Датчик кутової швидкості
Номер патенту: 2109
Опубліковано: 15.10.2003
Автори: Мурзаханов Олександр Валентинович, Шервашидзе Володимир Варламович, Леоненко Костянтин Миколайович
Формула / Реферат
1. Датчик кутової швидкості, що містить розміщений за допомогою гнучкого підвісу чутливий елемент з гіромотором, датчик положення, коло зворотного зв'язку, схему визначення показника кутової швидкості, при цьому компенсаційна котушка силового перетворювача кола зворотного зв'язку встановлена на чутливому елементі між розміщеними від неї із зазором плоскими постійними магнітами із зустрічною орієнтацією магнітних полів, а коло зворотного зв'язку містить два активні випрямлячі, кожен з яких має два відповідних входи, причому прямий вхід першого випрямляча з'єднаний із виводом першої котушки індуктивності диференційного датчика положення чутливого елемента, а інший вхід першого випрямляча з'єднаний із виводом другої котушки вказаного датчика положення, прямий вхід другого випрямляча з'єднаний з виводом другої котушки індуктивності, а інший вхід другого випрямляча з'єднаний із виводом першої котушки індуктивності диференційного датчика положення, виводи від вказаних випрямлячів з'єднані із відповідними входами суматора, який відрізняється тим, що гіромотор встановлено на чутливому елементі так, що вісь його обертання направлена перпендикулярно до осі, по якій згинається підвіс, і до осі симетрії чутливого елемента.
2. Датчик за п. 1, який відрізняється тим, що до схеми визначення показника кутової швидкості входить вимірювальний резистор, з'єднаний із входом до буферного підсилювача, який має коло для встановлення необхідного масштабу сигналу на виході датчика та коло для встановлення нульового сигналу на виході буферного підсилювача при відсутності впливу на чутливий елемент.
3. Датчик за п. 1 або 2, який відрізняється тим, що чутливий елемент закріплено на підвісі, який складається принаймні з пари пружних і гнучких пластинок, розміщених по різні боки чутливого елемента, кожна з яких утримується за кінці між двома паралельними пластинами, одна з яких прикріплена до корпуса датчика, а інша своїм протилежним кінцем - до чутливого елемента.
4. Датчик за будь-яким з попередніх пунктів, який відрізняється тим, що компенсаційна котушка магнітоелектричного силового перетворювача розміщена на чутливому елементі у заглибленні так, що вона знаходиться на одному рівні із зовнішньою поверхнею чутливого елемента.
5. Датчик за будь-яким з попередніх пунктів, який відрізняється тим, що підвіс виготовлено з міцного та пружного матеріалу, зокрема з реній-молібденового сплаву.
6. Датчик за будь-яким з попередніх пунктів, який відрізняється тим, що чутливий елемент виготовлено з струмопровідного матеріалу.
7. Датчик за будь-яким з попередніх пунктів, який відрізняється тим, що плоскі постійні магніти виготовлені з матеріалу з високими магнітними властивостями, стабільними в широкому діапазоні температур, зокрема з самарій-кобальтового сплаву.
8. Датчик за будь-яким з попередніх пунктів, який відрізняється тим, що датчик положення розміщено на рівні вільного кінця чутливого елемента.
9. Датчик за будь-яким з попередніх пунктів, який відрізняється тим, що вказаний підвіс чутливого елемента закріплено на корпусі через перехідник з принаймні трьома пружними балочками, розміщеними принаймні в двох паралельних з вимірювальною віссю датчика площинах, протилежні кінці яких жорстко защемлені на корпусі та на перехіднику, причому пружність балочок перевищує пружність підвісу чутливого елемента.
10. Датчик за будь-яким з попередніх пунктів, який відрізняється тим, що на корпусі датчика біля центра ваги чутливого елемента паралельно з вимірювальною віссю, встановлені обмежувачі.
11. Датчик за будь-яким з попередніх пунктів, який відрізняється тим, що у чутливому елементі вздовж його осі симетрії та перпендикулярно до осі, по якій згинається підвіс, виконане заглиблення, а на корпусі датчика - відповідний виступ.
12. Датчик за будь-яким з попередніх пунктів, який відрізняється тим, що у чутливому елементі вздовж осі, по якій згинається підвіс, та перпендикулярно до осі симетрії чутливого елемента, виконане заглиблення, а на корпусі датчика - відповідний виступ.
