Пристрій для збудження сейсмічних коливань
Номер патенту: 2537
Опубліковано: 15.06.2004
Автори: Макогон Анатолій Іванович, Мельник Анатолій Кирилович, Хакімов Хаміт Габбасовіч, Шаріфуллін Равіль Адгамовіч, Адієв Явдат Равіловіч, Ахметшін Ільдар Нугаміровіч, Ткаченко Валерій Павлович, Бару Юрій Аркадійович, Зайцев Ігор Тимофійович
Формула / Реферат
1. Пристрій для збудження сейсмічних коливань, що містить зовнішній корпус, інертну масу, направляючу колону, опорну плиту, амортизатори, а також електромагнітний привід, що включає в себе якір, кільцева магнітна система якого містить магнітопровід, встановлений у своєму корпусі, і індуктор, кільцева магнітна система якого також містить магнітопровід, встановлений у своєму корпусі, і обмотку, розміщену в кільцевому пазу, індуктор і якір розташовані вздовж направляючої колони послідовно у напрямку вгору від опорної плити, при цьому індуктор має можливість осьового переміщення вздовж вертикальної осі пристрою без провертання, а його корпус нерухомо з'єднаний з зовнішнім корпусом і інертною масою, який відрізняється тим, що інертна маса встановлена на нижньому торці корпусу індуктора, кінематично зв'язаного з опорною плитою за допомогою нижнього підшипника ковзання, цапфа якого нерухомо встановлена між направляючою колоною і опорною плитою з можливістю взаємодії з поверхнею ковзання, яка є на внутрішній кільцевій поверхні корпусу індуктора, якір також має можливість осьового переміщення вздовж вертикальної осі пристрою без провертання, його корпус нерухомо з'єднаний з цапфою верхнього підшипника ковзання, кінематично зв'язаною з внутрішньою кільцевою поверхнею зовнішнього корпусу, де є поверхня ковзання підшипника, при цьому цапфа верхнього підшипника жорстко з'єднана з кришкою додаткового внутрішнього підшипника ковзання, виконаною з можливістю взаємодії з поверхнею ковзання, яка є у верхній частині направляючої колони, і буфером, встановленим на верхньому торці зовнішнього корпусу, при цьому направляюча колона має ступінчасту форму, її опорна поверхня виконана з можливістю взаємодії з внутрішньою торцевою поверхнею корпусу якоря, кінематично зв'язаного з зовнішнім корпусом.
2. Пристрій за п. 1, який відрізняється тим, що цапфа нижнього підшипника ковзання зв'язана з поверхнею ковзання шпонкою.
3. Пристрій за п. 1, який відрізняється тим, що корпус якоря зв'язаний з зовнішнім корпусом торцевою шпонкою.
Текст
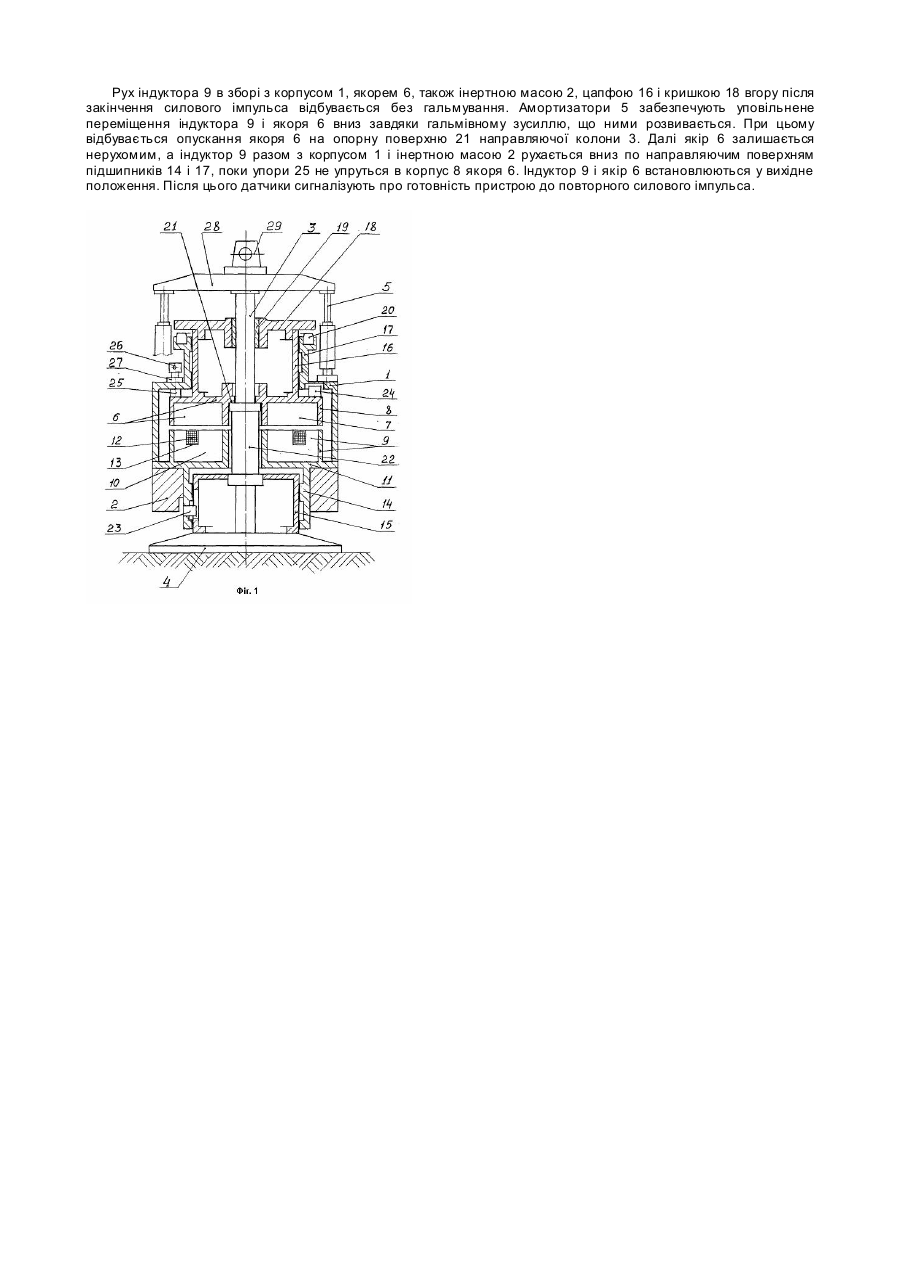
Корисна модель належить до невибухови х джерел сейсмічних коливань і призначена для створення сейсмічних хвиль шляхом імпульсних силових діянь на поверхню грунту, зокрема, до пристроїв електромагнітного типу. Відомий пристрій для збудження сейсмічних коливань, описаний в авторському свідоцтві SU 988075 А від 29.12.1980., МПК 3 G01 V 1/04, оп уб.23.07.1985, Бюл.