Спосіб установлення зв’язку низькоорбітальним космічним апаратом з супутником-ретранслятором
Номер патенту: 31413
Опубліковано: 10.04.2008
Автори: Загорулько Олександр Миколайович, Ожінський Віктор Васильович, Богом'я Володимир Іванович, Засуха Сергій Олексійович
Формула / Реферат
Спосіб установлення зв'язку низькоорбітальним космічним апаратом (КА) з супутником-ретранслятором, який полягає в тому, що за поточними даними про рух низькоорбітального КА, які формуються автономною системою навігації, та просторовими (координатними) даними супутника-ретранслятора (СР), заздалегідь записаними в бортовий запам'ятовуючий пристрій, система керування антенними системами обраховує кути напряму на СР та здійснює наведення антенних систем КА на СР, який відрізняється тим, що використовуються поточні параметри руху КА, які формуються автономною системою навігації, та просторові (координатні) дані супутника-ретранслятора.
Текст
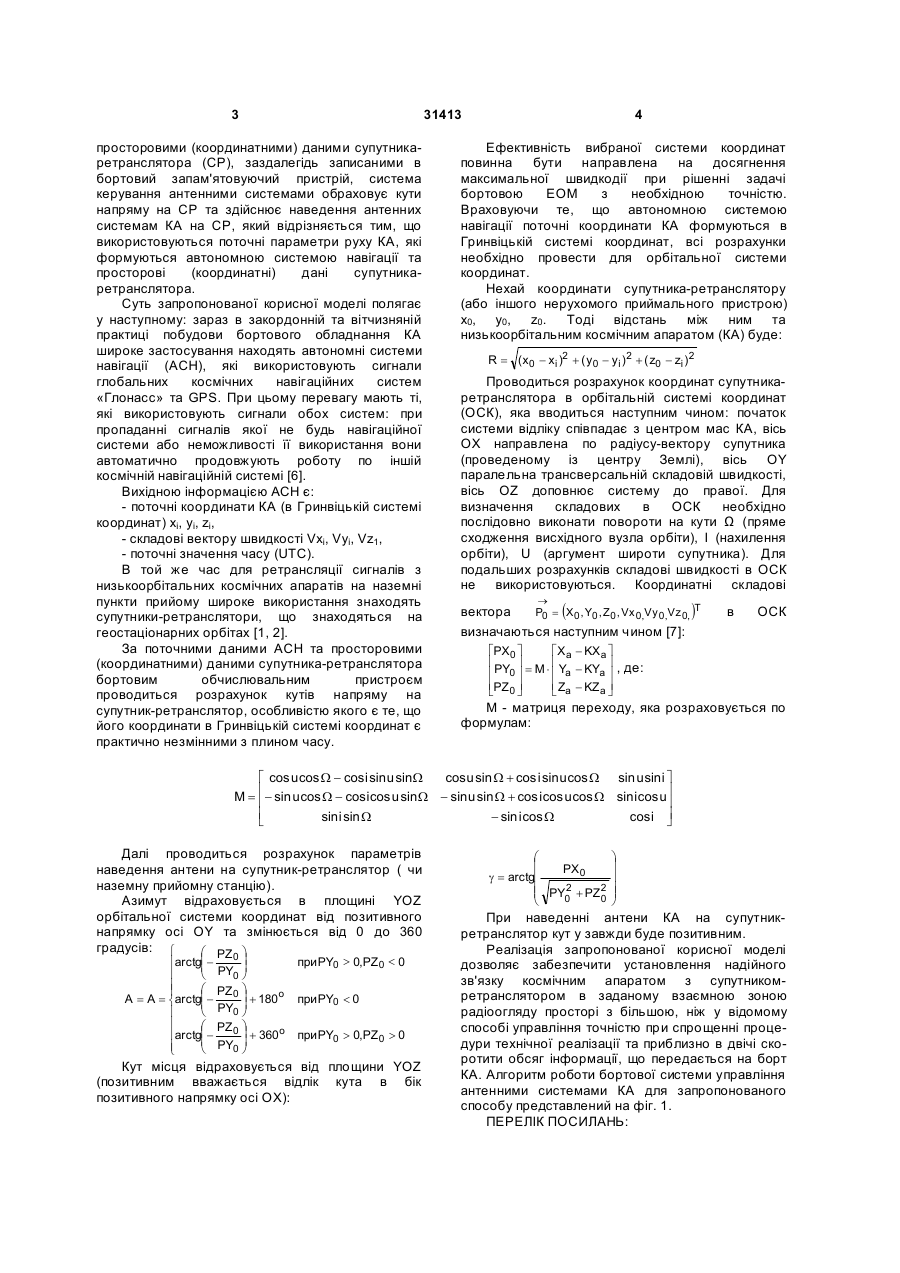
Спосіб установлення зв'язку низькоорбітальним космічним апаратом (КА) з супутником-ретранслятором, який полягає в тому, 3 31413 просторовими (координатними) даними супутникаретранслятора (СР), заздалегідь записаними в бортовий запам'ятовуючий пристрій, система керування антенними системами обраховує кути напряму на СР та здійснює наведення антенних системам КА на СР, який відрізняється тим, що використовуються поточні параметри руху КА, які формуються автономною системою навігації та просторові (координатні) дані супутникаретранслятора. Суть запропонованої корисної моделі полягає у наступному: зараз в закордонній та вітчизняній практиці побудови бортового обладнання КА широке застосування находять автономні системи навігації (АСН), які використовують сигнали глобальних космічних навігаційних систем «Глонасc» та GPS. При цьому перевагу мають ті, які використовують сигнали обох систем: при пропаданні сигналів якої не будь навігаційної системи або неможливості її використання вони автоматично продовжують роботу по іншій космічній навігаційній системі [6]. Вихідною інформацією АСН є: - поточні координати КА (в Гринвіцькій системі координат) хі, yі, zі, - складові вектору швидкості Vхі, Vyi, Vz1, - поточні значення часу (UTC). В той же час для ретрансляції сигналів з низькоорбітальних космічних апаратів на наземні пункти прийому широке використання знаходять супутники-ретранслятори, що знаходяться на геостаціонарних орбітах [1, 2]. За поточними даними АСН та просторовими (координатними) даними супутника-ретранслятора бортовим обчислювальним пристроєм проводиться розрахунок кутів напряму на супутник-ретранслятор, особливістю якого є те, що його координати в Гринвіцькій системі координат є практично незмінними з плином часу. 4 Ефективність вибраної системи координат повинна бути направлена на досягнення максимальної швидкодії