Мікропроцесорна система керування тяговою передачею локомотива
Номер патенту: 31106
Опубліковано: 25.03.2008
Автори: Спірягін Максим Ігорович, Клюєв Сергій Олександрович, Кашура Олександр Леонідович, Спірягін Валентин Ігорович
Формула / Реферат
Мікропроцесорна система керування тяговою передачею локомотива, що містить мікропроцесорний блок з головним мікропроцесором, блок керування тяговими електродвигунами, блок опрацювання сигналів датчиків, блок діагностичних пристроїв та блок визначення лінійної швидкості з радаром, працюючим за ефектом Доплера, яка відрізняється тим, що мікропроцесорний блок з головним мікропроцесором використовує критерій зчеплення, який згодом регулюється відповідно до звукового сигналу, отриманого від контакту колеса з рейкою, система оснащена блоком керування тиском повітря в гальмових циліндрах, блоком керування подачею піску, блоком контролю і обробки звукових сигналів з контакту колеса з рейкою та звуковими датчиками.
Текст
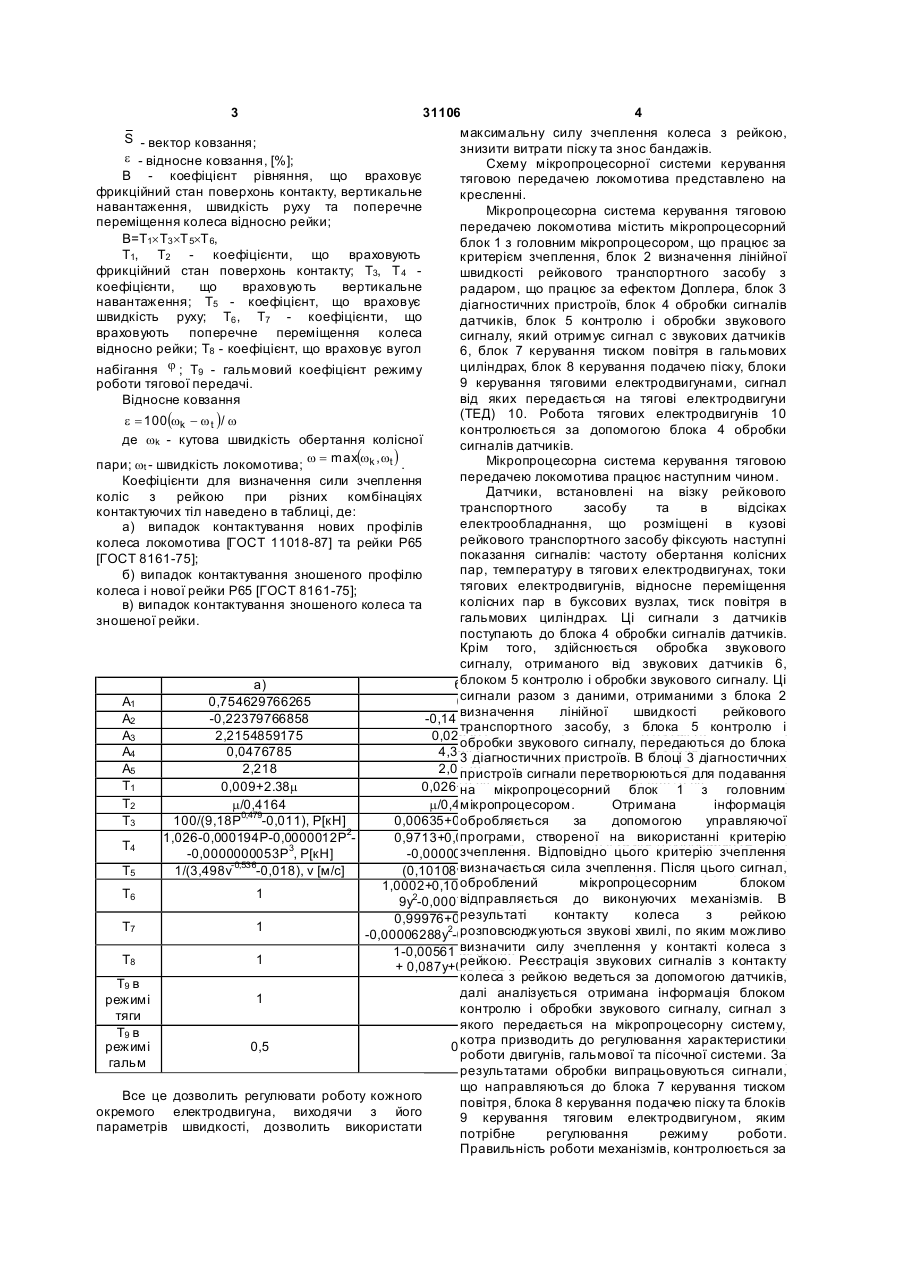
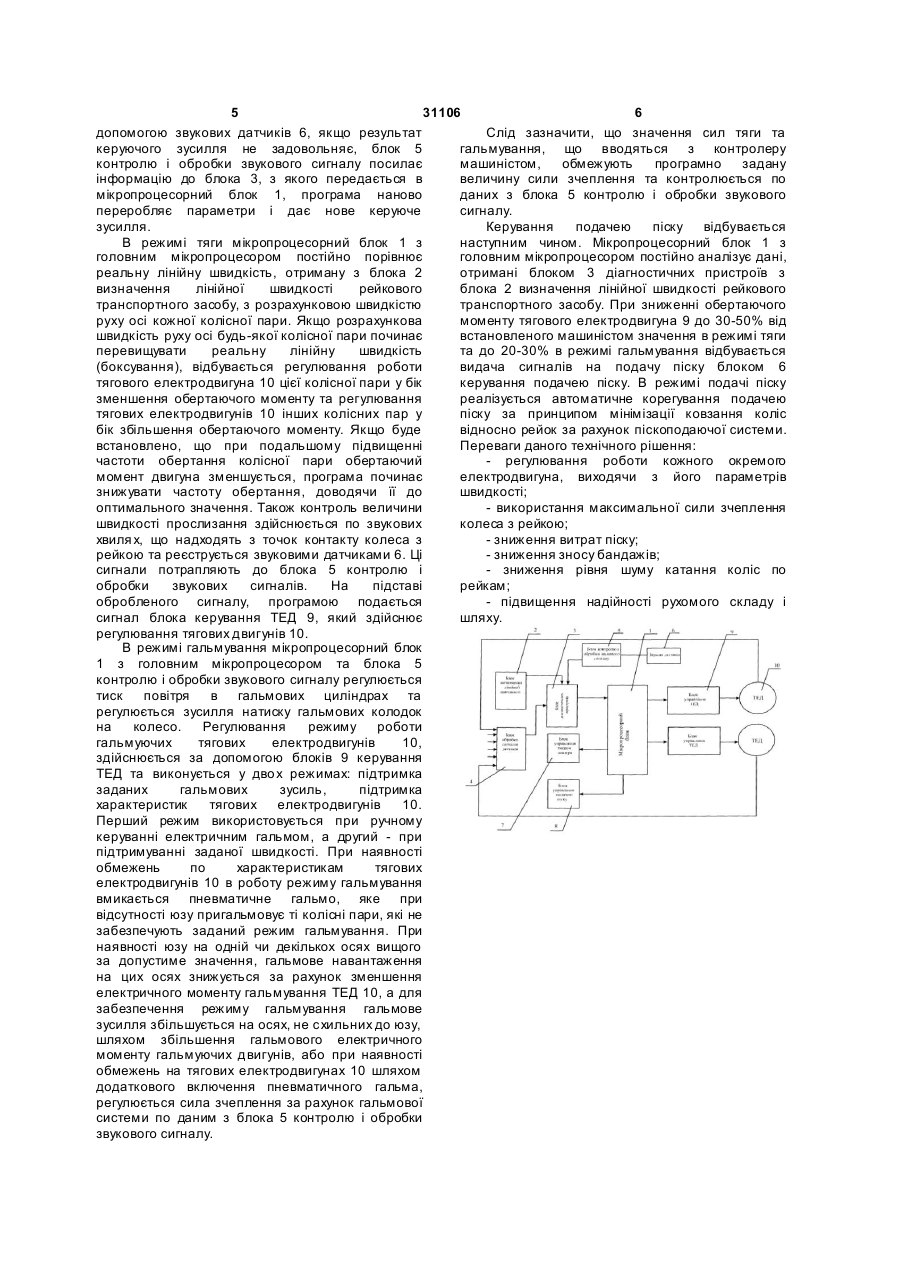
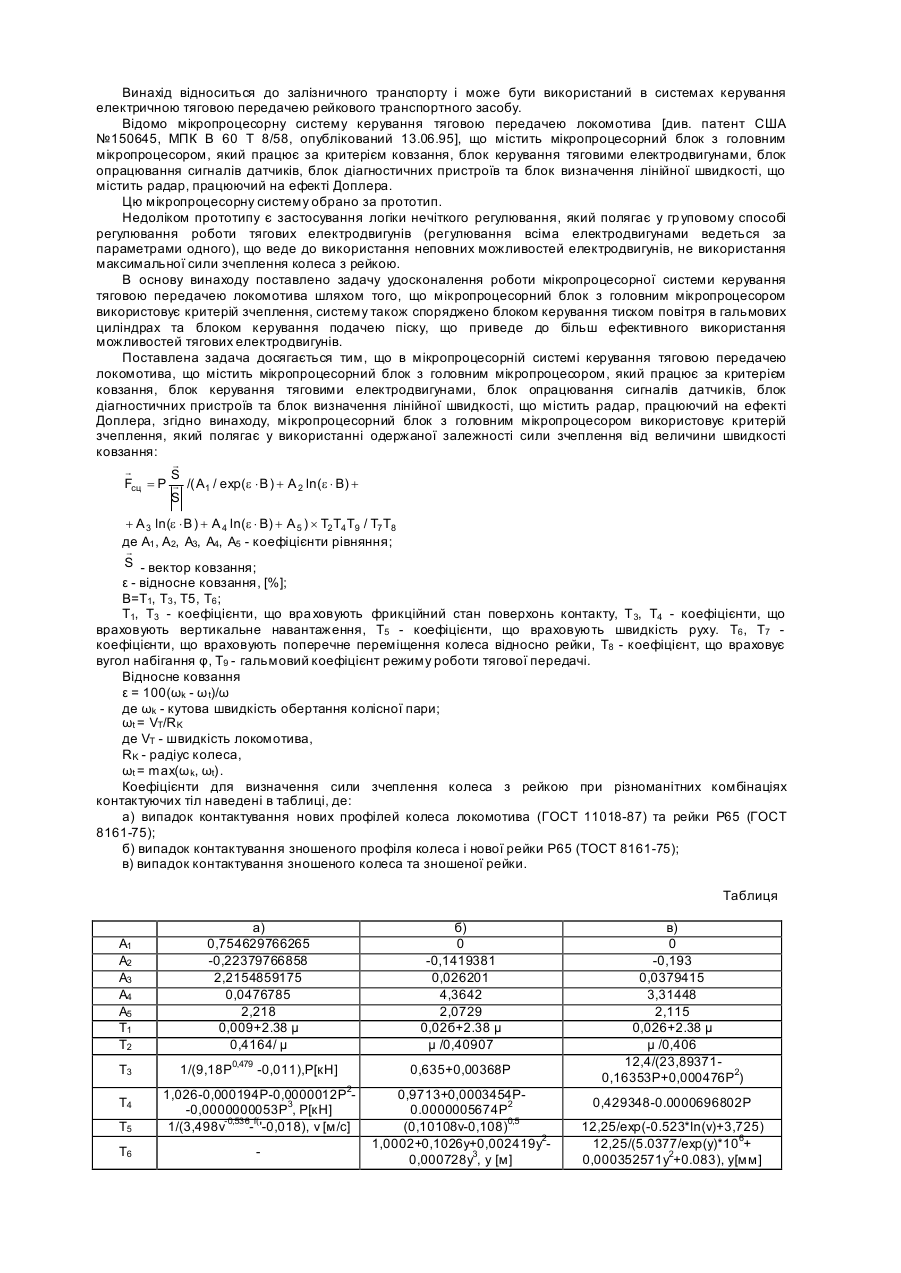
Мікропроцесорна система керування тяговою передачею локомотива, що містить мікропроцесорний блок з головним 3 31106 4 максимальну силу зчеплення колеса з рейкою, S - вектор ковзання; знизити витрати піску та знос бандажів. e - відносне ковзання, [%]; Схему мікропроцесорної системи керування В - коефіцієнт рівняння, що враховує тяговою передачею локомотива представлено на фрикційний стан поверхонь контакту, вертикальне кресленні. навантаження, швидкість руху та поперечне Мікропроцесорна система керування тяговою переміщення колеса відносно рейки; передачею локомотива містить мікропроцесорний В=Т1´T3 ´T 5´Т 6, блок 1 з головним мікропроцесором, що працює за Т1, Т2 - коефіцієнти, що враховують критерієм зчеплення, блок 2 визначення лінійної фрикційний стан поверхонь контакту; Т3, Т 4 швидкості рейкового транспортного засобу з коефіцієнти, що враховують вертикальне радаром, що