Спосіб автоматичного керування процесом флотації
Номер патенту: 28886
Опубліковано: 25.12.2007
Автори: Шульгін Сергій Костянтинович, Ульшин Віталій Олександрович
Формула / Реферат
Корисна модель відноситься до вугільної промисловості і може бути використана в керуванні технологічними процесами вуглезбагачувальних фабрик.
В основу корисної моделі поставлено задачу створення способу автоматичного управління процесом флотації шляхом використання адаптивної прогнозуючої моделі кінетики флотопроцесу.
Поставлена задача досягається тим, що у способі, що заявляється, підвищення якості автоматичного управління процесом флотації вугільних шламів досягають шляхом мінімізації квадратичного критерію якості управління за рахунок реалізації дискретної оптимальної за квадратичним критерієм якості управління системи управління, у якій застосовують принцип розділення. Завдання керуючого впливу по каналу «витрата реагентів - зольність концентрату», формують адаптивною прогнозуючою моделлю кінетики на основі даних про обурюючи впливи (характеристики початкового продукту, умови у яких відбувається технологічний процес, конструкційні особливості устаткування) і необхідних показниках якості кінцевого продукту, або ж формують керуючим пристроєм пропорційно різниці між фактичною зольністю та зольністю, що прогнозується, реалізуючи дискретним детермінованим регулятором.
