Датчик
Номер патенту: 33684
Опубліковано: 10.07.2008
Автори: Михайлов Олександр Миколайович, Голубов Микола Васильович, Горобець Ігор Олексійович, Ілларіонов Дмитро Сергійович
Формула / Реферат
Датчик, що включає пружний елемент та тензорезистори, який відрізняється тим, що пружний елемент виконаний С-подібної форми, а в його нижній частині виконані отвори, а верхня частина має отвір для розміщення силоприймального елемента, причому тензорезистори розташовані на взаємно перпендикулярних площадках пружного елемента.
Текст
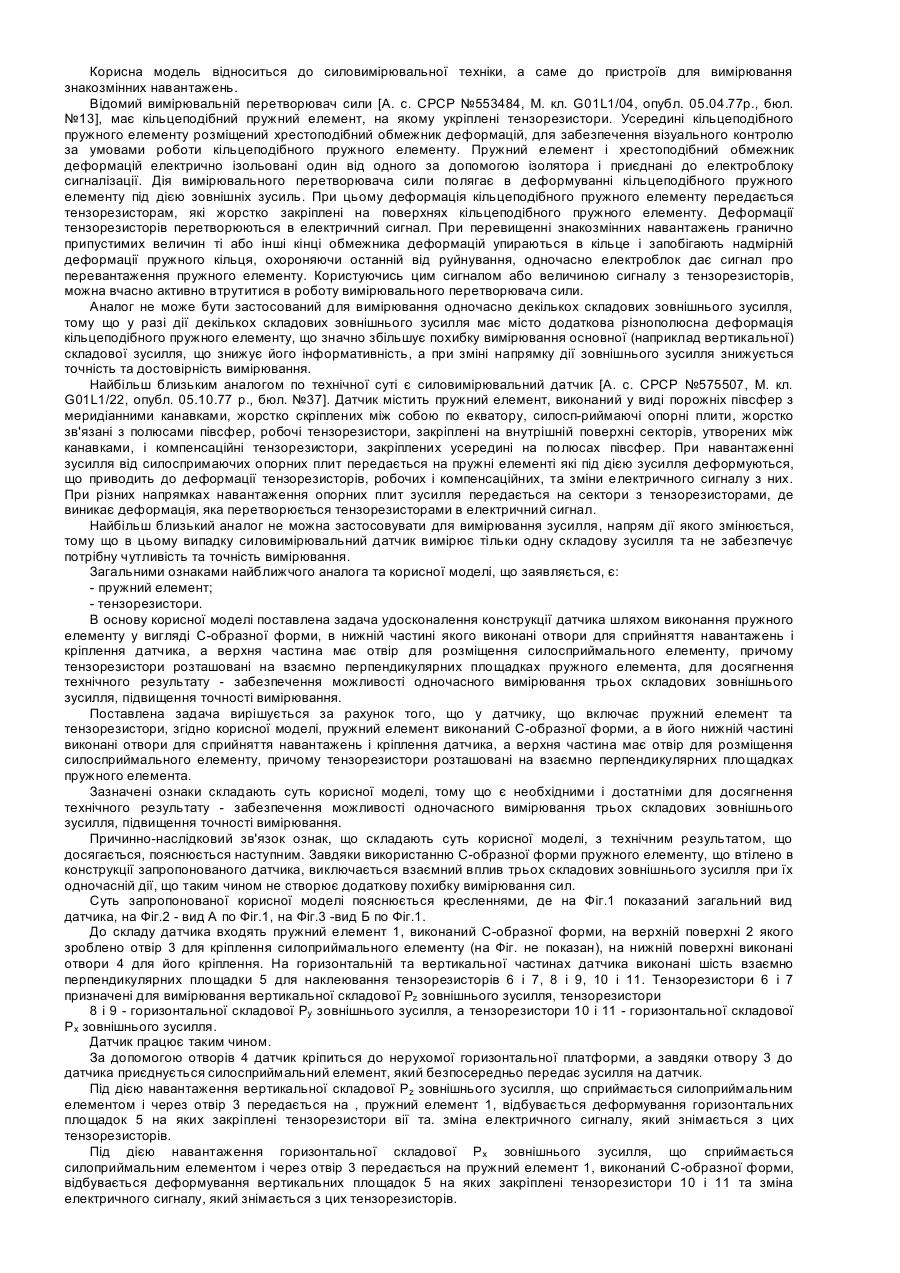
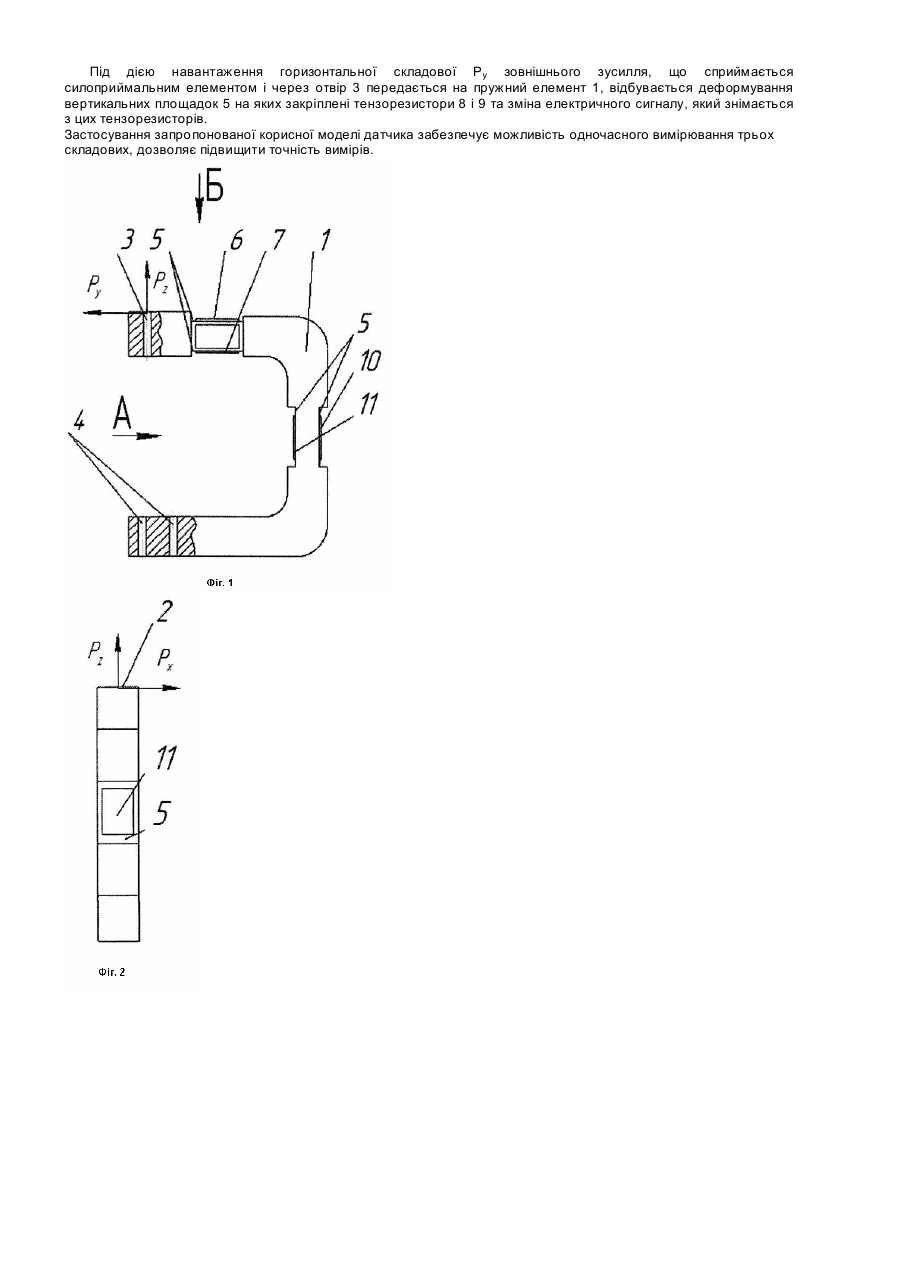
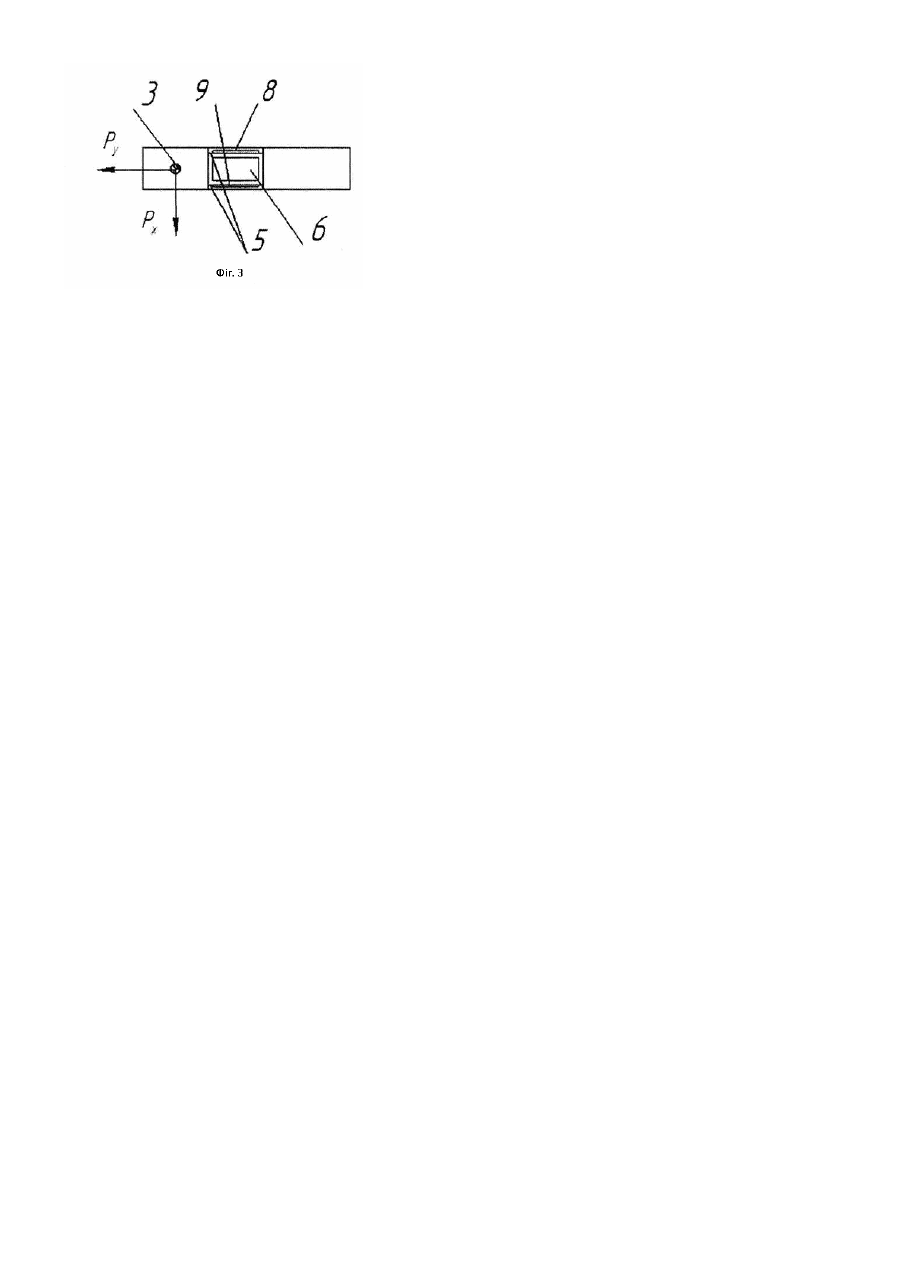
Корисна модель відноситься до силовимірювальної техніки, а саме до пристроїв для вимірювання знакозмінних навантажень. Відомий вимірювальній перетворювач сили [А. с. СРСР №553484, М. кл. G01L1/04, опубл. 05.04.77р., бюл. №13], має кільцеподібний пружний елемент, на якому укріплені тензорезистори. Усередині кільцеподібного пружного елементу розміщений хрестоподібний обмежник деформацій, для забезпечення візуального контролю за умовами роботи кільцеподібного пружного елементу. Пружний елемент і хрестоподібний обмежник деформацій електрично ізольовані один від одного за допомогою ізолятора і приєднані до електроблоку сигналізації. Дія вимірювального перетворювача сили полягає в деформуванні кільцеподібного пружного елементу під дією зовнішніх зусиль. При цьому деформація кільцеподібного пружного елементу передається тензорезисторам, які жорстко закріплені на поверхнях кільцеподібного пружного