працює за ефектом Доплера, блок 3 навантаження; Т5 - коефіцієнт, що враховує діагностичних пристроїв, блок 4 обробки сигналів швидкість руху; Т6 , Т7 - коефіцієнти, що датчиків, блок 5 контролю і обробки звукового враховують поперечне переміщення колеса сигналу, який отримує сигнал с звукових датчиків відносно рейки; Т8 - коефіцієнт, що враховує вугол 6, блок 7 керування тиском повітря в гальмових циліндрах, блок 8 керування подачею піску, блоки набігання j ; Т9 - гальмовий коефіцієнт режиму 9 керування тяговими електродвигунами, сигнал роботи тягової передачі. від яких передається на тягові електродвигуни Відносне ковзання (ТЕД) 10. Робота тягових електродвигунів 10 e = 100(wk - w t )/ w контролюється за допомогою блока 4 обробки де wk - кутова швидкість обертання колісної сигналів датчиків. Мікропроцесорна система керування тяговою пари; wt - швидкість локомотива; w = max(wk , wt ) . передачею локомотива працює наступним чином. Коефіцієнти для визначення сили зчеплення Датчики, встановлені на візку рейкового коліс з рейкою при різних комбінаціях транспортного засобу та в відсіках контактуючих тіл наведено в таблиці, де: електрообладнання, що розміщені в кузові а) випадок контактування нових профілів рейкового транспортного засобу фіксують наступні колеса локомотива [ГОСТ 11018-87] та рейки Р65 показання сигналів: частоту обертання колісних [ГОСТ 8161-75]; пар, температуру в тягови х електродвигунах, токи б) випадок контактування зношеного профілю тягових електродвигунів, відносне переміщення колеса і нової рейки Р65 [ГОСТ 8161-75]; колісних пар в буксових вузлах, тиск повітря в в) випадок контактування зношеного колеса та гальмових циліндрах. Ці сигнали з датчиків зношеної рейки. поступають до блока 4 обробки сигналів датчиків. Крім того, здійснюється обробка звукового Таблиця сигналу, отриманого від звукових датчиків 6, блоком 5 контролю і обробки звукового сигналу. Ці а) б) в) сигнали разом з даними, отриманими з блока 2 А1 0,754629766265 0 0 