Текст
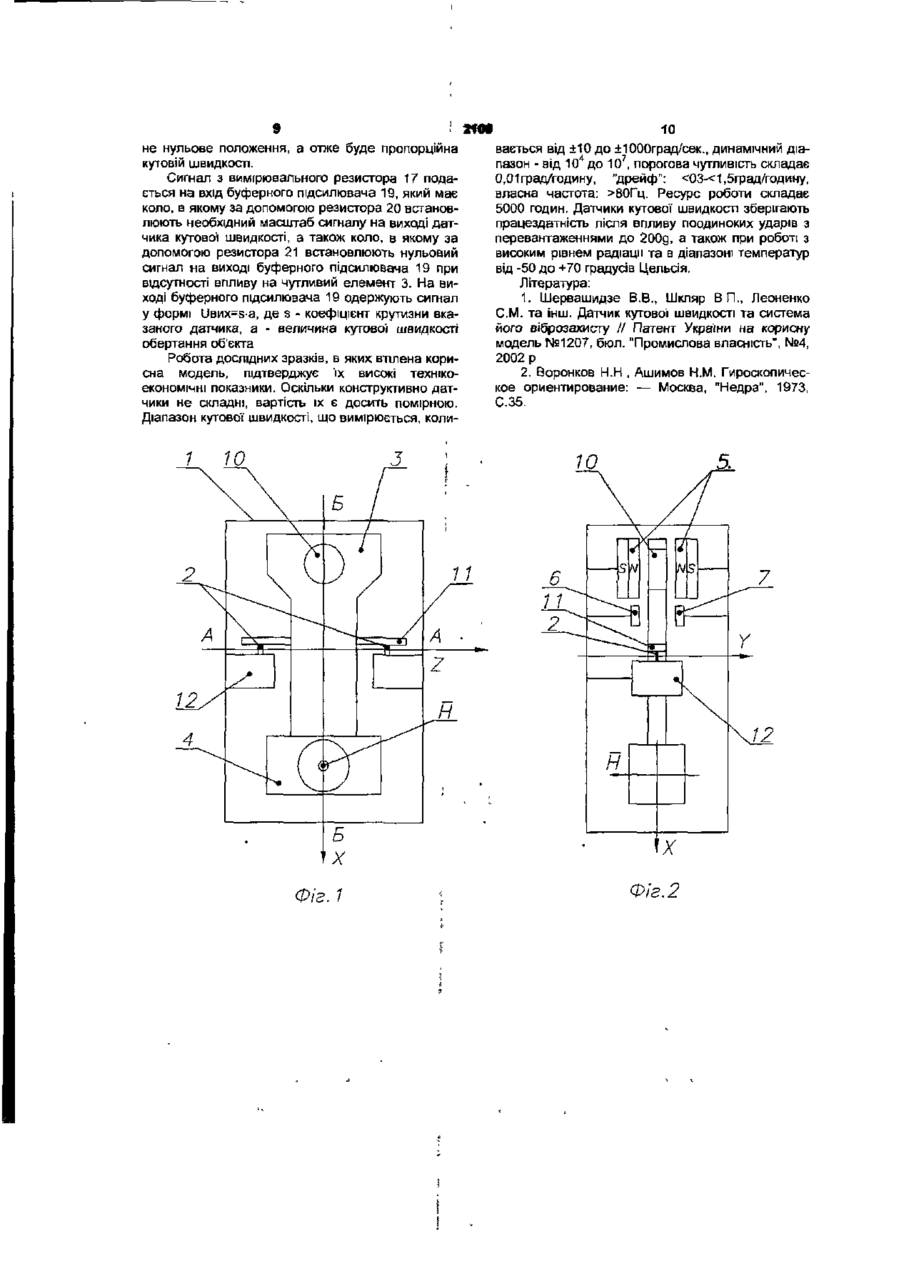
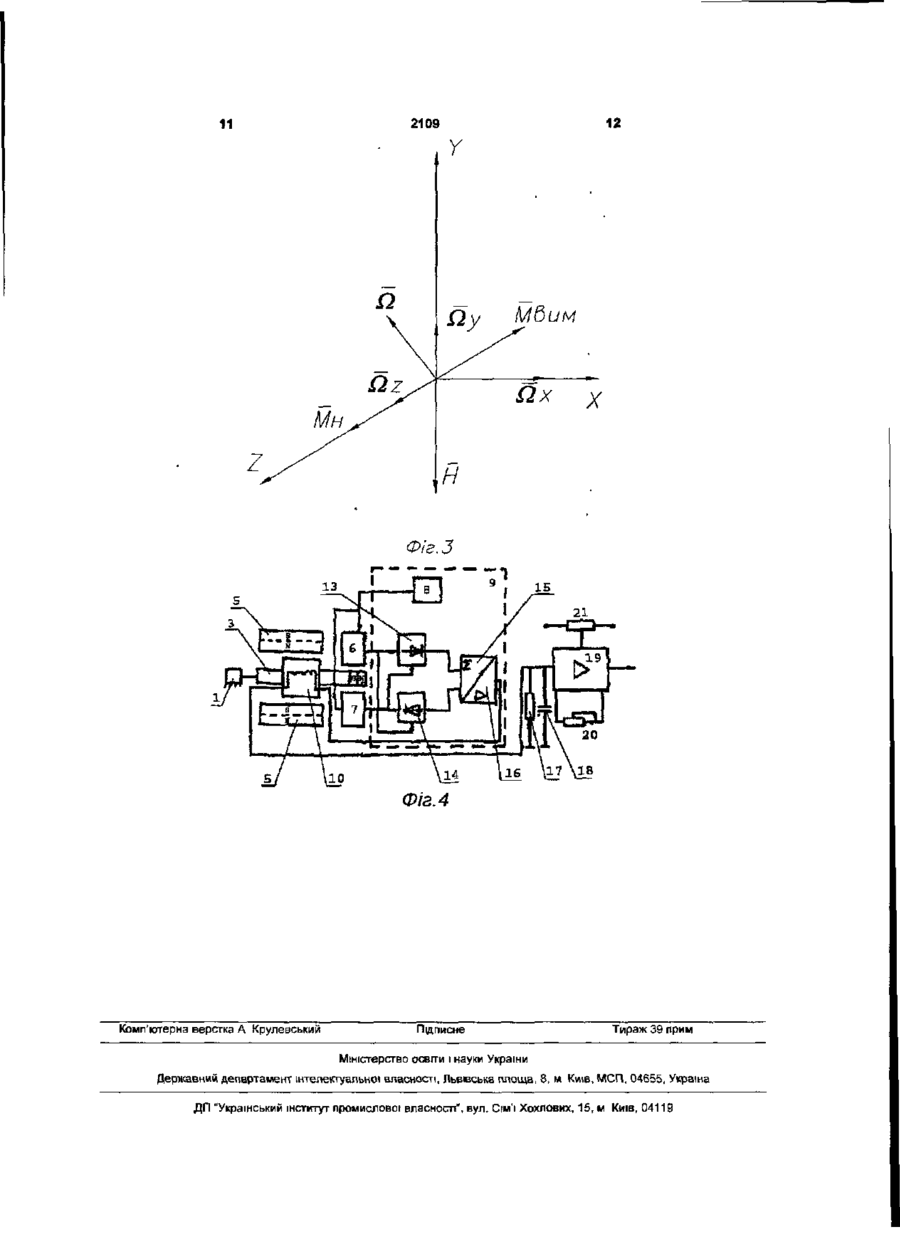
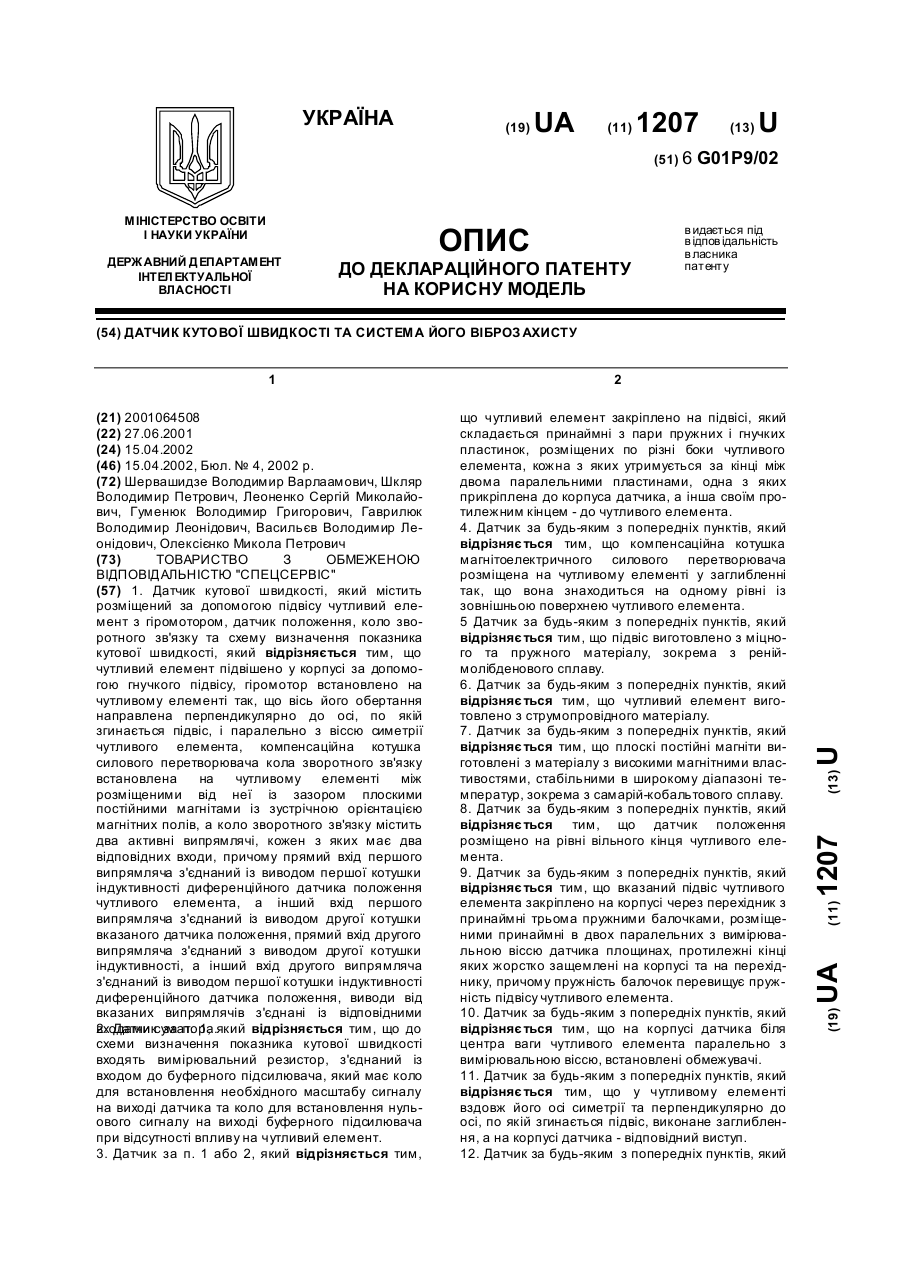
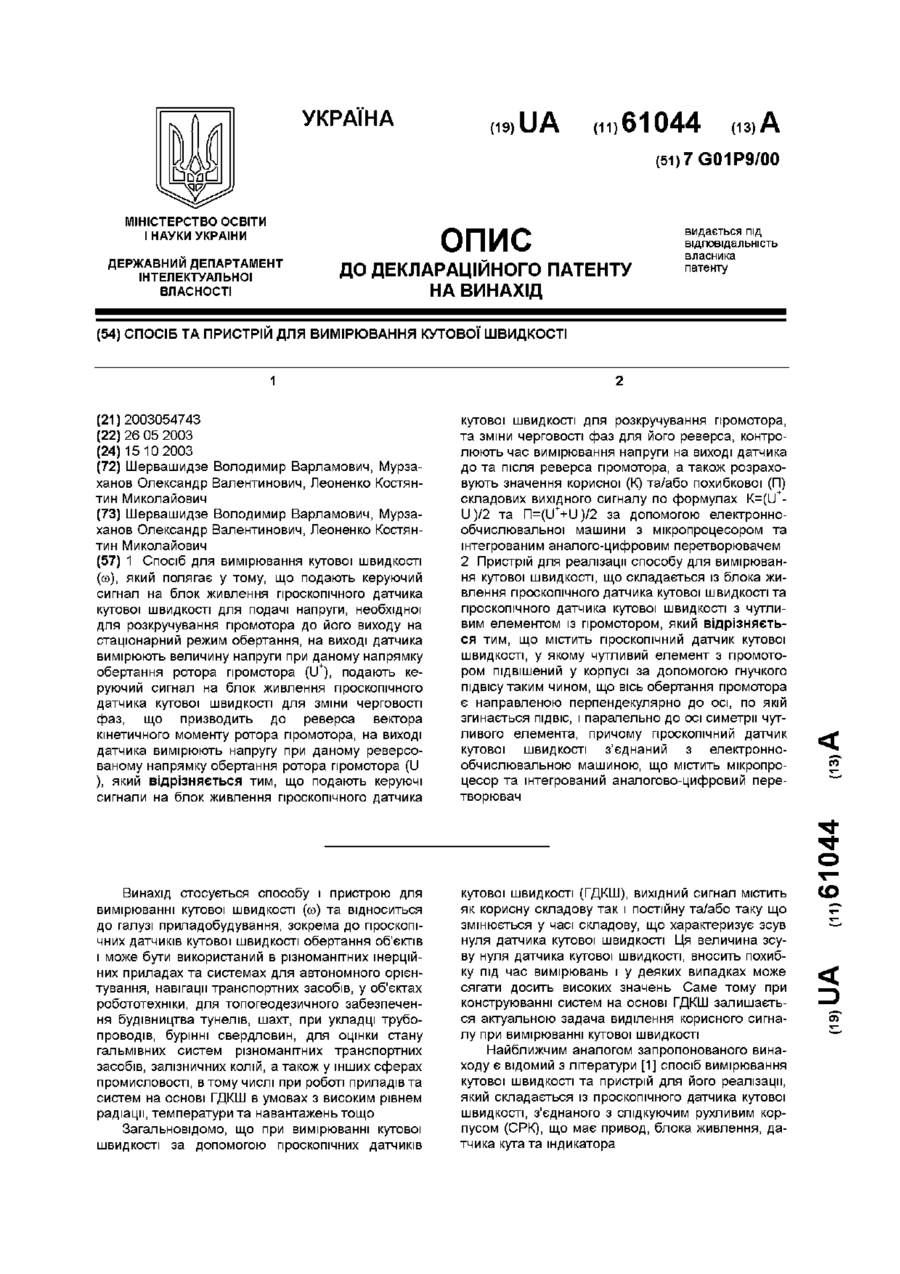
1 Датчик кутової швидкості, що містить розміщений за допомогою гнучкого підвісу чутливий елемент з промотором, датчик положення, коло зворотного зв'язку, схему визначення показника кутової швидкості, при цьому компенсаційна котушка силового перетворювача кола зворотного зв'язку встановлена на чутливому елементі між розміщеними від неї із зазором плоскими постійними магнітами із зустрічною орієнтацією магнітних полів, а коло зворотного зв'язку містить два активні випрямлячі, кожен з яких має два ВІДПОВІДНИХ входи, причому прямий вхід першого випрямляча з'єднаний із виводом першої котушки індуктивності диференційного датчика положення чутливого елемента, а інший вхід першого випрямляча з'єднаний із виводом другої котушки вказаного датчика положення, прямий вхід другого випрямляча з'єднаний з виводом другої котушки індуктивності, а інший вхід другого випрямляча з'єднаний із виводом першої котушки індуктивності диференційного датчика положення, виводи від вказаних випрямлячів з'єднані із ВІДПОВІДНИМИ входами суматора, який відрізняється тим, що промотор встановлено на чутливому елементі так, що вісь його обертання направлена перпендикулярно до осі, по якій згинається ПІДВІС, І ДО ОСІ симетрії чутливого елемента 2 Датчик за п 1, який відрізняється тим, що до схеми визначення показника кутової швидкості входить вимірювальний резистор, з'єднаний із входом до буферного підсилювача, який має коло для встановлення необхідного масштабу сигналу на виході датчика та коло для встановлення нульового сигналу на виході буферного підсилювача при відсутності впливу на чутливий елемент 3 Датчик за п 1 або 2, який відрізняється тим, що чутливий елемент закріплено на ПІДВІСІ, ЯКИЙ складається принаймні з пари пружних і гнучких пластинок, розміщених по різні боки чутливого елемента, кожна з яких утримується за КІНЦІ МІЖ двома паралельними пластинами, одна з яких прикріплена до корпуса датчика, а інша своїм протилежним кінцем - до чутливого елемента 4 Датчик за будь-яким з попередніх пунктів, який відрізняється тим, що компенсаційна котушка магнітоелектричного силового перетворювача розміщена на чутливому елементі у заглибленні так, що вона знаходиться на одному рівні із зовнішньою поверхнею чутливого елемента 5 Датчик за будь-яким з попередніх пунктів, який відрізняється тим, що підвіс виготовлено з міцного та пружного матеріалу, зокрема з реніймолібденового сплаву 6 Датчик за будь-яким з попередніх пунктів, який відрізняється тим, що чутливий елемент виготовлено з струмопровщного матеріалу 7 Датчик за будь-яким з попередніх пунктів, який відрізняється тим, що плоскі ПОСТІЙНІ магніти виготовлені з матеріалу з високими магнітними властивостями, стабільними в широкому діапазоні температур, зокрема з самарій-кобальтового сплаву 8 Датчик за будь-яким з попередніх пунктів, який відрізняється тим, що датчик положення розміщено на рівні вільного кінця чутливого елемента 9 Датчик за будь-яким з попередніх пунктів, який відрізняється тим, що вказаний ПІДВІС чутливого елемента закріплено на корпусі через перехідник з принаймні трьома пружними балочками, розміщеними принаймні в двох паралельних з вимірювальною віссю датчика площинах, протилежні кінці яких жорстко защемлені на корпусі та на перехіднику, причому пружність балочок перевищує пружність