елементу. Деформації тензорезисторів перетворюються в електричний сигнал. При перевищенні знакозмінних навантажень гранично припустимих величин ті або інші кінці обмежника деформацій упираються в кільце і запобігають надмірній деформації пружного кільця, охороняючи останній від руйнування, одночасно електроблок дає сигнал про перевантаження пружного елементу. Користуючись цим сигналом або величиною сигналу з тензорезисторів, можна вчасно активно втрутитися в роботу вимірювального перетворювача сили. Аналог не може бути застосований для вимірювання одночасно декількох складових зовнішнього зусилля, тому що у разі дії декількох складових зовнішнього зусилля має місто додаткова різнополюсна деформація кільцеподібного пружного елементу, що значно збільшує похибку вимірювання основної (наприклад вертикальної) складової зусилля, що знижує його інформативність, а при зміні напрямку дії зовнішнього зусилля знижується точність та достовірність вимірювання. Найбільш близьким аналогом по технічної суті є силовимірювальний датчик [А. с. СРСР №575507, М. кл. G01L1/22, опубл. 05.10.77 р., бюл. №37]. Датчик містить пружний елемент, виконаний у виді порожніх півсфер з меридіанними канавками, жорстко скріплених між собою по екватору, силосп-риймаючі опорні плити, жорстко зв'язані з полюсами півсфер, робочі тензорезистори, закріплені на внутрішній поверхні секторів, утворених між канавками, і компенсаційні тензорезистори, закріплених усередині на полюсах півсфер. При навантаженні зусилля від силоспримаючих опорних плит передається на пружні елементі які під дією зусилля деформуються, що приводить до деформації тензорезисторів, робочих і компенсаційних, та зміни електричного сигналу з них. При різних напрямках навантаження опорних плит зусилля передається на сектори з тензорезисторами, де виникає деформація, яка перетворюється тензорезисторами в електричний сигнал. Найбільш близький аналог не можна застосовувати для вимірювання зусилля, напрям дії якого змінюється, тому що в цьому випадку силовимірювальний датчик вимірює тільки одну складову зусилля та не забезпечує потрібну чутливість та точність вимірювання. Загальними ознаками найближчого аналога та корисної моделі, що заявляється, є: - пружний елемент; - тензорезистори. В основу корисної моделі поставлена задача удосконалення конструкції датчика шляхом виконання пружного елементу у вигляді С-образної форми, в нижній частині якого виконані отвори для сприйняття навантажень і кріплення датчика, а верхня частина має отвір для розміщення силосприймального елементу, причому тензорезистори розташовані на взаємно перпендикулярних площадках пружного елемента, для досягнення технічного результату - забезпечення можливості одночасного вимірювання трьох складових зовнішнього зусилля, підвищення точності вимірювання. Поставлена задача вирішується за рахунок того, що у датчику, що включає пружний елемент та тензорезистори, згідно корисної моделі, пружний елемент виконаний С-образної форми, а в його нижній частині виконані отвори для сприйняття навантажень і кріплення датчика, а верхня частина має отвір для розміщення силосприймального