Спосіб побудови моделі нелінійної динамічної системи
Номер патенту: 41143
Опубліковано: 15.08.2001
Автори: Гуртов Олександр Олександрович, Нащанський Олександр Анатолійович, Зубко Олег Олександрович, Зєліков Всеволод Ілліч, Серков Олександр Анатолійович, Горєлов Олександр Сергійович

Формула / Реферат
Спосіб побудови моделі нелінійної динамічної системи, що включає до свого складу подачу тестуючих імпульсів, визначення реакції на тестуючий імпульс, який відрізняється тим, що додаткове тестування відбувається пакетом імпульсів, кількість яких у пакеті та часова відстань між ними змінюєтся під час тестування.
Текст
Спосіб побудови моделі нелінійної динамічної системи, що включає до свого складу подачу тестуючих імпульсів, визначення реакції на тестуючий імпульс, який відрізняється тим, що додаткове тестування відбувається пакетом імпульсів, кількість яких у пакеті та часова відстань між ними змінюється під час тестування. ____________________ В.Ш. Відомо, що зв'язок між входом та виходом нелінійної динамічної системи визначається співвідношенням h1(t1)=b1l1(t1)+b2l2(t1)+…+b nln(t1) (13) (1) При цьому задача побудови моделі зводиться до визначення ядер h1(t)...hn(t) нелінійної динамічної системи. Визначення ядер Вольтера можливе при тестуванні нелінійної динамічної системи імпульсами. Так, при визначенні ядра першого порядку h1(t1), яке має вигляд 41143 … dtn (11) 0 (2) де l1... ln - функції Лагера, b1...bn - невідомий коефіцієнт. Тестування та визначення коефіцієнтів b1...bn можливе одиночними імпульсами. При визначенні ядра другого порядку h2(t1, t2), яке має вигляд h1(t1, t2)=b1l1(t1)l2(t2)+b 2l2(t1)l2(t2)+…+b nln(t1)ln(t2) тестування можливе тільки пакетом з двох імпульсів, причому спочатку треба визначити відстань між ними. UA 0 x dt1dt2+…+ ò ...ò h1( t1,..., tn )x1( t - t1)...xn ( t - tn )dt1... А ¥ Y( t ) = ò h1( t)x( t - t)dt + òò h2 ( t1, t2 )x1( t - t1)x 2 ( t - t2 ) x (19) Винахід відноситься до галузі автоматичного керування та може бути використаний для побудови моделі нелінійної динамічної системи. Відомий спосіб побудови моделі нелінійної динамічної системи [1] включає до свого складу подачу одиноких імпульсних сигналів до входу динамічної системи та визначення коефіцієнтів моделі. Завдяки визначеним коефіцієнтам будується модель динамічної системи. Однак недоліком відомого способу є те, що побудована таким чином модель не враховує нелінійні та динамічні характеристики системи,що викликає значну похибку між існуючою системою та побудованою моделлю. Ці недоліки частково усунуті у відомому способі побудови моделі нелінійної динамічної системи, який є найбільш близьким до запропонованого, та включає до свого складу подачу сигналу, що має рівномірний енергетичний спектр у полосі частот, яка перевищує полосу частот тестуємої системи, та визначаються коефіцієнти моделі системи [2]. Відомий спосіб дозволяє побудувати модель тестуємої системи підвищеної якості за рахунок розширення частотного діапазону тестуючого сигнала. Однак апріорно невідома інтенсивність тестуючого сигналу, що значно звужує клас режимів роботи динамічної системи у процесі ідентифікації, припускаючи значну похибку при побудові моделі нелінійної динамічної системи. В основу винаходу покладено задачу підвищення точності побудови моделі нелінійної динамічної системи шляхом урахування нелінійних та динамічних властивостей тестуємої системи. 