Датчик кутової швидкості
Номер патенту: 2678
Опубліковано: 15.07.2004
Автори: Мурзаханов Олександр Валентинович, Шкляр Володимир Петрович, Шервашидзе Володимир Варламович, Самусь Андрій Ігорович

Формула / Реферат
Датчик кутової швидкості, що містить чутливий елемент з гіромотором і системою підвісу, датчик кутового положення, наприклад, індуктивного типу, блок управління рухом чутливого елементу, схему вимірювання кутової швидкості, який відрізняється тим, що до його складу введені обмежувач та інвертуючий інтегратор, причому вхід та вихід інвертуючого інтегратора з'єднані через обмежувач з виходом та входом схеми вимірювання кутової швидкості відповідно.
Текст
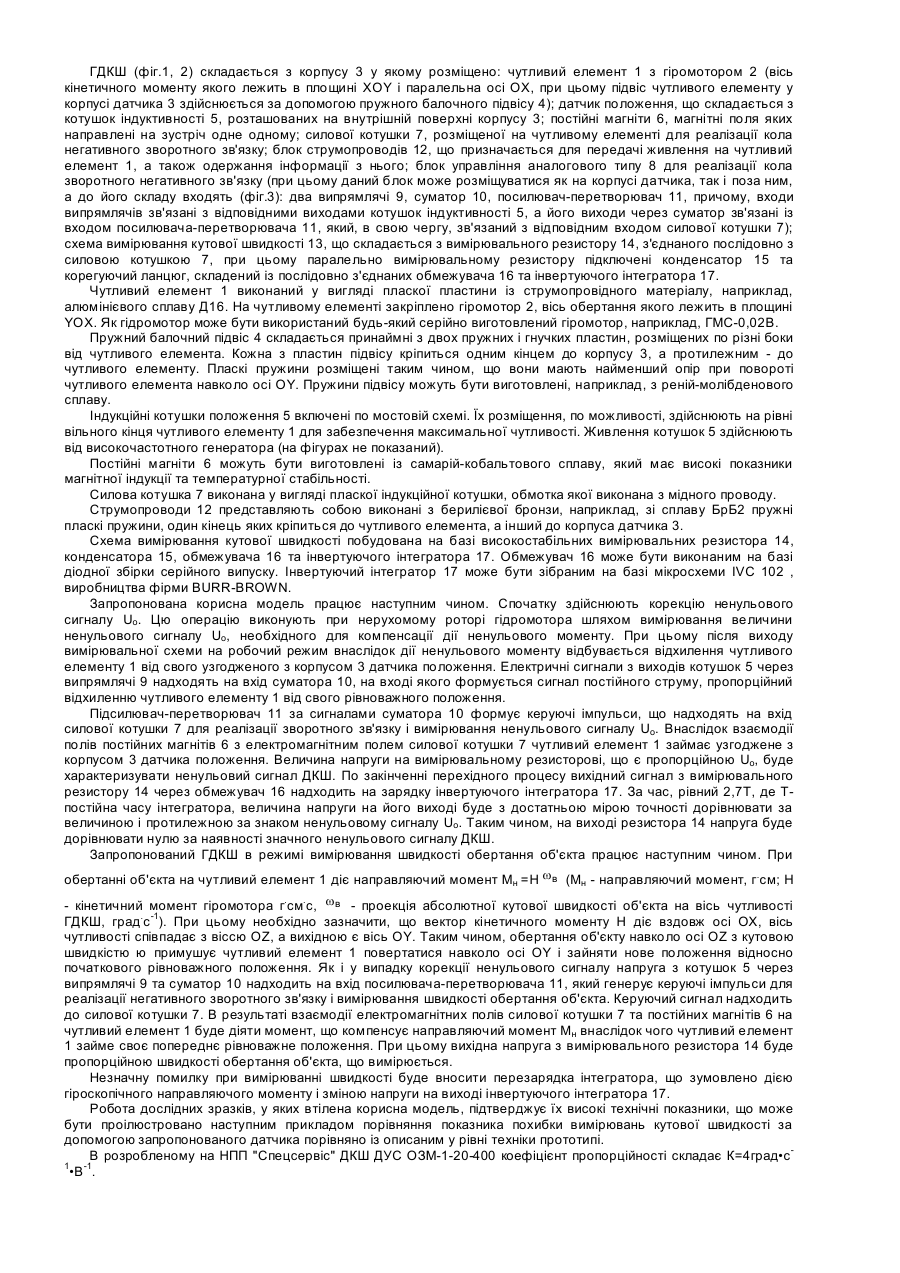
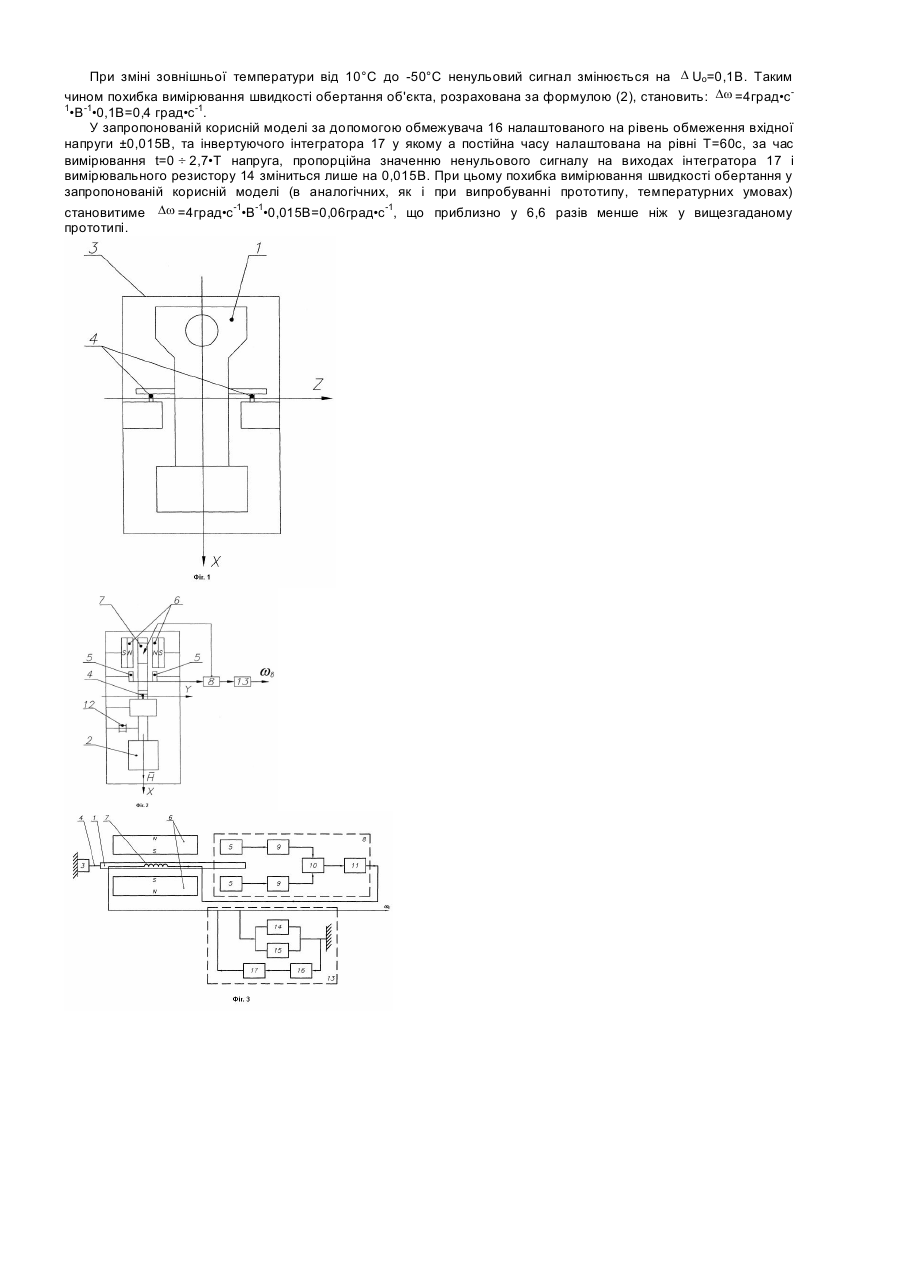
Корисна модель відноситься до вимірювальної техніки, зокрема до гіроскопічних датчиків кутової швидкості (ГДКШ) обертання об'єкта, і може бути використана у різноманітних інерційних приладах та системах для автономного орієнтування і навігації у тому числі транспортних засобів, а також в об'єктах робототехніки, у маркшейдерських роботах, для топогеодезичного забезпечення будівництва у тому числі тунелів, шахт, при укладці трубопроводів, при бурінні та обстеженні стану свердловин, для оцінки стану гальмівних систем різноманітних транспортних засобів, залізничних колій, а також у інших сферах промисловості, в тому числі при роботі вказаних приладів та систем в умовах з високим рівнем радіації, температури та навантажень. Останнім часом широкого використання набули ГДКШ компенсаційного типу із негативним зворотнім зв'язком. Вони являють собою автоматичні компенсаційні системи із негативним зворотнім зв'язком, в яких, як відомо, різко зменшується похибка, яка пов'язана безпосередньо з чутливим елементом, підвищується лінійність перетворення та розширюється діапазон вимірювань. Позитивними рисами цих датчиків є підвищені точність та лінійність перетворень, а також широкий динамічний діапазон вимірюваних кутових швидкостей. Найближчим аналогом запропонованої корисної моделі є відомий з літератури датчик кутової швидкості (див. деклараційний патент України на корисну модель №1207). Даний ГДКШ компенсаційного типу містить: чутливий елемент з промотором і системою підвісу; датчик кутового положення, наприклад, індуктивного типу, що складається з розміщених на нерухомому корпусі з обох боків від хвостовика чутливого елемента двох котушок індуктивності; блок управління рухом чутливого елементу та схему вимірювання кутової швидкості об'єкта. При цьому блок управління рухом чутливого елементу, що використовується