елементу, причому тензорезистори розташовані на взаємно перпендикулярних площадках пружного елемента. Зазначені ознаки складають суть корисної моделі, тому що є необхідними і достатніми для досягнення технічного результату - забезпечення можливості одночасного вимірювання трьох складових зовнішнього зусилля, підвищення точності вимірювання. Причинно-наслідковий зв'язок ознак, що складають суть корисної моделі, з технічним результатом, що досягається, пояснюється наступним. Завдяки використанню С-образної форми пружного елементу, що втілено в конструкції запропонованого датчика, виключається взаємний вплив трьох складових зовнішнього зусилля при їх одночасній дії, що таким чином не створює додаткову похибку вимірювання сил. Суть запропонованої корисної моделі пояснюється кресленнями, де на Фіг.1 показаний загальний вид датчика, на Фіг.2 - вид А по Фіг.1, на Фіг.3 -вид Б по Фіг.1. До складу датчика входять пружний елемент 1, виконаний С-образної форми, на верхній поверхні 2 якого зроблено отвір 3 для кріплення силоприймального елементу (на Фіг. не показан), на нижній поверхні виконані отвори 4 для його кріплення. На горизонтальній та вертикальної частинах датчика виконані шість взаємно перпендикулярних площадки 5 для наклеювання тензорезисторів 6 і 7, 8 і 9, 10 і 11. Тензорезистори 6 і 7 призначені для вимірювання вертикальної складової Pz зовнішнього зусилля, тензорезистори 8 і 9 - горизонтальної складової Ру зовнішнього зусилля, а тензорезистори 10 і 11 - горизонтальної складової Рх зовнішнього зусилля. Датчик працює таким чином. За