підвісу чутливого елемента 10 Датчик за будь-яким з попередніх пунктів, який відрізняється тим, що на корпусі датчика біля центра ваги чутливого елемента паралельно з вимірювальною віссю, встановлені обмежувачі 11 Датчик за будь-яким з попередніх пунктів, який відрізняється тим, що у чутливому елементі вздовж його осі симетри та перпендикулярно до осі, по якій згинається підвіс, виконане заглиблення, а на корпусі датчика - ВІДПОВІДНИЙ виступ 12 Датчик за будь-яким з попередніх пунктів, який відрізняється тим, що у чутливому елементі вздовж осі, по якій згинається ПІДВІС, та перпендикулярно до осі симетрії чутливого елемента, О) о З 2109 виконане заглиблення, а на корпусі датчика - відповідний виступ Винахід віднесеться до вимірювальної техніки, зокрема до гіроскопічних датчиків кутової швидкості обертання об'єкта, і може бути використаний в різноманітних інерційних приладах та системах для автономного орієнтування та навігації транспортних засобів, а також в об'єктах робототехніки, для топогеодезичного забезпечення будівництва тунелів, шахт, при укладці трубопроводів, бурінні свердловин, для оцінки стану гальмівних систем різноманітних транспортних засобів, залізничних колій, а також у інших сферах промисловості, в тому числі при роботі вказаних приладів та систем в умовах з високим рівнем радіації, температури та навантажень. В сучасних умовах широко використовують датчики кутової швидкості компенсаційного типу. Вони являють собою автоматичні компенсаційні системи із негативним зворотнім зв'язком, в яких, як відомо, різко зменшується похибка, яка пов'язана безпосередньо з чутливим елементом, підвищується лінійність перетворення та розширюється діапазон вимірювань. Найближчим аналогом запропонованого винаходу є датчик кутової швидкості описаний у патенті України на корисну модель UA 1207, G01P9/02, 2002, який, зокрема, включає розміщений за допомогою пружного і гнучкого підвісу чутливий елемент з промотором, при цьому промотор встановлено на чутливому елементі таким чином, що вісь обертання промотору є направленою перпендикулярно до осі, по якій згинається підвіс, і паралельно до осі симетрії чутливого елемента. Недоліком вищезазначеного пристрою є неможливість одночасного використання у вимірювальному приладі, наприклад, інклінометрі, трьох датчиків кутової швидкості з трьома взаємоперпендикулярними осями чутливості у тому випадку, коли для подібного приладу існує обмеження за габаритами, наприклад, при застосуванні у трубопроводах, або свердловинах певного діаметру. Метою винаходу є створення надійного, конструктивно простого, чутливого датчика для вимірювання кутової швидкості, вісь чутливості котрого була б перпендикулярною до осі симетрії чутливого елементу. Дана мета досягається створенням датчика кутової швидкості до якого входять чутливий елемент з гідромотором, датчик положення, коло зворотного зв'язку та схема визначення показника кутової швидкості Чутливий елемент закріплено у корпусі за допомогою гнучкого підвісу, компенсаційна котушка силового перетворювача кола зворотного зв'язку встановлена на чутливому елементі між розміщеними від неї із зазором плоскими постійними магнітами із зустрічною орієнтацією магнітних полів Чутливий елемент з промотором закріплено у корпусі на підвісі, який складається принаймні з пари пругких і гнучких пластинок, розміщених по різні боки від чутлирого елемента, кожна з яких утримується за кінці між двома паралельними пластинами, одна з яких