Робототехнічний комплекс
Номер патенту: 10156
Опубліковано: 15.11.2005
Автори: Крамар Артем Володимирович, Пестунов Володимир Михайлович, Павленко Іван Іванович
Формула / Реферат
1. Робототехнічний комплекс, що містить переналагоджуваний багатопозиційний агрегатний верстат із затискними пристроями і промисловий робот, який відрізняється тим, що затискні пристрої виконані у вигляді магнітних плит, а робот оснащений щонайменше двокоординатною системою управління переміщення руки та змінними модулями захоплювача заготовки.
2. Комплекс за п. 1, який відрізняється тим, що система управління по кожній координаті оснащена додатковим контуром, який містить: датчик переміщень, порівняльний механізм, задавальний механізм та керувальний пристрій.
Текст
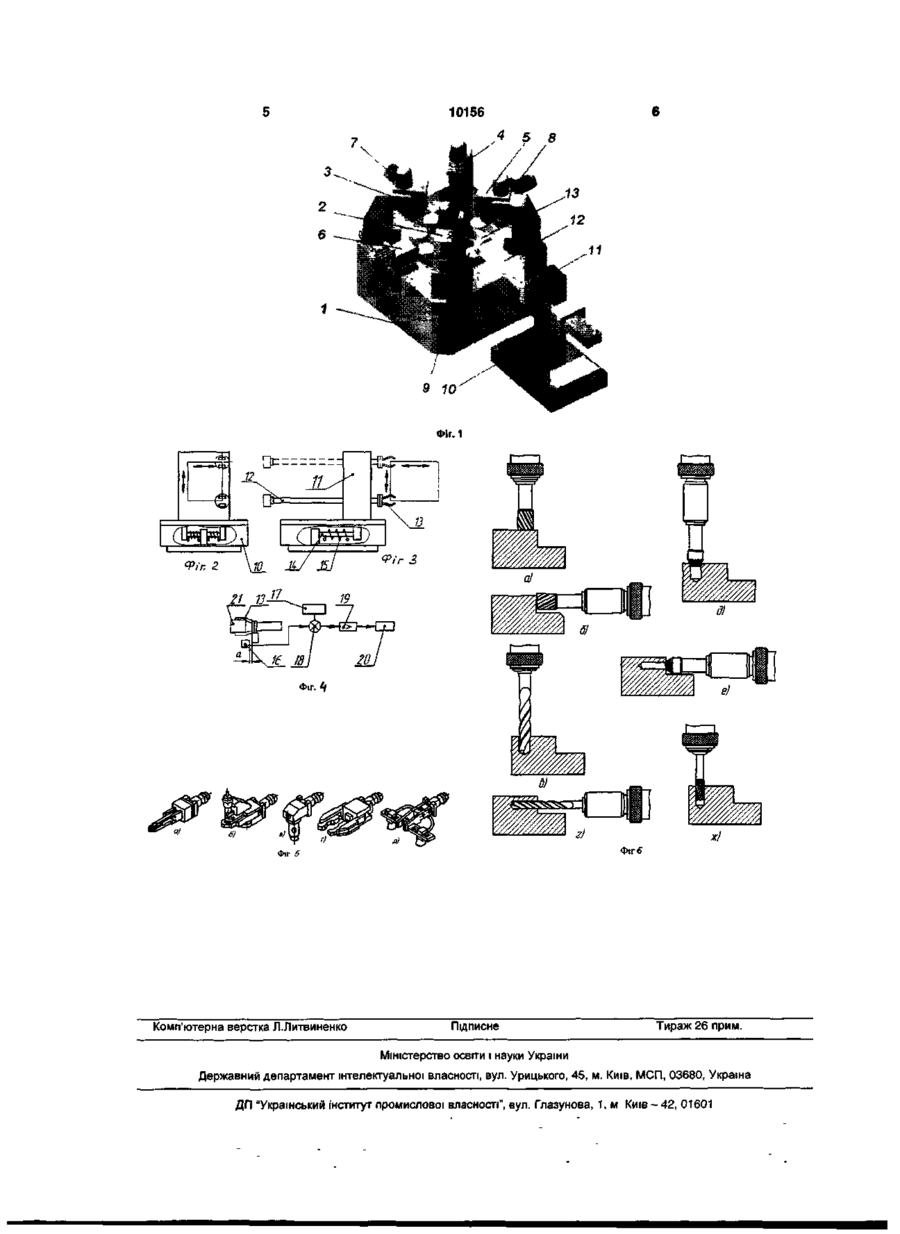
1. Робототехнічний комплекс, що містить переналагоджуваний багатопозиційний агрегатний верстат із затискними пристроями і промисловий робот, який відрізняється тим, що затискні пристрої виконані у вигляді магнітних плит, а робот оснащений щонайменше двокоординатною системою управління переміщення руки та змінними модулями захоплювача заготовки. 2. Комплекс за п.1, який відрізняється тим, що система управління по кожній координаті оснащена додатковим контуром, який містить: датчик переміщень, порівняльний механізм, задавальний механізм та керувальний пристрій. Корисна модель відноситься до галузі машинобудування, а саме, до агрегатних верстатів з ЧПУ, та гнучких модулів. Відомий одноверстатний робототехнічний комплекс, який містить робот, встановлений поряд з верстатом, працюючий в циліндричній системі координат. Завантаження заготовок відбувається за допомогою тактового столу і промислового роботу [1]. Недоліком аналога є те, що він не відповідає вимогам гнучких виробництв та точності обробки. Відомі також комплекти швидкознімних технологічних пристроїв, прийняті за найближчий аналог, якими оснащуються промислові роботи [2]. Недоліком найближчого аналога є те, що він не відповідає вимогам гнучкого виробництва, точності базування при встановленні заготовок та заданій продуктивності. В основу корисної моделі поставлено задачу підвищення гнучкості, розширення технологічних можливостей та підвищення точності обробки завдяки тому, що робототехнічний комплекс, містить переналагоджуємий багатопозиційний агрегатний верстат, затискні пристрої якого виконані у вигляді магнітних плит, та робот оснащений, як мінімум, двокоординатною системою управління переміщення руки та змінними модулями захоплювача заготовки, а система управління по кожній координаті оснащена додатковим контуром який містить: датчик переміщень, механізм що порівнює, механізм що задає та управляючий пристрій. Механізм базування заготовки встановлений на руці робота, механізм затиску виконаний у вигляді магнітної плити, а рука робота оснащена швидкознімними технологічними пристроями та контуром управління. Верстат має станину, на якій розташований поворотний стіл, горизонтальні та вертикальні силові головки, які мають привод головного руху та привод повздовжньої подачі. Конструкція верстата, що пропонується представлена графічними матеріалами, де на Фіг.1 