Апарат з плавцевим рушієм
Номер патенту: 25799
Опубліковано: 30.10.1998
Автори: Бабенко Віктор Вітальович, Поліщук Сергій Володимирович
Формула / Реферат
Аппарат с плавниковым движителем, содержащий корпус с плавниковым движителем, отличающийся тем, что последний содержит цилиндр, размещенный в его кормовой части и соединенный посредством осей с шайбами, жестко закрепленными на торцевых поверхностях движителя, и касающийся своей боковой поверхностью валика, установленного в прорези кормовой части плавника, на одной оси с которым находится ролик, связанный передачей с роликом электродвигателя вращательного движения, расположенным в теле плавника, а корпус аппарата выполнен двухсоставным, - с носовой частью, в которой размещен электродвигатель колебательного движения со стеблем и плавниковым движителем, и кормовой частью, соединенными между собой в вертикальной плоскости двумя направляющими.
Текст
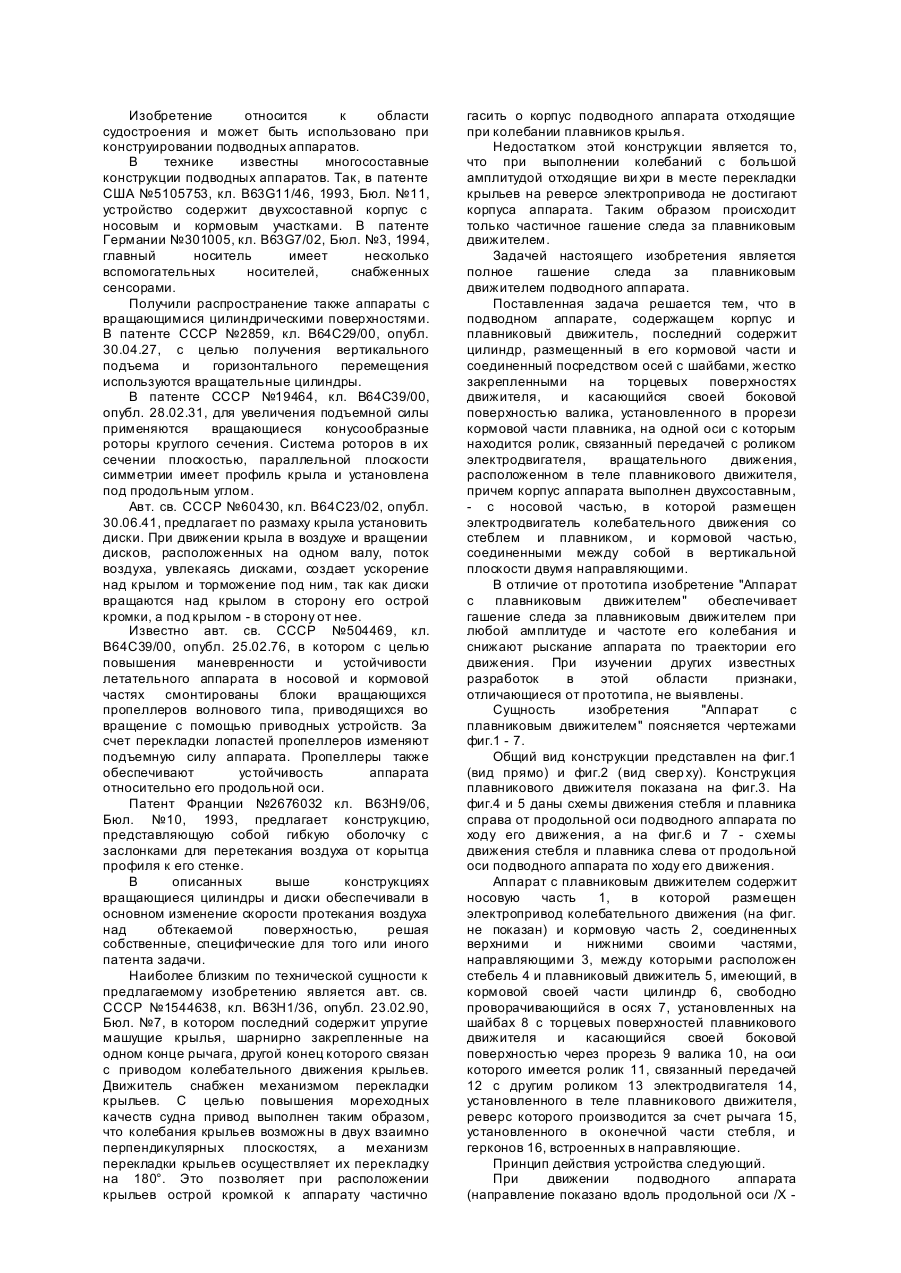
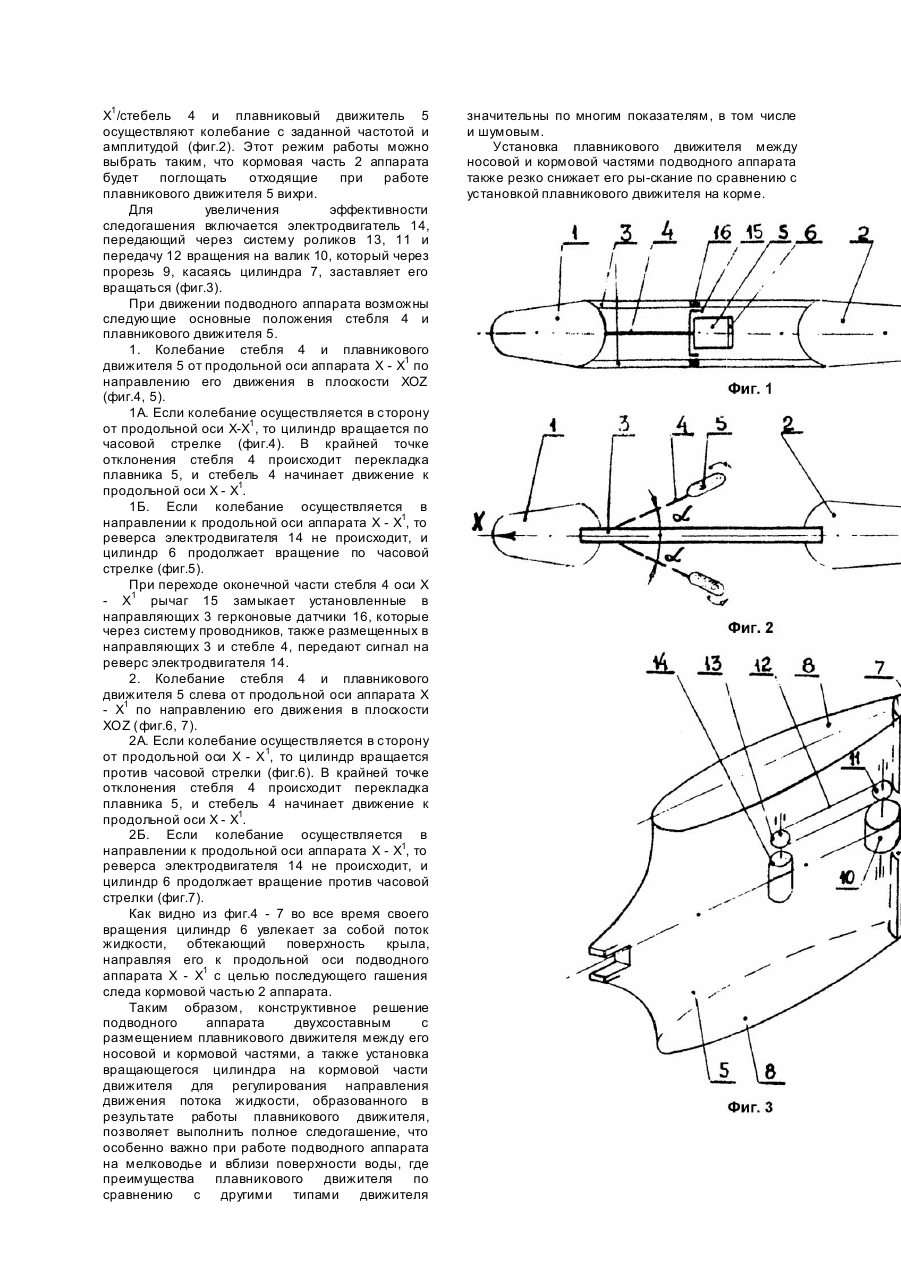
Изобретение относится к области судостроения и может быть использовано при конструировании подводных аппаратов. В технике известны многосоставные конструкции подводных аппаратов. Так, в патенте США №5105753, кл. B63G11/46, 1993, Бюл. №11, устройство содержит двухсоставной корпус с носовым и кормовым участками. В патенте Германии №301005, кл. B63G7/02, Бюл. №3, 1994, главный носитель имеет несколько вспомогательных носителей, снабженных сенсорами. Получили распространение также аппараты с вращающимися цилиндрическими поверхностями. В патенте СССР №2859, кл. B64C29/00, опубл. 30.04.27, с целью получения вертикального подъема и горизонтального перемещения используются вращательные цилиндры. В патенте СССР №19464, кл. B64C39/00, опубл. 28.02.31, для увеличения подъемной силы применяются вращающиеся конусообразные роторы круглого сечения. Система роторов в их сечении плоскостью, параллельной плоскости симметрии имеет профиль крыла и установлена под продольным углом. Авт. св. СССР №60430, кл. B64C23/02, опубл. 30.06.41, предлагает по размаху крыла установить диски. При движении крыла в воздухе и вращении дисков, расположенных на одном валу, поток воздуха, увлекаясь дисками, создает ускорение над крылом и торможение под ним, так как диски вращаются над крылом в сторону его острой кромки, а под крылом - в сторону от нее. Известно авт. св. СССР №504469, кл. B64C39/00, опубл. 