кріпиться до корпуса датчика, а інша - до чутливого елемента. Підвіс чутливого елемента закріплений в корпусі через пєрехідник з розміщеними паралельно до вимірювальної вісі датчика принаймні трьома пружними та гнучкими балочками, розміщеними принаймні в двох площинах та жорстко закріплених на корпусі і на перехщнику, причому пружність балочок повинна перевищувати пружність підвісу. Таке розміщення та властивості балочок дозволяють перехіднику переміщуватися у датчику вздовж вимірювальної вісі. Для обмеження переміщення чутливого елемента в площині XOZ застосовані обмежувачі: вздовж вісі Z, для чого у чутливому елементі біля його центра ваги та вздовж ВІСІ X датчика {паралельно з віссю симетрії Б-Б чутливого елемента та перпендикулярно до вісі А-А, по якій згинається підвіс) зроблене заглиблення, а на корпусі датчика - відповідний виступ, а також вздовж вісі X датчика, для чого біля центра ваги чутливого елемента перпендикулярно до вісі симетрії Б-Б чутливого елемента, (його поздовжньої вісі) та паралельно з віссю А-А, по якій згинається підвіс, зроблене вздовж ВІСІ Z датчика заглиблення, а на корпусі датчика - відповідний виступ. Окрім того, на корпусі вздовж вимірювальної вісі Y датчика встановлені обмежувачі. Така система забезпечує віброзахист від впливу деформаційних сил на датчик кутової швидкості з будь-якого напрямку. Компенсаційна котушка магнітоелектричного силового перетворювача розміщена на чутливому елементі у заглибленні так, що вона знаходиться на одному рівні із зовнішньою поверхнею чутливого елемента. Підвіс виготовлено з міцного та пружного матеріалу, зокрема з реній-молібденового сплаву, а чутливий елемент - з струмопровідного матеріалу. Плоскі ПОСТІЙНІ магніти виготовлені з матеріалу з високими магнітними властивостями, стабільними в широкому діапазоні температур, зокрема з самарій-кобальтового сплаву. Датчик положення розміщено на рівні вільного кінця чутливого елемента. Коло зворотного зв'язку містить два активні випрямляча, кожен з яких має два ВІДПОВІДНИХ входи, причому прямий вхід першого випрямляча з'єднаний із виводом від першої котушки індуктивності диференційного датчика положення чутливого елемента, а інший вхід першого випрямляча з'єднаний з виводом від другої котушки вказаного датчика положення, прямий вхід другого випрямляча з'єднаний з виводом від другої котушки індуктивності, а інший вхід другого випрямляча з'єднаний із виводом від першої котушки індуктивності диференційного датчика положення, виводи від вказаних випрямлювачів з'єднані із відповідними входами до суматора До схеми визначення показника кутової швидкості входять вимірювальний резистор, з'єднаний 2109 зі входом до буферного підсилювача, який має коло для встановлення необхідного масштабу сигналу на виході датчика та коло для встановлення нульового сигналу на виході буферного підсилювача при відсутності впливу на чутливий елемент. Новим у запропонованому пристрої є розміщення промотора на чутливому елементі так, що вісь його обертання є направленою перпендикулярно до вісі, по якій згинається підвіс та вісі симетрії чутливого елемента. На фіг.1 представлена у площині XOZ принципова конструктивна схема датчика кутової швидкості. На фіг.2 - те саме у площині XOY. На фіг.3 показана система координат, яка пов'язана з об'єктом. На фіг.4 представлена загальна електрична схема датчика кутової швидкості. Датчик для вимірювання кутової швидкості (фіг.1, 2) складається з корпуса 1, в якому на гнучкому