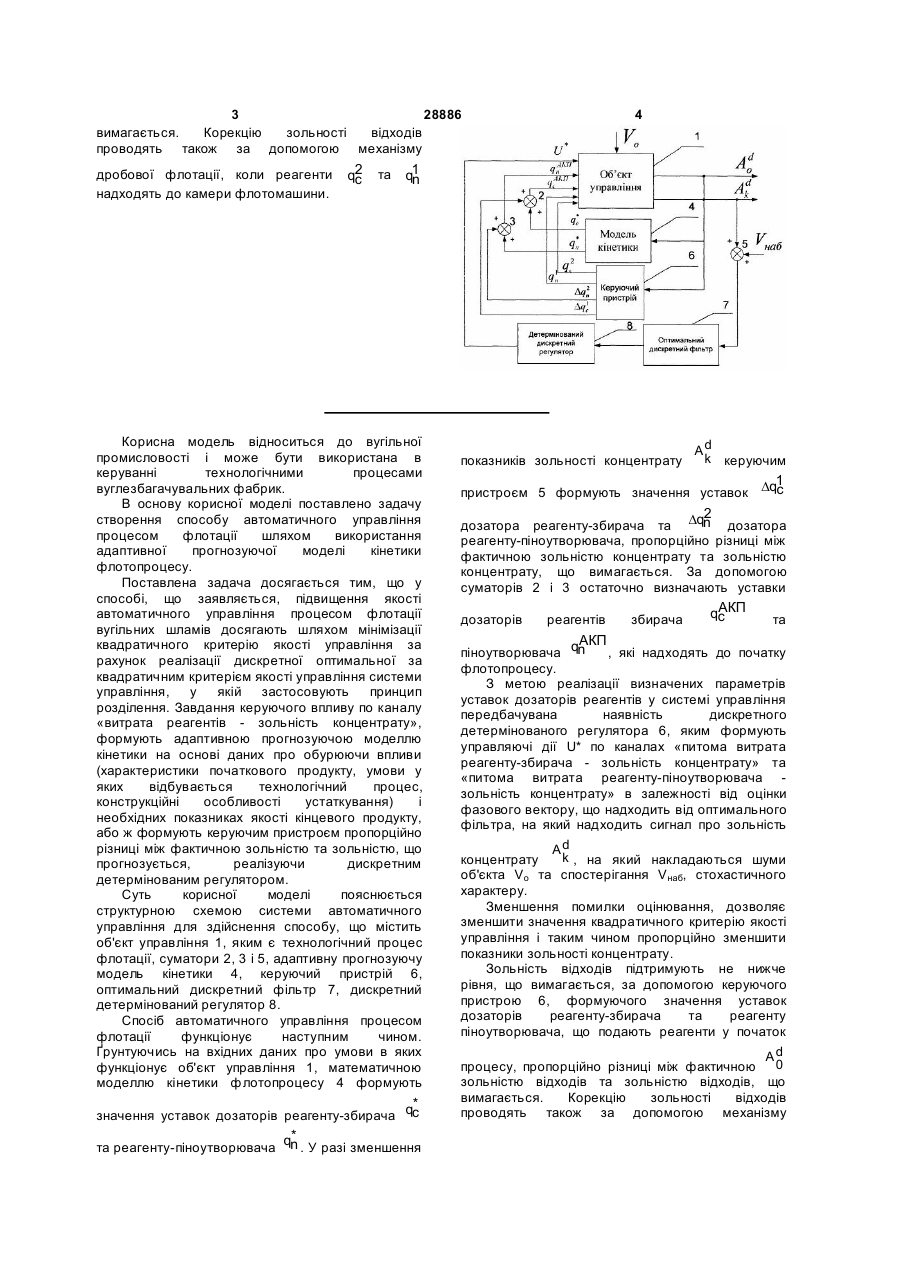
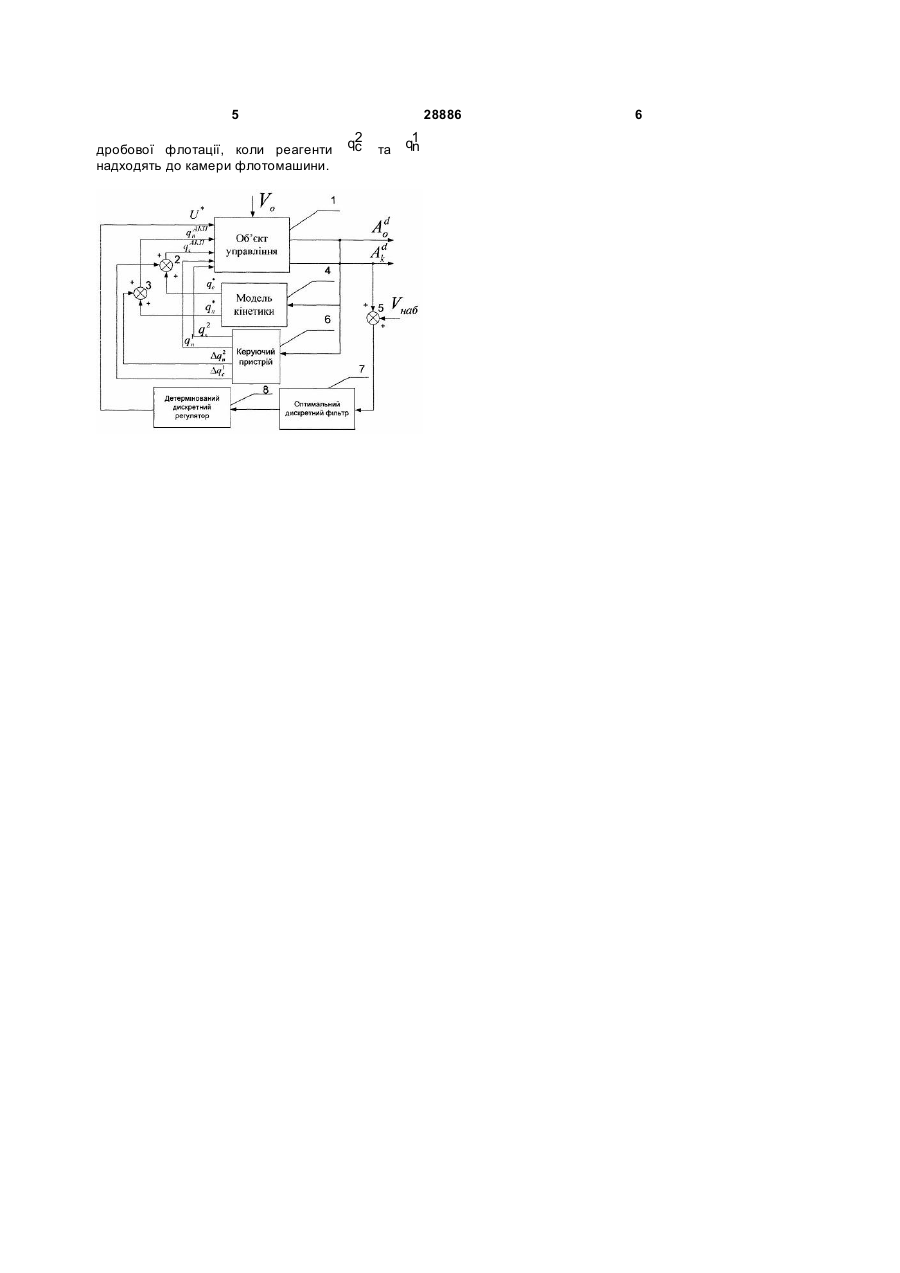
Суть корисної моделі пояснюється структурною схемою системи автоматичного управління для здійснення способу, що містить об'єкт управління 1, яким є технологічний процес флотації, суматори 2, 3 і 5, адаптивну прогнозуючу модель кінетики 4, керуючий пристрій 6, оптимальний дискретний фільтр 7, дискретний детермінований регулятор 8.
Спосіб автоматичного управління процесом флотації функціонує наступним чином. Ґрунтуючись на вхідних даних про умови в яких функціонує об'єкт управління 1, математичною моделлю кінетики флотопроцесу 4 формують значення уставок дозаторів реагенту-збирача та реагенту-піноутворювача . У разі зменшення показників зольності концентрату керуючим пристроєм 5 формують значення уставок дозатора реагенту-збирача та дозатора реагенту-піноутворювача, пропорційно різниці між фактичною зольністю концентрату та зольністю концентрату, що вимагається. За допомогою суматорів 2 і 3 остаточно визначають уставки дозаторів реагентів збирача та піноутворювача , які надходять до початку флотопроцесу.
З метою реалізації визначених параметрів уставок дозаторів реагентів у системі управління передбачувана наявність дискретного детермінованого регулятора 6, яким формують управляючі дії U* по каналах «питома витрата реагенту-збирача - зольність концентрату» та «питома витрата реагенту-піноутворювача - зольність концентрату» в залежності від оцінки фазового вектору, що надходить від оптимального фільтра, на який надходить сигнал про зольність концентрату , на який накладаються шуми об'єкта Vo та спостерігання Vнаб, стохастичного характеру.
Зменшення помилки оцінювання, дозволяє зменшити значення квадратичного критерію якості управління і таким чином пропорційно зменшити показники зольності концентрату.
Зольність відходів підтримують не нижче рівня, що вимагається, за допомогою керуючого пристрою 6, формуючого значення уставок дозаторів реагенту-збирача та реагенту піноутворювача, що подають реагенти у початок процесу, пропорційно різниці між фактичною зольністю відходів та зольністю відходів, що вимагається. Корекцію зольності відходів проводять також за допомогою механізму дробової флотації, коли реагенти та надходять до камери флотомашини.