для реалізації негативного зворотного зв'язку, складається з послідовно з'єднаних підсилювача-перетворювача та силової котушки, яку розміщено на чутливому елементі в полі дії магнітного поля, створеного двома зустрічне направленими постійними магнітами. Схема вимірювання кутової швидкості ГДКШ працює за принципом вимірювання постійної складової величини струму, необхідного для компенсації направляючого моменту чутливого елементу, який виникає при обертанні пристрою і складається із послідовно з'єднаних з силовою котушкою вимірювального резистора та конденсатора. Крім того у складі датчика передбачене коло, за допомогою якого, використовуючи резистор, перед початком експлуатації встановлюють ненульовий сигнал на виході вимірювальної системи за умов нерухомості об'єкту вимірювань. Вищезгаданий ГДКШ працює наступним чином. В результаті обертання об'єкта, на чутливий елемент датчика діє гіроскопічний направляючий момент, пропорційний кінетичному моментові гідромотора та проекції абсолютної кутової швидкості на вісь чутливості ГДКШ. Як наслідок цього, чутливий елемент здійснює поворот відносно свого рівноважного положення і з виходу датчика кутового положення знімають сигнал дисбалансу. Система негативного зворотного зв'язку обертає чутливий елемент до узгодженого з корпусом датчика положення, для чого докладає до нього момент Мв, рівний по величині, але протилежний за знаком направляючому моментові Мн. Використовуючи відомі з літератури формули (див. Воронков Н.Н., Ашимов Н.М., "Гироскопическое ориентирование", М.: "Недра", 1973, с. 35) обраховують значення наступних показників: (1), Mн = H ´ wв де: Мн - направляючий елемент, (гхсм); Н- кінетичний момент гіромотора, (гхсмхс); wв - проекція абсолютної кутової швидкості об'єкта на вісь чутливості ГДКШ, (градхс-1). Постійну складову напруги на виході ГДКШ, що є пропорційною проекції абсолютної кутової швидкості об'єкта на вісь чутливості ГДКШ wв розраховують за наступною формулою: wв =КхU (2), де: К - коефіцієнт пропорційності, (градхс-1 хВ-1); U - виміряна на виході напруга, (В). Слід відзначити, що вимірювання кутової швидкості у описаному ГДКШ здійснюється на фоні значних внутрішніх перешкод, які можуть набагато перевищувати корисний сигнал. Поява цих перешкод є наслідком недосконалості, а також нестабільності характеристик конструктивних елементів, викликаних дією різних факторів, наприклад, зміною температури навколишнього середовища, впливом механічних факторів, або електромагнітних полів, фізичне старіння тощо. Для зменшення величини помилок при використанні вищевказаного ГДКШ здійснюють спеціальні заходи, зокрема корекцію ненульового сигналу на етапі здачі ГДКШ підприємством-виготовлювачем. Однак даний процес має низьку ефективність, зумовлену здатністю до суттєвих змін величини ненульового сигналу у процесі експлуатації датчика, що приводить до значних помилок у вимірюванні кутової швидкості обертання об'єкта, і для їх усунення потребує ускладнення конструкції, збільшення габаритів та маси датчика і, як наслідок, підвищує його ціну. В основу запропонованої корисної моделі поставлено задачу зменшення впливу зміни ненульового сигналу на вимірювання кутової швидкості за допомогою ГДКШ компенсаційного типу. Поставлена задача вирішується шляхом удосконалення конструкції ГДКШ за допомогою включення до складу датчика обмежувача вхідного сигналу та інвертуючого інтегратора. У даній корисній моделі запропоновано з'єднати вихід та вхід схеми вимірювання швидкості через обмежувач та інвертуючий інтегратор. При цьому постійну часу інтегратора задають набагато більшою за постійну часу зміни корисної інформації (кутової швидкості обертання об'єкта), що призводить до істотного зменшення величини помилок, зумовлених дією низькочастотних перешкод, а саме, зміною навколишньої температури, зміщення центра ваги та ін. Враховуючи це рівень вхідної напруги обмежуючого елемента вибирають на декілька порядків меншим за величину вимірюваного сигналу, що дозволяє звести до мінімуму помилки, викликані побічною дією кола включеного негативного зворотного зв'язку в процесі вимірювання корисної інформації. На фіг.1 представлена принципова конструктивна схема датчика кутової швидкості у площині XOY. На фіг.2 - те саме у площині ZOX. На фіг.3 представлена загальна електрична схема датчика. ГДКШ (фіг.1, 2) складається з корпусу 3 у якому розміщено: чутливий елемент 1 з гіромотором 2 (вісь кінетичного моменту якого лежить в площині XOY і паралельна осі ОХ, при цьому підвіс чутливого елементу у корпусі датчика 3 здійснюється за допомогою пружного балочного підвісу 4); датчик положення, що складається з котушок індуктивності 5, розташованих на внутрішній поверхні корпусу 3; постійні магніти 6, магнітні поля яких направлені на зустріч одне одному; силової котушки 7, розміщеної на чутливому елементі для реалізації кола негативного зворотного зв'язку; блок струмопроводів 12, що призначається для передачі живлення на чутливий елемент 1, а також одержання інформації з нього; блок управління аналогового типу 8 для реалізації кола зворотного негативного зв'язку (при цьому даний блок може розміщуватися як на корпусі датчика, так і поза ним, а до його