визначення лінійної швидкості рейкового А2 -0,22379766858 -0,1419381 -0,193 транспортного засобу, з блока 5 контролю і А3 2,2154859175 0,026201 0,0379415 обробки звукового сигналу, передаються до блока А4 0,0476785 4,3642 3,31448 3 діагностичних пристроїв. В блоці 3 діагностичних А5 2,218 2,0729 2,115 пристроїв сигнали перетворюються для подавання Т1 0,009+2.38m 0,026+2.38m 0,026+2.38m головним на мікропроцесорний блок 1 з Т2 m/0,4164 m/0,40907 мікропроцесором. Отримана m/0,406 інформація Т3 100/(9,18Р0,479-0,011), Р[кН] 0,00635+0,0000368Р обробляється 12,4/(0,2389371-1,6353Р+4,76Р2) за допомогою управляючої програми, 1,026-0,000194Р-0,0000012Р20,9713+0,0003454 Р- створеної на використанні критерію Т4 0,429348-0,0000696802Р зчеплення. Відповідно цього критерію зчеплення -0,0000000053Р3, Р[кH] -0,0000005674Р2 -0,536 0,5 визначається сила 12,25/ехр(-0.523*ln(v)+3,725) зчеплення. Після цього сигнал, Т5 1/(3,498v -0,018), v [м/с] (0,10108v-0,108) 6 оброблений мікропроцесорним 1,0002+0,1026у+0,00241 12,25/(5,0377/ехр(у)*10блоком + Т6 1 2 3 відправляється до виконуючих2+0,083), у[мм] В механізмів. 9у -0,000728y , у[м] +0,000352571у результаті контакту1/(0,00000747/ехр(у)+рейкою колеса з 0,99976+0,0059684уТ7 1 розповсюджуються звукові хвилі, по якиму[мм] -0,00006288y2-0,0000577856y3 +0,00063638у+2,37), можливо визначити 1-0,00561 ф| (0,105 + силу зчеплення у контакті колеса з Т8 1 1 рейкою. Реєстрація звукових сигналів з контакту + 0,087у+0,01156у2)) колеса з рейкою ведеться за допомогою датчиків, Т9 в далі аналізується отримана інформація блоком 1 1 1 режимі контролю і обробки звукового сигналу, сигнал з тяги якого передається на мікропроцесорну систему, Т9 в котра призводить до регулювання характеристики режимі 0,5 0,5 0,5 роботи двигунів, гальмової та пісочної системи. За гальм результатами обробки випрацьовуються сигнали, що направляються до блока 7 керування тиском Все це дозволить регулювати роботу кожного повітря, блока 8 керування подачею піску