№27. Пристрій містить зовнішній корпус, інертну масу, направляючу колону, опорну плиту, амортизатори, а також електромеханічний привод. Привод включає в себе якір, кільцева магнітна система якого містить магнітопровід, встановлений в корпусі, і індуктор, розташований з можливістю осьового переміщення вздовж вертикальної осі пристрою без провертання. Кільцева магнітна система індуктора також містить магнітопровід, встановлений у своєму корпусі, і обмотку. Корпус індуктора жорстко зв'язаний з інертною масою, опорна плита жорстко зв'язана з якорем. Якір та індуктор електромеханічного привода розташовані коаксіальне, іхні обмотки знаходяться в кільцевих пазах на обернутих одна до одної бічних поверхнях магнітопроводів. Нижній кінець направляючої колони вільний і центрується направляючим виступом, який жорстко зв'язаний з корпусом якоря, розташованого ззовні індуктора. В ролі електромеханічного привода використаний привод електродинамічного типу. Недоліком відомої конструкції можна вважати низьку ефективність перетворення електричної енергії в механічну, що передається у вигляді імпульсу силового діяння на поверхню грунту. Обумовлено це використанням привода електродинамічного типу. Крім того, відомий пристрій має значні масогабаритні показники, що обмежує його застосування. Найбільш близьким до заявлюваного можна вважати пристрій для збудження сейсмічних коливань, що містить зовнішній корпус, інертну масу, направляючу колону, опорну плиту, амортизатори, а також електромагнітний привод. (Див. деклараційний патент иА№1748 від 20.08.2002., МПК 7 G01 V 1/04, опуб. 15.04.2003., Бюл. №4). Привод включає в себе якір, кільцева магнітна система якого містить магнітопровід, встановлений у своєму корпусі, і індуктор. Кільцева магнітна система індуктора також містить магнітопровід, який встановлений у своєму корпусі, і обмотку, розміщену в кільцевому пазі. Індуктор і якір розташовані вздовж направляючої колони послідовно у напрямку вгору від опорної плити. При цьому індуктор має можливість осьового переміщення вздовж вертикальної осі пристрою без провертання. Корпус індуктора нерухомо з'єднаний з зовнішнім корпусом та інертною масою. Вказані ознаки є спільними з заявлюваною конструкцією. У відомому пристрої опорна плита жорстко з'єднана з якорем за допомогою направляючої колони. Інертна маса встановлена на верхньому торці зовнішнього корпусу, який жорстко зв'язує ії з корпусом індуктора. Направляюча колона кінематичне зв'язана безпосередньо з індуктором фігурною шпонкою. Недоліком відомої конструкції є зниження надійності пристрою при збільшенні його потужності Це обумовлено тим, що направляюча колона у відомому пристрої використовується для центрування і сприймання силових навантажень. Так як направляюча колона розміщена в центральному отворі електромагнітного привода, ії розміри обмежені. Тому потужність пристрою також обмежена вимогами до надійності. В основу корисної моделі поставлена задача створити такий пристрій для збудження сейсмічних коливань, в якому нова компоновка дозволяє забезпечити надійне центрування якоря відносно індуктора при більш потужних силових імпульсах за рахунок розміщення центруючих і направляючих поверхонь на зовнішньому корпусі, тобто на більшому діаметрі. Крім того, вибір конструкції, в якій переміщення рухомих частин супроводжується "підхватом" якоря після закінчення силового імпульса, дозволяє одержати надійний пристрій, що забезпечує не тільки більш потужні силові імпульси, але й мінімальні масогабаритні параметри. До розв'язання поставленої задачі у пристрої для збудження сейсмічних коливань, що містить