Текст
УКРАЇНА (19) UA (11) 28886 (13) U (51) МПК (2006) B03B 13/00 МІНІСТЕРСТВО ОСВІТИ І НАУКИ УКРАЇНИ ДЕРЖАВНИЙ ДЕПАРТАМЕНТ ІНТЕЛЕКТУАЛЬНОЇ ВЛАСНОСТІ ОПИС видається під відповідальність власника патенту ДО ПАТЕНТУ НА КОРИСНУ МОДЕЛЬ (54) СПОСІБ АВТОМАТИЧНОГО КЕРУВАННЯ ПРОЦЕСОМ ФЛОТАЦІЇ 1 Ґрунтуючись на вхідних даних про умови в яких функціонує об'єкт управління 1, математичною моделлю кінетики флотопроцесу 4 формують * значення уставок дозаторів реагенту-збирача qc * та реагенту-піноутворювача qn . У разі зменшення показників зольності концентрату A d керуючим k пристроєм 5 формують значення уставок Dq1 c 2 дозатора дозатора реагенту-збирача та Dqn реагенту-піноутворювача, пропорційно різниці між фактичною зольністю концентрату та зольністю концентрату, що вимагається. За допомогою суматорів 2 і 3 остаточно визначають уставки АКП , які надходять до початку піноутворювача qn флотопроцесу. З метою реалізації визначених параметрів уставок дозаторів реагентів у системі управління передбачувана наявність дискретного детермінованого регулятора 6, яким формують управляючі дії U* по каналах «питома витрата реагенту-збирача - зольність концентрату» та «питома витрата реагенту-піноутворювача зольність концентрату» в залежності від оцінки фазового вектору, що надходить від оптимального фільтра, на який надходить сигнал про зольність концентрату A d , на який накладаються шуми k об'єкта Vo та спостерігання Vнаб, стохастичного характеру. Зменшення помилки оцінювання, дозволяє зменшити значення квадратичного критерію якості управління і таким чином пропорційно зменшити показники зольності концентрату. Зольність відходів підтримують не нижче рівня, що вимагається, за допомогою керуючого пристрою 6, формуючого значення уставок дозаторів реагенту-збирача та реагенту піноутворювача, що подають реагенти у початок процесу, пропорційно різниці між фактичною A d 0 зольністю відходів та зольністю відходів, що U та (13) АКП qс 28886 збирача (11) реагентів UA дозаторів (19) (21) u200709372 (22) 17.08.2007 (24) 25.12.2007 (72) УЛЬШИН ВІТАЛІЙ ОЛЕКСАНДРОВИЧ, UA, ШУЛЬГІН СЕРГІЙ КОСТЯНТИНОВИЧ, UA (73) СХІДНОУКРАЇНСЬКИЙ НАЦІОНАЛЬНИЙ УНІВЕРСИТЕТ ІМЕНІ ВОЛОДИМИРА ДАЛЯ, UA (56) (57) Корисна модель відноситься до вугільної промисловості і може бути використана в керуванні технологічними процесами вуглезбагачувальних фабрик. В основу корисної моделі поставлено задачу створення способу автоматичного управління процесом флотації шляхом використання адаптивної прогнозуючої моделі кінетики флотопроцесу. Поставлена задача досягається тим, що у способі, що заявляється, підвищення якості автоматичного управління процесом флотації вугільних шламів досягають шляхом мінімізації квадратичного критерію якості управління за рахунок реалізації дискретної оптимальної за квадратичним критерієм якості управління системи управління, у якій застосовують принцип розділення. Завдання керуючого впливу по каналу «витрата реагентів - зольність концентрату», формують адаптивною прогнозуючою моделлю кінетики на основі даних про обурюючи впливи (характеристики початкового продукту, умови у яких відбувається технологічний процес, конструкційні особливості устаткування) і необхідних показниках якості кінцевого продукту, або ж формують керуючим пристроєм пропорційно різниці між фактичною зольністю та зольністю, що прогнозується, реалізуючи дискретним детермінованим регулятором. Суть корисної моделі пояснюється структурною схемою системи автоматичного управління для здійснення способу, що містить об'єкт управління 1, яким є технологічний процес флотації, суматори 2, 3 і 5, адаптивну прогнозуючу модель кінетики 4, керуючий пристрій 6, оптимальний дискретний фільтр 7, дискретний детермінований регулятор 8. Спосіб автоматичного управління процесом флотації функціонує наступним чином. 