пружному підвісові 2 розміщений чутливий елемент 3 у вигляді тонкої пластини з струмопровідного матеріалу, наприклад із алюмінієвого сплаву Д16. На чутливому елементі підвішують промотор 4 так, щоб його вісь обертання (вісь кінетичного моменту Н) була перпендикулярна до вісі А-А, по якій згинається підвіс, та до поздовжньої вісі симетрії чутливого елемента Б-Б (фіг.1). У якості промотора 4 можна використовувати будьякий серійно виготовлений промотор з необхідними технічними характеристиками, наприклад промотор ГМС-0.01В. На внутрішній боковій стінці корпуса 1 встановлені один проти Іншого постійні магніти 5 плоскої форми із зустрічною орієнтацією магнітних полів та увімкнуті по мостовій схемі індукційні котушки 6, 7 датчика положення чутливого елемента 3, у якості якого може бути використаний, наприклад, диференційний датчик положення. Живлення вказаних котушок 6, 7 здійснюється за допомогою високочастотного генератора 8 (фіг.4). Виводи від індукційних котушок 6, 7 диференційного датчика положення з'єднані з відповідними входами до блоку 9 для формування ВІДПОВІДНОЇ компенсаційної сили для здійснення зворотного зв'язку будь-яким відповідним відомим магнітоелектричним силовим перетворювачем. Проте краще це здійснювати шляхом обробки диференційних сигналів, які поступають від вказаних котушок 6, 7 датчика положення так, як це описано далі. Блок 9 можна встановлювати як у корпусі 1 пристрою, так і поза ним. В останньому випадку розширюються можливі сфери застосування датчика. На чутливому елементі 3 у зустрічному полі розміщених на корпусі постійних магнітів 5 встановлена компенсаційна котушка 10, краще у вигляді плоскої індукційної котушки 10, обмотка якої зроблена, наприклад, з мідного проводу. Вказана котушка 10 розміщена в чутливому елементі у заглибленні так, щоб вона знаходилася на одному рівні із зовнішньою поверхнею чутливого елемента. Подача живлення до компенсаційної котушки 10 та до промотора 4 здійснюється через металічний підвіс 2 чутливого елемента 3. Чутливий елемент 3 закріплено на підвісові, який складається принаймні з пари пругких і гнуч в ких пластинок 2, розміщених по різні боки від чутливого елемента. Кожна з пластинок 2 підвісу утримується за кінці між двома паралельними пластинами 11, одна з яких за один кінець кріпиться до корпуса 1 датчика (ця пластина на фігурах не показана), а Інша своїм протилежним кінцем до чутливого елемента 3. При цьому ПІДВІС 2 має властивість згинатися. Підвіс 2 у формі тонкої прямокутної пластинки виготовляють з матеріалів, яким також властива висока міцність та пружність, наприклад, реній-молібденовий сплав. Інша особливість підвісу полягає в тому, що його довжина достатньо мала у порівнянні з шириною. Наприклад, довжина, ширина та товщина підвісу 2 можуть співвідноситися між собою як 5:15:1 відповідно. Це істотно підвищує власну частоту коливань підвісу та покращує динамічні властивості датчика. Вказаний підвіс 2 можна також прикріплювати до корпуса 1 датчика через перехідник 12 за допомогою пругких гнучких балочок (на фігурах не показані), які розміщують паралельно до вимірювальної' вісі X, причому їх жорстко прикріплюють одним кінцем до корпуса 1, і іншим - до перехідника 12. Кількість балочок має бути те меншою за три і вони повинні розміщуватися принаймні у двох паралельних площинах. Пругкість балочок має перевищувати пругкість підвісу 2 чутливого елемента 3. Таке розміщення та властивості балочок дозволятиме перехіднику 12 переміщуватися