25.02.76, в котором с целью повышения маневренности и устойчивости летательного аппарата в носовой и кормовой частях смонтированы блоки вращающихся пропеллеров волнового типа, приводящихся во вращение с помощью приводных устройств. За счет перекладки лопастей пропеллеров изменяют подъемную силу аппарата. Пропеллеры также обеспечивают устойчивость аппарата относительно его продольной оси. Патент Франции №2676032 кл. B63H9/06, Бюл. №10, 1993, предлагает конструкцию, представляющую собой гибкую оболочку с заслонками для перетекания воздуха от корытца профиля к его стенке. В описанных выше конструкциях вращающиеся цилиндры и диски обеспечивали в основном изменение скорости протекания воздуха над обтекаемой поверхностью, решая собственные, специфические для того или иного патента задачи. Наиболее близким по технической сущности к предлагаемому изобретению является авт. св. СССР №1544638, кл. B63H1/36, опубл. 23.02.90, Бюл. №7, в котором последний содержит упругие машущие крылья, шарнирно закрепленные на одном конце рычага, другой конец которого связан с приводом колебательного движения крыльев. Движитель снабжен механизмом перекладки крыльев. С целью повышения мореходных качеств судна привод выполнен таким образом, что колебания крыльев возможны в двух взаимно перпендикулярных плоскостях, а механизм перекладки крыльев осуществляет их перекладку на 180°. Это позволяет при расположении крыльев острой кромкой к аппарату частично гасить о корпус подводного аппарата отходящие при колебании плавников крылья. Недостатком этой конструкции является то, что при выполнении колебаний с большой амплитудой отходящие ви хри в месте перекладки крыльев на реверсе электропривода не достигают корпуса аппарата. Таким образом происходит только частичное гашение следа за плавниковым движителем. Задачей настоящего изобретения является полное гашение следа за плавниковым движителем подводного аппарата. Поставленная задача решается тем, что в подводном аппарате, содержащем корпус и плавниковый движитель, последний содержит цилиндр, размещенный в его кормовой части и соединенный посредством осей с шайбами, жестко закрепленными на торцевых поверхностях движителя, и касающийся своей боковой поверхностью валика, установленного в прорези кормовой части плавника, на одной оси с которым находится ролик, связанный передачей с роликом электродвигателя, вращательного движения, расположенном в теле плавникового движителя, причем корпус аппарата выполнен двухсоставным, - с носовой