2 3 28886 вимагається. Корекцію зольності відходів проводять також за допомогою механізму дробової флотації, коли реагенти надходять до камери флотомашини. q2 c та 4 q1 n Корисна модель відноситься до вугільної промисловості і може бути використана в керуванні технологічними процесами вуглезбагачувальних фабрик. В основу корисної моделі поставлено задачу створення способу автоматичного управління процесом флотації шляхом використання адаптивної прогнозуючої моделі кінетики флотопроцесу. Поставлена задача досягається тим, що у способі, що заявляється, підвищення якості автоматичного управління процесом флотації вугільних шламів досягають шляхом мінімізації квадратичного критерію якості управління за рахунок реалізації дискретної оптимальної за квадратичним критерієм якості управління системи управління, у якій застосовують принцип розділення. Завдання керуючого впливу по каналу «витрата реагентів - зольність концентрату», формують адаптивною прогнозуючою моделлю кінетики на основі даних про обурюючи впливи (характеристики початкового продукту, умови у яких відбувається технологічний процес, конструкційні особливості устаткування) і необхідних показниках якості кінцевого продукту, або ж формують керуючим пристроєм пропорційно різниці між фактичною зольністю та зольністю, що прогнозується, реалізуючи дискретним детермінованим регулятором. Суть корисної моделі пояснюється структурною схемою системи автоматичного управління для здійснення способу, що містить об'єкт управління 1, яким є технологічний процес флотації, суматори 2, 3 і 5, адаптивну прогнозуючу модель кінетики 4, керуючий пристрій 6, оптимальний дискретний фільтр 7, дискретний детермінований регулятор 8. Спосіб автоматичного управління процесом флотації функціонує наступним чином. Ґрунтуючись на вхідних даних про умови в яких функціонує об'єкт управління 1, математичною моделлю кінетики флотопроцесу 4 формують * значення уставок дозаторів реагенту-збирача qc * та реагенту-піноутворювача qn . У разі зменшення Ad k керуючим 1 пристроєм 5 формують значення уставок Dqc 2 дозатора реагенту-збирача та Dqn дозатора реагенту-піноутворювача, пропорційно різниці між фактичною зольністю концентрату та зольністю концентрату, що вимагається. За допомогою суматорів 2 і 3 остаточно визначають уставки АКП qс дозаторів реагентів збирача та АКП піноутворювача qn , які надходять до початку флотопроцесу. З метою реалізації визначених параметрів уставок дозаторів реагентів у системі управління передбачувана наявність дискретного детермінованого регулятора 6, яким формують управляючі дії U* по каналах «питома витрата реагенту-збирача - зольність концентрату» та «питома витрата реагенту-піноутворювача зольність концентрату» в залежності від оцінки фазового вектору, що надходить від оптимального фільтра, на який надходить сигнал про зольність Ad k , на який накладаються шуми концентрату об'єкта Vo та спостерігання Vнаб, стохастичного характеру. Зменшення помилки оцінювання, дозволяє зменшити значення квадратичного критерію якості управління і таким чином пропорційно зменшити показники зольності концентрату. Зольність відходів підтримують не нижче рівня, що вимагається, за допомогою керуючого пристрою 6, формуючого значення уставок дозаторів реагенту-збирача та реагенту піноутворювача, що подають реагенти у початок Ad процесу, пропорційно різниці між фактичною 0 зольністю відходів та зольністю відходів, що вимагається. Корекцію зольності відходів проводять також за допомогою механізму показників зольності концентрату 5 дробової флотації, коли реагенти надходять до камери флотомашини. 28886 q2 c та q1 n 6
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod of automatic control of flotation process
Автори англійськоюUlshyn Vitalii Oleksandrovych, Shulhin Serhii Kostiantynovych
Назва патенту російськоюСпособ автоматического управления процессом флотации
Автори російськоюУльшин Виталий Александрович, Шульгин Сергей Константинович
МПК / Мітки
МПК: B03B 13/00
Мітки: керування, процесом, автоматичного, флотації, спосіб
Код посилання
<a href="https://ua.patents.su/3-28886-sposib-avtomatichnogo-keruvannya-procesom-flotaci.html" target="_blank" rel="follow" title="База патентів України">Спосіб автоматичного керування процесом флотації</a>
Спосіб автоматичного керування уставками дозаторів реагентів
Номер патенту: 28523
Опубліковано: 10.12.2007
Автори: Ульшин Віталій Олександрович, Шульгін Сергій Костянтинович
МПК: B03B 13/00
Мітки: керування, уставками, спосіб, дозаторів, автоматичного, реагентів
Формула / Реферат:
Спосіб автоматичного керування уставками дозаторів реагентів, що полягає у прогнозуванні показників якості концентрату, який відрізняється тим, що прогнозування показників якості концентрату та відходів, які використовуються для визначення уставок дозаторів реагентів, здійснюють адаптивною прогнозуючою моделлю кінетики флотопроцесу, базуючись на фізико-хімічних і гідродинамічних властивостях процесу флотації (характеристика вугілля, що...