зовнішній корпус, інертну масу, направляючу колону, опорну плиту, амортизатори, а також електромагнітний привод, що включає в себе якір, кільцева магнітна система якого містить магнітопровід, встановлений у своєму корпусі, і індуктор, кільцева магнітна система якого також містить магнітопровід, встановлений у своєму корпусі, і обмотку, розміщену в кільцевому пазі, індуктор і якір розташовані вздовж направляючої колони послідовно у напрямку вгору від опорної плити, при цьому індуктор має можливість осьового переміщення вздовж вертикальної осі пристрою без провертання, а його корпус нерухомо з'єднаний з зовнішнім корпусом і інертною масою, згідно з корисною моделлю, інертна маса встановлена на нижньому торці корпусу індуктора, кінематичне зв'язаного з опорною плитою за допомогою нижнього підшипника ковзання. Цапфа нижнього підшипника ковзання нерухомо встановлена між направляючою колоною і опорною плитою з можливістю взаємодії з поверхнею ковзання, яка є на внутрішній кільцевій поверхні корпусу індуктора. Якір привода також має можливість осьового переміщення вздовж вертикальної осі пристрою без провертання. Його корпус нерухомо з'єднаний з цапфою верхнього підшипника ковзання, кінематичне зв'язаною з внутрішньою кільцевою поверхнею зовнішнього корпусу, де є поверхня ковзання підшипника. При цьому цапфа верхнього підшипника жорстко з'єднана з кришкою додаткового внутрішнього підшипника ковзання, виконаною з можливістю взаємодії з поверхнею ковзання, яка є у верхній частині направляючої колони, і буфером, встановленим на верхньому торці зовнішнього корпусу. Направляюча колона має ступінчасту форму, а ії опорна поверхня виконана з можливістю взаємодії з внутрішьною торцевою поверхнею корпусу якоря, кінематичне зв'язаного з зовнішнім корпусом. Цапфа нижнього підшипника ковзання може бути зв'язана з поверхнею ковзання шпонкою. Корпус якоря може бути зв'язаний з зовнішнім корпусом торцевою шпонкою. Розміщення верхнього підшипника ковзання на зовнішньому корпусі і нижнього на корпусі індуктора забезпечує незалежність їхні х розмірів за діаметром від розмірів електромагнітного привода, що дозволяє одержати надійне центрування якоря і індуктора при потужних силових імпульсах. Застосування буфера забезпечує "підхват" якоря після закінчення силового імпульса, виключає співударяння магнітопроводів якоря і індуктора, гасить частину кінетичної енергії індуктора, накопиченої під час силового імпульса, а отже зменшує висоту переміщення рухомих частин пристрою і його масогабаритні параметри. Застосування третього внутрішнього підшипника ковзання, встановленого між цапфою верхнього підшипника і направляючою колоною, забезпечує плавне переміщення індуктора разом з інертною масою і масою якоря вгору по інерції після закінчення силового імпульса. Наявність в конструкції трьох підшипників ковзання дозволяє забезпечити рух частин пристрою, при якому спочатку під час силового імпульса переміщаються якір т опорна плита вниз без провертання на величину деформації грунту, а індуктор і зовнішній корпус - вгору також без провертання, потім після закінчення силового імпульса індуктор спільно з якорем, інертною масою, цапфою верхнього підшипника ковзання, кришкою