та блоків окремого електродвигуна, виходячи з його 9 керування тяговим електродвигуном, яким параметрів швидкості, дозволить використати потрібне регулювання режиму роботи. Правильність роботи механізмів, контролюється за 5 31106 6 допомогою звукових датчиків 6, якщо результат Слід зазначити, що значення сил тяги та керуючого зусилля не задовольняє, блок 5 гальмування, що вводяться з контролеру контролю і обробки звукового сигналу посилає машиністом, обмежують програмно задану інформацію до блока 3, з якого передається в величину сили зчеплення та контролюється по мікропроцесорний блок 1, програма наново даних з блока 5 контролю і обробки звукового переробляє параметри і дає нове керуюче сигналу. зусилля. Керування подачею піску відбувається В режимі тяги мікропроцесорний блок 1 з наступним чином. Мікропроцесорний блок 1 з головним мікропроцесором постійно порівнює головним мікропроцесором постійно аналізує дані, реальну лінійну швидкість, отриману з блока 2 отримані блоком 3 діагностичних пристроїв з визначення лінійної швидкості рейкового блока 2 визначення лінійної швидкості рейкового транспортного засобу, з розрахунковою швидкістю транспортного засобу. При зниженні обертаючого руху осі кожної колісної пари. Якщо розрахункова моменту тягового електродвигуна 9 до 30-50% від швидкість руху осі будь-якої колісної пари починає встановленого машиністом значення в режимі тяги перевищувати реальну лінійну швидкість та до 20-30% в режимі гальмування відбувається (боксування), відбувається регулювання роботи видача сигналів на подачу піску блоком 6 тягового електродвигуна 10 цієї колісної пари у бік керування подачею піску. В режимі подачі піску зменшення обертаючого моменту та регулювання реалізується автоматичне корегування подачею тягових електродвигунів 10 інших колісних пар у піску за принципом мінімізації ковзання коліс бік збільшення обертаючого моменту. Якщо буде відносно рейок за рахунок піскоподаючої системи. встановлено, що при подальшому