Система керування швидкісним пасажирським електропоїздом
Номер патенту: 29142
Опубліковано: 10.01.2008
Автори: Розенберг Єфім Наумовіч, Ліпп Андреас, Зурм Міхаель, Назаров Алєксандр Станіславо, Гапановіч Валентін Алєксандров, Лутц Ханс-Юрген
Формула / Реферат
Система керування швидкісним пасажирським електропоїздом, що містить обчислювальний блок, який складається з двох сполучених між собою центральних процесорів, один з яких є резервним, входи/виходи обчислювального блока сполучені з багатофункціональною поїзною шиною, до якої підключений пульт керування машиніста, допоміжне обладнання, блок керування та контролю приводом і блок керування гальмом, додаткові входи/виходи блока керування та контролю приводом і блока керування гальмом сполучені з відповідними входами/виходами засобу вимірювання параметрів руху поїзда, яка відрізняється тим, що додатково введені мікропроцесорний блок, пристрій приймання сигналів автоматичної локомотивної сигналізації, блок пам'яті, пристрій супутникової навігації, блок індикації та введення інформації, цифровий радіоканал, формувач команд автостопного гальмування, блок керування засобами пневматичного гальмування, датчик шляху та швидкості і датчик тиску у гальмівній магістралі, при цьому пристрій приймання сигналів автоматичної локомотивної сигналізації, блок пам'яті, пристрій супутникової навігації, цифровий радіоканал, датчик шляху та швидкості і датчик тиску у гальмівній магістралі сполучені з відповідними входами мікропроцесорного блока, до виходів якого підключений блок індикації і формувач команд автостопного гальмування, сполучений з першим входом блока керування засобами пневматичного гальмування, другий вхід якого підключений до виходу блока керування гальмом, блок керування засобами пневматичного гальмування складається з елементів керування гальмівною магістраллю, а додаткові входи і виходи мікропроцесорного блока підключені через шлюз до багатофункціональної поїзної шини.
Текст
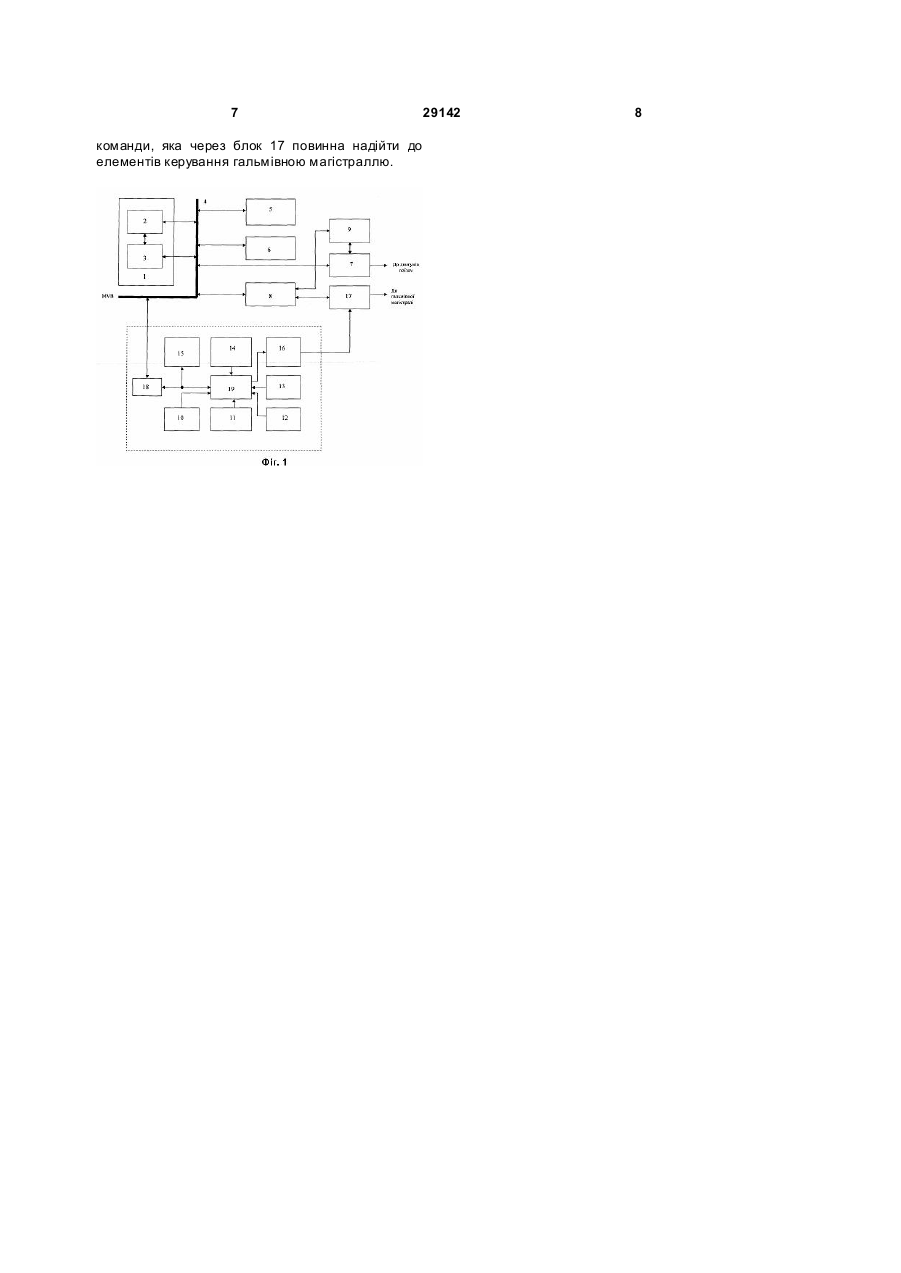
Система керування швидкісним пасажирським електропоїздом, що містить обчислювальний блок, який складається з двох сполучених між собою центральних процесорів, один з яких є резервним, входи/ви ходи обчислювального блока сполучені з багатофункціональною поїзною шиною, до якої підключений пульт керування машиніста, допоміжне обладнання, блок керування та контролю приводом і блок керування гальмом, додаткові входи/виходи блока керування та контролю приводом і блока керування гальмом сполучені з відповідними входами/виходами U 2 (19) 1 3 29142 Зазначена задача вирішується за рахунок того, що у системі керування швидкісним пасажирським електропоїздом, що містить обчислювальний блок, який складається з двох сполучених між собою центральних процесорів, один з яких є резервним, входи/ви ходи обчислювального блока сполучені з багатофункціональною поїзною шиною, до якої підключений пульт керування машиніста, допоміжне обладнання, блок керування та контролю приводом і блок керування гальмом, додаткові входи/виходи блока керування та контролю приводом і блока керування гальмом сполучені з відповідними входами/виходами засобу вимірювання параметрів руху поїзда, додатково введені мікропроцесорний блок, пристрій приймання сигналів автоматичної локомотивної сигналізації, блок пам'яті, пристрій суп утникової навігації, блок індикації та введення інформації, цифровий радіоканал, формувач команд автостопного гальмування, блок керування засобами пневматичного гальмування, датчик шляху та швидкості і датчик тиску у гальмівній магістралі, при цьому пристрій приймання сигналів автоматичної локомотивної сигналізації, блок пам'яті, пристрій супутникової навігації, цифровий радіоканал, датчик шляху та швидкості і датчик тиску у гальмівній магістралі