допомогою отворів 4 датчик кріпиться до нерухомої горизонтальної платформи, а завдяки отвору 3 до датчика приєднується силосприймальний елемент, який безпосередньо передає зусилля на датчик. Під дією навантаження вертикальної складової Pz зовнішнього зусилля, що сприймається силоприймальним елементом і через отвір 3 передається на , пружний елемент 1, відбувається деформування горизонтальних площадок 5 на яких закріплені тензорезистори вії та. зміна електричного сигналу, який знімається з цих тензорезисторів. Під дією навантаження горизонтальної складової Р х зовнішнього зусилля, що сприймається силоприймальним елементом і через отвір 3 передається на пружний елемент 1, виконаний С-образної форми, відбувається деформування вертикальних площадок 5 на яких закріплені тензорезистори 10 і 11 та зміна електричного сигналу, який знімається з цих тензорезисторів. Під дією навантаження горизонтальної складової Р у зовнішнього зусилля, що сприймається силоприймальним елементом і через отвір 3 передається на пружний елемент 1, відбувається деформування вертикальних площадок 5 на яких закріплені тензорезистори 8 і 9 та зміна електричного сигналу, який знімається з цих тензорезисторів. Застосування запропонованої корисної моделі датчика забезпечує можливість одночасного вимірювання трьох складових, дозволяє підвищити точність вимірів.
ДивитисяДодаткова інформація
Назва патенту англійськоюIndicator
Автори англійськоюMykhailov Oleksandr Mykolaiovych, Horobets Ihor Oleksiiovych, Holubov Mykola Vasyliovych, Illarionov Dmytro Serhiiovych