41143 Таким чином для визначення ядра третього порядку необхідно тестування пакетом з 3 імпульсів. При цьому кількість визначених ядер впливає на якість побудови моделі тестуємої системи. Поставлена задача вирішується тим, що спосіб побудови моделі нелінійної динамічної системи, який включає до свого складу подачу тестуючого сигналу до входу нелінійної динамічної системи та визначення коефіцієнтів моделі. Згідно з винаходом попереднє тестування здійснюється пакетом сигналів, кількість яких та часова відстань між ними змінюється під час тестування. При цьому спочатку визначається часова відстань між двома імпульсами у пакеті. Критерієм визначеної відстані є реакція системи на пакет з двох імпульсів такою, як реакція на два одиноких імпульси. Ця ча сова відстань є мірою інерційності тестуємої системи. Після визначення інерційності системи здійснюється тестування системи пакетом імпульсів, кількість яких змінюється під час тестування, та визначаються коефіцієнти моделі. При цьому будуть враховані інерційні та динамічні якості тестуємої системи. За рахунок використання запропонованого способу підвищується точність побудови моделі на 10-12%. Джерела інформації: 1. Авторское свидетельство СССР № 1215093, МПК G05B 23/02, БИ № 8, 28.02.86. 2. Дейч A.M. Методы идентификации динамических объектов. М.: «Энергия», 1979, с.240. Тираж 50 екз. Відкрите акціонерне товариство «Патент» Україна, 88000, м. Ужгород, вул. Гагаріна, 101 (03122) 3 – 72 – 89 (03122) 2 – 57 – 03 2 41143 3
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod of model construction of non-linear dynamic system
Автори англійськоюHorielov Oleksandr Serhiyovych, Hurtov Oleksandr Oleksandrovych, Zielikov Vsevolod Illich, Zubko Oleh Oleksandrovych, Naschanskyi Oleksandr Anatoliyovych, Serkov Oleksandr Anatoliiovych
Назва патенту російськоюСпособ построения модели нелинейной динамической системы
Автори російськоюГорелов Александр Сергеевич, Гуртов Александр Александрович, Зеликов Всеволод Ильич, Зубко Олег Александрович, Нащанский Александр Анатольевич, Серков Александр Анатольевич
МПК / Мітки
МПК: G05B 23/02
Мітки: побудови, моделі, системі, динамічної, спосіб, нелінійної
Код посилання
<a href="https://ua.patents.su/3-41143-sposib-pobudovi-modeli-nelinijjno-dinamichno-sistemi.html" target="_blank" rel="follow" title="База патентів України">Спосіб побудови моделі нелінійної динамічної системи</a>
Спосіб і пристрій діючої моделі сонячної системи
Номер патенту: 33296
Опубліковано: 15.02.2001
Автор: Гришко Дмитро Миколайович
МПК: G09B 27/00
Мітки: системі, моделі, сонячної, діючої, пристрій, спосіб
Текст:
...сила в ід центру. Зм іною обертання колеса, нахилом каналів в колесі і зміною сили вакууму досягаємо, щоб рівність сил знаходилась за межами колеса, тоді за рахунок молекулярного щеплення за критичним рад іусом виникає рух пов ітря по визначеному закону. Ізолюючи потік пов ітря за напрямом обер тання ко леса, м аємо стійкий р ух по колу ідентичний руху ефіру в Сонячній або планетній системах. Вводячи кольорові кульки в по в ітря ний по тік,...