складу входять (фіг.3): два випрямлячі 9, суматор 10, посилювач-перетворювач 11, причому, входи випрямлячів зв'язані з відповідними виходами котушок індуктивності 5, а його виходи через суматор зв'язані із входом посилювача-перетворювача 11, який, в свою чергу, зв'язаний з відповідним входом силової котушки 7); схема вимірювання кутової швидкості 13, що складається з вимірювального резистору 14, з'єднаного послідовно з силовою котушкою 7, при цьому паралельно вимірювальному резистору підключені конденсатор 15 та корегуючий ланцюг, складений із послідовно з'єднаних обмежувача 16 та інвертуючого інтегратора 17. Чутливий елемент 1 виконаний у вигляді пласкої пластини із струмопровідного матеріалу, наприклад, алюмінієвого сплаву Д16. На чутливому елементі закріплено гіромотор 2, вісь обертання якого лежить в площині YOX. Як гідромотор може бути використаний будь-який серійно виготовлений гіромотор, наприклад, ГМС-0,02В. Пружний балочний підвіс 4 складається принаймні з двох пружних і гнучких пластин, розміщених по різні боки від чутливого елемента. Кожна з пластин підвісу кріпиться одним кінцем до корпусу 3, а протилежним - до чутливого елементу. Пласкі пружини розміщені таким чином, що вони мають найменший опір при повороті чутливого елемента навколо осі OY. Пружини підвісу можуть бути виготовлені, наприклад, з реній-молібденового сплаву. Індукційні котушки положення 5 включені по мостовій схемі. Їх розміщення, по можливості, здійснюють на рівні вільного кінця чутливого елементу 1 для забезпечення максимальної чутливості. Живлення котушок 5 здійснюють від високочастотного генератора (на фігурах не показаний). Постійні магніти 6 можуть бути виготовлені із самарій-кобальтового сплаву, який має високі показники магнітної індукції та температурної стабільності. Силова котушка 7 виконана у вигляді пласкої індукційної котушки, обмотка якої виконана з мідного проводу. Струмопроводи 12 представляють собою виконані зберилієвої бронзи, наприклад, зі сплаву БрБ2 пружні пласкі пружини, один кінець яких кріпиться до чутливого елемента, а інший до корпуса датчика 3. Схема вимірювання кутової швидкості побудована на базі високостабільних вимірювальних резистора 14, конденсатора 15, обмежувача 16 та інвертуючого інтегратора 17. Обмежувач 16 може бути виконаним на базі діодної збірки серійного випуску. Інвертуючий інтегратор 17 може бути зібраним на базі мікросхеми IVC 102 , виробництва фірми BURR-BROWN. Запропонована корисна модель працює наступним чином. Спочатку здійснюють корекцію ненульового сигналу Uo. Цю операцію виконують при нерухомому роторі