сполучені з відповідними входами мікропроцесорного блока, до виходів якого підключені блок індикації та введення інформації і формувач команд автостопного гальмування, сполучений з першим входом блока керування засобами пневматичного гальмування, другий вхід якого підключений до виходу блока керування гальмом, блок керування засобами пневматичного гальмування складається з елементів керування гальмівною магістраллю, а додаткові входи і виходи мікропроцесорного блока підключені через шлюз до багатофункціональної поїзної шини. Вище перелічена сукупність ознак дозволяє забезпечити для машиніста спрощену роботу системи керування швидкісним пасажирським електропоїздом на всьому протязі шляху, що включає ділянки з різними родами живильної мережі, за рахунок використання у системі безпеки засобів» що отримують інформацію про місцезнаходження через резервовану супутникову систему визначення місцезнаходження Glonass і GPS. На фігурі показана функціональна схема системи керування швидкісним пасажирським електропоїздом. Система керування швидкісним пасажирським електропоїздом містить обчислювальний блок 1, до складу якого входять основний центральний процесор 2, сполучений з резервним центральним процесором 3, входи/виходи обчислювального блока сполучені з багатофункціональною поїзною шиною 4, до якої підключені пульт 5 керування машиніста, допоміжне обладнання б, блок 7 керування та контролю приводом і блок 8 керування гальмом. Додаткові входи/виходи блока 7 керування та контролю приводом і блока 8 керування гальмом сполучені з відповідними 4 входами/виходами засобу 9 вимірювання параметрів руху поїзда. Система також містить мікропроцесорний блок 19, з відповідними входами якого сполучені пристрій 10 приймання сигналів автоматичної локомотивної сигналізації, блок 11 пам'яті з електронною картою, пристрій 12 суп утникової навігації, цифровий радіоканал 13, датчики 14 шляху і швидкості та тиску у гальмівній магістралі. До виходів мікропроцесорного блока 19 підключені блок 15 індикації та введення інформації і формувач 1 б команд автостопного гальмування, сполучений з першим входом блока 17 керування засобами пневматичного гальмування, другий вхід якого підключений до виходу блока 8 керування гальмом. Блок 17 керування засобами пневматичного гальмування складається з елементів керування гальмівною магістраллю, а додаткові входи і виходи мікропроцесорного блока 19 підключені через шлюз 18 до багатофункціональної поїзної шини 4. Блок 15 індикації та введення інформації, сполучений з мікропроцесорним блоком 19 і за допомогою шлюзу 18 та багатофункціональної поїзної шини 4 - з обчислювальним блоком 1, забезпечує відображення інформації про роботу основних та допоміжних засобів, необхідної машиністу. Мікропроцесорний блок 19 забезпечує прийом та обробку інформації від пристрою 10 приймання сигналів автоматичної локомотивної сигналізації, з блока 11 пам'яті з електронною картою, від пристрою 12 супутникової навігації, на який надходить інформація про місцезнаходження через резервовану супутникову систему визначення місцезнаходження Glonass і GPS, з цифрового радіоканалу 13, а також від датчиків 14 шляху і швидкості та тиску у гальмівній магістралі. Мікропроцесорний блок 19 через формувач 16 команд автостопного гальмування сполучений з блоком 17 керування засобами пневматичного гальмування, вихід якого з'єднаний безпосередньо з елементами керування гальмівної магістралі. Система керування швидкісним пасажирським електропоїздом працює наступним чином. За допомогою пульта 5 керування машиніста, що включає інтерфейс «машиніст-машина», здійснюється індикація даних про режими роботи поїзда і команд керування режимами. Для приведення поїзда в рух за командою машиніста з пульта 5 керування надсилається