в площині XOZ, паралельній до вимірювальної вісі, під впливом ударних сил, які діятимуть на корпус 1 у вказаній площині, що зменшуватиме навантаження на підвіс 2 чутливого елемента 3. Для обмеження переміщення чутливого елемента 3 в площині XOZ та XOY застосовані обмежувачі (на фігурах не показані) Постійні магніти 5 виготовляють із сплавів, які мають високі магнітні властивості та проявляють стабільність в широкому діапазоні температур. Таким матеріалом може бути, наприклад, самарійкобальтовий сплав. Блок 9 - це може бути будь-який ВІДПОВІДНИЙ пристрій аналогового типу для обробки диференційних сигналів, зокрема він може складатися з двох випрямлячів 13 та 14, які зроблені по схемі активного випрямлення високочастотного електричного сигналу. Кожен з випрямлячів 13 і 14 має по два відповідних входи. Прямий вхід - для з'єднання із виводом від однієї' котушки індуктивності диференційного датчика положення чутливого елемента 3, а інший - для з'єднання з виводом від іншої котушки цього ж датчика положення. Зокрема, прямий вхід випрямляча 13 з'єднаний із виводом від котушки 6 датчика положення, а інший - з виводом від котушки 7. І навпаки, прямий вхід до випрямляча 14 з'єднаний з виводом від котушки 7 датчика положення, і інший - з виводом від котушки 6 того ж датчика положення чутливого елемента 3. Амплітуда електричного сигналу на виході з випрямляча 13 залежить не лише від амплітуди сигналу з котушки 6, але і від різниці між амплітудами сигналів від котушок 6 та 7, а амплітуда сигналу на виході з випрямляча 14 залежатиме від амплітуди сигналу з котушки 7 та від різниці між амплітудами сигналів з котушок 7 та 6. Виводи активних випрямлячів 13 та 14 пов'язані зі входа 2109 ми до суматора 15, на виході якого амплітуда електричного сигналу пропорційна величині відхилення чутливого елемента, а знак вказує на напрямок відхилення. При потребі, вивід суматора 15 з'єднують зі входом підсилювача 16. Навантаженням суматора 15 - підсилювача 16 є послідовно увімкнуті компенсаційна котушка 10 магнітоелектричного силового перетворювача та вимірювальний резистор 17, з паралельно увімкнутим конденсатором 18. Стала часу RC-кола, до якого входять паралельно увімкнуті резистор 17 та конденсатор 18, дорівнює: T^RC. Стала часу Т відповідає частоті f: f=1/27rT. Частота f дорівнює верхній частоті вимірюваних кутових швидкостей. Вимірювальний резистор 17 з'єднаний зі входом до буферного підсилювача 19, який має коло для встановлення на виході датчика кутової швидкості необхідного масштабу сигналу (Ямасшт) за допомогою резистора 20 та коло для встановлення нульового сигналу за допомогою корегуючого резистора 21 (RKOper) на виході буферного підсилювача 19 при відсутності впливу на чутливий елемент 3. Живлення на резистор 21 подається від високо стабільного джерела струму (на фігурах не показано). Для більшої наочності на фіг.З представлена пов'язана з об'єктом права система координат, на якій точка О - це центр ваги чутливого елемента З, П - абсолютна кутова швидкість об'єкта, вісь обертання промотора (вісь кінетичного моменту н ) направлена вздовж вісі OY, вісь підвісу - вздовж вісі 02, а вимірювальною є вісь ОХ. Запропонований датчик кутової швидкості працює наступним чином. Після виходу промотора 4 на робочий режим (пристрій для розгонки промотора на фігурах не показано) подають живлення до відповідних блоків датчика кутової швидкості. При обертанні об'єкта, кутову швидкість якого вимірюють та на якому