Спосіб автоматичного керування процесом виробництва натурального оцту
Номер патенту: 26157
Опубліковано: 10.09.2007
Автори: Красіля Ігор Миколайович, Муратов Віктор Георгійович
МПК: C12J 1/00
Мітки: натурального, спосіб, керування, автоматичного, виробництва, оцту, процесом
Формула / Реферат:
Спосіб автоматичного керування процесом виробництва натурального оцту, що включає вимірювання та регулювання температур культуральної рідини в кожному із окислювачів бродильної батареї шляхом зміни витрати охолоджувальної води через теплообмінники окислювачів, вимірювання витрати сусла на вході першого окислювача батареї, вимірювання концентрації оцту в першому і в останньому окислювачі батареї, регулювання концентрації оцту шляхом зміни...
Спосіб автоматичного керування процесом сушіння екстракту кави в розпилювальній сушарці

Номер патенту: 26107
Опубліковано: 10.09.2007
Автори: Муратов Віктор Георгійович, Юсипова Валентина Василівна
МПК: F26B 25/22
Мітки: автоматичного, спосіб, сушіння, сушарці, екстракту, керування, кави, процесом, розпилювальний
Формула / Реферат:
Спосіб керування процесом сушіння екстракту кави, що включає вимірювання температури сушильного агента на вході в сушарку, вимірювання температури сушильного агента на виході з сушарки, вимірювання температури продукту перед розпилюванням, вимірювання розрідження в топці та в конусі сушарки, регулювання температури сушильного агента на вході в сушарку шляхом зміни витрати палива на горіння в топці, регулювання температури сушильного агента на...
Спосіб флотації вугілля
Номер патенту: 12709
Опубліковано: 15.02.2006
Автори: Морозов Олег Олексійович, Курченко Іван Павлович, Морозова Людмила Олександрівна, Спінєєв Володимир Анатолійович, Черкасов Віктор Валентинович, Мавренко Генадій Анатолійович
Мітки: вугілля, спосіб, флотації
Формула / Реферат:
Спосіб флотації вугілля, що включає дробову подачу флотореагенту, частину якого подають до вузла підготовки пульпи, який відрізняється тим, що флотореагент, який залишився, розподіляють безпосередньо у повітряні патрубки аераційних блоків флотаційної машини.
Спосіб флотації шламів
Номер патенту: 50204
Опубліковано: 15.10.2002
Автор: Шевкопляс Володимир Миколайович
МПК: B03D 1/00
Мітки: флотації, спосіб, шламів
Формула / Реферат:
Спосіб флотації шламів, який включає попереднє здрібнення вихідної сировини, її пульпування, кондиціонування зі збирачем та розділення на збагачений вуглешламовий концентрат та породну завись, який відрізняється тим, що як збирач використовують культуральну рідину мікроміцетів, яку одержують при культивуванні мікроскопічних грибів.
Попередній патент: Спосіб виготовлення фотоприймачів на основі сdte
Наступний патент: Пристрій для протидії сходу залізничного складу з рейок
Випадковий патент: Спосіб підготовки і пуску ракети з підвішеними баками з плавучого ракетного комплексу