сигнал в обчислювальний блок 1. В обчислювальному блоці 1 одночасно працюють два центральні процесори: основний 2 і резервний 3. Керування швидкісним пасажирським електропоїздом здійснює центральний процесор 2, який працює як основний. На резервний центральний процесор 3 надходить та ж сама інформація, що й на основний 2. При цьому обидва центральні процесори 2, 3 здійснюють обробку та аналіз інформації, що надходить до них. У випадку несправності (або виходу з ладу) основного центрального процесора 2 його функції з керування системою здійснює резервний центральний процесор 3. 5 29142 Після надходження в обчислювальний блок 1 команди з пульта 5 керування машиніста основний центральний процесор 2 формує сигнал, який через багатофункціональну шину шину 4 надходить у блок 7 керування та контролю приводом, який у свою чергу здійснює включення однієї з позицій тяги. У процесі руху поїзда інформація про параметри його руху надходить в центральний процесор 2 обчислювального блока 1 з блока 7 керування та контролю приводом, на який надходять сигнали із засобів 9 вимірювання параметрів руху поїзда. Для здійснення режиму вибігу з пульта 5 машиніста вводиться команда на відключення тяги. Центральний процесор 2 формує сигнал, який через багатофункціональну поїзну шину 4 надходить на той же блок 7 керування та контролю приводом, який у свою чергу здійснює виключення тяги. Для включення режиму гальмування з пульта 5 машиніста надсилається команда в обчислювальний блок 1, який формує сигнал, що передається через багатофункціональну поїзну шину 4 на блок 8 керування гальмом, з якого у свою чергу сигнал режимом гальмування (службове або автостопне гальмування) надходить на блок 17 керування засобами пневматичного гальмування. Обчислювальний блок 1 передбачає роботу як у ручному режимі, так і в автоматичному режимі. У процесі руху поїзда вся інформація про параметри руху, тяги і гальмування, що надходить в обчислювальний блок 1, про команди, що надходять з пульта машиніста, а також інша необхідна інформація про роботу основних та допоміжних засобів відображається за допомогою пульта 5 машиніста. Інформація з пристрою 10 приймання сигналів автоматичної локомотивної сигналізації надходить у мікропроцесорний блок 19. На основі обробки та аналізу інформації з пристрою 10 приймання сигналів, а також інформації про параметри руху поїзда від датчиків 14 шляху і швидкості та тиску у гальмівній магістралі, інформації з блока 11 пам'яті з електронною картою, пристрою 12 суп утникової навігації та з цифрового радіоканалу 13 мікропроцесорний блок 19 формує величину допустимої швидкості руху. У процесі руху мікропроцесорний блок 19 проводить також безперервний контроль величини фактичної швидкості руху поїзда і при перевищенні фактичної швидкості величини допустимої надсилає керуючий сигнал на формувач 16 команд автостопного гальмування, який формує команду автостопного гальмування. Дана команда через блок 17 керування засобами пневматичного гальмування надходить безпосередньо на елементи керування гальмівною магістраллю. По каналу зв'язку, утвореному з'єднанням додаткових входів і ви ходів мікропроцесорного блока 19 через шлюз 18 та багатофункціональну поїзну шину 4 з виходами і входами обчислювального блока, у процесі функціонування 6 системи здійснюється обмін інформацією між основним центральним процесором 2 обчислювального блока 1 і мікропроцесорним блоком 19. Пристрій 12супутникової навігації отримує інформацію про місцезнаходження через резервовану супутникову систему визначення місцезнаходження Glonass і GPS. Ця інформація про позицію поїзда порівнюється із записаною у блоці 11 пам'я ті з електронною картою інформацією про ділянку. Тим самим може бути розпізнана нейтральна вставка або місце зміни роду живильної