встановлено пристрій для її вимірювання, виникає момент напрямку Wh, який буде прагнути сумістити вектор кінетичного моменту Н з складовою кутової швидкості QX об'єкта по найкоротшій відстані: Mh = H-f2X [2]. Причому, вектор направляючого моменту Ц н збігатиметься з позитивним Л напрямком ВІСІ OZ. Це означає, що під впливом направляючого моменту Ш чутливий елемент З буде прагнути повернутися кругом ВІСІ OZ, а підвіс буде згинатися по цій самій ВІСІ OZ, що визначатиметься новим взаємним положенням чутливого елемента 3 та індукційних котушок 6 та 7 датчика положення відносно того положення, яке він займав у корпусі 1 у стані рівноваги. Живлення до вказаних котушок 6 та 7 надходить від високочастотного генератора 8. Сигнали від котушок 6, 7 диференційного датчика положення поступатимуть на вхід до блоку 9 для обробки: випрямлення його у постійний по формі і змінний за знаком сигнал, підсилення та перетворення його на компенсаційний сигнал, який надходитиме до розміщеної на чутливому елементі та в зустрічному полі постійних магнітів плоскої компенсаційної котушки 10 магнітоелектричного силово 8 го перетворювача для здійснення зворотного зв'язку. Реалізація зворотного зв'язку полягає в тому, щоб повертати чутливий елемент 3 у первісне положення і втримувати його у стані рівноваги відносно корпуса 1, для чого формується компенсаційна сила, за допомогою якої розвивається момент протидії №Ьим, який дорівнює направляючому моменту Мн, але при цьому має протилежний знак. Для додаткового підвищення точності вимірювання та збільшення чутливості диференційного датчика положення використовують схеми активних випрямлячів 13 та 14, що дозволяють здійснювати обробку диференційних сигналів таким чином, що амплітуда електричного сигналу на виході з випрямляча 13 залежить не лише від амплітуди сигналу з котушки 6, але І від різниці між амплітудами сигналів від котушок 6 та 7, а амплітуда сигналу на виході з випрямляча 14 залежатиме від амплітуди сигналу від котушки 7 та від різниці між амплітудами сигналів від котушок 7 та 6. Для цього на прямий вхід випрямляча 13 від котушки 6 поступає високочастотний сигнал у формі: Ui=Ui-sin(o-t, а на інший вхід випрямляча 13 - сигнал від котушки 7 у формі: U2=L)2-sinco-t. На виході випрямляча 13 буде сигнал у формі: (U1-KU2}, де Ui та U2 - амплітуди високочастотних коливань сигналів відповідно від котушок 6 та 7; їй, ііг - поточні високочастотні коливання сигналів, відповідно від котушок 6 та 7; - кругова частота генера± тора для живлення котушок 6 та 7 диференційного датчика положення; t - час, К
ДивитисяДодаткова інформація
МПК / Мітки
МПК: G01P 9/00, G01P 11/00
Мітки: кутової, датчик, швидкості
Код посилання
<a href="https://ua.patents.su/6-2109-datchik-kutovo-shvidkosti.html" target="_blank" rel="follow" title="База патентів України">Датчик кутової швидкості</a>
Датчик кутової швидкості та система його віброзахисту
Номер патенту: 1207
Опубліковано: 15.04.2002
Автори: Шкляр Володимир Петрович, Леоненко Сергій Миколайович, Гуменюк Володимир Григорович, Шервашидзе Володимир Варлаамович, Васильєв Володимир Леонідович, Гаврилюк Володимир Леонідович, Олексієнко Микола Петрович
МПК: G01C 19/00, G01P 9/00
Мітки: віброзахисту, система, датчик, кутової, швидкості
Формула / Реферат:
1. Датчик кутової швидкості, який містить розміщений за допомогою підвісу чутливий елемент з гіромотором, датчик положення, коло зворотного зв'язку та схему визначення показника кутової швидкості, який відрізняється тим, що чутливий елемент підвішено у корпусі за допомогою гнучкого підвісу, гіромотор встановлено на чутливому елементі так, що вісь його обертання направлена перпендикулярно до осі, по якій згинається підвіс, і паралельно з віссю...
Спосіб та пристрій для вимірювання кутової швидкості
Номер патенту: 61044
Опубліковано: 15.10.2003
Автори: Мурзаханов Олександр Валентинович, Шервашидзе Володимир Варламович, Леоненко Костянтин Миколайович
МПК: G01P 9/00
Мітки: кутової, пристрій, спосіб, швидкості, вимірювання
Формула / Реферат:
1. Спосіб для вимірювання кутової швидкості (), який полягає у тому, що подають керуючий сигнал на блок живлення гіроскопічного датчика кутової швидкості для подачі напруги, необхідної для розкручування гіромотора до його виходу на стаціонарний режим обертання, на виході датчика вимірюють величину напруги при даному напрямку обертання ротора гіромотора (U+), подають...
Аналоговий датчик кутової швидкості
Номер патенту: 22701
Опубліковано: 07.04.1998
Автори: Кулаков Павло Ігорович, Поджаренко Володимир Олександрович, Поджаренко Андрій Володимирович, Кухарчук Василь Васильович, Михалевич Володимир Маркусович, Кучерук Володимир Юрійович
МПК: G01P 3/42
Мітки: швидкості, кутової, аналоговий, датчик
Формула / Реферат:
Аналоговый датчик угловой скорости, содержащий вал, модулятор светового потока в виде диска, связанный с валом, источник света расположенный перед модулятором, линейный фотоприемник, расположенный напротив источника света по другую сторону модулятора, диафрагму, установленную перед линейным фотоприемником, отличающийся тем, что диафрагма имеет прорезь, форма которой ограничена двумя лучами, которые начинаются в центре модулятора светового...
Датчик кутової швидкості

Номер патенту: 17753
Опубліковано: 20.05.1997
Автори: Поджаренко Андрій Володимирович, Кухарчук Василь Васильович, Гоменюк Анатолій Сергійович, Кулаков Павло Ігоревич, Поджаренко Володимир Олександрович
МПК: G01P 3/42
Мітки: швидкості, кутової, датчик
Формула / Реферат:
Датчик угловой скорости, содержащий источник света, модулятор светового потока в виде диска, в котором выполнены прозрачные и непрозрачные элементы равной угловой ширины, линейный фотоприемник, диафрагму, установленную перед фотоприемником, отличающийся тем, что в него введен второй фотоприемник, сдвинутый относительно первого по отношению к центру модулятора на угол, который в полтора раза больше угловой ширины прозрачных и непрозрачных...
Датчик кутової швидкості для динамічних вимірювань

Номер патенту: 24374
Опубліковано: 17.07.1998
Автори: Кулаков Павло Ігорович, Поджаренко Андрій Володимирович, Кухарчук Василь Васильович, Кучерук Володимир Юрійович, Михалевич Володимир Маркусович, Поджаренко Володимир Олександрович
МПК: G01P 3/42
Мітки: вимірювань, динамічних, швидкості, датчик, кутової
Формула / Реферат:
Датчик угловой скорости для динамических измерений, содержащий источник света, модулятор светового потока, два линейных фотоприемника, диафрагму, установленную перед линейными фотоприемниками, два компаратора напряжений, выходы которых присоединены ко входам элемента ИЛИ, выход которого присоединен к тактовому входу счетного триггера, прямой выход которого присоединен к адресному входу аналогового коммутатора, выходы первого и второго...
Попередній патент: Пристрій для подачі качанів
Наступний патент: Комплектний розподільний пристрій зовнішньої установки крпз-35
Випадковий патент: Установка піролізу