Спосіб керування космічними апаратами.
Номер патенту: 32203
Опубліковано: 12.05.2008
Автори: Загорулько Олександр Миколайович, Богом'я Володимир Іванович, Ожінський Віктор Васильович

Формула / Реферат
Спосіб керування космічними апаратами (КА), який полягає в тому, що в процесі експлуатації КА процесор з використанням математичного апарату нечіткої логіки накопичує досвід про типові відмови, відмови, викликані випрацюванням ресурсу апаратури, "плаваючі" несправності, коригує алгоритми функціонування БЦОМ, перешкоджаючи переходу в аварійні режими та режими обмеженого функціонування, забезпечуючи зберігання корисної інформації, який відрізняється тим, що керування КА здійснюється автономно, а не за командами, розрахованими на Землі, без переведення КА в аварійні режими при відмовах елементів бортової апаратури.
Текст
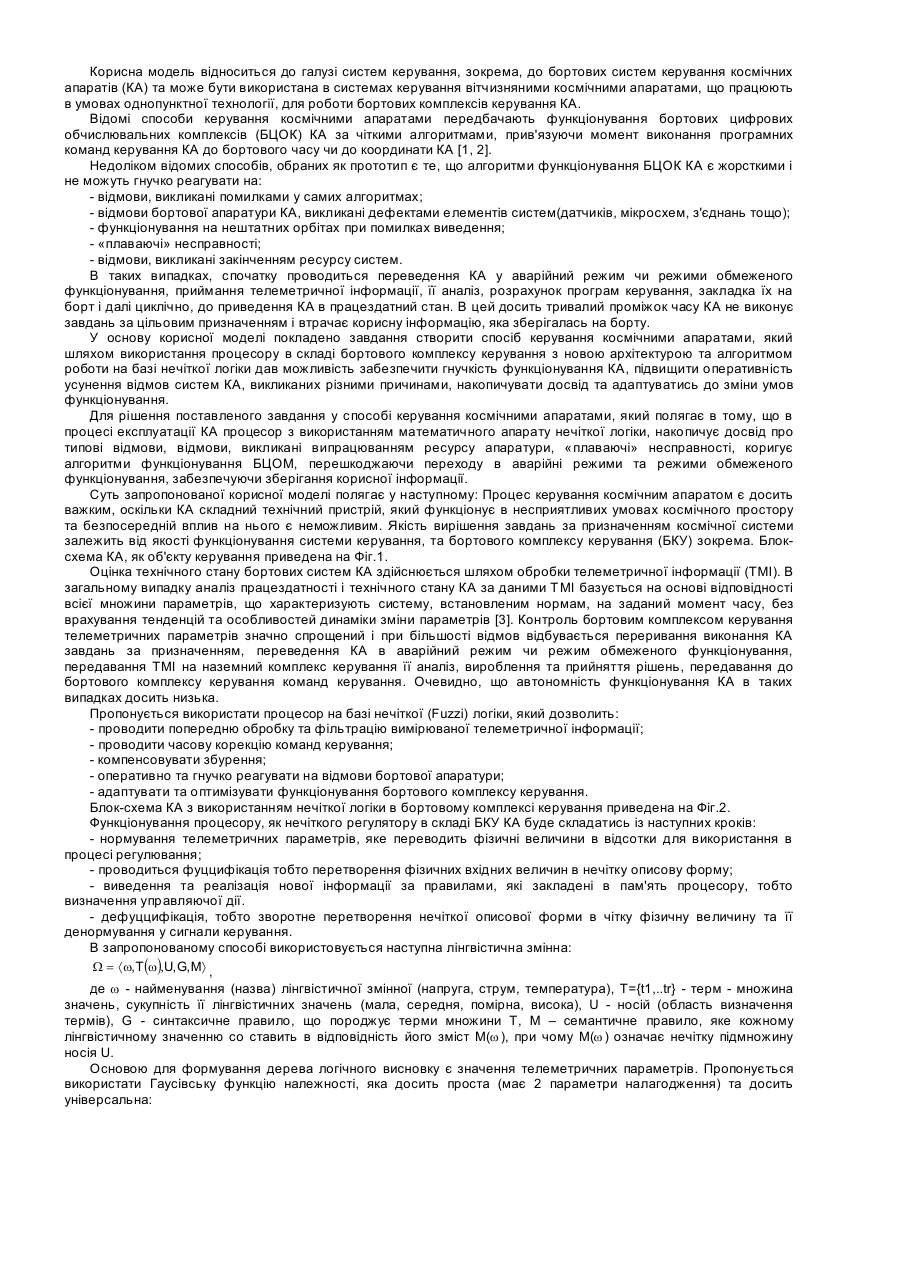
Корисна модель відноситься до галузі систем керування, зокрема, до бортових систем керування космічних апаратів (КА) та може бути використана в системах керування вітчизняними космічними апаратами, що працюють в умовах однопунктної технології, для роботи бортових комплексів керування КА. Відомі способи керування космічними апаратами передбачають функціонування бортових цифрових обчислювальних комплексів (БЦОК) КА за чіткими алгоритмами, прив'язуючи момент виконання програмних команд керування КА до бортового часу чи до координати КА [1, 2]. Недоліком відомих способів, обраних як прототип є те, що алгоритми функціонування БЦОК КА є жорсткими і не можуть гнучко реагувати на: - відмови, викликані помилками у самих алгоритмах; - відмови бортової апаратури КА, викликані дефектами елементів систем(датчиків, мікросхем, з'єднань тощо); - функціонування на нештатних орбітах при помилках виведення; - «плаваючі» несправності; - відмови, викликані закінченням ресурсу систем. В таких випадках, спочатку проводиться переведення КА у аварійний режим чи режими обмеженого функціонування, приймання телеметричної інформації, її аналіз, розрахунок програм керування, закладка їх на борт і далі циклічно, до приведення КА в працездатний стан. В цей досить тривалий проміжок часу КА не виконує завдань за цільовим призначенням і втрачає корисну інформацію, яка зберігалась на борту. У основу корисної моделі покладено завдання створити спосіб керування космічними апаратами, який шляхом використання процесору в складі бортового комплексу керування з новою архітектурою та алгоритмом роботи на базі нечіткої логіки дав можливість забезпечити гнучкість функціонування КА, підвищити оперативність усунення відмов систем КА, викликаних різними причинами, накопичувати досвід та адаптуватись до зміни умов функціонування. Для рішення поставленого завдання у способі керування космічними апаратами, який полягає в тому, що в процесі експлуатації КА процесор з використанням математичного апарату нечіткої логіки, накопичує досвід про типові відмови, відмови, викликані випрацюванням