частью, в которой размещен электродвигатель колебательного движения со стеблем и плавником, и кормовой частью, соединенными между собой в вертикальной плоскости двумя направляющими. В отличие от прототипа изобретение "Аппарат с плавниковым движителем" обеспечивает гашение следа за плавниковым движителем при любой амплитуде и частоте его колебания и снижают рыскание аппарата по траектории его движения. При изучении других известных разработок в этой области признаки, отличающиеся от прототипа, не выявлены. Сущность изобретения "Аппарат с плавниковым движителем" поясняется чертежами фиг.1 - 7. Общий вид конструкции представлен на фиг.1(вид прямо) и фиг.2 (вид свер ху). Конструкция плавникового движителя показана на фиг.3. На фиг.4 и 5 даны схемы движения стебля и плавника справа от продольной оси подводного аппарата по ходу его движения, а на фиг.6 и 7 - схемы движения стебля и плавника слева от продольной оси подводного аппарата по ходу его движения. Аппарат с плавниковым движителем содержит носовую часть 1, в которой размещен электропривод колебательного движения (на фиг. не показан) и кормовую часть 2, соединенных верхними и нижними своими частями, направляющими 3, между которыми расположен стебель 4 и плавниковый движитель 5, имеющий, в кормовой своей части цилиндр 6, свободно проворачивающийся в осях 7, установленных на шайбах 8 с торцевых поверхностей плавникового движителя и касающийся своей боковой поверхностью через прорезь 9 валика 10, на оси которого имеется ролик 11, связанный передачей 12 с другим роликом 13 электродвигателя 14, установленного в теле плавникового движителя, реверс которого производится за счет рычага 15, установленного в оконечной части стебля, и герконов 16, встроенных в направляющие. Принцип действия устройства следующий. При движении подводного аппарата (направление показано вдоль продольной оси /X X1 /стебель 4 и плавниковый движитель 5 осуществляют колебание с заданной частотой и амплитудой (фиг.2). Этот режим работы можно выбрать таким, что кормовая часть 2 аппарата будет поглощать отходящие при работе плавникового движителя 5 вихри. Для увеличения эффективности следогашения включается электродвигатель 14, передающий через систему роликов 13, 11 и передачу 12 вращения на валик 10, который через прорезь 9, касаясь цилиндра 7, заставляет его вращаться (фиг.3). При движении подводного аппарата возможны следующие основные положения стебля 4 и плавникового движителя 5. 