Пристрій для контролю місця розташування підйомної посудини
Номер патенту: 82162
Опубліковано: 11.03.2008
Автори: Демченко Дмитро Миколайович, Мялковський Валентин Йосипович, Чехлатий Андрій Миколайович, Демченко Микола Петрович, Чехлатий Микола Олександрович
Формула / Реферат
Пристрій для контролю місця розташування підйомної посудини, що містить блок прийому інформації і блок передачі інформації, до складу якого входять два датчики зближення, розташовані на вертикальній стінці підйомної посудини, який відрізняється тим, що в блок прийому інформації введені два регістри, комутатор, виходи якого підключені до відповідних входів керування першого і другого цифрових індикаторів, інформаційні входи першого і другого цифрових індикаторів з'єднані з відповідними виходами першого і другого регістрів, мікроконтролер, шина даних і вихід сигналу «Запис даних» якого з'єднані з відповідними входами першого і другого регістрів, дешифратор, виходи якого з'єднані з відповідними входами керування комутатора, а інформаційні входи - з відповідними виходами шини ввід/вивід мікроконтролера, діод, анод якого з'єднаний із плюсом джерела електроживлення, а катод - із входами електроживлення мікроконтролера і першого ключа, вхід керування останнього через стабілітрон підключений до плюса джерела електроживлення, конденсатор, один вивід якого з'єднаний із входом електроживлення мікроконтролера, а інший - з мінусом джерела електроживлення, приймач радіосигналів, перший і другий виходи якого з'єднані з відповідними входами мікроконтролера, дві кнопки, перші кінці кожної кнопки підключені через відповідний резистор до плюса джерела електроживлення і відповідного входу приймача радіосигналів, а другі - до мінуса джерела електроживлення, крім того перші кінці кнопок з'єднані відповідно з першим і другим входами мікроконтролера, третій вхід якого з'єднаний з виходом першого ключа, при цьому у блок передачі інформації додатково введені передавач радіосигналів, другий ключ та іскробезпечне джерело електроживлення, вихід якого з'єднаний з відповідними входами першого та другого датчиків зближення і другим ключем, елемент АБО, вихід якого підключений до керуючого входу другого ключа, а перший і другий входи з'єднані з відповідними входами передавача радіосигналів і виходами датчиків зближення, причому датчики зближення встановлені один відносно другого на відстані ![]() , яка визначається за формулою:
, яка визначається за формулою:
![]() ,
,
де ![]() - товщина розстрілу,
- товщина розстрілу, ![]() - максимальна швидкість руху підйомної посудини,
- максимальна швидкість руху підйомної посудини, ![]() - час передачі інформації.
- час передачі інформації.
Текст
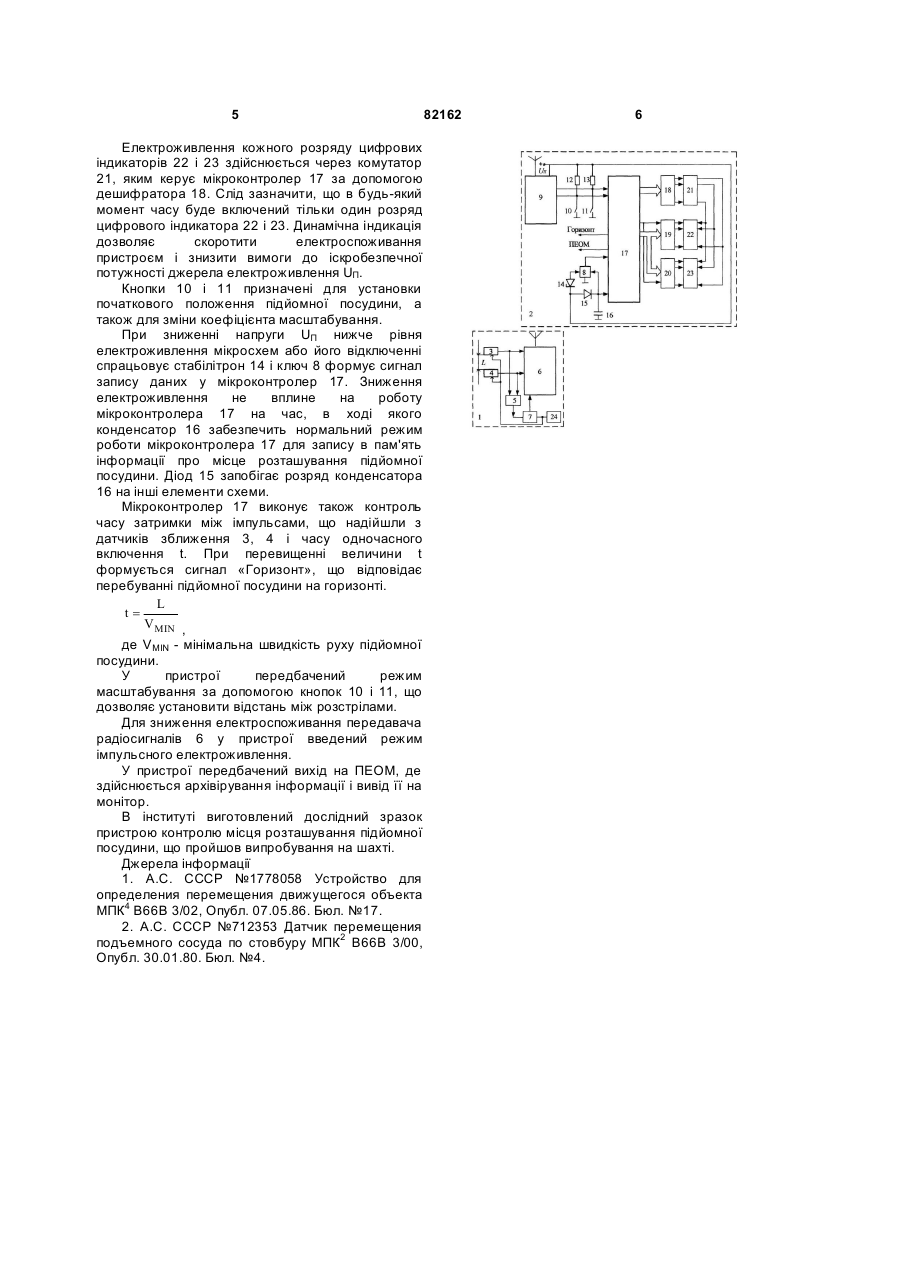