внутрішнього підшипника ковзання і зовнішнім корпусом переміщаються по інерції вільно вгору. При такій конструкції в процесі гасіння кінетичної енергії використовуються маси майже всіх елементів пристрою, що мають також інше функціональне призначення. Заявлювана конструкція ілюструється кресленням, де представлений загальний вигляд пристрою, поздовжній розріз. Пристрій для збудження сейсмічних коливань містить зовнішній корпус 1, інертну масу 2, направляючу колону 3, опорну плиту 4 і амортизатори 5. Електромагнітний привод пристрою включає в себе якір 6, кільцева магнітна система якого містить магнітопровід 7, встановлений у своєму корпусі 8,і індуктор 9. Кільцева магнітна система індуктора 9 також містить магнітопровід 10, встановлений у корпусі 11, і обмотку 12, яка розміщена в кільцевому пазі 13. Індуктор 9 і якір 6 розташовані в корпусі 1 вздовж направляючої колони З послідовно у напрямку вгор у від опорної плити 4. Індуктор 9 має можливість осьового переміщення вздовж вертикальної осі пристрою без провертання. Корпус 11 індуктора нерухомо з'єднаний з зовнішнім корпусом 1 і інертною масою 2. Інертна маса 2 встановлена з боку нижнього торця корпусу 11 індуктора 9. Корпус 11 індуктора 9 кінематичне зв'язаний з опорною плитою 4 за допомогою нижнього підшипника ковзання 14. Цапфа 15 підшипника ковзання 14 встановлена між направляючою колоною 3 і опорною плитою 4 і жорстко зв'язана з ними. Поверхня ковзання нижнього підшипника 14 виконана на внутрішній кільцевій поверхні корпусу 11 індуктора 9. Якір 6, як і індуктор 9, має можливість осьового переміщення вздовж вертикальної осі пристрою без провертання. Його корпус 8 жорстко з'єднаний з цапфою 16 верхнього підшипника ковзання 17. Цапфа 16 кінематичне зв'язує корпус 8 якоря 6 з зовнішнім корпусом 1,де на внутрішній кільцевій поверхні є поверхня ковзання підшипника 17. Цапфа 16 верхнього підшипника ковзання жорстко зв'язана з кришкою 18 додаткового внутрішнього підшипника ковзання 19. Його поверхня ковзання виконана у верхній частині направляючої колони 3. Кришка 18 внутрішнього підшипника ковзання 19 виконана з можливістю взаємодії з буфером 20, встановленим на верхньому торці зовнішнього корпусу 1 для виключення співударяння магнітопроводів якоря 6 і індуктора 9. Направляюча колона 3 має ступінчасту форму, причому її опорна поверхня 21 виконана з можливістю взаємодії з внутрішньою торцевою поверхнею корпусу 8 якоря 6. Середня частина направляючої колони З використовується в ролі штовхача 22 для передачі зусилля від якоря 6 до опорної плиті 4. Для виключення провертання індуктора 9 відносно плити 4 цапфа 15 нижнього підшипника ковзання може бути кінематичне зв'язана з корпусом 11 індуктора 9 шпонкою 23. Для виключення провертання якоря 6 відносно зовнішнього корпусу 1 кінематичний зв'язок корпусу 8 якоря 6 з зовнішнім корпусом 1 може бути утворений торцевою шпонкою 24. Зовнішній корпус 1 споряджений регулювальними упорами 25. Упори 25 призначені для установки індуктора 9 у ви хідне положення перед роботою. Регулювання величини робочого повітряного проміжку (не показаний) між магнітопроводами 10, 7 індуктора 9 і якоря 6 здійснюється за допомогою гвинтів 26 і контргайок 27, розташованих на