гідромотора шляхом вимірювання величини ненульового сигналу Uo, необхідного для компенсації дії ненульового моменту. При цьому після виходу вимірювальної схеми на робочий режим внаслідок дії ненульового моменту відбувається відхилення чутливого елементу 1 від свого узгодженого з корпусом 3 датчика положення. Електричні сигнали з виходів котушок 5 через випрямлячі 9 надходять на вхід суматора 10, на вході якого формується сигнал постійного струму, пропорційний відхиленню чутливого елементу 1 від свого рівноважного положення. Підсилювач-перетворювач 11 за сигналами суматора 10 формує керуючі імпульси, що надходять на вхід силової котушки 7 для реалізації зворотного зв'язку і вимірювання ненульового сигналу Uo. Внаслідок взаємодії полів постійних магнітів 6 з електромагнітним полем силової котушки 7 чутливий елемент 1 займає узгоджене з корпусом 3 датчика положення. Величина напруги на вимірювальному резисторові, що є пропорційною Uo, буде характеризувати ненульовий сигнал ДКШ. По закінченні перехідного процесу вихідний сигнал з вимірювального резистору 14 через обмежувач 16 надходить на зарядку інвертуючого інтегратора 17. За час, рівний 2,7Т, де Тпостійна часу інтегратора, величина напруги на його виході буде з достатньою мірою точності дорівнювати за величиною і протилежною за знаком ненульовому сигналу Uo. Таким чином, на виході резистора 14 напруга буде дорівнювати нулю за наявності значного ненульового сигналу ДКШ. Запропонований ГДКШ в режимі вимірювання швидкості обертання об'єкта працює наступним чином. При обертанні об'єкта на чутливий елемент 1 діє направляючий момент Мн =Н wв (Мн - направляючий момент, г.см; Н - кінетичний момент гіромотора г.см.с, wв - проекція абсолютної кутової швидкості об'єкта на вісь чутливості ГДКШ, град.с-1). При цьому необхідно зазначити, що вектор кінетичного моменту Н діє вздовж осі ОХ, вісь чутливості співпадає з віссю OZ, а вихідною є вісь OY. Таким чином, обертання об'єкту навколо осі OZ з кутовою швидкістю ю примушує чутливий елемент 1 повертатися навколо осі OY і зайняти нове положення відносно початкового рівноважного положення. Як і у випадку корекції ненульового сигналу напруга з котушок 5 через випрямлячі 9 та суматор 10 надходить на вхід посилювача-перетворювача 11, який генерує керуючі імпульси для реалізації негативного зворотного зв'язку і вимірювання швидкості обертання об'єкта. Керуючий сигнал надходить до силової котушки 7. В результаті взаємодії електромагнітних полів силової котушки 7 та постійних магнітів 6 на чутливий елемент 1 буде діяти момент, що компенсує направляючий момент Мн