1. Колебание стебля 4 и плавникового движителя 5 от продольной оси аппарата X - X1 по направлению его движения в плоскости XOZ (фиг.4, 5). 1А. Если колебание осуществляется в сторону от продольной оси X-X1 , то цилиндр вращается по часовой стрелке (фиг.4). В крайней точке отклонения стебля 4 происходит перекладка плавника 5, и стебель 4 начинает движение к продольной оси X - X1. 1Б. Если колебание осуществляется в направлении к продольной оси аппарата X - X1, то реверса электродвигателя 14 не происходит, и цилиндр 6 продолжает вращение по часовой стрелке (фиг.5). При переходе оконечной части стебля 4 оси X - X1 рычаг 15 замыкает установленные в направляющих 3 герконовые датчики 16, которые через систему проводников, также размещенных в направляющих 3 и стебле 4, передают сигнал на реверс электродвигателя 14. 2. Колебание стебля 4 и плавникового движителя 5 слева от продольной оси аппарата X - X1 по направлению его движения в плоскости XOZ (фиг.6, 7). 2А. Если колебание осуществляется в сторону от продольной оси X - X1, то цилиндр вращается против часовой стрелки (фиг.6). В крайней точке отклонения стебля 4 происходит перекладка плавника 5, и стебель 4 начинает движение к продольной оси X - X1. 2Б. Если колебание осуществляется в направлении к продольной оси аппарата X - X1, то реверса электродвигателя 14 не происходит, и цилиндр 6 продолжает вращение против часовой стрелки (фиг.7). Как видно из фиг.4 - 7 во все время своего вращения цилиндр 6 увлекает за собой поток жидкости, обтекающий поверхность крыла, направляя его к продольной оси подводного аппарата X - X1 с целью последующего гашения следа кормовой частью 2 аппарата. Таким образом, конструктивное решение подводного аппарата двухсоставным с размещением плавникового движителя между его носовой и кормовой частями, а также установка вращающегося цилиндра на кормовой части движителя для регулирования направления движения потока жидкости, образованного в результате работы плавникового движителя, позволяет выполнить полное следогашение, что особенно важно при работе подводного аппарата на мелководье и вблизи поверхности воды, где преимущества плавникового движителя по сравнению с другими типами движителя значительны по многим показателям, в том числе и шумовым. Установка плавникового движителя между носовой и кормовой частями подводного аппарата также резко снижает его ры-скание по сравнению с установкой плавникового движителя на корме.