Назва патенту російськоюДатчик
Автори російськоюМихайлов Александр Николаевич, Горобец Игорь Алексеевич, Голубов Николай Васильевич, Илларионов Дмитрий Сергеевич
МПК / Мітки
МПК: G01L 1/22
Мітки: датчик
Код посилання
<a href="https://ua.patents.su/3-33684-datchik.html" target="_blank" rel="follow" title="База патентів України">Датчик</a>
Тензорезисторний датчик сили
Номер патенту: 28565
Опубліковано: 16.10.2000
Автори: Чечкін Володимир Олександрович, Нікітінський Михайло Павлович, Мельничук Георгій Костянтинович, Орлов Валерій Олександрович
МПК: G01L 1/22
Мітки: сили, датчик, тензорезисторний
Формула / Реферат:
1. Тензорезисторний датчик сили, що містить циліндрічний корпус з опорною частиною, силовводячий елемент, з'єднаний з корпусом мембраною, розташований в корпусі і виконаний у вигляді тіла обертання пружний елемент, на концентричних виступах якого розташовані тензорезистори, який відрізняється тим, що опорна частина пружного елемента закріплена на корпусі, а в циліндричному виточенні, виконаному в пружному елементі з боку опорної частини по...
Тензорезисторний датчик сили
Номер патенту: 35723
Опубліковано: 16.04.2001
Автори: Орлов Валерій Олександрович, Нікітінський Михайло Павлович
МПК: G01L 1/22
Мітки: сили, датчик, тензорезисторний
Формула / Реферат:
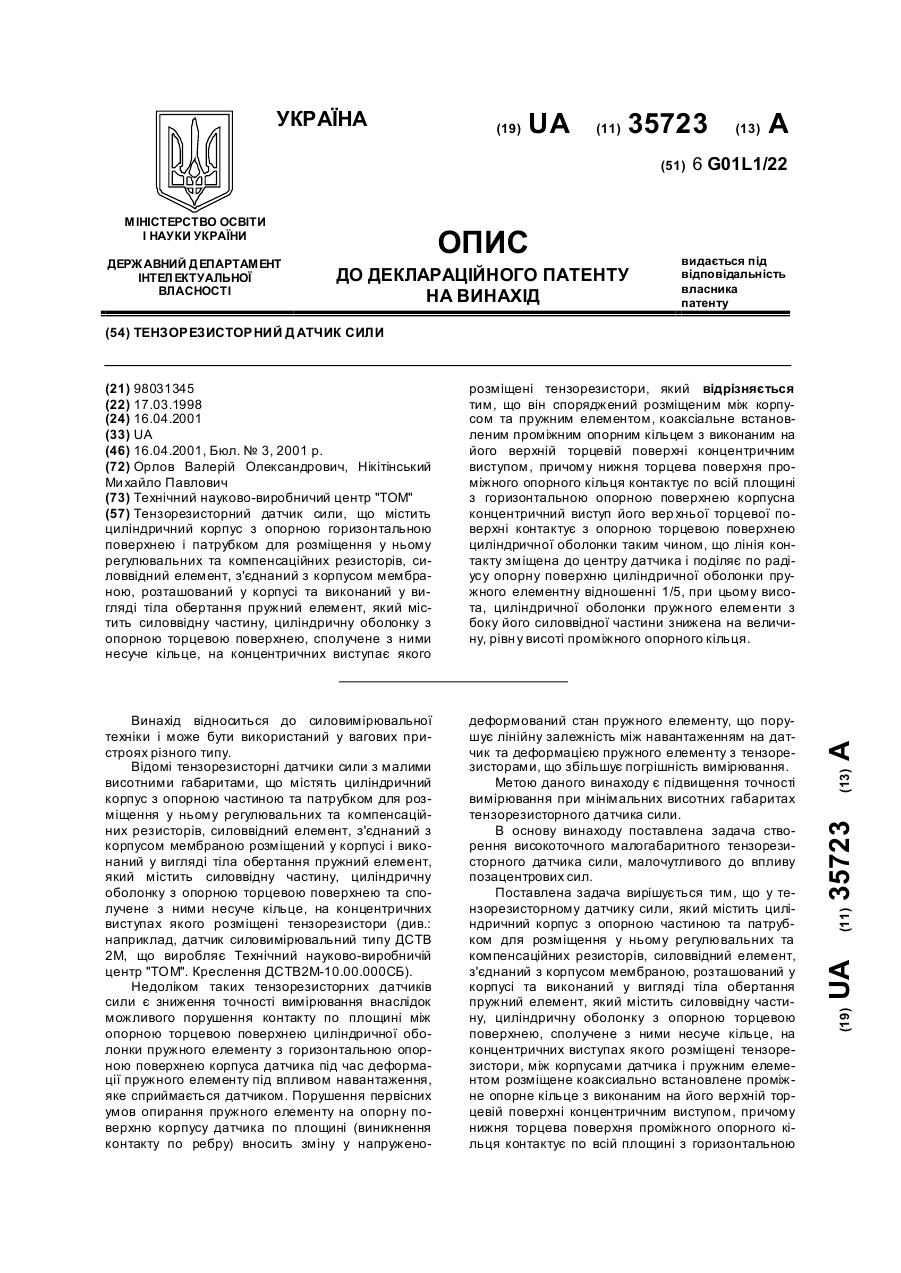
Тензорезисторний датчик сили, що містить циліндричний корпус з опорною горизонтальною поверхнею і патрубком для розміщення у ньому регулювальних та компенсаційних резисторів, силоввідний елемент, з'єднаний з корпусом мембраною, розташований у корпусі та виконаний у вигляді тіла обертання пружний елемент, який містить силоввідну частину, циліндричну оболонку з опорною торцевою поверхнею, сполучене з ними несуче кільце, на концентричних...
