Пристрій контролю коефіцієнта заглушення завад
Номер патенту: 24118
Опубліковано: 25.06.2007
Автори: Залевський Олексій Павлович, Піза Дмитро Макарович, Траілін Вячеслав Федорович

Формула / Реферат
Пристрій контролю коефіцієнта заглушення завад, що містить індикатор і з'єднані послідовно комутатор, детектор і інтегратор, який відрізняється тим, що в нього додатково введені лінія затримки і з'єднані послідовно другий комутатор, перший пристрій вибірки і збереження, блок обчислення відношення, другий пристрій вибірки і збереження і блок керування, причому вихід лінії затримки підключений до входу першого комутатора, вихід інтегратора з'єднаний з входом другого комутатора, другий вихід якого з'єднаний з другим входом блока обчислення відношення, вихід другого пристрою вибірки і збереження підключений до індикатора, перший керуючий вхід інтегратора підключений до першого виходу блока керування, другий вихід якого з'єднаний з керуючими входами комутаторів і першого пристрою вибірки і збереження, а третій вихід підключений до керуючого входу другого пристрою вибірки і збереження, при цьому вхід синхронізації пристрою підключений до першого входу блока керування, вхід тактових імпульсів підключений до керуючого входу лінії затримки, других входів інтегратора і блока керування, а інформаційними входами пристрою є вхід лінії затримки і другий вхід першого комутатора; у свою чергу, блок керування містить перший і другий лічильники, схему І-НІ, інвертор, тригер і схему АБО-НІ, причому об'єднані встановлювальні входи лічильників з'єднані з входом інвертора і підключені до входу синхронізації блока керування, до входу тактових імпульсів підключений рахунковий вхід першого лічильника й один із входів схеми І-НІ, до інших входів якої підключені виходи першого лічильника, а вихід схеми І-НІ є першим виходом блока керування і з'єднаний з рахунковим входом другого лічильника, вихід якого є другим виходом блока керування й одним із входів схеми АБО-НІ, вихід якої є третім виходом блока керування і підключений до входу синхронізації тригера, Д-вхід якого підключений до корпусу, вхід установки одиниці підключений до виходу інвертора, а інверсний вихід підключений до іншого входу схеми АБО-НІ.
Текст
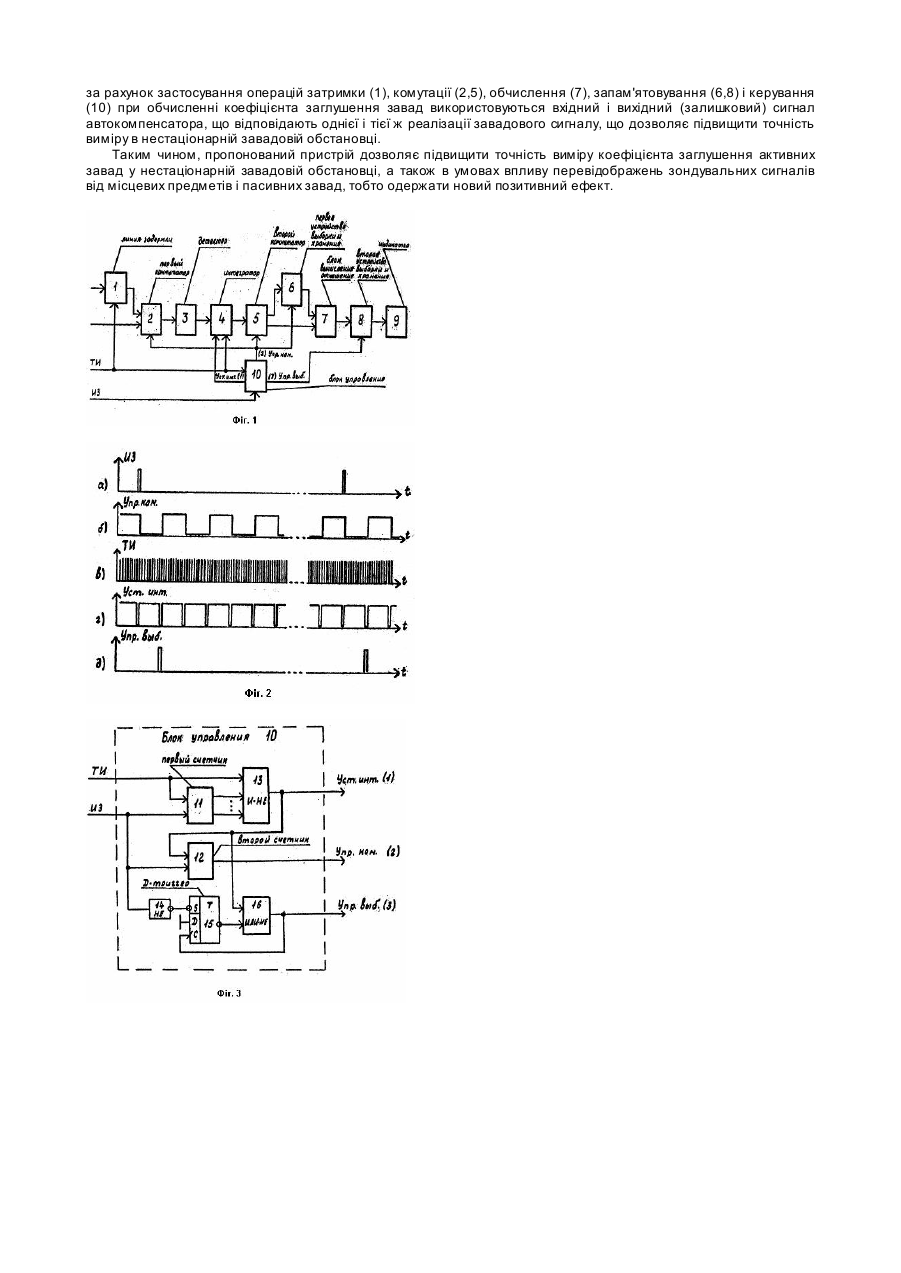
Корисна модель відноситься до області радіолокації і може бути використана для контролю коефіцієнта заглушення завад, наприклад, в автокомпенсаторах активних завад. В існуючих пристроях завадозахисту (те хнічний опис виробу 35Д6 (КП НВК «Іскра»)) вимір коефіцієнта заглушення завад здійснюється шляхом відключення допоміжного каналу і виміру рівня завади на виході автокомпенсатора, а потім аналогічного виміру після підключення, тобто в одній і тій же точці схеми. Недоліком такого варіанта побудови вимірювача коефіцієнта заглушення завад є те, що при відключеному допоміжному каналі порушується процес компенсації завади, що веде до значного погіршення спостережуваності радіолокаційних цілей, отже, цей спосіб непридатний в бойових умовах роботи РЛС. Найбільш близьким по технічній сутності є пристрій виміру величини коефіцієнта заглушення завад [Довідник по радіолокації під ред. М. Сколника , перев. с англ. том 1 М., «Сов. радио»], який дозволяє виключити необхідність порушення процесу компенсації завад. Це здійснюється шляхом проведення вимірів рівнів завад у двох точках, а саме: вхідного рівня завади і рівня нескомпенсованого залишку на виході автокомпенсатора. Пристрій містить комутатор, детектор, інтегратор і індикатор (вимірник амплітуди). Один із входів комутатора підключають до основного входу автокомпенсатора, а другий вхід до його виходу. При цьому коефіцієнт