Робототехнічний комплекс для здійснення мікропереміщень
Номер патенту: 30449
Опубліковано: 25.02.2008
Автори: Барабаш Ярослав Васильович, Остафьєв Володимир Олександрович, Філіппова Марина В`ячеславівна, Діордіца Ірина Миколаївна, Вострікова Ольга Анатоліївна
Формула / Реферат
Робототехнічний комплекс для здійснення мікропереміщень, що містить пристрій для здійснення мікропереміщень, до складу якого входить корпус, в якому розташовані два гвинтових з'єднання з різними значеннями кроків різьби, одного й того ж направлення, який відрізняється тим, що робототехнічний комплекс для здійснення мікропереміщень споряджено п'єзоелектричним двигуном, вихід якого підключений до пристрою для здійснення мікропереміщень, а вхід - до ЕОМ, при цьому пристрій для здійснення мікропереміщень споряджено рухомим корпусом, який встановлений на корпусі пристрою для здійснення мікропереміщень, двома гвинтами, що встановлені з обох сторін корпусу та мають зв'язок з гвинтовим з'єднанням, для підключення п'єзоелектричного двигуна, і направляючою вилкою, що має зв'язок з одним із вищевказаних гвинтів через гвинтове з'єднання.
Текст
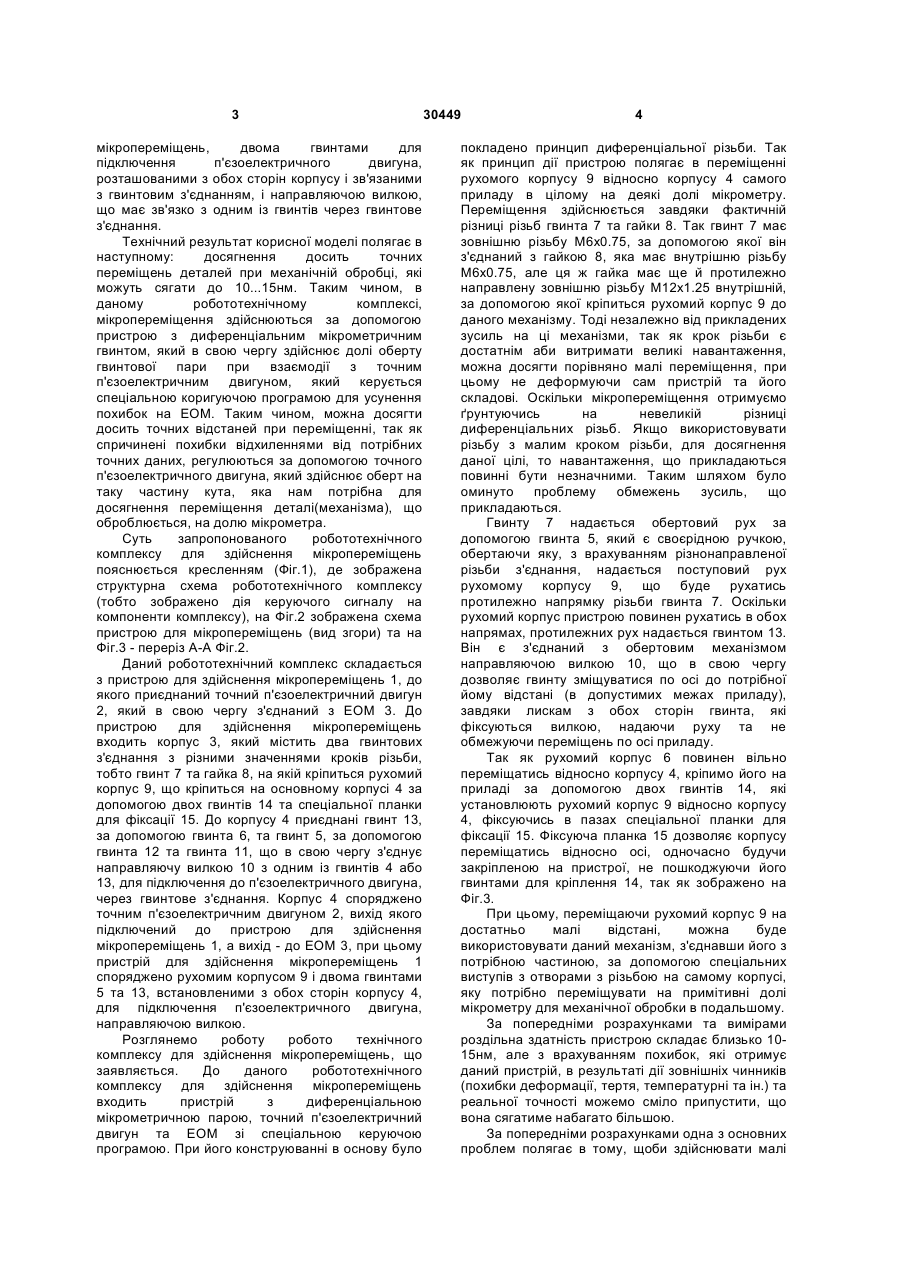
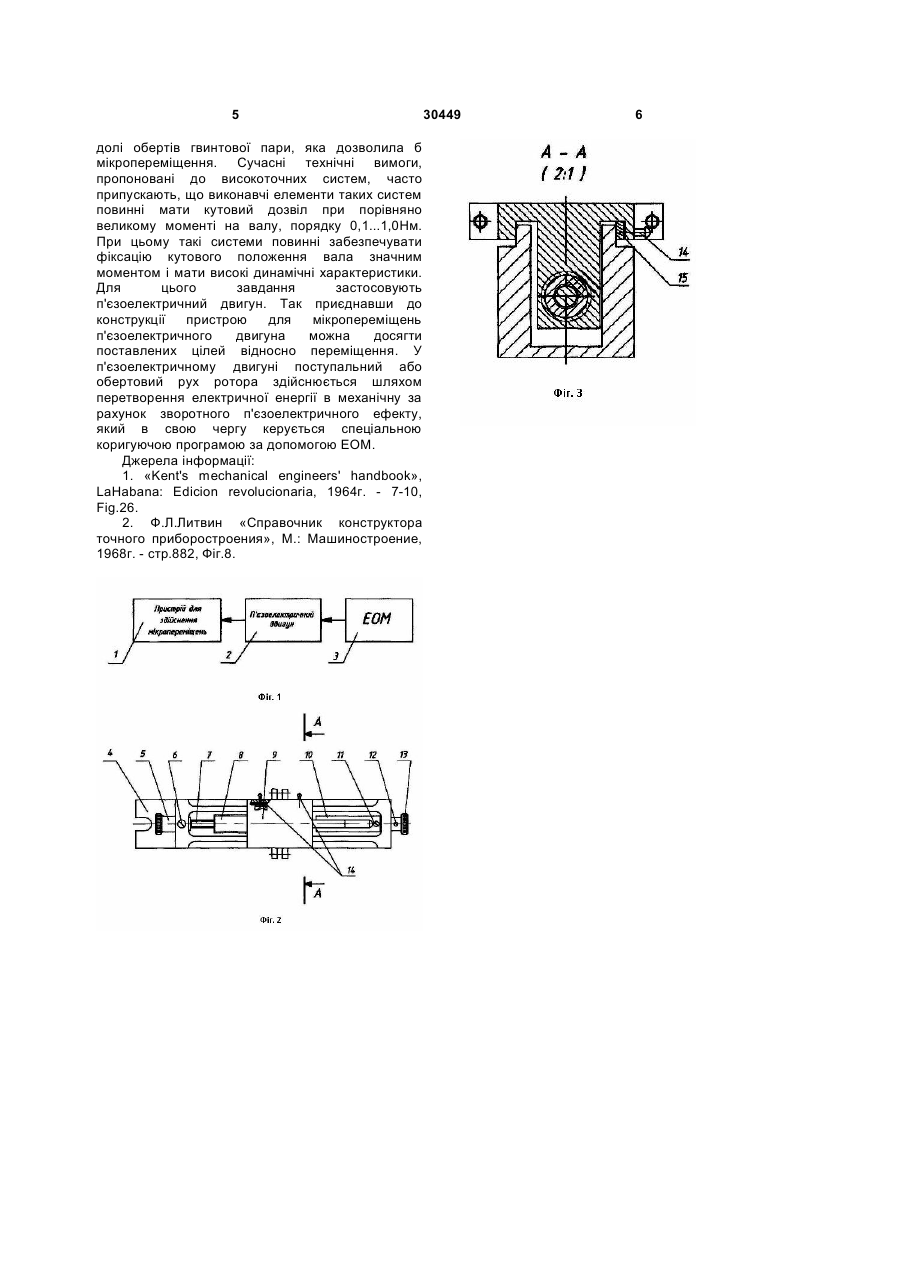
Робототехнічний комплекс для здійснення мікропереміщень, що містить пристрій для здійснення мікропереміщень, до складу якого входить корпус, в якому розташовані два 3 мікропереміщень, двома гвинтами для підключення п'єзоелектричного двигуна, розташованими з обох сторін корпусу і зв'язаними з гвинтовим з'єднанням, і направляючою вилкою, що має зв'язко з одним із гвинтів через гвинтове з'єднання. Технічний результат корисної моделі полягає в наступному: досягнення досить точних переміщень деталей при механічній обробці, які можуть сягати до 10...15нм. Таким чином, в даному робототехнічному комплексі, мікропереміщення здійснюються за допомогою пристрою з диференціальним мікрометричним гвинтом, який в свою чергу здійснює долі оберту гвинтової пари при взаємодії з точним п'єзоелектричним двигуном, який керується спеціальною коригуючою програмою для усунення похибок на ЕОМ. Таким чином, можна досягти досить точних відстаней при переміщенні, так як спричинені похибки відхиленнями від потрібних точних даних, регулюються за допомогою точного п'єзоелектричного двигуна, який здійснює оберт на таку частину кута, яка нам потрібна для досягнення переміщення деталі(механізма), що оброблюється, на