підвищенні Переваги даного технічного рішення: частоти обертання колісної пари обертаючий - регулювання роботи кожного окремого момент двигуна зменшується, програма починає електродвигуна, виходячи з його параметрів знижувати частоту обертання, доводячи її до швидкості; оптимального значення. Також контроль величини - використання максимальної сили зчеплення швидкості прослизання здійснюється по звукових колеса з рейкою; хвиля х, що надходять з точок контакту колеса з - зниження витрат піску; рейкою та реєструється звуковими датчиками 6. Ці - зниження зносу бандажів; сигнали потрапляють до блока 5 контролю і - зниження рівня шуму катання коліс по обробки звукових сигналів. На підставі рейкам; обробленого сигналу, програмою подається - підвищення надійності рухомого складу і сигнал блока керування ТЕД 9, який здійснює шляху. регулювання тягових двигунів 10. В режимі гальмування мікропроцесорний блок 1 з головним мікропроцесором та блока 5 контролю і обробки звукового сигналу регулюється тиск повітря в гальмових циліндрах та регулюється зусилля натиску гальмових колодок на колесо. Регулювання режиму роботи гальмуючих тягових електродвигунів 10, здійснюється за допомогою блоків 9 керування ТЕД та виконується у дво х режимах: підтримка заданих гальмових зусиль, підтримка характеристик тягових електродвигунів 10. Перший режим використовується при ручному керуванні електричним гальмом, а другий - при підтримуванні заданої швидкості. При наявності обмежень по характеристикам тягових електродвигунів 10 в роботу режиму гальмування вмикається пневматичне гальмо, яке при відсутності юзу пригальмовує ті колісні пари, які не забезпечують заданий режим гальмування. При наявності юзу на одній чи декількох осях вищого за допустиме значення, гальмове навантаження на цих осях знижується за рахунок зменшення електричного моменту гальмування ТЕД 10, а для забезпечення режиму гальмування гальмове зусилля збільшується на осях, не схильних до юзу, шляхом збільшення гальмового електричного моменту гальмуючих двигунів, або при наявності обмежень на тягових електродвигунах 10 шляхом додаткового включення пневматичного гальма, регулюється сила зчеплення за рахунок гальмової системи по даним з блока 5 контролю і обробки звукового сигналу.