зображено загальний вид верстата, на Фіг.2, 3 кінематична схема робота, на Фіг.4 принципова схема робота, на Фіг.5 комплект змінних модулів для захоплювання заготовки, на Фіг.6 технологія обробки на верстаті. Верстат містить станину 1, вертикальні силові головки 2, 3, 4, 5 та горизонтальні силові головки 6, 7, 8 зі шпинделями, затискні пристосування 9, які мають фіксовані положення згідно технології; робот, який має плиту 10, стійку 11 зі встановленою на ній рукою 12 та захоплювальним пристроєм 13. Всі основні вузли та механізми верстата розташовані на станині 1. Працює верстат так. При завантаженні заготовки на верстат вона закріпляється в затискному захоплювачі 13, розташованому на руці робота 12 (Фіг.1), який виконаний у вигляді змінного модуля захоплювання заготовки. Далі заготовка подається на першу позицію (завантажувальну) де базується і закріплюється за допомогою магнітної плити 9. со CD Ю о> 10156 Точність позиціювання забезпечується тим, що привод точних переміщень виконаний у вигляді магнітострикційного стержня 14 (Фіг.З), послідовно встановленого з передавальним механізмом руху по відповідній координаті. Цей стержень розташований в кінематичному ланцюгу до механізму переміщення по координаті руху, входить в механізм малих переміщень, оснащений замкнутою системою управління переміщенням по відповідній координаті руху захоплювального пристрою 13, яка включає датчик, пристрої що задають та порівнюють. Привод робота з передавальними механізмами по числу ступенів свободи переміщення захоплювального пристрою 13 розташований в основі 10. В основі 10 також розташовані механізми малих переміщень, які показані на схемі Фіг.З і вміщує стержень 14 та котушку 15. При підході в зону фіксації положення руки робота механізми переміщення вимикаються, рука 12 фіксується і затискний захоплювач 13 зупиняється в зоні дії датчика 16. Якщо зазор „а" (Фіг.4) відрізняється від заданого механізмом 17, то з механізму 18 подається сигнал, який через підсилювач 19 пройде до управляючого пристрою 20. Пристрій 20 управляє системою живлення (не показаній на схемі) котушкою 15 магнітострикційного механізму малих переміщень заготовки 21 (Фіг.4). Корекція переміщення по відповідній координаті здійснюється до тих пір, поки зазор „а" не стане рівним заданому. Після чого переміщення деталі по координаті припиниться. Аналогічно здійснюється корекція переміщень по будь якій координаті у відповідності з переміщеннями затискного захоплювача 13. Приведені вище механізми забезпечують високу жорсткість виконавчого органу, що підвищує точність позиціювання. В комплекті змінних модулів (Фіг.5) захоплювача заготовки вони відрізняються по типу поверхонь базування заготовки, та по принципу дії. Захоплювання здійснюється: а) по двом площинам; б) одночасно по зовнішній та внутрішній циліндричним поверхням; в) по внутрішній циліндричній поверхні; г) по зовнішній циліндричній поверхні; д) по двом отворам. Згідно з позиціями верстата можлива техноло гія обробки буде мати вигляд (Фіг.6): перша позиція - завантажувальна; а) друга позиція - вертикальне фрезерування площини (Фіг.ба); б) третя позиція - горизонтальне фрезерування площини (Фіг.