долю мікрометра. Суть запропонованого робототехнічного комплексу для здійснення мікропереміщень пояснюється кресленням (Фіг.1), де зображена структурна схема робототехнічного комплексу (тобто зображено дія керуючого сигналу на компоненти комплексу), на Фіг.2 зображена схема пристрою для мікропереміщень (вид згори) та на Фіг.3 - переріз А-А Фіг.2. Даний робототехнічний комплекс складається з пристрою для здійснення мікропереміщень 1, до якого приєднаний точний п'єзоелектричний двигун 2, який в свою чергу з'єднаний з ЕОМ 3. До пристрою для здійснення мікропереміщень входить корпус 3, який містить два гвинтових з'єднання з різними значеннями кроків різьби, тобто гвинт 7 та гайка 8, на якій кріпиться рухомий корпус 9, що кріпиться на основному корпусі 4 за допомогою двох гвинтів 14 та спеціальної планки для фіксації 15. До корпусу 4 приєднані гвинт 13, за допомогою гвинта 6, та гвинт 5, за допомогою гвинта 12 та гвинта 11, що в свою чергу з'єднує направляючу вилкою 10 з одним із гвинтів 4 або 13, для підключення до п'єзоелектричного двигуна, через гвинтове з'єднання. Корпус 4 споряджено точним п'єзоелектричним двигуном 2, вихід якого підключений до пристрою для здійснення мікропереміщень 1, а вихід - до ЕОМ 3, при цьому пристрій для здійснення мікропереміщень 1 споряджено рухомим корпусом 9 і двома гвинтами 5 та 13, встановленими з обох сторін корпусу 4, для підключення п'єзоелектричного двигуна, направляючою вилкою. Розглянемо роботу робото технічного комплексу для здійснення мікропереміщень, що заявляється. До даного робототехнічного комплексу для здійснення мікропереміщень входить пристрій з диференціальною мікрометричною парою, точний п'єзоелектричний двигун та ЕОМ зі спеціальною керуючою програмою. При його конструюванні в основу було 30449 4 покладено принцип диференціальної різьби. Так як принцип дії пристрою полягає в переміщенні рухомого корпусу 9 відносно корпусу 4 самого приладу в цілому на деякі долі мікрометру. Переміщення здійснюється завдяки фактичній різниці різьб гвинта 7 та гайки 8. Так гвинт 7 має зовнішню різьбу М6х0.75, за допомогою якої він з'єднаний з гайкою 8, яка має внутрішню різьбу М6х0.75, але ця ж гайка має ще й протилежно направлену зовнішню різьбу М12x1.25 внутрішній, за допомогою якої кріпиться рухомий корпус 9 до даного механізму. Тоді незалежно від прикладених зусиль на ці механізми, так як крок різьби є достатнім аби витримати великі