Пристрій для контролю місця розташування підйомної посудини, що містить блок прийому інформації і блок передачі інформації, до складу якого входять два датчики зближення, розташовані на вертикальній стінці підйомної посудини, який відрізняється тим, що в блок прийому інформації введені два регістри, комутатор, виходи якого підключені до відповідних входів керування першого і другого цифрових індикаторів, інформаційні входи першого і другого цифрових індикаторів з'єднані з відповідними виходами першого і другого регістрів, мікроконтролер, шина даних і вихід сигналу «Запис даних» якого з'єднані з відповідними входами першого і другого регістрів, дешифратор, виходи якого з'єднані з відповідними входами керування комутатора, а інформаційні входи - з C2 2 (19) 1 3 що реєструє, іншим кінцем. До недоліку пристрою варто віднести необхідність прокладки по стовбуру спеціального кабелю, що знижує надійність і вимагає додаткових витрат на прокладку та експлуатацію кабелю. Найбільш близьким за технічною суттю до винаходу є датчик переміщення підйомної посудини по стовбуру шахти [2], що містить два датчики зближення, розташовані на вертикальній стінці підйомної посудини. До недоліку датчика варто віднести необхідність застосування каната з магнітними мітками, що знижує надійність пристрою і вимагає додаткових витрат для нанесення магнітних міток на канат. Задачею винаходу є розширення функціональних можливостей пристрою шляхом контролю напрямку руху, швидкості і місця розташування підйомної посудини. Це дозволяє розширити область застосування пристрою, а також знизити витрати на монтаж і експлуатацію. Поставлена задача вирішується тим, що в пристрій контролю місця розташування підйомної посудини, який містить блок передачі інформації, до складу якого входять два датчики зближення, розташовані на вертикальній стінці підйомної посудини і блок прийому інформації, згідно з винаходом, в блок прийому інформації введені два регістри, комутатор, виходи якого підключені до відповідних входів керування першого і другого цифрового індикатора, інформаційні входи першого і другого цифрового індикатора з'єднані з відповідними виходами першого і другого регістра, мікроконтролер, шина даних і сигнал «Запис даних» якого з'єднані з відповідними входом першого і другого регістра, дешифратор, виходи якого з'єднані з відповідними входами керування комутатора, а інформаційні входи - з відповідними виходами шини ввід/вивід мікроконтролера, діод, анод якого з'єднаний із плюсом джерела електроживлення, а катод - із входами електроживлення мікроконтролера і першого ключа, вхід керування останнього через стабілітрон підключений до плюса джерела електроживлення, конденсатор, один кінець якого з'єднаний із входом електроживлення мікроконтролера, а інший з мінусом джерела електроживлення, приймач радіосигналів, перший і другий виходи якого з'єднані з відповідними входами мікроконтролера, дві кнопки, перші кінці кожної кнопки підключені через відповідний резистор до плюса джерела електроживлення і відповідним входом приймача радіосигналів, а другі до мінуса джерела електроживлення, причому перші кінці кнопок з'єднані відповідно з першим і другим входами мікроконтролера, третій вхід останнього з'єднаний з виходом першого ключа, у блок передачі інформації введені передавач радіосигналів, другий ключ, іскробезпечне джерело електроживлення, вихід якого з’єднаний з відповідними входами першого та другого датчика зближення і другим ключем, елемент АБО, вихід якого підключений до керуючого входу другого ключа, а перший і другий входи з'єднані з відповідними входами передавача 