Присрій нелінійної обробки кольорорізницевих сигналів у кодері системи секам
Номер патенту: 19683
Опубліковано: 25.12.1997
Автори: Платзерова Наталія Олександрівна, Красовський Андрій Валерьєвич, Горьєв Сергій Адольфович, Солп Микола Опанасович, Гофайзен Олег Вікторович, Крюкова Тетяна Дмитрівна
МПК: H04N 9/65
Мітки: системі, сигналів, секам, обробки, кодері, кольорорізницевих, присрій, нелінійної
Формула / Реферат:
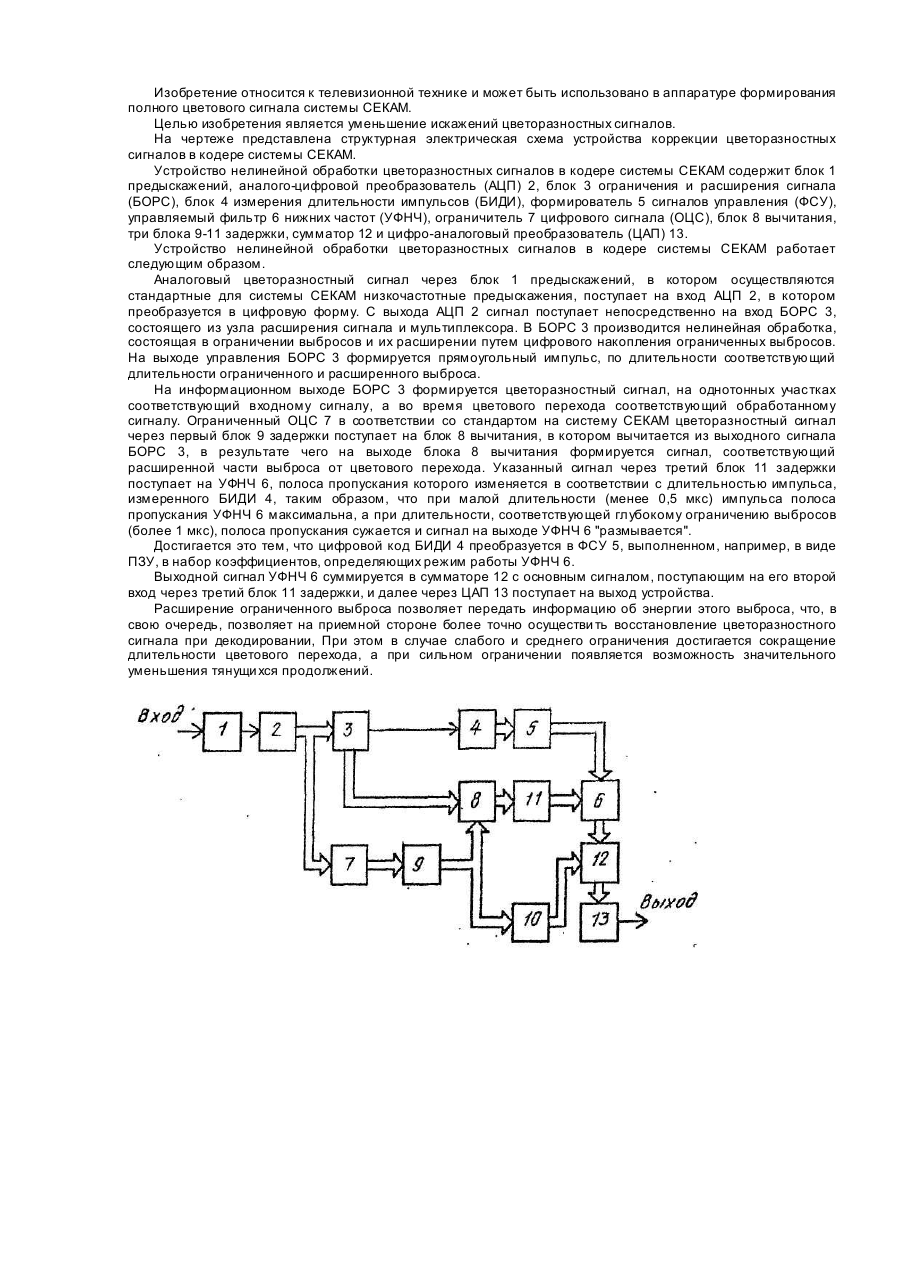
Устройство нелинейной обработки цветоразностных сигналов в кодере системы СЕКАМ, содержащее последовательно соединенные блок предыскажений, аналого-цифровой преобразователь (АЦП) и блок ограничения и расширения сигнала, а также цифроаналоговый преобразователь (ЦАП), отличающееся тем, что введены последовательно соединенные блок измерения длительности импульсов, формирователь сигналов управления, управляемый фильтр нижних частот и сумматор,...
Спосіб зміни динамічної провідності напівпроводникового матеріалу
Номер патенту: 23308
Опубліковано: 31.08.1998
Автори: Павлишин Олег Володимирович, Стахіра Роман Йосипович, Стахіра Павло Йосипович, Готра Зенон Юрійович
МПК: H01L 31/08
Мітки: зміни, динамічної, напівпроводникового, провідності, матеріалу, спосіб
Формула / Реферат:
Спосіб зміни динамічної провідності напівпровідникового матеріалу, згідно з яким до напівпровідникового елементу прикладають постійну електричну напругу, здійснюють періодичний тепловий нагрів та фіксують амплітуду, частоту та фазу вихідного сигналу, який відрізняється тим, що після фіксації амплітуди, частоти та фази вихідного сигналу, продовжуючи періодичний тепловий нагрів, діють модульованим оптичним випромінюванням з області спектра...
Спосіб моделювання динамічної кишкової непрохідності
Номер патенту: 39247
Опубліковано: 15.06.2001
Автори: Свистун Роман Васильович, Бенедикт Наталія Володимирівна, Бенедикт Володимир Володимирович, Гнатюк Михайло Степанович
МПК: G09B 23/28
Мітки: непрохідності, спосіб, моделювання, кишкової, динамічної
Формула / Реферат:
Спосіб моделювання динамічної кишкової непрохідності, який включає подразнення стінки тонкої кишки, який відрізняється тим, що подразнення здійснюють дозовано шляхом нанесення на серозну оболонку кишки порошку мінеральної природи.
Спосіб диференційної діагностики механічної і динамічної кишкової непрохідності
Номер патенту: 31740
Опубліковано: 15.12.2000
Автори: Бардюк Олександр Якович, Тамм Тамара Іванівна, Кутєпов Сергій Борисович
Мітки: диференційної, кишкової, непрохідності, механічної, діагностики, спосіб, динамічної
Текст:
...кількісну і якісну характеристику непрохідності і провести точну диферепційпу діагностику її виду. Застосування бальної оцінки спростовує використання даного способу на практиці. Спосіб, ідо заявляється, здійснюють таким чином. Виконують ультразвукове дослілження органів черевної порожнини, виявляють розширені петлі тонкої кишки, знаходять ехографічні ознаки кишкової непрохідності, феномен "секвестрації" рідини в просвіт кишки, наявність...
Попередній патент: Спосіб обробки насіннєвої картоплі перед садінням
Наступний патент: Вузькозахватний вугільний комбайн “таран-2″
Випадковий патент: Упаковка для продукту, зокрема прального порошку