заглушення завад (як відношення рівня завад на вході до рівня завад на виході) вимірюють шляхом поперемінного підключення вимірювальної схеми то до входу автокомпенсатора, то до його виходу. Даний пристрій по сукупності ознак найбільш близький до пропонованого. Недоліком відомого пристрою є низька точність виміру коефіцієнта заглушення завад при нестаціонарній завадовій обстановці, тобто в ситуації коли потужність активної завади змінюється в часі. Це обумовлено двома причинами. По-перше, зниженням точності обчислення коефіцієнта заглушення завад за рахунок виміру вхідних і вихідних рівнів завад на різних часових інтервалах. При нестаціонарній завадовій обстановці застосування послідовних у часі вимірів приводить до погіршення точності виміру, по-друге, погіршенням точності обчислення коефіцієнта заглушення активних завад при наявності перевідображень зондувальних сигналів РЛС від місцевих предметів, розташованих переважно в ближній зоні. При цьому перевідбиті сигнали не компенсуються (для цього в РЛС призначені пристрої швидкісної селекції), тобто їхні рівні на вході і виході автокомпенсатора приблизно однакові, що істотно перекривляє дійсне значення коефіцієнта заглушення активних завад. В основу корисної моделі поставлене завдання - підвищення точності виміру коефіцієнта заглушення завад. Поставлене завдання вирішується тим, що в пристрій контролю коефіцієнта заглушення завад, що містить індикатор і з'єднані послідовно комутатор, детектор і інтегратор, що відрізняється тим, що в нього додатково введені лінія затримки і з'єднані послідовно другий комутатор, перший пристрій вибірки і збереження, блок обчислення відношення, другий пристрій вибірки і збереження і блок керування, причому вихід лінії затримки в пропонованому пристрої підключений до входу першого комутатора. Вихід інтегратора з'єднаний з входом другого комутатора, др угий ви хід якого з'єднаний з другим входом блока обчислення відношення. Вихід другого пристрою вибірки і збереження підключений до індикатора, перший керуючий вхід інтегратора підключений до першого виходу блока керування, другий вихід якого з'єднаний з керуючими входами комутаторів і першого пристрою вибірки і збереження, а третій вихід - підключений до керуючого входу др угого пристрою вибірки і збереження, при цьому вхід синхронізації пристрою підключений до першого входу блока керування, вхід тактових імпульсів підключений до керуючого входу лінії затримки, другим входам інтегратора і блока керування, а інформаційними входами пристрою є вхід лінії затримки і другий вхід першого комутатора; у свою чергу блок керування містить перший і другий лічильники, схему І-НІ, інвертор, тригер і схему АБО-НІ, причому об'єднані встановлювальні входи лічильників з'єднані з входом інвертора і підключені до входу синхронізації блока керування, до входу тактових імпульсів підключений рахунковий вхід першого лічильника й один із входів схеми ІНІ, до інших входів якої підключені виходи першого лічильника, а вихід схеми І-НІ є першим виходом блока керування і з'єднаний з рахунковим входом другого лічильника, вихід якого є другим виходом блока керування й одним із входів схеми АБО-НІ, ви хід якої є третім виходом блока керування і підключений до входу син хронізації тригера, Д-вход якого підключений до корпуса, вхід установки одиниці підключений до виходу інвертора, а інверсний вихід підключений до іншого входу схеми АБО-НІ. Причинно-наслідковий зв'язок між сукупністю ознак корисної моделі і технічним результатом полягає в такому. Завдяки тому, що в заявляємий пристрій додатково введені: лінія затримки і з'єднані послідовно другий комутатор, перший пристрій вибірки