внаслідок чого чутливий елемент 1 займе своє попереднє рівноважне положення. При цьому вихідна напруга з вимірювального резистора 14 буде пропорційною швидкості обертання об'єкта, що вимірюється. Незначну помилку при вимірюванні швидкості буде вносити перезарядка інтегратора, що зумовлено дією гіроскопічного направляючого моменту і зміною напруги на виході інвертуючого інтегратора 17. Робота дослідних зразків, у яких втілена корисна модель, підтверджує їх високі технічні показники, що може бути проілюстровано наступним прикладом порівняння показника похибки вимірювань кутової швидкості за допомогою запропонованого датчика порівняно із описаним у рівні техніки прототипі. В розробленому на НПП "Спецсервіс" ДКШ ДУС ОЗМ-1-20-400 коефіцієнт пропорційності складає К=4гpaд•c1 -1 •B . При зміні зовнішньої температури від 10°С до -50°С ненульовий сигнал змінюється на D Uo=0,1B. Таким чином похибка вимірювання швидкості обертання об'єкта, розрахована за формулою (2), становить: Dw =4гpaд•c1 •B-1•0,1B=0,4 град•с-1. У запропонованій корисній моделі за допомогою обмежувача 16 налаштованого на рівень обмеження вхідної напруги ±0,015В, та інвертуючого інтегратора 17 у якому а постійна часу налаштована на рівні Т=60с, за час вимірювання t=0 ¸ 2,7•T напруга, пропорційна значенню ненульового сигналу на виходах інтегратора 17 і вимірювального резистору 14 зміниться лише на 0,015В. При цьому похибка вимірювання швидкості обертання у запропонованій корисній моделі (в аналогічних, як і при випробуванні прототипу, температурних умовах) становитиме Dw =4гpaд•c-1•B-1•0,015B=0,06град•с-1, що приблизно у 6,6 разів менше ніж у вищезгаданому прототипі.
ДивитисяДодаткова інформація
МПК / Мітки
МПК: G01P 9/00
Мітки: швидкості, кутової, датчик
Код посилання
<a href="https://ua.patents.su/3-2678-datchik-kutovo-shvidkosti.html" target="_blank" rel="follow" title="База патентів України">Датчик кутової швидкості</a>
Спосіб та пристрій для вимірювання кутової швидкості
Номер патенту: 61044
Опубліковано: 15.10.2003
Автори: Шервашидзе Володимир Варламович, Леоненко Костянтин Миколайович, Мурзаханов Олександр Валентинович
МПК: G01P 9/00
Мітки: спосіб, пристрій, вимірювання, кутової, швидкості
Формула / Реферат:
1. Спосіб для вимірювання кутової швидкості (), який полягає у тому, що подають керуючий сигнал на блок живлення гіроскопічного датчика кутової швидкості для подачі напруги, необхідної для розкручування гіромотора до його виходу на стаціонарний режим обертання, на виході датчика вимірюють величину напруги при даному напрямку обертання ротора гіромотора (U+), подають...