82162 4 радіосигналів і виходами датчиків зближення, причому останні встановлені один відносно другого на відстані L = d + VМАХ t , де: d - товщина розстрілу; VМАХ - максимальна швидкість руху підйомної посудини; t - час передачі інформації. Введення імпульсного електроживлення передавача радіосигналів знижує вимоги до забезпечення іскробезпечної потужності джерела електроживлення. Установка датчиків зближення одного відносно другого на відстані L дозволить контролювати напрямок переміщення та перебування підйомної посудини на горизонті. На рис. 1 зображена блок-схема пристрою контролю місця розташування підйомної посудини. Пристрій контролю місця розташування підйомної посудини містить блок 1 передачі інформації, блок 2 прийому інформації, датчики зближення 3 і 4, елемент АБО 5, передавач радіосигналів 6, ключі 7 і 8, приймач радіосигналів 9, кнопки 10 і 11, резистори 12 і 13, стабілітрон 14, діод 15, конденсатор 16, мікроконтролер 17, дешифратор 18, регістри 19 і 20, комутатор 21, цифрові індикатори 22 і 23, іскробезпечне джерело електроживлення 24. Пристрій працює таким чином. На рухомій посудини встановлюється передавач 6 радіосигналів, елемент АБО 5, ключ 7, іскробезпечне джерело електроживлення 24 та датчики зближення 3 і 4. Причому останні встановлюються на вертикальній стінці рухомій посудини (кліть або скіп) на відстані L відносно один одного у вертикальній площині. Величина L визначається по формулі: L = d + VМАХ t де d - товщина розстрілу, Vмах - максимальна швидкість руху підйомної посудини, t - час передачі інформації. При русі підйомної посудини по стовбуру, при наявності розстрілу, включаються датчики зближення 3 і 4. Сигнали з виходів датчиків зближення 3 і 4 надходять на відповідні цифрові входи передавача 6 радіосигналів і на елемент АБО 5. З виходу елемента АБО 5 сигнал надходить на ключ 7, що підключає іскробезпечне джерело електроживлення 24 до передавача радіосигналів 6. Останній формує високочастотну посилку. Приймач 9 радіосигналів забезпечує прийом високочастотної посилки і перетворює її у відеоімпульси, що надходять на відповідні входи мікроконтролера 17. Останній визначає напрямок переміщення підйомної посудини, обчислює його місце розташування і швидкість руху, шляхом підрахунку кількості імпульсів та обліку часу руху. Інформація про місце розташування підйомної посудини з виходу мікроконтролера 17 надходить через регістр 19 на цифровий індикатор 22, а інформація про швидкість руху надходить через регістр 20 на цифровий індикатор 23. 5 Електроживлення кожного розряду цифрових індикаторів 22 і 23 здійснюється через комутатор 21, яким керує мікроконтролер 17 за допомогою дешифратора 18. Слід зазначити, що в будь-який момент часу буде включений тільки один розряд цифрового індикатора 22 і 23. Динамічна індикація дозволяє скоротити електроспоживання пристроєм і знизити вимоги до іскробезпечної потужності джерела електроживлення UП. Кнопки 10 і 11 призначені для установки початкового положення підйомної посудини, а також для зміни коефіцієнта масштабування. При зниженні напруги UП нижче рівня електроживлення мікросхем або його відключенні спрацьовує стабілітрон 14 і ключ 8 