навантаження, можна досягти порівняно малі переміщення, при цьому не деформуючи сам пристрій та його складові. Оскільки мікропереміщення отримуємо ґрунтуючись на невеликій різниці диференціальних різьб. Якщо використовувати різьбу з малим кроком різьби, для досягнення даної цілі, то навантаження, що прикладаються повинні бути незначними. Таким шляхом було оминуто проблему обмежень зусиль, що прикладаються. Гвинту 7 надається обертовий рух за допомогою гвинта 5, який є своєрідною ручкою, обертаючи яку, з врахуванням різнонаправленої різьби з'єднання, надається поступовий рух рухомому корпусу 9, що буде рухатись протилежно напрямку різьби гвинта 7. Оскільки рухомий корпус пристрою повинен рухатись в обох напрямах, протилежних рух надається гвинтом 13. Він є з'єднаний з обертовим механізмом направляючою вилкою 10, що в свою чергу дозволяє гвинту зміщуватися по осі до потрібної йому відстані (в допустимих межах приладу), завдяки лискам з обох сторін гвинта, які фіксуються вилкою, надаючи руху та не обмежуючи переміщень по осі приладу. Так як рухомий корпус 6 повинен вільно переміщатись відносно корпусу 4, кріпимо його на приладі за допомогою двох гвинтів 14, які установлюють рухомий корпус 9 відносно корпусу 4, фіксуючись в пазах спеціальної планки для фіксації 15. Фіксуюча планка 15 дозволяє корпусу переміщатись відносно осі, одночасно будучи закріпленою на пристрої, не пошкоджуючи його гвинтами для кріплення 14, так як зображено на Фіг.3. При цьому, переміщаючи рухомий корпус 9 на достатньо малі відстані, можна буде використовувати даний механізм, з'єднавши його з потрібною частиною, за допомогою спеціальних виступів з отворами з різьбою на самому корпусі, яку потрібно переміщувати на примітивні долі мікрометру для механічної обробки в подальшому. За попередніми розрахунками та вимірами роздільна здатність пристрою складає близько 1015нм, але з врахуванням похибок, які отримує даний пристрій, в результаті дії зовнішніх чинників (похибки деформації, тертя, температурні та ін.) та реальної точності можемо сміло припустити, що вона сягатиме набагато більшою. За попередніми розрахунками одна з основних проблем полягає в тому, щоби здійснювати малі 5 долі обертів гвинтової пари, яка дозволила б мікропереміщення. Сучасні технічні вимоги, пропоновані до високоточних систем, часто припускають, що виконавчі елементи таких систем повинні мати кутовий дозвіл при порівняно