Датчик кутової швидкості
Номер патенту: 2109
Опубліковано: 15.10.2003
Автори: Леоненко Костянтин Миколайович, Мурзаханов Олександр Валентинович, Шервашидзе Володимир Варламович
МПК: G01P 11/00, G01P 9/00
Мітки: швидкості, кутової, датчик
Формула / Реферат:
1. Датчик кутової швидкості, що містить розміщений за допомогою гнучкого підвісу чутливий елемент з гіромотором, датчик положення, коло зворотного зв'язку, схему визначення показника кутової швидкості, при цьому компенсаційна котушка силового перетворювача кола зворотного зв'язку встановлена на чутливому елементі між розміщеними від неї із зазором плоскими постійними магнітами із зустрічною орієнтацією магнітних полів, а коло зворотного...
Датчик кутової швидкості та система його віброзахисту
Номер патенту: 1207
Опубліковано: 15.04.2002
Автори: Шервашидзе Володимир Варлаамович, Олексієнко Микола Петрович, Гаврилюк Володимир Леонідович, Гуменюк Володимир Григорович, Шкляр Володимир Петрович, Леоненко Сергій Миколайович, Васильєв Володимир Леонідович
МПК: G01C 19/00, G01P 9/00
Мітки: швидкості, датчик, віброзахисту, система, кутової
Формула / Реферат:
1. Датчик кутової швидкості, який містить розміщений за допомогою підвісу чутливий елемент з гіромотором, датчик положення, коло зворотного зв'язку та схему визначення показника кутової швидкості, який відрізняється тим, що чутливий елемент підвішено у корпусі за допомогою гнучкого підвісу, гіромотор встановлено на чутливому елементі так, що вісь його обертання направлена перпендикулярно до осі, по якій згинається підвіс, і паралельно з віссю...
Спосіб вимірювання кутової швидкості, пристрій для його здійснення та блок обробки диференційних сигналів для пристрою
Номер патенту: 61160
Опубліковано: 17.11.2003
Автори: Шкляр Володимир Петрович, Гаврилюк Володимир Леонідович, Леоненко Сергій Миколайович, Шервашидзе Володимир Варлаамович, Васильєв Володимир Леонідович, Олексієнко Микола Петрович, Гуменюк Володимир Григорович
Мітки: здійснення, диференційних, швидкості, сигналів, спосіб, пристрій, вимірювання, обробки, блок, кутової, пристрою
Формула / Реферат:
1. Спосіб вимірювання кутової швидкості, за яким визначають переміщення чутливого елемента з гіромотором, який розміщують на об'єкті, кутову швидкість якого виміряють, величину переміщення перетворюють в електричний сигнал, на основі якого формують компенсаційу силу, пропорційну кутовій швидкості вказаного об'єкта, і під впливом якої чутливий елемент повертається у зрівноважене положення, по величині якої визначають величину кутової...
Аналоговий датчик кутової швидкості
Номер патенту: 22701
Опубліковано: 07.04.1998
Автори: Кухарчук Василь Васильович, Кучерук Володимир Юрійович, Михалевич Володимир Маркусович, Кулаков Павло Ігорович, Поджаренко Володимир Олександрович, Поджаренко Андрій Володимирович
МПК: G01P 3/42
Мітки: кутової, аналоговий, швидкості, датчик
Формула / Реферат:
Аналоговый датчик угловой скорости, содержащий вал, модулятор светового потока в виде диска, связанный с валом, источник света расположенный перед модулятором, линейный фотоприемник, расположенный напротив источника света по другую сторону модулятора, диафрагму, установленную перед линейным фотоприемником, отличающийся тем, что диафрагма имеет прорезь, форма которой ограничена двумя лучами, которые начинаются в центре модулятора светового...
Попередній патент: Дозатор ваговий автоматичний
Наступний патент: Пробка для пляшки з харчовою рідиною
Випадковий патент: Спосіб одержання полімерної мембрани для визначення токсинів у водних розчинах