і збереження, блок обчислення відношення, другий пристрій вибірки і збереження і блок керування, причому вихід лінії затримки підключений до входу першого комутатора, вихід інтегратора з'єднаний з входом другого комутатора, другий вихід якого з'єднаний з другим входом блока обчислення відношення, вихід другого пристрою вибору і збереження підключений до індикатора, перший керуючий вхід інтегратора підключений до першого виходу блока керування, другий вихід якого з'єднаний з керуючими входами комутаторів і першого пристрою вибірки і збереження, а третій вихід - підключений до керуючого входу др угого пристрою вибірки і збереження, при цьому вхід синхронізації пристрою підключений до першого входу блока керування, вхід тактових імпульсів підключений до керуючого входу лінії затримки, другим входам інтегратора і блока керування, а інформаційними входами пристрою є вхід лінії затримки і другий вхід першого комутатора; у свою чергу, блок керування містить перший і другий лічильники, схему І-НІ, інвертор, тригер і схему АБО-НІ, причому об'єднані встановлювальні входи лічильників з'єднані з входом інвертора і підключені до входу синхронізації блока керування, до входу тактових імпульсів підключені рахунковий вхід першого лічильника й один із входів схеми І-НІ, до інших входів якої підключені виходи першого лічильника, а вихід схеми І-НІ є першим виходом блока керування і з'єднаний з рахунковим входом другого лічильника, вихід якого є другим виходом блока керування й одним із входів схеми АБО-НІ, ви хід якої є третім виходом блока керування і підключений до входу синхронізації тригера, Д-вход якого підключений до корпуса, вхід установки одиниці підключений до виходу інвертора, а інверсний вихід підключений до іншого входу схеми АБО-НІ, підвищена точність виміру коефіцієнта заглушення завад. Сутність корисної моделі пояснюється кресленнями, де на Фіг.1 представлена електрична функціональна схема пропонованого пристрою контролю коефіцієнта заглушення завад: на Фіг.2 наведені часові діаграми керуючих сигналів, необхідних для роботи пристрою; на Фіг.3 наведена функціональна схема блока керування. Пристрій контролю коефіцієнта заглушення завад містить (див. Фіг.1) послідовно з'єднані лінію затримки 1, перший комутатор 2, детектор 3, інтегратор 4, другий комутатор 5, перший пристрій вибірки і збереження 6, блок обчислення відношення 7, другий пристрій вибірки і збереження 8 і індикатор 9, а також блок керування 10. До складу блока керування 10 входять (див. Фіг.3) перший 11 і другий 12 лічильники, схема І-НІ 13, інвертор НІ 14, тригер 15 і схема АБО-НІ 16. Другий ви хід другого комутатора 5 з'єднаний з другим входом блока обчислення відношення 7. Перший і третій виходи блока керування 10 підключені відповідно до керуючих входів інтегратора 4 і другого пристрою вибірки і збереження 8. Другий вихід блока керування 10 з'єднаний з керуючими входами комутаторів 2 і 5 і першого пристрою вибірки і збереження 6. Вхід синхронізації пристрою контролю підключений до першого входу блока керування 10, другий вхід якого з'єднаний із входом тактових імпульсів пристрою контролю і підключений до керуючого входу лінії затримки 1 і другому керуючому входу інтегратора 4. Інформаційними входами пристрою контролю є вхід лінії затримки 1 і другий вхід першого комутатора 2, до яких підключаються, відповідно, вихідний і вхідний сигнали автокомпенсатора завад (на Фіг.1 не показаний). У блоці керування 10 (див. Фіг.3) встановлювальні входи першого і другого лічильників 11 і 12 з'єднані з входом інвертора НІ 14 і підключені до першого входу (входу синхронізації) блока 10. До другого входу блока 10 (входу тактових