ДивитисяДодаткова інформація
Автори англійськоюPolischuk Serhii Volodymyrovych, Babenko Viktor Vitaliovych
Автори російськоюПолищук Сергей Владимирович, Бабенко Виктор Витальевич
МПК / Мітки
МПК: B63H 1/36
Мітки: плавцевим, рушієм, апарат
Код посилання
<a href="https://ua.patents.su/3-25799-aparat-z-plavcevim-rushiehm.html" target="_blank" rel="follow" title="База патентів України">Апарат з плавцевим рушієм</a>
Складений плавцевий рушій
Номер патенту: 25356
Опубліковано: 30.10.1998
Автори: Коробов Віталій Ілліч, Поліщук Сергій Володимирович, Бабенко Віктор Вітальович
МПК: B63H 1/36
Мітки: плавцевий, рушій, складений
Формула / Реферат:
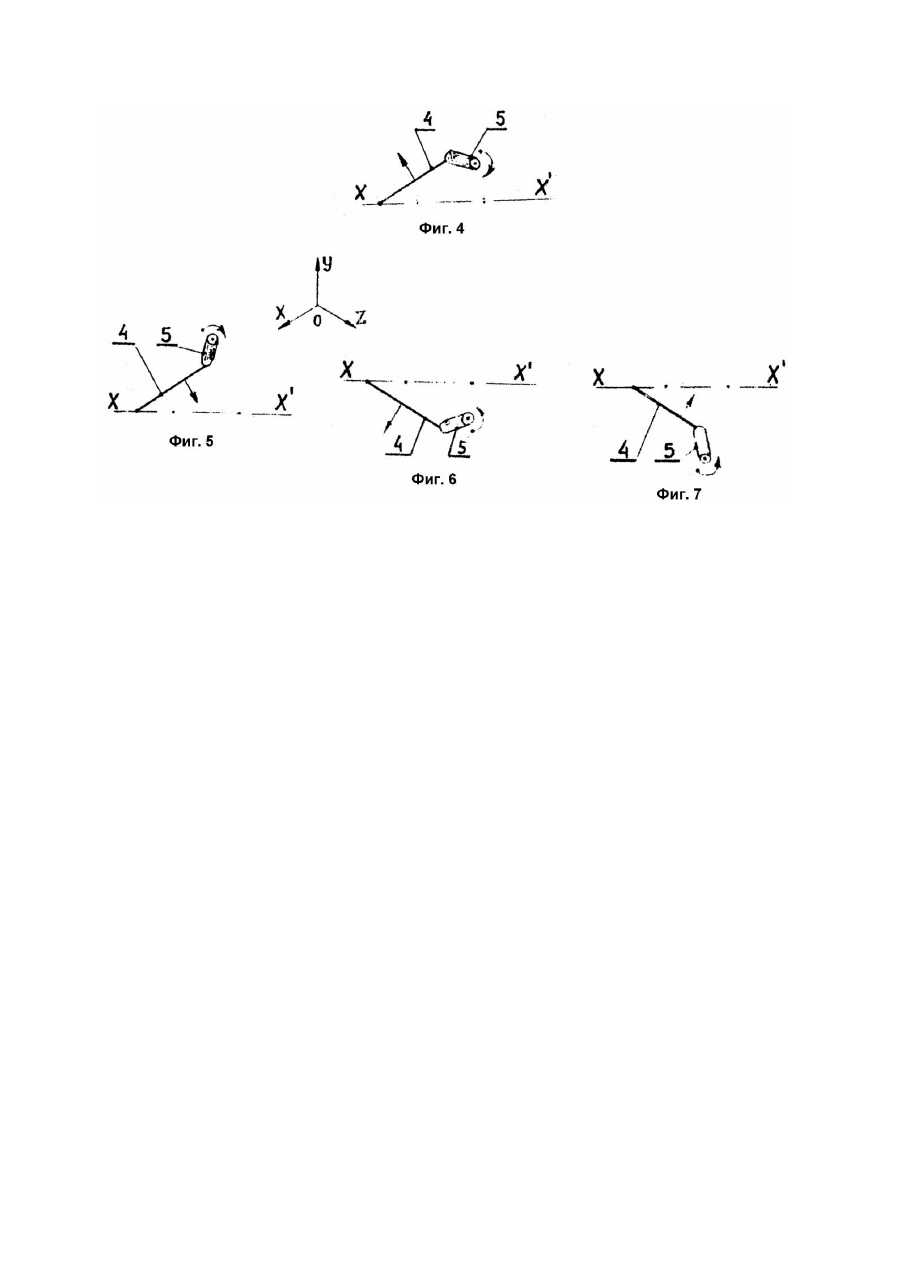
Составной плавниковый движитель, содержащий стебель со встроенным в нем электродвигателем и многосоставное крыло, отличающийся тем, что в передней части крыла расположены соленоиды с сердечником и перемычка, которая с помощью прорези соединена со средней частью крыла, которая в свою