Тензорезисторний датчик сили
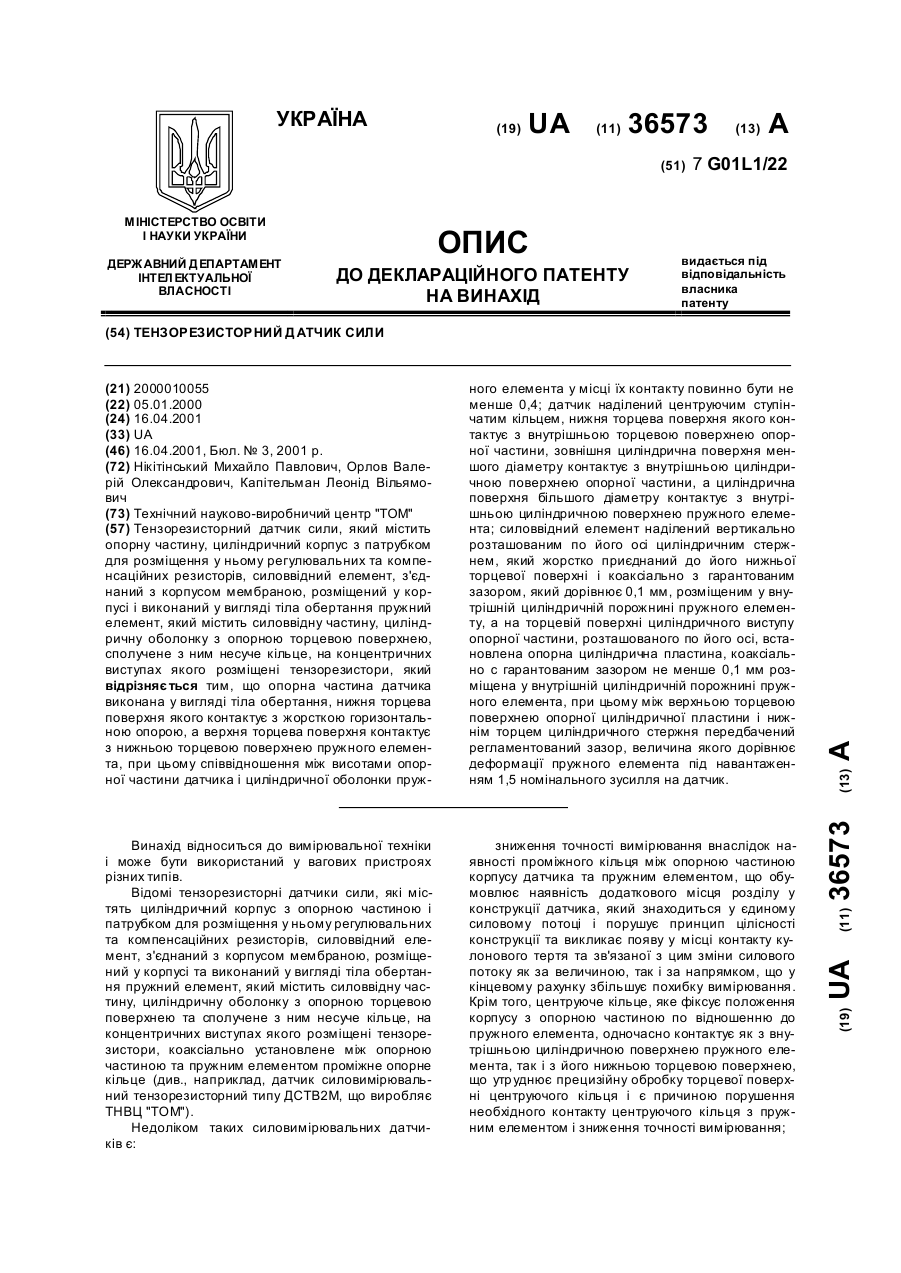
Номер патенту: 36573
Опубліковано: 16.04.2001
Автори: Капітельман Леонід Вільямович, Нікітінський Михайло Павлович, Орлов Валерій Олександрович
МПК: G01L 1/22
Мітки: тензорезисторний, сили, датчик
Текст:
...регульованих та компенсаційних резисторів, силоввідного елемента 3, який зв'язаний з корпусом і мембраною 4, закріпленою на силоввідному елементі 3 за допомогою кільця 5 через ущільнення 6, а на корпусі 1 за допомогою кільця 7 через ущільнення 3. Корпус 1 своєю нижньою торцевою поверхнею 9 через ущільнення 10 опирається на виконану у вигляді тіла обертання, опорну частину 11 датчика. У корпусі 1 розміщений виконаний у вигляді тіла...
Тензометричний датчик тиску
Номер патенту: 3059
Опубліковано: 26.12.1994
Автори: Мар'ямова Інна Йосипівна, Панков Юрій Михайлович
МПК: G01L 9/04
Мітки: тиску, датчик, тензометричний
Формула / Реферат:
Тензометрический датчик давления, содержащий корпус, мембрану, связанную посредством штока с жесткозащемленной с двух концов балкой, на одной из сторон которой размещены центральные и периферийные тензорезисторы, соединенные в мостовую измерительную схему, при этом каждый периферийный и центральный тензорезисторы включены в смежные плечи мостовой схемы, отличающийся тем, что тензорезисторы, входящие в смежные плечи мостовой схемы, расположены...