формує сигнал запису даних у мікроконтролер 17. Зниження електроживлення не вплине на роботу мікроконтролера 17 на час, в ході якого конденсатор 16 забезпечить нормальний режим роботи мікроконтролера 17 для запису в пам'ять інформації про місце розташування підйомної посудини. Діод 15 запобігає розряд конденсатора 16 на інші елементи схеми. Мікроконтролер 17 виконує також контроль часу затримки між імпульсами, що надійшли з датчиків зближення 3, 4 і часу одночасного включення t. При перевищенні величини t формується сигнал «Горизонт», що відповідає перебуванні підйомної посудини на горизонті. L t= VМІN , де VMIN - мінімальна швидкість руху підйомної посудини. У пристрої передбачений режим масштабування за допомогою кнопок 10 і 11, що дозволяє установити відстань між розстрілами. Для зниження електроспоживання передавача радіосигналів 6 у пристрої введений режим імпульсного електроживлення. У пристрої передбачений вихід на ПЕОМ, де здійснюється архівірування інформації і вивід її на монітор. В інституті виготовлений дослідний зразок пристрою контролю місця розташування підйомної посудини, що пройшов випробування на шахті. Джерела інформації 1. А.С. СССР №1778058 Устройство для определения перемещения движущегося объекта МПК4 В66В 3/02, Опубл. 07.05.86. Бюл. №17. 2. А.С. СССР №712353 Датчик перемещения подъемного сосуда по стовбуру МПК2 В66В 3/00, Опубл. 30.01.80. Бюл. №4. 82162 6
ДивитисяДодаткова інформація
Назва патенту англійськоюDevice for control of location of lifting vessel
Автори англійськоюChekhlatyi Mykola Oleksandrovych, Mialkovskyi Valentyn Yosypovych, Demchenko Mykola Petrovych, Demchenko Mykola Petrovych, Chekhlatyi Andrii Mykolaiovych
Назва патенту російськоюУстройство для контроля местоположения подъемной емкости
Автори російськоюЧехлатый Николай Александрович, Мялковский Валентин Иосифович, Демченко Дмитрий Николаевич, Демченко Николай Петрович, Чехлатый Андрей Николаевич
МПК / Мітки
МПК: B66B 3/00, B66B 1/00, B66B 5/00
Мітки: контролю, посудини, пристрій, підйомної, місця, розташування
Код посилання
<a href="https://ua.patents.su/3-82162-pristrijj-dlya-kontrolyu-miscya-roztashuvannya-pidjjomno-posudini.html" target="_blank" rel="follow" title="База патентів України">Пристрій для контролю місця розташування підйомної посудини</a>
Пристрій для керування переміщенням підйомної посудини в шахтному стволі
Номер патенту: 81833
Опубліковано: 11.02.2008
Автори: Дворников Михайло Володимирович, Чехлатий Андрій Миколайович, Пристром Володимир Адольфович, Дворников Володимир Іванович, Грядущий Борис Абрамович, Бежок Віктор Романович
МПК: B03B 13/00, G01G 13/00
Мітки: стволі, шахтному, переміщенням, пристрій, керування, посудини, підйомної
Формула / Реферат:
Пристрій для керування переміщенням підйомної посудини в шахтному стволі, що містить блок контролю та керування навантажувального пункту, до складу якого входять привід обвалення гірської маси в дозатор, привід живильника та конвеєра, привід клапана герметизації, привід секторного затвора, привід гасника швидкості гірської маси, датчик наявності гірської маси в бункері, два датчики приходу транспортної посудини під завантаження, датчик...