очередь содержит соленоиды с сердечником и перемычку, которая с помощью прорези соединена с задней частью крыла, а электродвигатель стебля своим валом жестко...
Апарат з плавцевими рушіями
Номер патенту: 25646
Опубліковано: 30.10.1998
Автори: Коробов Віталій Ілліч, Бабенко Віктор Вітальович, Поліщук Сергій Володимирович
МПК: B63H 1/36
Мітки: рушіями, апарат, плавцевими
Формула / Реферат:
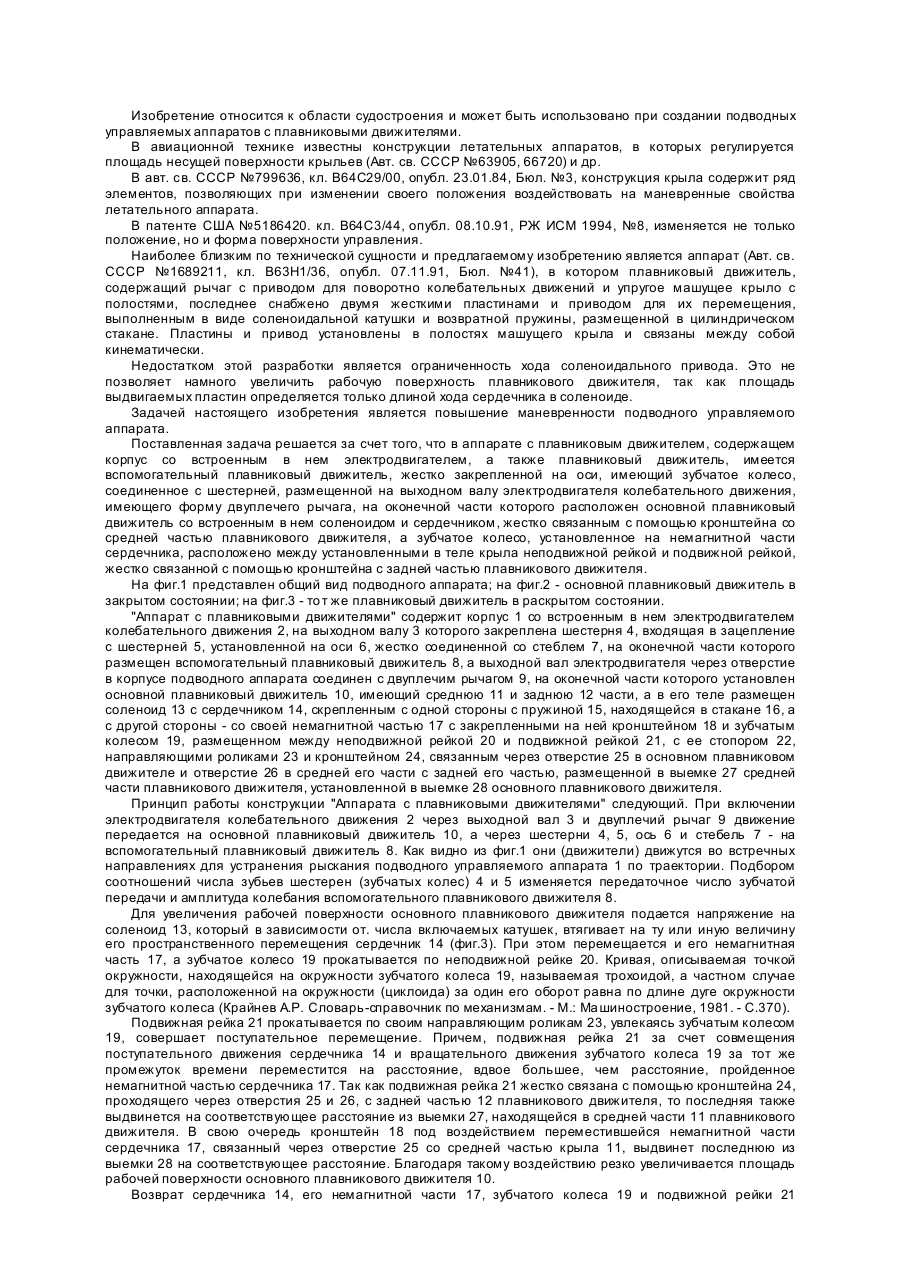
Аппарат с плавниковыми движителями, содержащий корпус со встроенным в нем электродвигателем, а также плавниковый движитель, отличающийся тем, что аппарат содержит вспомогательный плавниковый движитель, жестко закрепленный на оси, имеющей зубчатое колесо, соединенное с шестерней, размещенной на выходном валу электродвигателя колебательного движения, имеющего форму двуплечего рычага, на оконечной части которого расположен основной плавниковый...
Плавцевий рушій апарата
Номер патенту: 25355
Опубліковано: 30.10.1998