корпусі 1. Для плавного опускання зовнішнього корпусу 1 у зборі з індуктором 9 і інертною масою 2 у ви хідне положення на упори 25 під час роботи після завершення силового імпульса на верхньому зовнішньому торці корпусу 1 розміщені амортизатори 5. Один кінець амортизаторів 5 кріпиться шарнірно до корпусу 1, а другий - шарнірно до траверси 28. Для переміщення пристрою на траверсі 28 передбачений транспортний захват 29. Про установку пристрою у вихідне положення перед роботою, готовності до створення силового імпульса, сигналізують датчики (не показані). Пристрій працює наступним чином. В точці проведения сейсморозвідувальних робіт пристрій опускається на поверхню землі за допомогою транспортного захвата 29. За допомогою упорів 25 індуктор 9 встановлюється у вихідне положення. Пристрій готовий до роботи. За командою від сейсмостанції по обмотці 12 протікає імпульс електричного струму. При взаємодії магнітного поля струму обмотки 12 з магнітопроводом 7 якоря 6 виникає імпульс механічної сили, що забезпечує притягання між якорем 6 і індуктором 9 в зборі з корпусом 1, інертною масою 2. При цьому корпус 8 якоря 6 через опорну поверхню 21 передає зусилля направляючій колоні 3, штовхач 22 якої далі передає механічний імпульс сили вниз на опорну плиту 4 і в землю, збуджуючи сейсмічний імпульс. При цьому цапфою 16 здійснюється центрування відносно опорної плити 4 за допомогою цапфи 15 нижнього підшипника ковзання 14. Торцева шпонка 24 попереджує провертання якоря 6 відносно корпусу 1. Індуктор 9 разом з корпусом 1 і інертною масою 2 рухається вгору по направляючих поверхнях ковзання підшипників 14 і 17, а шпонка 23 попереджує провертання індуктора 9 відносно опорної плити 4. Для уникнення співударяння магнітопроводів 10 і 7 відповідно індуктора 9 і якоря 6 в кінці силового імпульса буфер 20 ударяє в кришку 18 і відбувається "підхват" якоря 6 в зборі з цапфою 16 і кришкою 18. Подальше переміщення індуктора 9 в зборі з інертною масою 2 і корпусом 1 відбувається із збільшеною масою, тому що додаються маси якоря 6, цапфи 16 і кришки 18. Збільшення маси елементів пристрою, що рухаються вгору, приводить до зменшення висоти їх переміщення. Рух індуктора 9 в зборі з указаними вище елементами по направляючій колоні З відбувається за допомогою кришки 18 внутрішнього підшипника 19 і цапфи 15 нижнього підшипника 14, які центрують рухому частин у пристрою. Опорна плита 4, цапфа 15 і направляюча колона 3 з траверсою 28, при цьому, залишаються нерухомими. Рух індуктора 9 в зборі з корпусом 1, якорем 6, також інертною масою 2, цапфою 16 і кришкою 18 вгору після закінчення силового імпульса відбувається без гальмування. Амортизатори 5 забезпечують уповільнене переміщення індуктора 9 і якоря 6 вниз завдяки гальмівному зусиллю, що ними розвивається. При цьому відбувається опускання якоря 6 на опорну поверхню 21 направляючої колони 3. Далі якір 6 залишається нерухомим, а індуктор 9 разом з корпусом 1 і інертною масою 2 рухається вниз по направляючим поверхням підшипників 14 і 17, поки упори 25 не упруться в корпус 8 якоря 6. Індуктор 9 і якір 6 встановлюються у вихідне положення. Після цього датчики сигналізують про готовність пристрою до повторного силового імпульса.