ресурсу апаратури, «плаваючі» несправності, коригує алгоритми функціонування БЦОМ, перешкоджаючи переходу в аварійні режими та режими обмеженого функціонування, забезпечуючи зберігання корисної інформації. Суть запропонованої корисної моделі полягає у наступному: Процес керування космічним апаратом є досить важким, оскільки КА складний технічний пристрій, який функціонує в несприятливих умовах космічного простору та безпосередній вплив на нього є неможливим. Якість вирішення завдань за призначенням космічної системи залежить від якості функціонування системи керування, та бортового комплексу керування (БКУ) зокрема. Блоксхема КА, як об'єкту керування приведена на Фіг.1. Оцінка технічного стану бортових систем КА здійснюється шляхом обробки телеметричної інформації (ТМІ). В загальному випадку аналіз працездатності і технічного стану КА за даними ТМІ базується на основі відповідності всієї множини параметрів, що характеризують систему, встановленим нормам, на заданий момент часу, без врахування тенденцій та особливостей динаміки зміни параметрів [3]. Контроль бортовим комплексом керування телеметричних параметрів значно спрощений і при більшості відмов відбувається переривання виконання КА завдань за призначенням, переведення КА в аварійний режим чи режим обмеженого функціонування, передавання ТМІ на наземний комплекс керування її аналіз, вироблення та прийняття рішень, передавання до бортового комплексу керування команд керування. Очевидно, що автономність функціонування КА в таких випадках досить низька. Пропонується використати процесор на базі нeчіткої (Fuzzi) логіки, який дозволить: - проводити попередню обробку та фільтрацію вимірюваної телеметричної інформації; - проводити часову корекцію команд керування; - компенсовувати збурення; - оперативно та гнучко реагувати на відмови бортової апаратури; - адаптувати та оптимізувати функціонування бортового комплексу керування. Блок-схема КА з використанням нечіткої логіки в бортовому комплексі керування приведена на Фіг.2. Функціонування процесору, як нечіткого регулятору в складі БКУ КА буде складатись із наступних кроків: - нормування телеметричних параметрів, яке переводить фізичні величини в відсотки для використання в процесі регулювання; - проводиться фуццифікація тобто перетворення фізичних вхідних величин в нечітку описову форму; - виведення та реалізація нової інформації за правилами, які закладені в пам'ять процесору, тобто визначення управляючої дії. - дефуццифікація, тобто зворотне перетворення нечіткої описової форми в чітку фізичну величину та її денормування у сигнали керування. В запропонованому способі використовується наступна лінгвістична змінна: W = á w, T(w),U, G, Mñ , де w - найменування (назва) лінгвістичної змінної (напруга, струм, температура), T={t1,..tr} - терм - множина значень, сукупність її лінгвістичних значень (мала, середня, помірна, висока), U - носій (область визначення термів), G - синтаксичне правило, що породжує