Пристрій цифрової індикації розташування сосуду шахтної підйомної машини
Номер патенту: 6068
Опубліковано: 29.12.1994
Автори: Матвієнко Микола Павлович, Марищенко Олександр Іванович
МПК: B66B 3/02
Мітки: індикації, пристрій, цифрової, сосуду, машини, шахтної, підйомної, розташування
Формула / Реферат:
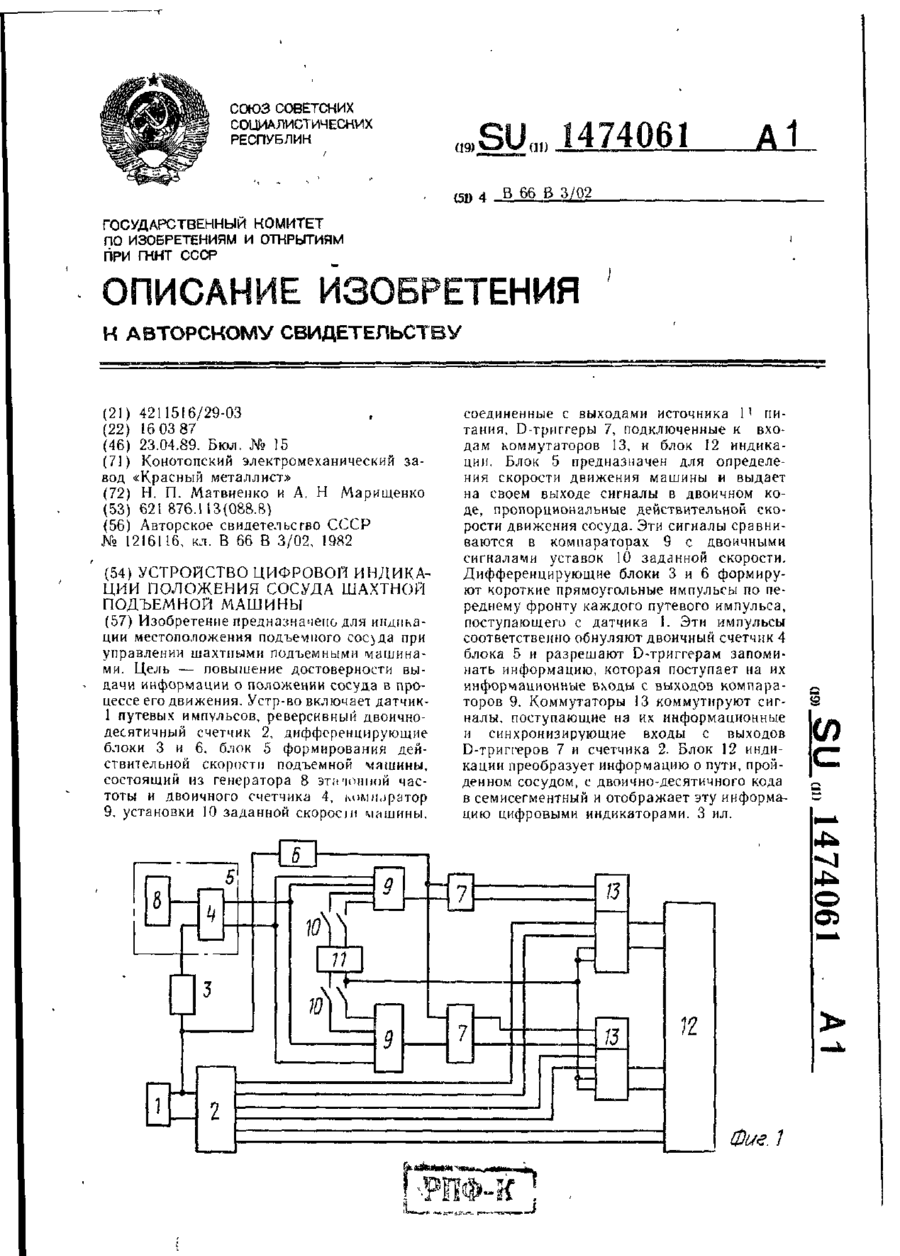
Устройство цифровой индикации положения сосуда шахтной подъемной машины, содержащее датчик путевых импульсов, первый и второй выходы которого соединены соответственно со счетным и управляющим входами реверсивного двоично-десятичного счетчика, выходы старших декад которого подключены к старшим декадам блока индикации, два компаратора, первые входы которых через уставки заданной скорости шахтной подъемной машины соединены с выходами...
Пристрій цифрової індикації розташування сосуду шахтної підйомної машини