мережі, або ж може бути приведене в дію аварійне гальмо у випадку надто високої швидкості при входженні в певну ділянку маршруту. При аварійному гальмуванні формувач 16 команд автостопного гальмування формує команду автостопного гальмування. Дана команда через блок 17 керування засобами пневматичного гальмування надходить безпосередньо на елементи керування гальмівною магістраллю. Як тільки пристрій 12 суп утникової навігації отримує інформацію про те, що попереду знаходиться нейтральна вставка у мережі електропостачання змінного струму 25кВ, мікропроцесорний блок 19 формує команду на відкриття головного вимикача, яка надсилається через шлюз 18 на багатофункціональну поїзну шину 4, після чого головний вимикач відкривається без втручання машиніста електропоїзда. Після проходження нейтральної вставки головний вимикач знову закривається тим же самим механізмом без втручання машиніста. Блок 15 індикації та введення інформації видає машиністу електропоїзда інформацію про дію, що відбулася. Як тільки пристрій 12 супутникової навігації отримує інформацію від суп утникової системи про те, що має відбутися проходження місця зміни між системами напруги, мікропроцесорний блок 19 формує команду на відкриття головного вимикача і опускання струмоприймача, після чого ця дія проводиться автоматично без втручання машиніста електропоїзда. Включення при проходженні місця зміни систем машиніст повинен здійснити самостійно з метою безпеки. Як тільки мікропроцесорний блок 19 на основі інформації від суп утникової системи про місцезнаходження розпізнає, що поїзд на надто високій швидкості проходить місце зміни систем напруги, запускається формувач 16 команд автостопного гальмування, який формує команду автостопного гальмування. Дана команда через блок 17 керування засобами пневматичного гальмування надходить безпосередньо на елементи керування гальмівною магістраллю. Система керування дозволяє здійснити автостопне гальмування поїзда у випадку, якщо з якихось причин машиністом своєчасно не подана команда на здійснення режиму службового або автостопного гальмування чи через порушення функціонування центрального процесора та ненадходження від нього на блок 17 керування засобами пневматичного гальмування необхідної 7 команди, яка через блок 17 повинна надійти до елементів керування гальмівною магістраллю. 29142 8
ДивитисяДодаткова інформація
Назва патенту англійськоюControl system of high-speed passenger electric train
Автори англійськоюRozenberh Yefim Naumovich, Lipp Andreas, Lutz Hans-Urgen, Surm Mikael
Назва патенту російськоюСистема управления скоростным пассажирским электропоездом
Автори російськоюРозенберг Ефим Наумович, Липп Андреас, Лутц Ханс-Юрген, Зурм Михаэль
МПК / Мітки
МПК: B60L 15/20
Мітки: керування, електропоїздом, система, швидкісним, пасажирським
Код посилання
<a href="https://ua.patents.su/4-29142-sistema-keruvannya-shvidkisnim-pasazhirskim-elektropozdom.html" target="_blank" rel="follow" title="База патентів України">Система керування швидкісним пасажирським електропоїздом</a>
Процес керування пасажирським автоперевезенням
Номер патенту: 19127
Опубліковано: 15.12.2006
Автори: Латиш Володимир Юрійович, Хорольський Євген Миколайович, Мінець Євген Олександрович
МПК: B60N 5/00
Мітки: автоперевезенням, пасажирським, керування, процес
Формула / Реферат:
1 Процес здійснення пасажирських автоперевезень, який включає замовлення пасажиром параметрів бронювання, який відрізняється тим, що замовлення, переважно у вигляді SMS повідомлень або електронної пошти, попередньо надається до централізованої електронної системи обробки інформації, з наступним сповіщенням про можливі варіанти її здійснення та код бронювання у вигляді, наприклад, номера мобільного телефону або електронної пошти, надання...