терми множини Т, М – семантичне правило, яке кожному лінгвістичному значенню со ставить в відповідність його зміст М(w ), при чому М(w ) означає нечітку підмножину носія U. Основою для формування дерева логічного висновку є значення телеметричних параметрів. Пропонується використати Гаусівську функцію належності, яка досить проста (має 2 параметри налагодження) та досить універсальна: é æ x - b ö2 ù f (x ) = exp ê - ç ÷ ú ê ç c ÷ ú ø û è ë де х - значення вхідного параметру, що підлягає фазифікації, b - координата максимуму функції, с - коефіцієнт концентрації - розтягу функції. Використання запропонованого способу відповідає новітнім тенденціям в розробці КА, які напрямлені на розробку уніфікованих космічних платформ, що дає можливість розробити нечіткі регулятори уніфіковані до типів платформ. Перелік посилань: 1. Загорулько А.Н. Особенности программных способов управления космическими аппаратами при однопунктной технологии. // Моделювання та інформаційні технології: Збірник, наукових, праць. X.: НАНУ, Інститут проблем моделювання в енергетиці імені Г.Є. Пухова. - 2005. - Вип. 32. -С.80-87 2. Патент №19490 Україна, МПК B64G1/24. Кординатно-часовий спосіб керування космічними апаратами: Пат. №19490 Україна, МПК B64G1/24. / О.М. Загорулько, В.І. Богомья, О.М. Моргун (Україна). - №u200607244; Заявл. 30.06.06; Опубл.15.12.06; Бюл №12. -8с. 3. Організація системи керування космічними засобами в умовах однопунктної технології / СТ. Черепков, О.А. Моргун, О.М. Загорулько, С.Д. Ставицький: Навчальний посібник. - К.: НАОУ, 2005. - 57с.
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for control of spacecrafts
Автори англійськоюOzhinskyi Viktor Vasyliovych, Zahorulko Oleksandr Mykolaiovych, Bohomia Volodymyr Ivanovych
Назва патенту російськоюСпособ управления космическими аппаратами
Автори російськоюОжинский Виктор Васильевич, Загорулько Александр Николаевич, Богомья Владимир Иванович
МПК / Мітки
МПК: G05B 17/00
Мітки: керування, космічними, апаратами, спосіб
Код посилання
<a href="https://ua.patents.su/3-32203-sposib-keruvannya-kosmichnimi-aparatami.html" target="_blank" rel="follow" title="База патентів України">Спосіб керування космічними апаратами.</a>
Координатно-часовий спосіб керування космічними апаратами
Номер патенту: 19490
Опубліковано: 15.12.2006
Автори: Богом'я Володимир Іванович, Моргун Олександр Андрійович, Загорулько Олександр Миколайович
МПК: B64G 1/24
Мітки: координатно-часовий, космічними, спосіб, керування, апаратами
Формула / Реферат:
Координатно-часовий спосіб керування космічними апаратами, який полягає в тому, що програма роботи бортових систем КА (космічного апарата), яка записується в бортовий запам'ятовуючий пристрій для подальшого відпрацювання, являє собою параметричну (змістовну) частину та часову і просторову (координатну) складові, які забезпечують виконання операцій керування як в заданий час, так і в заданій точці простору, яка відрізняється тим, що поряд з...