бб); в) четверта позиція - свердління отворів (Фіг.бв); г) п'ята позиція - горизонтальне свердління отворів (Фіг.бг); д) шоста позиція - зенкерування фасок (Фіг.бд); є) сьома позиція - зенкерування фасок (Фіг.бе); ж) восьма позиція - зенкерування отворів (Фіг.бж). Такий ефект невідомий і складає істотні відмінності схеми, що розглядається. ВІДМІННОСТІ, ЩО описані у формулі відповідають вимогам гнучких виробництв та забезпечують розширення технологічних можливостей модуля. Гнучкий модуль може виконувати: 1. Фрезерування поверхонь; 2. Свердління отворів; 3. Зенкерування отворів; 4. Фрезерування фасонних поверхонь; 8. Фрезерування поздовжніх канавок та шпонкових пазів. 9. Нарізання різьби. Економічна ефективність досягається за рахунок гнучкості, підвищення точності та розширення технологічних можливостей. Розширення технологічних можливостей скорочує число використовуємих верстатів та роботів, що їх обслуговують у гнучких автоматизованих виробництвах. Верстат, що пропонується, можливо використовувати у дрібносерійному та багатосерійному виробництвах верстатоінструментальній та машинобудівній промисловостях. Джерела інформації: 1. Черпаков Б.И., Великович В.Б. "Гибкие производственные системы, промышленные роботы, робототехнические комплексы": Робототехнические комплексы. Под ред. Черпакова Б.И. -М.: Высш. шк., 1989. -95с: ил, стр.8, рис.1 в. 2. Ямпольский Л.С. "Гибкие автоматизированные производственные системы": К.: Техника, 1985. -280с, стр.229, рис.59. 10156 11 Фіг. 1 JL ІШЩ) Фіг. Фіг € Комп'ютерна верстка Л.Литвиненко Підписне Тираж 26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП "Український інститут промислової власності", вул. Глазунова, 1, м Київ - 4 2 , 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюRobotic complex
Автори англійськоюPavlenko Ivan Ivanovych, Pestunov Volodymyr Mykhailovych
Назва патенту російськоюРобототехнический комплекс
Автори російськоюПавленко Иван Иванович, Пестунов Владимир Михайлович
МПК / Мітки
МПК: B23Q 39/00
Мітки: комплекс, робототехнічний
Код посилання
<a href="https://ua.patents.su/4-10156-robototekhnichnijj-kompleks.html" target="_blank" rel="follow" title="База патентів України">Робототехнічний комплекс</a>
Автоматизований робототехнічний комплекс дистанційного керування для закриття (відкриття) кришок первинних контейнерів з радіоактивними відходами
Номер патенту: 7711
Опубліковано: 15.07.2005
Автори: Рафалович Михайло Григорович, Кондратенко Віктор Васильович, Бланар Олег Володимирович, Зубко Микола Олексійович
МПК: G21F 5/005
Мітки: закриття, комплекс, дистанційного, кришок, відкриття, первинних, керування, контейнерів, автоматизований, радіоактивними, робототехнічний, відходами
Формула / Реферат:
1. Автоматичний робототехнічний комплекс дистанційного керування для закриття (відкриття) кришок первинних контейнерів з радіоактивними відходами, що містить транспортну магістраль, транспортний візок, піддон з первинними контейнерами, кроковий підйомник, касету з кришками, маніпулятор, що містить, в тому числі, гайки в корпусах, механізм переміщення маніпулятора, який відрізняється тим, що гайки, які подають рухому частину маніпулятора з...