великому моменті на валу, порядку 0,1...1,0Нм. При цьому такі системи повинні забезпечувати фіксацію кутового положення вала значним моментом і мати високі динамічні характеристики. Для цього завдання застосовують п'єзоелектричний двигун. Так приєднавши до конструкції пристрою для мікропереміщень п'єзоелектричного двигуна можна досягти поставлених цілей відносно переміщення. У п'єзоелектричному двигуні поступальний або обертовий рух ротора здійснюється шляхом перетворення електричної енергії в механічну за рахунок зворотного п'єзоелектричного ефекту, який в свою чергу керується спеціальною коригуючою програмою за допомогою ЕОМ. Джерела інформації: 1. «Kent's mechanical engineers' handbook», LaHabana: Edicion revolucionaria, 1964г. - 7-10, Fig.26. 2. Ф.Л.Литвин «Справочник конструктора точного приборостроения», М.: Машиностроение, 1968г. - стр.882, Фіг.8. 30449 6
ДивитисяДодаткова інформація
Назва патенту англійськоюRobotic complex for realization of microdisplacements
Автори англійськоюOstafiev Volodymyr Oleksandrovych, Vostrikova Olha Anatoliivna, Diorditsa Iryna Mykolaivna, Filippova Maryna Viacheslavivna, Barabash Yaroslav Vasyliovych
Назва патенту російськоюРобототехнический комплекс для осуществления микроперемещений
Автори російськоюОстафьев Владимир Александрович, Вострикова Ольга Анатольевна, Диордица Ирина Николаевна, Филиппова Марина Вячеславовна, Барабаш Ярослав Васильевич
МПК / Мітки
МПК: B23Q 17/22
Мітки: комплекс, здійснення, мікропереміщень, робототехнічний
Код посилання
<a href="https://ua.patents.su/3-30449-robototekhnichnijj-kompleks-dlya-zdijjsnennya-mikroperemishhen.html" target="_blank" rel="follow" title="База патентів України">Робототехнічний комплекс для здійснення мікропереміщень</a>
Робототехнічний комплекс
Номер патенту: 10156
Опубліковано: 15.11.2005
Автори: Пестунов Володимир Михайлович, Павленко Іван Іванович, Крамар Артем Володимирович
МПК: B23Q 39/00
Мітки: робототехнічний, комплекс
Формула / Реферат:
1. Робототехнічний комплекс, що містить переналагоджуваний багатопозиційний агрегатний верстат із затискними пристроями і промисловий робот, який відрізняється тим, що затискні пристрої виконані у вигляді магнітних плит, а робот оснащений щонайменше двокоординатною системою управління переміщення руки та змінними модулями захоплювача заготовки.2. Комплекс за п. 1, який відрізняється тим, що система управління по кожній координаті...