Датчик динамічного тиску
Номер патенту: 75915
Опубліковано: 15.06.2006
Автор: Тихан Мирослав Олексійович
МПК: G01L 23/00
Мітки: динамічного, тиску, датчик
Формула / Реферат:
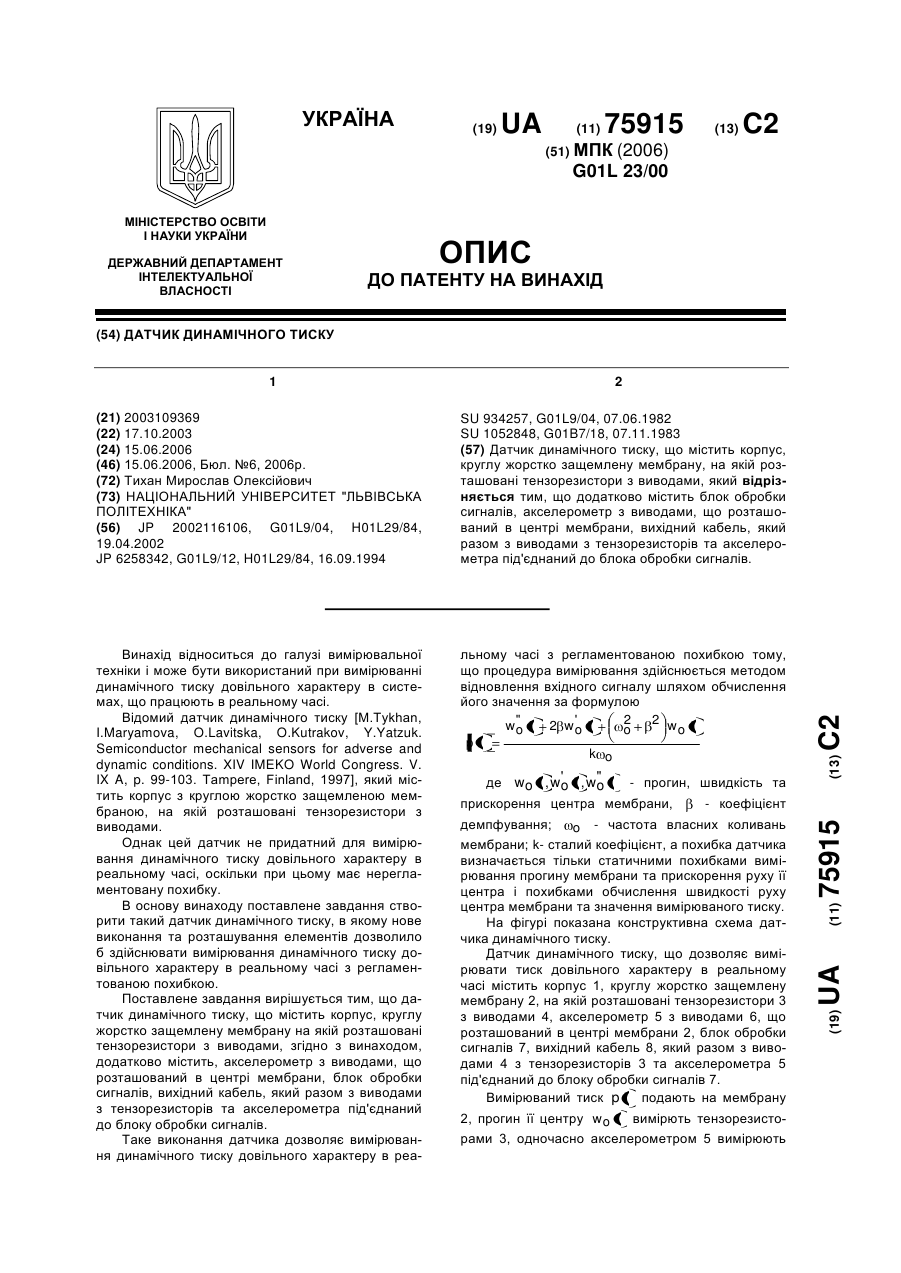
Датчик динамічного тиску, що містить корпус, круглу жорстко защемлену мембрану, на якій розташовані тензорезистори з виводами, який відрізняється тим, що додатково містить блок обробки сигналів, акселерометр з виводами, що розташований в центрі мембрани, вихідний кабель, який разом з виводами з тензорезисторів та акселерометра під'єднаний до блока обробки сигналів.
Попередній патент: Спосіб а.п. лябаха хірургічного лікування плосковальгусної деформації стопи
Наступний патент: Пристрій для очищення порожнистих виробів
Випадковий патент: Спосіб визначення об'єму пластичного матеріалу для пластики диспластичного дефекту кульшової западини при плануванні ендопротезування кульшового суглоба