Автоматизований складальний комплекс

Номер патенту: 61472
Опубліковано: 17.11.2003
Автори: Драпак Георгій Мефодійович, Горященко Сергій Леонідович, Панчук Володимир Васильович
МПК: A43D 111/00
Мітки: комплекс, складальний, автоматизований
Формула / Реферат:
Автоматизований складальний комплекс, що містить закріплений на станині механізм для подачі деталей на позицію складання, який встановлений на штоці силового циліндра і оснащений кареткою, що несе засоби для поштучного відокремлення і маніпулювання деталями, пристрій для завантаження деталей з блоком касет, встановлених за допомогою напрямних, та пов'язаний з ним механізм для підтримання постійного рівня верхньої деталі, а також пристосування...
Мобільний комплекс для ізоляції радіоактивних відходів від навколишнього середовища
Номер патенту: 4260
Опубліковано: 17.01.2005
Автори: Нікітін Володимир Юхимович, Вовненко Генадій Миколайович, Невідомський Володимир Олександрович
МПК: G21F 9/34
Мітки: комплекс, ізоляції, навколишнього, відходів, радіоактивних, мобільній, середовища
Формула / Реферат:
1. Мобільний комплекс для ізоляції радіоактивних відходів від навколишнього середовища, що містить механізм завантаження, виконаний у вигляді привідного візка з вантажопідйомним засобом, і бокси затарювання, який відрізняється тим, що він оснащений двома суміжними порталами, кожний із яких установлений з можливістю повздовжнього переміщення по напрямних, а бокси затарювання радіоактивних відходів виконані у вигляді залізобетонних посудин, які...
Комплекс автоматизованого контролю герметичності консервних банок
Номер патенту: 47139
Опубліковано: 17.06.2002
Автор: Ощипок Ігор Миколайович
МПК: G01M 3/06
Мітки: консервних, автоматизованого, комплекс, герметичності, контролю, банок
Формула / Реферат:
1. Комплекс автоматизованого контролю герметичності консервних банок, який містить ванну з рідиною, конус, встановлений в рідині, джерело світла, фотоприймач, який відрізняється тим, що введено робот, оснащений конусом-захоплювачем, що містить pyxомі конічні клешні робота, з’єднані з рухомими щоками, розташованими з обох боків конічних клешень з їх приводами з можливістю автоматизованого реагування роботом від сигналу фотореле для вилучення...
Комплекс рятувальний прохідницький

Номер патенту: 60443
Опубліковано: 15.10.2003
Автори: Смоланов Сергій Миколайович, Москаленко Олександр Володимирович, Колесов Орест Андрійович, Беркович Ізя Мойсейович, Боровенський Олександр Петрович, Вігдергауз Леонід Павлович, Клименко Юрій Володимирович
МПК: E21F 11/00
Мітки: рятувальний, прохідницький, комплекс
Формула / Реферат:
Комплекс рятувальний прохідницький, що включає механізм подачі, гідродомкрати, маслостанцію, який відрізняється тим, що має буровий орган з гідравлічним приводом, пристрій, що за допомогою гідродомкратів забезпечує розпір у виробці, подачу бурового органа на вибій, підтягування комплексу і зміну його напрямку від осьової лінії на задані кути, дисковий конвеєр, що вигинається, з гідромотором і гідросистему з високотисковими шлангами,...
Попередній патент: Спосіб герніопластики при післяопераційних грижах живота
Наступний патент: Шків автоматично регульованої пасової передачі
Випадковий патент: Спосіб паралельного ключового хешування