ДивитисяДодаткова інформація
Назва патенту англійськоюMicroprocessor system for control of traction transmission of locomotive
Автори англійськоюSpiriahin Maksym Ihorovych, Spiriahin Valentyn Ihorovych, Kashura Oleksandr Leonidovych, Kliuiev Serhii Oleksandrovych
Назва патенту російськоюМикропроцессорная система управления тяговой передачей локомотива
Автори російськоюСпирягин Максим Игоревич, Спирягин Валентин Игоревич, Кашура Александр Леонидович, Клюев Сергей Александрович
МПК / Мітки
МПК: B61F 5/38
Мітки: мікропроцесорна, керування, локомотива, передачею, тяговою, система
Код посилання
<a href="https://ua.patents.su/3-31106-mikroprocesorna-sistema-keruvannya-tyagovoyu-peredacheyu-lokomotiva.html" target="_blank" rel="follow" title="База патентів України">Мікропроцесорна система керування тяговою передачею локомотива</a>
Мікропроцесорна система керування тяговою передачею локомотива
Номер патенту: 65187
Опубліковано: 15.03.2004
Автори: Вівденко Юрій Григорійович, Спірягін Валентин Ігоревич, Белозьорова Вікторія Володимирівна, Кашура Олександр Леонідович, Поляченко Олена Юріївна, Спірягін Максим Ігоревич, Горбунов Микола Іванович
МПК: B60T 8/58
Мітки: система, мікропроцесорна, керування, локомотива, тяговою, передачею
Формула / Реферат:
Мікропроцесорна система керування тяговою передачею локомотива, що містить мікропроцесорний блок з головним мікропроцесором, який працює за критерієм ковзання, блок керування тяговими електродвигунами, блок опрацювання сигналів датчиків, блок діагностичних пристроїв та блок визначення лінійної швидкості, що містить радар, працюючий на ефекті Доплера, яка відрізняється тим, що мікропроцесорний блок з головним мікропроцесором використовує...
