відповідає встановленню мініна індикаторі РЛС. мального значення послаблення в атенюатоОцінка інтенсивності завад, яка виконується в рах 14. СРХТ-Епп 5, використовується для регулювання Період оновлення величини послаблення у параметрів приймальних каналів для забезпеченатенюаторах за рахунок використання тактових ня ефективності придушення активних шумових сигналів з пристрою синхронізації, можна обирати завад з високою енергетикою. В режимі регулютаким, що дорівнює довжині частотної пачки (див. вання комутатор 13 відключає додатковий приФіг.2). Для цього у кінці кожного періода повторенймальний канал від додаткових входів автокомпеня імпульсів передбачається інтервал для формунсатора 3 в кінці кожного періода повторення вання сигналу керування. При такому варіанті рекожної частотної пачки. Сигнал керування, що гулювання атенюаторів може виконуватися у кінці надходить на комутатор 13 з пристрою синхроніостанього періода частотної пачки у відповідності з зації 22, зображено на фіг.2. При цьому у пристронаведеною на фіг. 2 часовою діаграмою. ях СРХТ-Епп 5 на виводах Пi кожного із фазових У межах запропонованої структурної схеми фільтрів формується оцінка інтенсивності завад, можна забезпечити режим адаптації параметрів які діють на основний приймальний канал радіолоприймальних трактів з компенсацією шумових закатора. Виводи П i пристроїв СРХТ-Епп, що відповад у кожній частотній пачці. відають фазовим фільтрам з номерами 0,1 та М-1, Ефективність запропонованого технічного ріне використовуються для регулювання параметрів шення визначається спроможністю радара придуприймальних каналів. Це забезпечує зменшення шувати активні шумові завади з великою енергевпливу потужних пасивних завад на формування тикою. Враховуючи обмежений динамічний керуючого сигналу атенюаторів 14. Оцінка інтендіапазон радіоприймальних каналів, застосування сивності завад, сформована на інших входах запропонованого технічного рішення в умовах дії СРХТ-Епп 6, подається на пристрій вибору мінімуінтенсивних активних завад спроможне забезпечиму 30. ти збільшення динамічного діапазону ефективно В режимі регулювання по сигналу керування, компенсованих завад на величину, що визначаякий надходить з пристрою синхронізації 22, приється діапазоном зміни ослаблення в синхронно стрій вибору мінімуму 30 обирає мінімальне знакерованих атенюаторах. Наприклад, в РЛС 36Д6, чення рівня завад Umin серед всіх підключених фаяка поставляється Україною у різні країни Європи, зових фільтрів по кожному з дискретів дальності. Азії, Африки та Америки, збільшення динамічного Вибір мінімального значення Umin зменшує ймовідіапазону ефективно компенсованих завад може рність формування сигнала керування атенюатоскладати 20дБ. Це підтверджується експерименрів 14, викликаного присутністю потужних пасивтальними результатами, що наведені на Фіг.3, на них завад та сигналів, відбитих від якій заштрихованою областю показано виграш в аеродинамічних об'єктів. Отримане мінімальне придушенні активних шумових завад при застосузначення Umin в пристрої порівняння 31 порівнюванні запропонованого рішення. Дійсно, на Фіг.3. в ється з пороговим значенням Апоріг. При умові пекоординатах коефіцієнт придушення активної шуревищення порогового значення Апоріг, при якому мової завади Кп та рівень завади в основному наступає обмеження в основному приймальному приймальному каналі відносно його власних шумів каналі, на пристрій формування керуючого сигналу sз/sвш показано, що виграш запропонованого рі32 передається значення Umin. Пристрій 32 формує шення складає приблизно 20дБ. цифровий код, який надходить до керуючих входів 9 Комп’ютерна в ерстка Н. Лисенко 24135 Підписне 10 Тираж 26 прим. Міністерство осв іт и і науки України Держав ний департамент інтелектуальної в ласності, вул. Урицького, 45, м. Київ , МСП, 03680, Україна ДП “Український інститут промислов ої в ласності”,вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюPulse radar
Автори англійськоюPiza Dmytro Makarovych, Zalevskyi Oleksii Pavlovych
Назва патенту російськоюИмпульсный радиолокатор
Автори російськоюПиза Дмитрий Макарович, Залевский Алексей Павлович
МПК / Мітки
МПК: G01S 7/36
Мітки: радіолокатор, імпульсний
Код посилання
<a href="https://ua.patents.su/5-24135-impulsnijj-radiolokator.html" target="_blank" rel="follow" title="База патентів України">Імпульсний радіолокатор</a>
Імпульсний радіолокатор

Номер патенту: 44107
Опубліковано: 15.12.2004
Автори: Піза Дмитро Макарович, Пресняк Ігор Степанович, ТОМАЧИНСЬКИЙ МИКОЛА ТИМОФІЙОВИЧ
МПК: G01S 7/36
Мітки: імпульсний, радіолокатор
Формула / Реферат:
Імпульсний радіолокатор, що містить послідовно з'єднані дуальнополяризовану антену, перемикач прийом/передача, основний канал прийому, автокомпенсатор завад, когерентний приймач, пристрій для обробки сигналів, індикатор, синхронізатор, передавач, вихід якого з'єднаний із входом перемикача прийом/передача, який відрізняється тим, що в нього, введені послідовно з'єднані режекторний фільтр, підсилювач, детектор, інтегратор, формувач керуючого...