при рішенні задачі бортовою ЕОМ з необхідною точністю. Враховуючи те, що автономною системою навігації поточні координати КА формуються в Гринвіцькій системі координат, всі розрахунки необхідно провести для орбітальної системи координат. Нехай координати супутника-ретранслятору (або іншого нерухомого приймального пристрою) х0, у0, z0. Тоді відстань між ним та низькоорбітальним космічним апаратом (КА) буде: R = (x 0 - x i )2 + ( у 0 - у і )2 + ( z0 - zi )2 Проводиться розрахунок координат супутникаретранслятора в орбітальній системі координат (ОСК), яка вводиться наступним чином: початок системи відліку співпадає з центром мас КА, вісь ОХ направлена по радіусу-вектору супутника (проведеному із центру Землі), вісь OY паралельна трансверсальній складовій швидкості, вісь OZ доповнює систему до правої. Для визначення складових в ОСК необхідно послідовно виконати повороти на кути Ω (пряме сходження висхідного вузла орбіти), І (нахилення орбіти), U (аргумент широти супутника). Для подальших розрахунків складові швидкості в ОСК не використовуються. Координатні складові ® вектора P0 (X0 , Y0 , Z0 , Vx 0,Vy 0,Vz 0, )T = визначаються наступним чином [7]: в ОСК é X a - KX a ù éPX 0 ù ú ê ú ê PY0 ú = M × ê Ya - KYa ú , де: ê ê Za - KZ a ú êPZ 0 ú û ë û ë М - матриця переходу, яка розраховується по формулам: é cos u cos W - cos i sin u sin W cos u sin W + cos i sin u cos W sin u sin i ù ú ê M = ê - sin u cos W - cos i cos u sin W - sin u sin W + cos i cos u cos W sin i cos uú ê sin i sin W - sin i cos W cos i ú û ë Далі проводиться розрахунок параметрів наведення антени на супутник-ретранслятор ( чи наземну прийомну станцію). Азимут відраховується в площині YOZ орбітальної системи координат від позитивного напрямку осі OY та змінюється від 0 до 360 градусів: ì æ PZ ö 0÷ ïarctgç ç PY ÷ ï 0ø è ï æ PZ 0 ö ï o ÷ A = A = íarctgç ç PY ÷ + 180 0ø è ï ï æ PZ 0 ö o ÷ ïarctgç ç PY ÷ + 360 ï 0ø è î при PY0 > 0,PZ 0 < 0 при PY0 0,PZ 0 > 0 Кут місця відраховується від площини YOZ (позитивним вважається відлік кута в бік позитивного напрямку осі ОХ): æ ç PX 0 g = arctgç ç PY 2 + PZ 2 ç 0 0 è ö ÷ ÷ ÷ ÷ ø При наведенні антени КА на супутникретранслятор кут у завжди буде позитивним. Реалізація запропонованої корисної моделі дозволяє забезпечити установлення надійного зв'язку космічним апаратом з супутникомретранслятором в заданому взаємною зоною радіоогляду просторі з більшою, ніж у відомому способі управління точністю при спрощенні процедури технічної реалізації та приблизно в двічі скоротити обсяг інформації, що передається на борт КА. Алгоритм роботи бортової системи управління антенними системами КА для запропонованого способу представлений на фіг. 1. ПЕРЕЛІК ПОСИЛАНЬ: 5 31413 1. Космические радиотехнические комплексы / Под общ. редакцией Г.В.