Мікропроцесорна система керування сортуванням напівтуш худоби і свиней
Номер патенту: 67127
Опубліковано: 15.06.2004
Автори: Береза Іван Григорович, Занічковська Любов Володимирівна, Ощипок Ігор Миколайович
Мітки: мікропроцесорна, система, худоби, керування, напівтуш, свиней, сортуванням
Формула / Реферат:
1. Мікропроцесорна система керування сортуванням напівтуш худоби і свиней, що містить транспортуючий шлях, вантажонесучі елементи з гаками, розподілювальну станцію, фотодатчик, світловідбивач, візки-накопичувачі, яка відрізняється тим, що вона містить додатково обойму, калібровану пружину, стрижень з феромагнітного матеріалу, котушку індуктивності, підсилювач-перетворювач, аналогово-цифровий перетворювач, шину даних, мікропроцесор, блок...
Система керування функціональними режимами радіолокаційної станції
Номер патенту: 30978
Опубліковано: 25.03.2008
Автори: Шматков Сергій Ігорович, Вовк Олександр Іванович, Карлов Володимир Дмитрович, Челпанов Артем Володимирович
МПК: G01S 13/52
Мітки: режимами, станції, система, керування, радіолокаційної, функціональними
Формула / Реферат:
Система керування функціональними режимами радіолокаційної станції (РЛС), що містить вузол обробки інформації, вузол керування ресурсами РЛС та вузол керування режимом супроводу у складі послідовно включених блока класифікації, блока розподілу заявок на супровід цілей і блока оцінки потрібної енергії, яка відрізняється тим, що додатково введені: послідовно з'єднані блок оцінки інтенсивності потоку цілей і блок групування цілей, послідовно...
Система керування швидкісним пасажирським електропоїздом
Номер патенту: 29142
Опубліковано: 10.01.2008
Автори: Ліпп Андреас, Гапановіч Валентін Алєксандров, Лутц Ханс-Юрген, Розенберг Єфім Наумовіч, Назаров Алєксандр Станіславо, Зурм Міхаель
МПК: B60L 15/20
Мітки: пасажирським, електропоїздом, система, керування, швидкісним
Формула / Реферат:
Система керування швидкісним пасажирським електропоїздом, що містить обчислювальний блок, який складається з двох сполучених між собою центральних процесорів, один з яких є резервним, входи/виходи обчислювального блока сполучені з багатофункціональною поїзною шиною, до якої підключений пульт керування машиніста, допоміжне обладнання, блок керування та контролю приводом і блок керування гальмом, додаткові входи/виходи блока керування та...
Пісочна система локомотива
Номер патенту: 15167
Опубліковано: 15.06.2006
Автор: Шапран Євген Миколайович
МПК: B61C 15/00
Мітки: пісочна, локомотива, система
Формула / Реферат:
Пісочна система локомотива, що містить джерело живлення, бункери з піском, сполучені трубопроводами з першою, другою, третьою, четвертою, п'ятою, шостою, сьомою і восьмою пісочними форсунками, перший, другий, третій, четвертий, п'ятий, шостий, сьомий і восьмий повітророзподілювачі, живильні входи яких з'єднані через роз'єднувальні крани першого та другого візків з повітряною магістраллю локомотива, а виходи через трубопроводи - з входами для...