Автори: Бабенко Віктор Вітальович, Поліщук Сергій Володимирович, Коробов Віталій Ілліч
МПК: B63H 1/36
Мітки: апарата, рушій, плавцевий
Формула / Реферат:
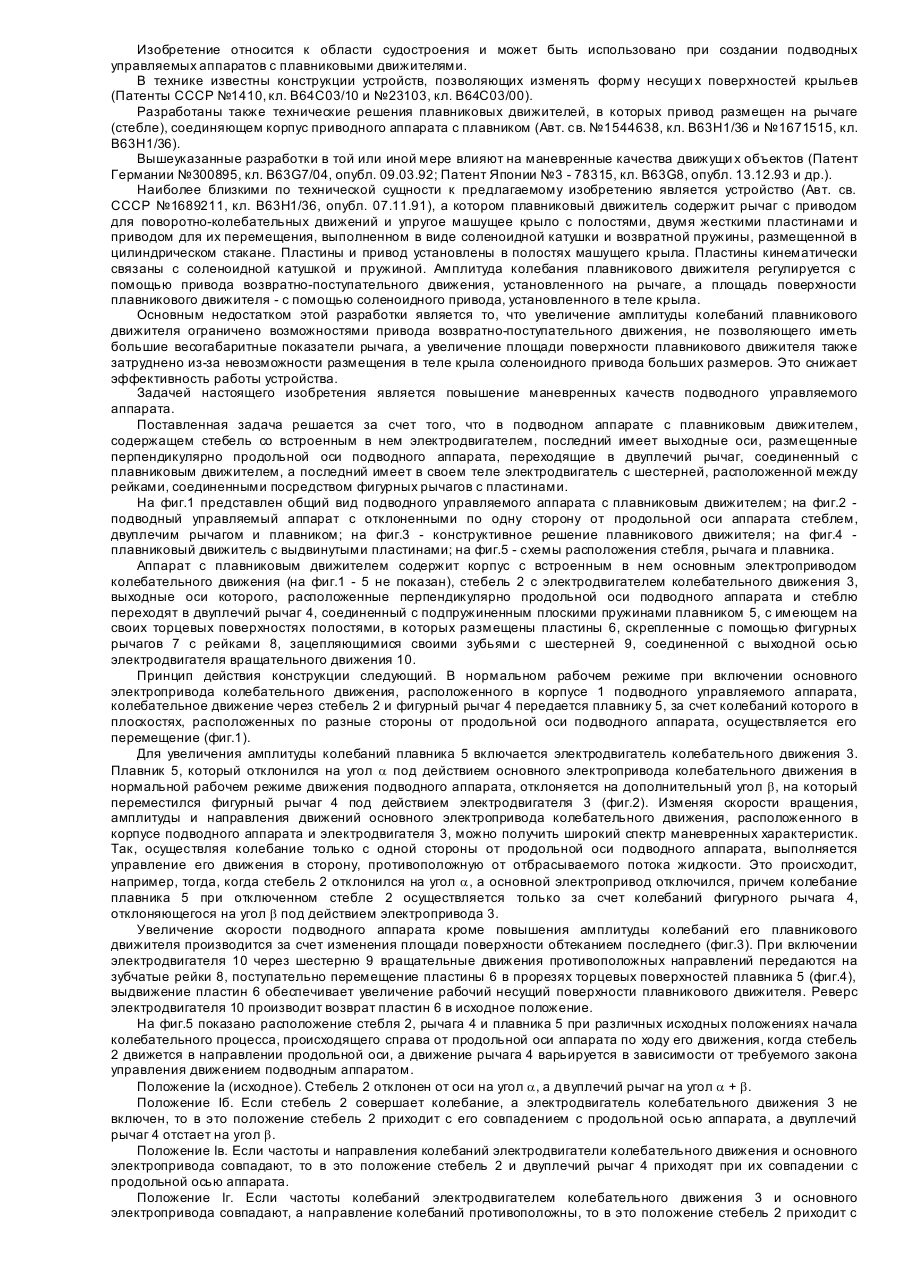
Плавниковый движитель аппарата, содержащий стебель со встроенным в нем электродвигателем, отличающийся тем, что последний имеет выходные оси, размещенные перпендикулярно продольной оси подводного аппарата, переходящие в двуплечий рычаг, соединенный с плавниковым движителем, а последний имеет в своем теле электродвигатель с шестерней, расположенной между рейками, соединенными посредством фигурных рычагов с пластинами.
Комбінований аеростатичний літальний апарат
Номер патенту: 22219
Опубліковано: 30.06.1998
Автори: Ударцев Євген Павлович, Ковальов Сергій Миколайович
МПК: B64B 1/40
Мітки: апарат, літальний, комбінований, аеростатичний
Формула / Реферат:
Комбинированный аэростатический летательный аппарат, содержащий корпус, в кормовой части которого установлены кили, отличающийся тем. что корпус выполнен в виде крыла с аэродинамической и геометрической круткой, на концах килей установлены двигатели и цельноповоротное горизонтальное оперение.
Висіваючий апарат
Номер патенту: 12678
Опубліковано: 28.02.1997
Автори: Слугінов Едуард Володимирович, Злобін Юліан Андрійович, Слугінов Петро Іванович, Слугінова Юлія Володимирівна, Слугінов Володимир Митрофанович
МПК: A01C 7/04
Мітки: апарат, висіваючий
Формула / Реферат:
(57) Высевающий аппарат, содержащий установленный в корпусе высевающий элемент с ячейками для семян, отличающийся тем, что внутренняя стенка корпуса и точка входного отверстия ячеек для семян, наиболее удаленная от продольной оси высевающего элемента, расположены в одной плоскости.
Попередній патент: Спосіб лікування відкритокутової глаукоми
Наступний патент: Спосіб підвищення пропускної здатності каналу зв’язку на базі послідовного інтерфейсу та пристрій для його реалізації
Випадковий патент: П'єзоелектричний трансформатор