Стогова - М.: МО СССР, 1986 -626с. 2. Застосування космічних систем для забезпечення дій збройних сил. Навчальний посібник /за ред. B.I.Ткаченка - Х.: ХВУ, 2001 192с. Глазов Б.И. Автоматизация управления 3. средствами и частями полигонных и космических комплексов - М.: МО СССР, 1988 - 326с. 4. Організація системи управління космічними засобами в умовах однопунктної технології / С.Т.Черепков, B.I.Богомья, О.М.Загорулько, С.Д.Ставицький: Навчальний посібник, - К.: НАОУ, 2005. -57с. Комп’ютерна верстка Н. Лисенко 6 5. Загорулько А.Н. Особенности программных способов управления космическими аппаратами при однопунктной технологии. // Моделювання та інформаційні технології: Збірник, наукових, праць.X.: НАНУ, Інститут проблем моделювання в енергетиці імені Г.Є. Пухова. - 2005, - Вип. 32. С.80-87. 6. Ефимов С.К., Нестерович А.Г., Яковченко А.И. Апаратура спутниковой навигации КА «Січ-1 М» и «Микроспутник. // Космічна наука і технологія. - 2001. - Т.7, №4. -С.114-116. 7. Охоцимский Д.Є., Сіхарулідзе Ю.Г. "Основи механіки космічного польоту" - М.: Наука, 1990. Підписне Тираж 26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod of communication establishment by low-orbiting spacecraft with relay satellite
Автори англійськоюZahorulko Oleksandr Mykolaiovych, Zasukha Serhii Oleksiiovych, Bohomia Volodymyr Ivanovych, Ozhinskyi Viktor Vasyliovych
Назва патенту російськоюСпособ установки связи низкоорбитальным космическим аппаратом со спутником-ретранслятором
Автори російськоюЗагорулько Александр Николаевич, Засуха Сергей Алексеевич, Богомья Владимир Иванович, Ожинский Виктор Васильевич
МПК / Мітки
МПК: B64G 1/24
Мітки: установлення, супутником-ретранслятором, спосіб, зв'язку, апаратом, низькоорбітальним, космічним
Код посилання
<a href="https://ua.patents.su/3-31413-sposib-ustanovlennya-zvyazku-nizkoorbitalnim-kosmichnim-aparatom-z-suputnikom-retranslyatorom.html" target="_blank" rel="follow" title="База патентів України">Спосіб установлення зв’язку низькоорбітальним космічним апаратом з супутником-ретранслятором</a>
Спосіб установлення зв`язку космічним апаратом з наземною станцією керування
Номер патенту: 25020
Опубліковано: 25.07.2007
Автори: Моргун Олександр Андрійович, Загорулько Олександр Миколайович, Богом'я Володимир Іванович, Козелкова Катерина Сергіївна
МПК: B64G 1/24
Мітки: установлення, апаратом, керування, станцією, спосіб, зв'язку, наземною, космічним
Формула / Реферат:
Спосіб установлення зв'язку космічним апаратом (КА) з наземною станцією керування, який полягає в тому, що моменти вмикання (вимикання) сеансної апаратури відбуваються при досягненні трасою польоту (підсупутниковою точкою орбіти КА) координат початку (кінця) зони радіоогляду наземної станції керування, заздалегідь записаних в бортовий запам'ятовуючий пристрій, який відрізняється тим, що використовуються поточні дані про рух КА в гринвіцькій...