Спосіб контролю дводротяних ланцюгів дистанційного керування електричними апаратами
Номер патенту: 76912
Опубліковано: 15.09.2006
Автор: Прудніков Володимир Сергійович
МПК: H02J 13/00
Мітки: керування, спосіб, апаратами, дводротяних, дистанційного, ланцюгів, електричними, контролю
Формула / Реферат:
1. Спосіб контролю дводротяних ланцюгів дистанційного керування електричними апаратами, що полягає в контролі від джерела змінного сигналу напруги на лінії зв'язку керованого апарата з кнопковим постом керування, що містить кінцевий діод, шляхом формування різниці сигналів, пропорційних амплітудним значенням півхвиль змінної напруги на лінії зв'язку, при досягненні порогового значення якої одержують вихідний сигнал, що впливає на виконавчий...
Пристрій дистанційного керування електричними апаратами
Номер патенту: 12113
Опубліковано: 16.01.2006
Автори: Римар Мирон Ізраільович, Бєжок Віктор Романович, Дзюбан Віталій Серафимович, Корсун Володимир Андрійович
МПК: H02J 13/00
Мітки: керування, пристрій, електричними, апаратами, дистанційного
Формула / Реферат:
1. Пристрій дистанційного керування електричним апаратом, що містить послідовно з'єднані джерело живлення змінного струму, струмообмежувальний резистор, пост керування з кнопками "Пуск" і "Стоп" і кінцевим діодом, лінію зв'язку пристрою з постом керування, RC-ланцюг, приєднаний до початку згаданої лінії зв'язку, підсилювач, виконавче реле, котушка електромагніта якого включена в ланцюг навантаження підсилювача, вхід якого...
Система керування параметрами організації
Номер патенту: 9181
Опубліковано: 15.09.2005
Автори: Логвиненко Микола Федорович, Чурюмов Геннадій Іванович, Пєвнєв Володимир Яковлевич, Серков Олександр Анатолійович
МПК: G05B 13/00
Мітки: організації, система, керування, параметрами
Формула / Реферат:
Система керування параметрами організації, що містить об'єкт керування, вимірник параметрів об'єкта керування, блок прийняття рішення, блок керування, яка відрізняється тим, що додатково введено редактор правил системи нечіткого виводу, редактор функцій належності, причому блок прийняття рішення реалізовано на основі апарата нечіткої логіки.
Панель керування гусеничної машини
Номер патенту: 23761
Опубліковано: 11.06.2007
Автори: Бондар Олександр Іванович, Кузнєцов Геннадій Олександрович, Павленко Сергій Анатолійович, Волосніков Сергій Олександрович, Бобровський Олександр Іванович, Фурсов Олександр Анатолійович
МПК: B60K 37/00
Мітки: керування, гусеничної, панель, машини
Формула / Реферат:
1. Панель керування гусеничної машини, призначена для передачі інформації водію про стан основних агрегатів і систем за допомогою контрольних приладів (8), сигналізаторів (4), а також для керування різними системами гусеничної машини за допомогою органів керування (5) і автоматів захисту (6), розташованих на пультах керування (2) та індикації (3), яка відрізняється тим, що органи керування (5) розміщуються на пультах керування (2)...
Попередній патент: 1-n-метилбензил-8-n-піперазинотеобромін, який виявляє антиоксидантну та протизапальну дію
Наступний патент: Пристрій для різання харчових продуктів
Випадковий патент: Пускорегулюючий апарат