ДивитисяДодаткова інформація
Автори англійськоюBary Yurii Arkadiiovych, Zaitsev Ihor Tymofiiovych
Автори російськоюБару Юрий Аркадиевич, Зайцев Игорь Тимофеевич
МПК / Мітки
МПК: G01V 1/02
Мітки: коливань, збудження, пристрій, сейсмічних
Код посилання
<a href="https://ua.patents.su/3-2537-pristrijj-dlya-zbudzhennya-sejjsmichnikh-kolivan.html" target="_blank" rel="follow" title="База патентів України">Пристрій для збудження сейсмічних коливань</a>
Пристрій для збудження сейсмічних коливань
Номер патенту: 1748
Опубліковано: 15.04.2003
Автори: Водаков Генріх Самуілович, Зайцев Ігор Тимофійович, Ткаченко Валерій Павлович, Бару Юрій Аркадійович, Мельник Анатолій Кирилович
МПК: G01V 1/02
Мітки: пристрій, збудження, коливань, сейсмічних
Формула / Реферат:
1. Пристрій для збудження сейсмічних коливань, що містить зовнішній корпус, інертну масу, напрямну колону, опорну плиту, амортизатори, а також електромеханічний привід, що включає якір, кільцева магнітна система якого містить магнітопровід, встановлений у своєму корпусі, і індуктор, розташований з можливістю осьового переміщення по напрямній колоні без прокручування, при цьому його кільцева магнітна система містить магнітопровід, встановлений...
Пристрій для збудження сейсмічних коливань
Номер патенту: 15976
Опубліковано: 29.08.1997
Автори: Гладченко Валентин Яковлевич, Бадіков Миколай Васильович, Бяков Юрій Олексійович, Набока Борис Григорович, Михайлусь Юрий Васильович, Гурин Анатолій Григорович
МПК: G01V 1/02
Мітки: збудження, сейсмічних, пристрій, коливань
Формула / Реферат:
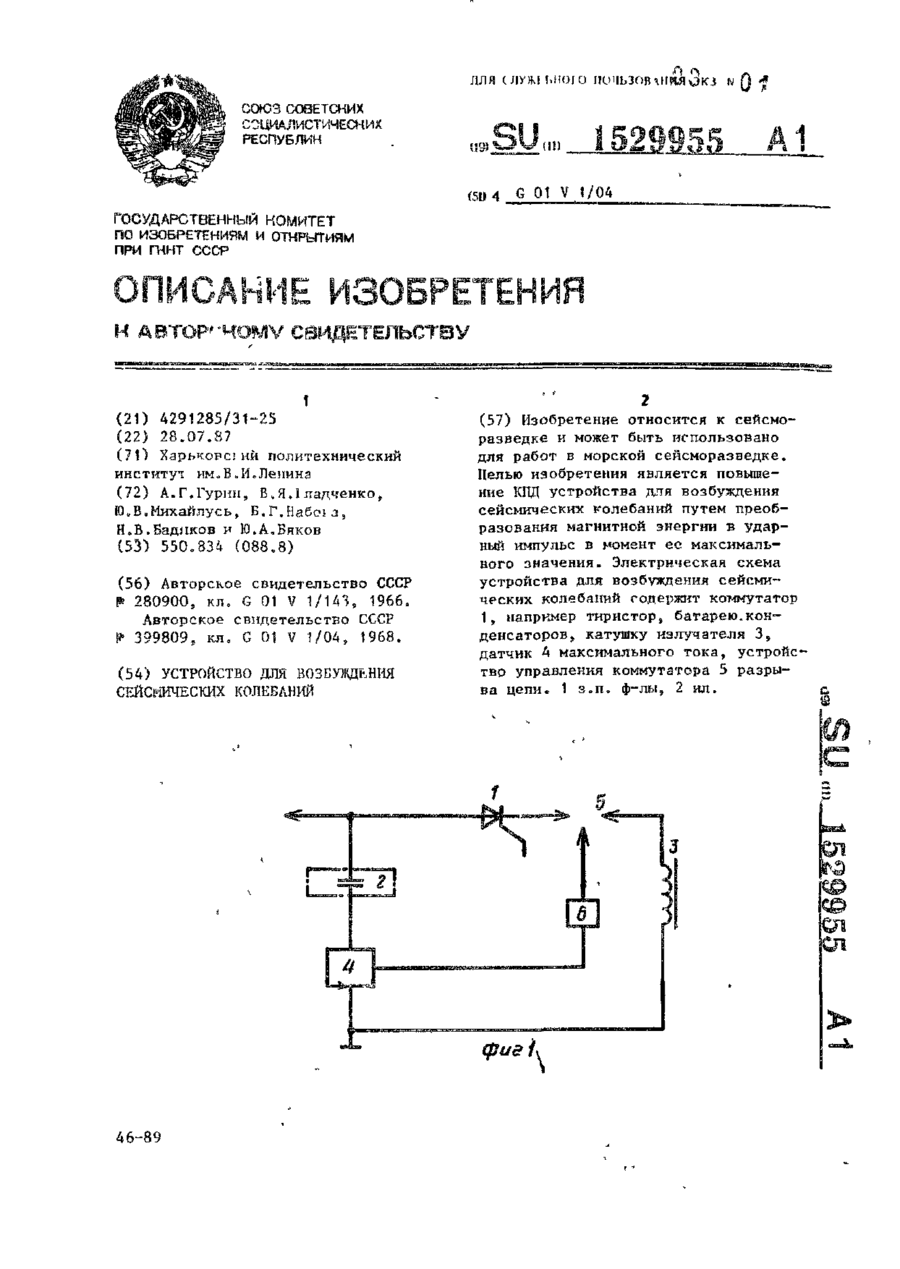
1. Устройство для возбуждения сейсмических колебаний, содержащее излучатель, зарядное устройство, емкостной накопитель энергии, включенные параллельно, и устройство коммутации, установленное последовательно в цепи излучателя, отличающееся тем, что, с целью повышения КПД устройства путем преобразования магнитной энергии в ударный импульс в момент получения ее максимального значения, в него дополнительно введены коммутатор разрыва цепи тока...
Спосіб збудження сейсмічних коливань
Номер патенту: 57803