Автоматизований робототехнічний комплекс дистанційного керування для закриття (відкриття) кришок первинних контейнерів з радіоактивними відходами
Номер патенту: 7711
Опубліковано: 15.07.2005
Автори: Зубко Микола Олексійович, Рафалович Михайло Григорович, Кондратенко Віктор Васильович, Бланар Олег Володимирович
МПК: G21F 5/005
Мітки: робототехнічний, автоматизований, комплекс, радіоактивними, керування, відходами, відкриття, дистанційного, первинних, закриття, контейнерів, кришок
Формула / Реферат:
1. Автоматичний робототехнічний комплекс дистанційного керування для закриття (відкриття) кришок первинних контейнерів з радіоактивними відходами, що містить транспортну магістраль, транспортний візок, піддон з первинними контейнерами, кроковий підйомник, касету з кришками, маніпулятор, що містить, в тому числі, гайки в корпусах, механізм переміщення маніпулятора, який відрізняється тим, що гайки, які подають рухому частину маніпулятора з...
Спосіб формування кутових мікропереміщень вала п’єзоелектричного двигуна та п’єзоелектричний двигун, що його реалізує
Номер патенту: 67848
Опубліковано: 15.07.2004
Автор: Петренко Сергій Федорович
МПК: H02N 2/00, H01L 41/09
Мітки: двигун, кутових, п'єзоелектричний, двигуна, формування, вала, реалізує, мікропереміщень, спосіб, п'єзоелектричного
Формула / Реферат:
1. Спосіб формування кутових мікропереміщень вала п’єзоелектричного двигуна, що включає формування пускового моменту за допомогою зворотного п’єзоелектричного ефекту, який відрізняється тим, що кутові мікропереміщення формують з ділянки розгону, на якій прикладено пусковий момент і ділянки гальмування при знятті пускового моменту, при цьому кутові мікропереміщення вала на ділянці розгону формують у відповідності з рівнянням
Комплекс обладнання для здійснення гідроімпульсу в свердловині
Номер патенту: 20819
Опубліковано: 07.10.1997
Автор: Паневник Олександр Васильович
МПК: E21B 31/113
Мітки: обладнання, гідроімпульсу, здійснення, комплекс, свердловини
Формула / Реферат:
Комплекс обладнання для здійснення гідроїмпульсу в свердловині, який містить маніфольд бурового насоса, дросельно-запірний пристрій І колонну головку з клапаном, розміщеним в осьовому каналі корпусу з можливістю обмеженого осьового переміщення і перекриття лінії низького тиску в крайньому нижньому положенні, який відрізняється тим, що він обладнаний струминним апаратом, розміщеним на маніфольді між буровим насосом та дросельно-запірним...
Спосіб проведення галоаерозольної терапії та комплекс для здійснення способу
Номер патенту: 45741
Опубліковано: 15.04.2002
Автори: Кулініч Олексій Валерійович, Верещагін Леонід Аркадійович, Кулініч Валерій Іванович, Верещагін Вячеслав Леонідович
МПК: A61G 10/02
Мітки: комплекс, способу, проведення, спосіб, галоаерозольної, здійснення, терапії
Формула / Реферат:
1. Спосіб проведення галоаерозольної терапії, що передбачає циклічне здійснення терапевтичних сеансів з використанням галотерапевтичного комплексу з лікувальною камерою і полягає у формуванні в лікувальній камері галоаерозольного впливаючого середовища з оптимальними параметрами мікроклімату, зокрема, стосовно терапевтично-оптимальних параметрів температури і вологості повітряного середовища та концентрації іонізованого галоаерозолю, і...
Попередній патент: Спосіб переробки твердих манганвмісних відходів
Наступний патент: Реакційна камера для нанесення дифузійних покриттів
Випадковий патент: Опалювальний водонагрівальний котел