імпульсів) підключені рахунковий вхід першого лічильника 11 і перший вхід схеми І-НІ 13, інші входи якої з'єднані з виходами першого лічильника 11. Вихід схеми І-НІ 13 є першим виходом блока керування 10 і з'єднаний з рахунковим входом другого лічильника 12 і першим входомсхеми АБО-НІ 16. Вихід другого лічильника 12 є другим виходом блока керування 10. Вихід схеми АБО-НІ 16 є третім виходом блока 10 і підключений до входу синхронізації тригера 15, Д-вход якого має низький рівень, вхід установки одиниці підключений до виходу інвертора НІ 14, а інверсний вихід з'єднаний з іншим входом схеми АБО-НІ 16. Пропонований пристрій працює таким чином. На часовому інтервалі, що передує випромінюванню зондувального сигналу в РЛС (див. на Фіг.2а інтервал між початком відліку часу і моментом формування імпульсу ІЗ), на вхід лінії затримки 1 надходить і запам'ятовується в ній вихідний сигнал автокомпенсатора активних завад, тобто нескомпенсований залишок завадового сигналу. В якості лінії затримки при цифровій реалізації пристрою контролю може використовува тися зсувний регістр, керований тактовими імпульсами. Завадовий сигнал, що діє на вході автокомпенсатора, надходить на другий вхід першого комутатора 2 і далі на детектор 3. При цьому на керуючі входи першого і др угого комутаторів 2 і 5 із др угого входу блока керування 10 надходить керуючий сигнал високого рівня (див. Фіг.2б - Кер.ком.). Після детектування завада інтегрується в інтеграторі 4. При інтегруванні (для керування ЗП, що входить до складу нагромаджуючого суматора), використовуються тактові імпульси (див. Фіг.2в - ТІ), період яких визначається темпом відновлення інформації (цифрових кодів) на інформаційних входах пристрою. З виходу інтегратора 4 через другий комутатор 5 завадовий сигнал надходить на вхід першого пристрою вибірки і збереження 6. У момент надходження з пристрою синхронізації РЛС на вхід блока керування 10 імпульсу ІЗ лічильники перший і другий 11 12 обнуляются і на виході другого лічильника 12 формується спад сигналу Кер.ком. По спаду сигналу Кер.ком. (Фіг.2б) інтегральне значення завадового сигналу, що діє на вході автокомпенсатора, фіксується в першому пристрої вибірки і збереження 6. Після цього по імпульсу Уст. інт. (Фіг.2г), формованого на виході схеми І-НІ 13 блока керування 10, інтегратор 4 обнуляется, тобто підготовляється для виконання наступного циклу інтегрування. Далі на керуючі входи комутаторів першого і другого 2 і 5 надходить сигнал Кер.ком. з рівнем логічного нуля. При цьому вхід детектора 3 через перший комутатор 2 підключається до виходу лінії затримки 1, а вихід інтегратора 4 через другий комутатор 5 підключається до другого входу блока обчислення відношення 7. Завадові сигнали з виходу автокомпенсатора, збережені в пам'яті лінії затримки 1 і відповідні тому ж часовому інтервалу, детектуються, інтегруються і через другий комутатор 5 надходять на другий вхід блока обчислення відношення 7. На перший вхід блока обчислення відношення 7 надходить інтегральне значення завадового сигналу з входу автокомпенсатора, зафіксоване в першому пристрої вибірки і збереження 6. З виходу блока обчислення відношення 7 обчислене значення коефіцієнта заглушення надходить на вхід другого пристрою вибірки і збереження 8. Причому вибірка інформації про коефіцієнт заглушення відбувається по імпульсу Упр.виб. (см. Фіг. 2д), тобто тоді, коли довершений процес інтегрування і проведено обчислення відношення рівнів завад у блоці обчислення відношення 7. Далі інформація про коефіцієнт заглушення надходить на відображення в індикатор 9. Імпульс Упр.