Номер патенту: 5110
Опубліковано: 28.12.1994
Автори: Марищенко Олександр Іванович, Матвієнко Микола Павлович
МПК: B66B 3/02
Мітки: розташування, цифрової, машини, сосуду, підйомної, пристрій, шахтної, індикації
Формула / Реферат:
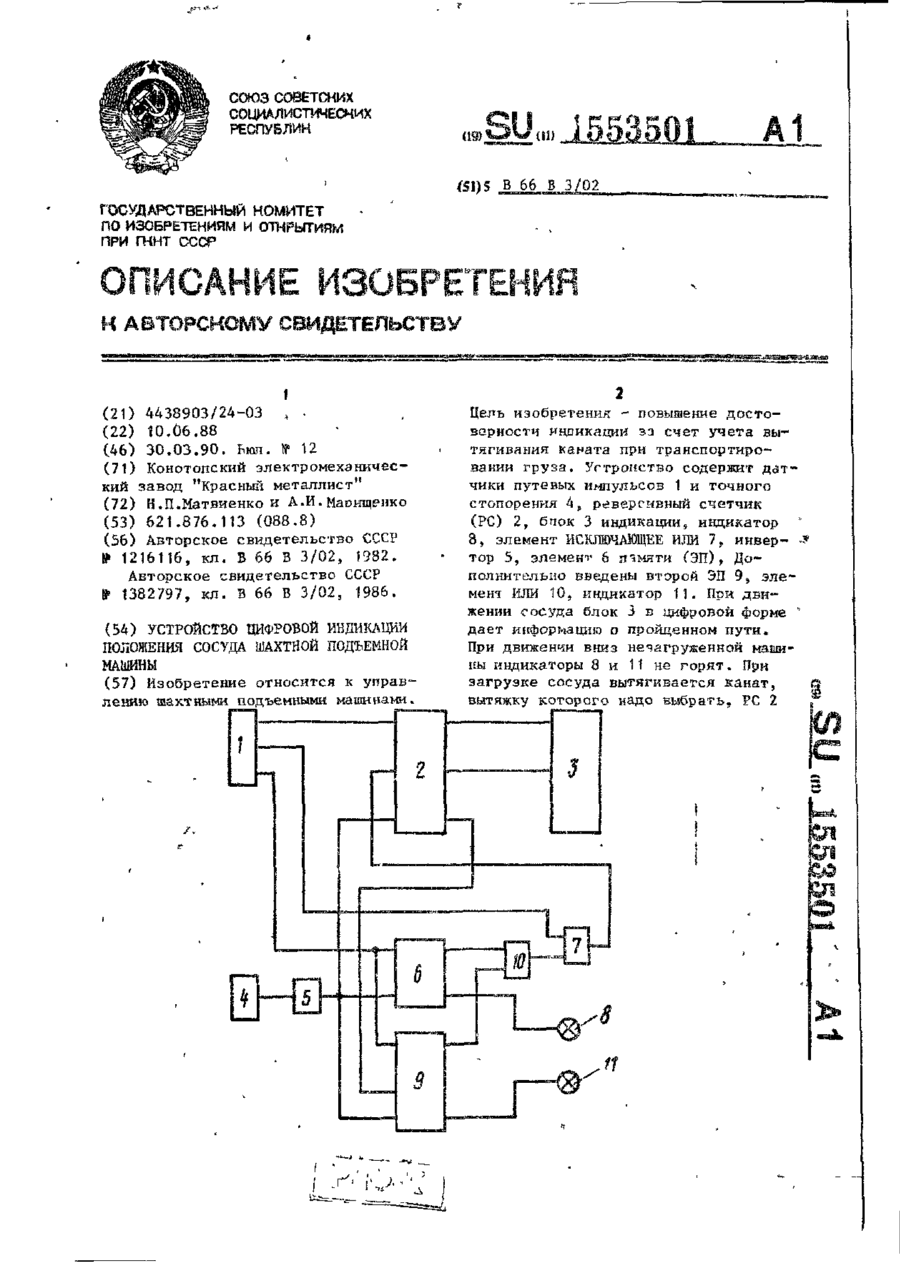
Устройство цифровой индикации положения сосуда шахтной подъемной машины, содержащее датчик путевых импульсов, соответствующие выходы которого соединены со счетным входом реверсивного счетчика, с входом элемента исключающее или, выход которого соединен с управляющим входом реверсивного счетчика, и с информационным входом первого элемента памяти, первый выход которого соединен с первым индикатором, блок цифровой индикации, входы которого...
Пристрій цифрової індикації розташування сосуду шахтної підйомної машини
Номер патенту: 6069
Опубліковано: 29.12.1994