Спосіб керування швидкісним режимом прокатування на обтискному стані
Номер патенту: 15350
Опубліковано: 15.09.2000
Автори: Азаров Сергій Іванович, Кукуй Давид Пенхусович, Коцегуб Павло Харитонович, Свєтлічний Олексій Васильович, Оробцев Юрій Вікторович, Ємченко Юрій Борисович
МПК: B21B 37/00
Мітки: прокатування, швидкісним, спосіб, обтискному, стані, керування, режимом
Формула / Реферат:
Способ управления скоростным режимом прокатки на обжимном стане, при котором задают скорость вращения валков, измеряют фактическое значение скорости вращения валков, сравнивают заданное значение скорости с фактическим, отличающийся тем, что заданное значение скорости вращения валков ограничивают на допустимом уровне, для чего рассчитывают оптимальную по времени максимальную скорость прокатки, предельную по отсутствию пробуксовки скорость...
Спосіб керування швидкісним режимом установки барабанних летучих ножиців з електричним зв’язком транспортуючого і різального пристроїв при мірному різанні смугового прокату
Номер патенту: 66902
Опубліковано: 15.06.2004
Автори: Гриценко Сергій Анатолійович, Білобров Юрій Миколайович, Єлецьких Володимир Іванович
МПК: B23D 25/00
Мітки: пристроїв, швидкісним, барабанних, електричним, режимом, різанні, спосіб, летучих, смугового, транспортуючого, мірному, ножиців, керування, зв'язком, установки, різального, прокату
Формула / Реферат:
Спосіб керування швидкісним режимом установки летучих барабанних ножиців з електричним зв'язком транспортуючого і різального пристроїв при мірному різанні смугового прокату, що полягає в тому, що смузі задають постійну швидкість переміщення від транспортуючого пристрою, барабанам ножиців задають перемінну кутову швидкість, середнє значення якої залежить від довжини листа, що відрізається, а барабанам у процесі різання задають швидкість з...
Система керування електровозом арп 8т
Номер патенту: 63081
Опубліковано: 15.01.2004
Автори: Вакульчик Володимир Григорович, Дебелий Володимир Леонідович
МПК: B60F 1/00
Мітки: арп, керування, електровозом, система
Формула / Реферат:
Система керування електровозом, в якій пуск та зупинка електровоза здійснюється шляхом застосування в транзисторному контролері КТВ-1 мікромодулів, які забезпечують плавний пуск, плавне гальмування електровоза, що гарантує обмеження розрядки акумуляторної батареї, захист від перевантажень тягових електродвигунів, а також включає стабілізоване живлення допоміжних ланцюгів за допомогою підключення до акумуляторної батареї, переключення світла...
Система керування космічним літальним апаратом
Номер патенту: 18400
Опубліковано: 15.11.2006
Автори: Гордін Олександр Григорович, Бандура Іван Миколайович, Малєва Людмила Сергіївна
МПК: B64G 1/24
Мітки: керування, система, апаратом, літальним, космічним
Формула / Реферат:
Система керування космічним літальним апаратом (КЛА), що містить триступеневий гіроскопічний виконавчий орган, датчики моментів на осях підвісу внутрішньої та зовнішньої рами, датчики кута та кутової швидкості КЛА, виходи яких, через попередні перетворювачі, з'єднані з входами блока керування, перший підсилювач потужності підключений до датчика моменту на осі підвісу зовнішньої рами, яка відрізняється тим, що в неї введені два маховики,...
Попередній патент: Склад швидкісного пасажирського електропоїзда
Наступний патент: Спосіб безпечного перевезення небезпечних вантажів у відкритому рухомому складі (варіанти)
Випадковий патент: Тест-система імуноферментна для напівкількісного аналізу та визначення авідності антитіл класу igg до вірусу простого герпесу 2 типу