виб. у блоці керування 10 формується таким чином. Після надходження з пристрою синхронізації РЛС імпульсу ІЗ на інвертор НІ 14 тригер 15 встановлюється в одиничний стан. При цьому на інверсному виході тригера 15 установлюється низький рівень. Після формування наступного імпульсу Уст.інт. (Фіг.2г) на виході схеми І-НІ 13, що відбувається після заповнення першого лічильника 11, на виході схеми АБО-НІ 16 формується імпульс Кер.виб. Імпульс Кер.виб. надходить також на вхід синхронізації тригера 15 і встановлює його в нульовий стан, тобто далі (до надходження наступного імпульсу ІЗ) на інверсному виході тригера 15 утримується високий рівень. На наступному часовому інтервалі керуючий сигнал Кер.ком. Фіг.2 змінюється з рівня логічного нуля на рівень логічної одиниці і робота пристрою відбувається аналогічно відповідно з керуючими сигналами, наведеними на Фіг.2. Причому, як випливає з часових діаграм керуючих сигналів, відображенню підлягає значення коефіцієнта заглушення завад, обчислене за інформацією, отриманою з часового інтервалу, що передує випромінюванню зондувального сигналу. Це дозволяє зменшити вплив перевідбитих зондувальних сигналів РЛС на точність виміру коефіцієнта заглушення активних завад. Останнєпояснюється тією обставиною, що чим більше часу пройшло з моменту випромінювання зондувального сигналу, тим від більш віддалених предметів приходять відбиті сигнали і, отже, тим менше інтенсивність останніх. Реалізація запропонованого пристрою може бути виконана й іншим чином, зокрема, аналогова реалізація пристрою контролю припускає істотне спрощення блока керування 10. Можлива також програмна реалізація пристрою на мікропроцесорній базі. Однак, це не змінює сутності об'єкта, що заявляється, що полягає в тому, що за рахунок застосування операцій затримки (1), комутації (2,5), обчислення (7), запам'ятовування (6,8) і керування (10) при обчисленні коефіцієнта заглушення завад використовуються вхідний і вихідний (залишковий) сигнал автокомпенсатора, що відповідають однієї і тієї ж реалізації завадового сигналу, що дозволяє підвищити точність виміру в нестаціонарній завадовій обстановці. Таким чином, пропонований пристрій дозволяє підвищити точність виміру коефіцієнта заглушення активних завад у нестаціонарній завадовій обстановці, а також в умовах впливу перевідображень зондувальних сигналів від місцевих предметів і пасивних завад, тобто одержати новий позитивний ефект.
ДивитисяДодаткова інформація
Назва патенту англійськоюDevice for measuring the radio-interference suppression factor
Автори англійськоюPiza Dmytro Makarovych, Zalevskyi Oleksii Pavlovych
Назва патенту російськоюУстройство для контроля коэффициента подавления радиопомех
Автори російськоюПиза Дмитрий Макарович, Залевский Алексей Павлович
МПК / Мітки
МПК: G01S 7/40, H04B 15/00
Мітки: контролю, завад, заглушення, коефіцієнта, пристрій
Код посилання
<a href="https://ua.patents.su/3-24118-pristrijj-kontrolyu-koeficiehnta-zaglushennya-zavad.html" target="_blank" rel="follow" title="База патентів України">Пристрій контролю коефіцієнта заглушення завад</a>
Пристрій бабурова для заглушення імпульсних завад
Номер патенту: 76428
Опубліковано: 15.08.2006
Автор: Бабуров Едуард Федорович
МПК: H04B 1/62
Мітки: заглушення, завад, пристрій, імпульсних, бабурова
Формула / Реферат:
Пристрій для заглушення імпульсних завад, що містить послідовно сполучені широкосмуговий підсилювач, перший обмежувач і вузькосмуговий підсилювач, який відрізняється тим, що вихід першого обмежувача сполучено з входом вузькосмугового підсилювача через введені послідовно включені передспотворюючий фільтр, другий обмежувач і коректор, причому коректор і передспотворюючий фільтр виконані з взаємооберненими амплітудно-частотними...