Автори: Матвієнко Микола Павлович, Марищенко Олександр Іванович
Мітки: індикації, підйомної, машини, пристрій, розташування, сосуду, цифрової, шахтної
Формула / Реферат:
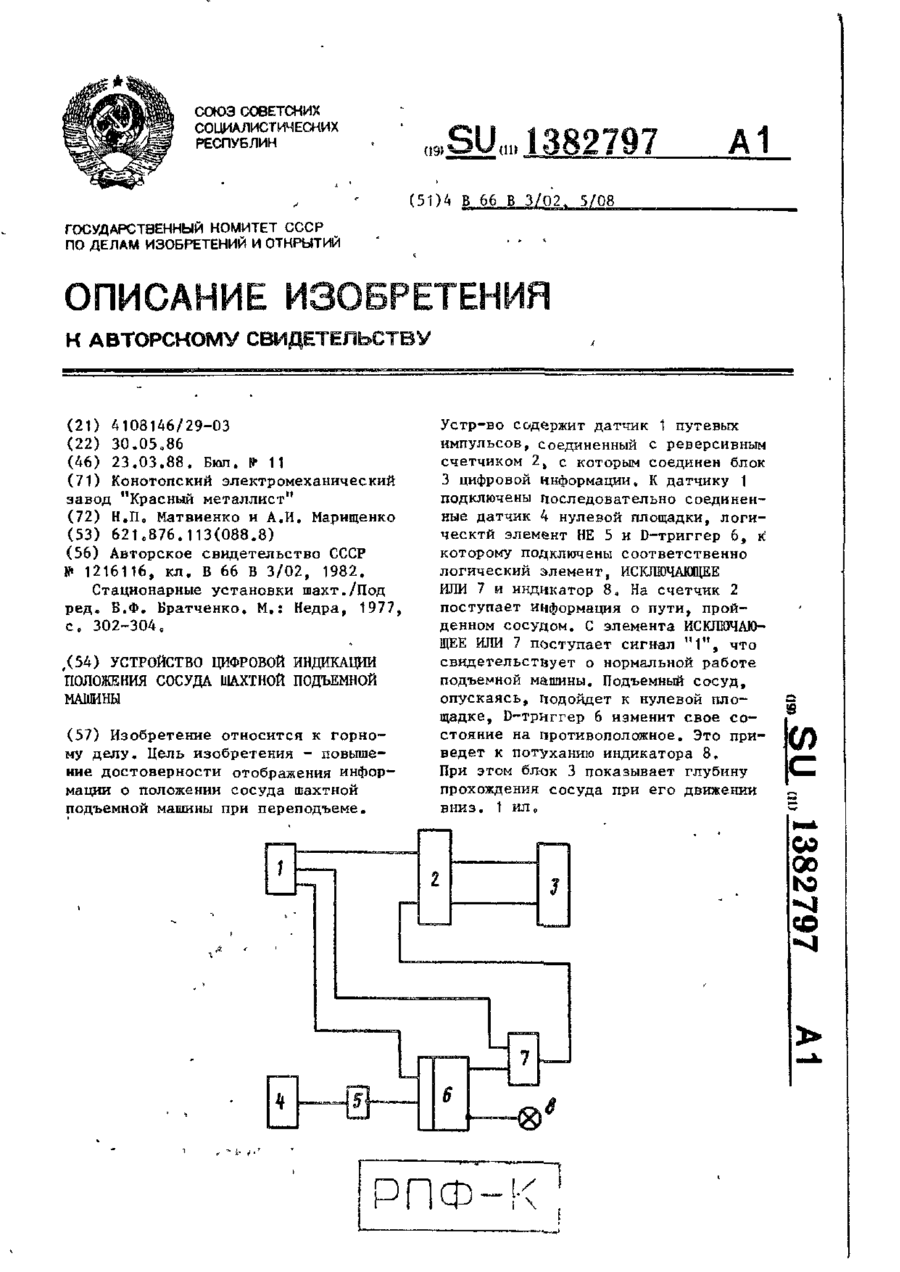
Устройство цифровой индикации положения сосуда шахтной подъемной машины, содержащее датчик путевых импульсов, выход которого соединен со счетным входом реверсивного счетчика, а также блок цифровой индикации, оба входа которого соединены с выходами реверсивного счетчика, отличающееся тем, что с целью повышения достоверности отображения информации о положении сосуда шахтной подъемной машины при переподь-еме, оно дополнительно снабжено...
Спосіб контролю параметрів провідників жорсткого армування двостороннього розташування та пристрій для його здійснення
Номер патенту: 77481
Опубліковано: 15.12.2006
Автори: Мялковський Валентин Йосипович, Грядущий Борис Абрамович, Евсюков Сергій Олександрович, Коваль Анатолій Миколайович, Карпунова Олена Вікторівна, Чехлатий Микола Олександрович
МПК: G01C 7/00
Мітки: двостороннього, контролю, параметрів, армування, спосіб, здійснення, жорсткого, провідників, розташування, пристрій
Формула / Реферат:
1. Спосіб контролю параметрів провідників жорсткого армування двостороннього розташування, відповідно до якого вимірюють відстані між першим провідником і транспортною посудиною , а також між другим провідником і транспортною посудиною у лобовому напрямку в горизонтальній площині, переміщують транспортну...
Попередній патент: Фарба трафаретна
Наступний патент: Живильне середовище для виділення збудника туберкульозу та спосіб виділення збудника туберкульозу
Випадковий патент: Спосіб визначення просторової будови кісткової тканини лицевого скелета в нормі та в умовах патології