Система керування космічним літальним апаратом
Номер патенту: 11982
Опубліковано: 16.01.2006
Автори: Ворончук Сергій Петрович, Гавриленко Олег Іванович
МПК: B64G 1/24
Мітки: система, керування, космічним, апаратом, літальним
Формула / Реферат:
Система керування космічним літальним апаратом, що складається з датчика кута, датчика кутових швидкостей, першого та другого масштабного блоків, послідовно з'єднаних підсилювача потужності, електродвигуна, ротора електродвигуна, тахометра, яка відрізняється тим, що додатково введено мікропроцесорний пристрій, перший і другий вхід якого з'єднані з виходами першого і другого масштабних блоків відповідно, вихід мікропроцесорного блока з'єднаний...
Пристрій керування космічним апаратом

Номер патенту: 20080
Опубліковано: 15.01.2007
Автори: Бандура Іван Миколайович, Царук Катерина Олексіївна, Фірсов Сергій Миколайович, Циганков Євген Васильович, Дибська Ирина Юріївна
МПК: B64G 1/28
Мітки: космічним, пристрій, апаратом, керування
Формула / Реферат:
Пристрій керування космічним апаратом, що містить перший та другий цифро-аналогові перетворювачі, перший та другий електричні приводи, перший та другий датчики обертів, перший та другий підсилювачі потужності, аналого-цифровий перетворювач, який відрізняється тим, що до нього введені цифровий керуючий обчислювач, перший і другий двигуни-маховики, вихід аналого-цифрового перетворювача разом із вхідним сигналом системи підключений до входів...
Система керування космічним літальним апаратом
Номер патенту: 18400
Опубліковано: 15.11.2006
Автори: Малєва Людмила Сергіївна, Гордін Олександр Григорович, Бандура Іван Миколайович
МПК: B64G 1/24
Мітки: літальним, керування, апаратом, космічним, система
Формула / Реферат:
Система керування космічним літальним апаратом (КЛА), що містить триступеневий гіроскопічний виконавчий орган, датчики моментів на осях підвісу внутрішньої та зовнішньої рами, датчики кута та кутової швидкості КЛА, виходи яких, через попередні перетворювачі, з'єднані з входами блока керування, перший підсилювач потужності підключений до датчика моменту на осі підвісу зовнішньої рами, яка відрізняється тим, що в неї введені два маховики,...
Система керування космічним літальним апаратом

Номер патенту: 67029
Опубліковано: 15.06.2004
Автори: Погудін Андрій Володимирович, Батаєв Віктор Олександрович, Овсяннікова Ірина Валеріївна, Бандура Іван Миколайович
МПК: B64G 1/24
Мітки: апаратом, керування, літальним, система, космічним
Формула / Реферат:
Система керування космічним літальним апаратом, що містить датчик кута та датчик кутових швидкостей, які з'єднані через перший і другий масштабні блоки з формувачем закону керування, і підсилювач потужності, яка відрізняється тим, що в неї введені послідовно включені інтегратор, порівнюючий пристрій, з'єднаний через підсилювач потужності з ротором електродвигуна, на роторі встановлений тахометр, який з'єднаний з другим входом порівнюючого...
Попередній патент: Різьбове з`єднання
Наступний патент: Електроліт для електрохімічного осадження багатофункціональних покрить сплавом залізо-нікель
Випадковий патент: Спосіб закріплення ґрунту