Опубліковано: 15.07.2003
Автори: Роман Володимир Іванович, Сиротенко Петро Тимофійович, Ковальчук Богдан Михайлович
МПК: G01V 1/02
Мітки: коливань, сейсмічних, збудження, спосіб
Формула / Реферат:
1. Спосіб збудження сейсмічних коливань, що включає використання для збудження сейсмічних коливань електромеханічного перетворювача з активною і реактивною частинами, формування і подавання на електромеханічний перетворювач електричного імпульсу, перетворення електричного імпульсу в силовий імпульс, який прикладається між реактивною і активною частинами електромеханічного перетворювача, і утворення силового імпульсу безпосередньо під час...
Спосіб збудження сейсмічних коливань
Номер патенту: 3408
Опубліковано: 27.12.1994
Автори: Поветкин Микола Олексійович, Литвиненко Олег Олександрович, Гурин Анатолій Григорович
МПК: G01V 1/02
Мітки: коливань, збудження, спосіб, сейсмічних
Формула / Реферат:
Способ возбуждения сейсмических колебаний, включающий погружение электродов в грунт и подачу на них электрического импульса от накопителя энергии, отличающийся тем, что электроды располагают в грунте в углах квадрата, сторона которого выбрана из условия:где U - напряжение, приложенное к электродам,Еr - допустимое пробивное напряжение данного грунта.
Спосіб та пристрій для збудження сейсмічних хвиль
Номер патенту: 57841
Опубліковано: 15.07.2003
Автори: Роман Володимир Іванович, Пігнастій Сергій Сергійович
МПК: G01V 1/02
Мітки: хвиль, збудження, спосіб, пристрій, сейсмічних
Формула / Реферат:
1. Спосіб збудження сейсмічних хвиль з використанням електромеханічного перетворювача, який має активну та реактивну частини, установлені з можливістю обертання однієї відносно одної, що включає формування і подачу електричного імпульсу на обмотки перетворювача, передачу силової дії на досліджуване середовище за допомогою механічно зв'язаної з ним активної частини, який відрізняється тим, що активну і реактивну частини установлюють одна...
Попередній патент: Модульний хопер-вагон
Наступний патент: Опора приладу
Випадковий патент: Система управління газотурбінним двигуном