Пристрій для захисту від активних завад
Номер патенту: 19475
Опубліковано: 15.12.2006
Автори: ТОМАЧИНСЬКИЙ МИКОЛА ТИМОФІЙОВИЧ, Піза Дмитро Макарович, Громаковський Володимир Васильович
МПК: G01S 1/00
Мітки: захисту, пристрій, завад, активних
Формула / Реферат:
Пристрій для захисту від активних завад, що містить гостронаправлену антену, допоміжну ненаправлену антену, основний і компенсаційний канали прийому, блок автокомпенсатора, перший вхід якого з'єднаний з виходом приймача основного каналу прийому, другий вхід автокомпенсатора з'єднаний через підсилювальний блок з виходом приймача компенсаційного каналу прийому, який відрізняється тим, що в каналах прийому введені блок нормування вхідного...
Пристрій компенсації активних шумових завад
Номер патенту: 37868
Опубліковано: 15.12.2003
Автори: Мокеєв Юрій Геннадійович, Лаврентьєв Володимир Миколайович, Падалко Віктор Григорович, Каспирович Олександр Геннадійович, КОНОНОВИЧ ВІКТОР ЯКОВИЧ, Траілін Вячеслав Федорович, Мирошниченко Михайло Іванович, КОПНОВ МИХАЙЛО ОЛЕКСАНДРОВИЧ, Немчин Олександр Федорович
МПК: G01S 7/36
Мітки: пристрій, компенсації, завад, активних, шумових
Формула / Реферат:
Пристрій компенсації активних шумових завад, що містить блок обчислення вагових коефіцієнтів, лінію затримки основного каналу, лінію затримки додаткового каналу, блок помноження, блок віднімання, причому вихід лінії затримки додаткового каналу сполучений із першим входом блока помноження, вихід якого сполучений із першим входом блока віднімання, другий вхід блока віднімання підключений до виходу лінії затримки основного каналу, а вихід блока...
Пристрій компенсації активних шумових завад
Номер патенту: 38217
Опубліковано: 15.05.2001
Автори: Каспирович Олександр Геннадійович, Мирошниченко Михайло Іванович, КОПНОВ МИХАЙЛО ОЛЕКСАНДРОВИЧ, Попов Олег Якович, Мокеєв Юрій Геннадійович, Лаврентьєв Володимир Миколайович, Немчин Олександр Федорович, Луханін Михайло Іванович, КОНОНОВИЧ ВІКТОР ЯКОВИЧ
МПК: G01S 7/36
Мітки: активних, завад, пристрій, компенсації, шумових
Формула / Реферат:
1. Пристрій компенсації активних шумових завад, що включає блок обчислення вагових коефіцієнтів, лінію затримки основного каналу, лінію затримки додаткового каналу, блок множення, блок віднімання, причому входи лінії затримки основного каналу і лінії затримки додаткового каналу є входами пристрою вихід лінії затримки додаткового каналу сполучений із першим входом блока множення, вихід якого сполучений із входом блока віднімання, перший вхід...
Пристрій адаптивної компенсації активних шумових завад
Номер патенту: 69127
Опубліковано: 16.08.2004
Автор: Головань Артур Вячеславович
МПК: G01S 7/36
Мітки: компенсації, активних, шумових, пристрій, завад, адаптивної
Формула / Реферат:
Пристрій адаптивної компенсації активних шумових завад, що включає антенну систему, яка містить 2N антенних елементів з взаємно ортогональною поляризацією, два канали, один з яких зв'язаний з антенними елементами вертикальної поляризації, а другий - з елементами горизонтальної поляризації, канали розділені на N підканалів, кожний з яких містить ваговий підсилювач, вхід якого підключений до виходу антенного елементу і до входу корелятора, а...
Попередній патент: Трифазний перетворювач синусоїдальної напруги
Наступний патент: Вибухова речовина
Випадковий патент: Спосіб і пристрій для нанесення іонно-плазмових покриттів на внутрішню поверхню труби