Імпульсний радіолокатор

Номер патенту: 46936
Опубліковано: 17.06.2002
Автори: Бахвалов Валентин Борисович, Кудрик Андрій Миколайович, Пророшин Сергій Михайлович
МПК: G01S 7/36
Мітки: радіолокатор, імпульсний
Формула / Реферат:
Імпульсний радіолокатор, що містить імпульсний передавач, приймально-передавальну дзеркальну антену з рупорним опромінювачем, антенний перемикач у вигляді газового розрядника, приймач і індикатор, який відрізняється тим, що опромінювач антени виконаний у вигляді конічного рупора з круглим хвилеводом, в якому встановлені вертикальний пов'язаний з передавачем передавальний штир, газовий розрядник антенного перемикача та вертикальний і...
Двокоординатний імпульсний радіолокатор
Номер патенту: 32200
Опубліковано: 15.12.2000
Автори: Пророшин Сергій Михайлович, Кудрик Андрій Миколайович, Бахвалов Валентин Борисович
МПК: G01S 17/00
Мітки: радіолокатор, двокоординатний, імпульсний
Текст:
...антену у вигляді вібраторної антени типу «хвильовий» канал з нерухомим активним симетричним напівхвильовим вібратором і обертальними по азимуту директорами і рефлектором. Це дозволяє виконати фідерну лінію у вигляді нерухомої коаксиальної фідерної лінії, що пов'язує активний вібратор антени з антенним перемикачем, і виключити з цієї лінії обертальне зчленування. Відсутність обертального зчленування дозволяє збільшити пікову потужність...
Радіолокатор
Номер патенту: 42178
Опубліковано: 15.08.2003
Автори: Піза Дмитро Макарович, Мокеєв Юрій Геннадійович, Немчин Олександр Федорович
МПК: G01S 7/36, G01S 13/00, G01S 13/42
Мітки: радіолокатор
Формула / Реферат:
1. Радіолокатор, що містить послідовно з’єднані дуально-поляризовану антену, перемикач прийом/передача, перший канал приймання, пристрій компенсації завад, індикатор та передавач, а також другий канал приймання, підключений до другого виходу антени, який відрізняється тим, що він додатково має когерентний приймач, синхронізатор та послідовно з’єднані перший логарифмічний підсилювач, перший детектор, перший інтегратор, суматор,...
Радіолокатор з пристроєм компенсації завад відніманням
Номер патенту: 32194
Опубліковано: 15.12.2000
Автори: Кудрик Андрій Миколайович, Пророшин Сергій Михайлович, Бахвалов Валентин Борисович
МПК: G01S 7/36
Мітки: завад, радіолокатор, відніманням, компенсації, пристроєм
Текст:
...(в тому числі і кругової) поляризації навіть за відсутністю просторових і часових відмінностей завади і сигналу. Поставлена задача вирішується тим, що в радіолокаторі з пристроєм компенсації завад відніманням, що містить антенну систему, антенний перемикач і пов'язаний з ним передавач імпульсного сигналу, приймач сигналу, пристрій віднімання та індикатор, згідно з винаходом антенна система виконана у вигляді рупорно-параболічної антени з...
Попередній патент: Поляризаційний пристрій заглушення завад
Наступний патент: Спосіб підтримування аменореї у жінки, яка зазнає постійного введення прогестину
Випадковий патент: Спосіб приготування овочевого салату по-домашньому