Поворотний цифровий привід
Номер патенту: 34408
Опубліковано: 11.08.2008

Формула / Реферат
1. Поворотний цифровий привід, що містить нерухомий вал з каналами живлення, на якому послідовно розміщені з обмежувачами відносного повороту розрядні секції, в циліндричних розточках яких між кришками розміщені роздільники і закріплені на валах пластини з утворенням розрядних робочих камер, і секцію зворотного повороту, вал якої прикріплений до нерухомого вала, а корпус секції жорстко з'єднаний з валом розрядної секції старшого розряду і з вихідним валом, який відрізняється тим, що у кожній розрядній секції закріплені по два секторні роздільники і розміщені скріплені з валомпо дві пластини з утворенням двох робочих камер.
2. Поворотний цифровий привід за п. 1, який відрізняється тим, що площа бокової поверхні пластини секції зворотного повороту і площа бокової поверхні пластини розрядної секції рівні.
3. Поворотний цифровий привід за п. 1, який відрізняється тим, що обмежувачі відносного повороту розрядних секцій закріплені на зовнішніх поверхнях секцій з можливістю регулювання кута повороту.
4. Поворотний цифровий привід за п. 1, який відрізняється тим, що між розрядними секціями та між секцією зворотного повороту і закріпленим на нерухомому валу фланцем розміщені упорні підшипники кочення.
Текст
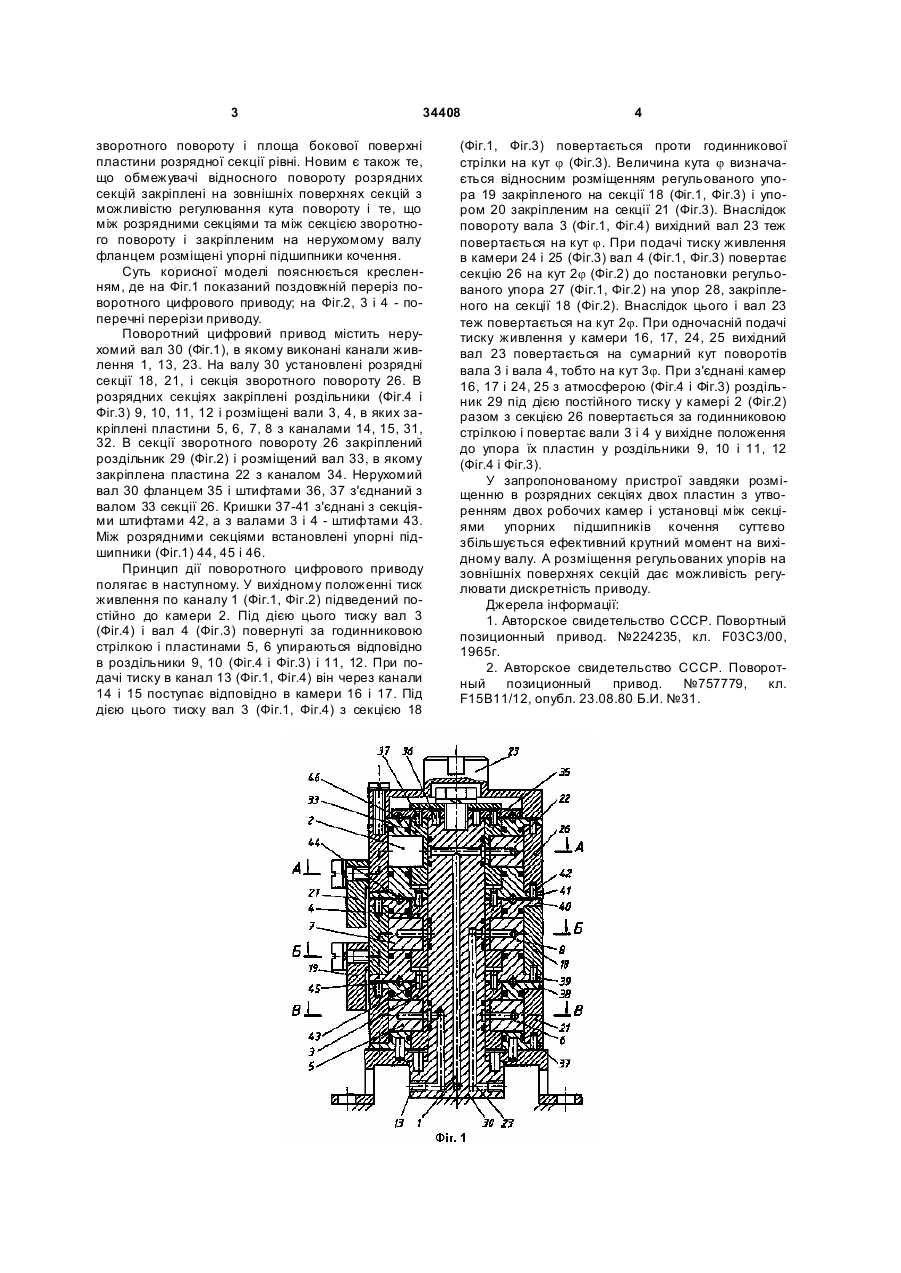
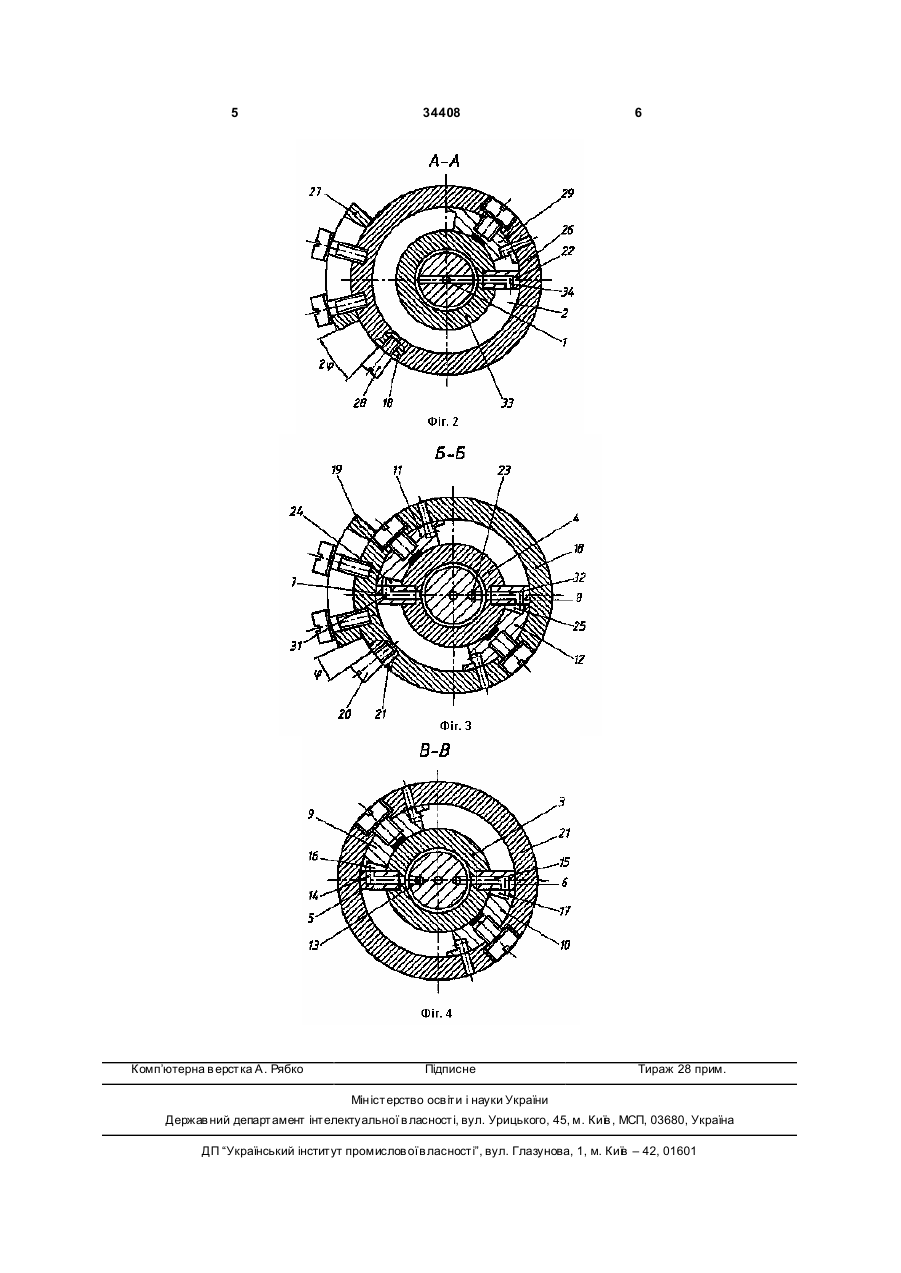
1. Поворотний цифровий привід, що містить нерухомий вал з каналами живлення, на якому послідовно розміщені з обмежувачами відносного повороту розрядні секції, в циліндричних розточках яких між кришками розміщені роздільники і закріплені на валах пластини з утворенням розрядних робочих камер, і секцію зворотного повороту, вал якої прикріплений до нерухомого вала, а корпус секції жорстко з'єднаний з валом розрядної секції старшого розряду і з вихідним валом, який 3 34408 зворотного повороту і площа бокової поверхні пластини розрядної секції рівні. Новим є також те, що обмежувачі відносного повороту розрядних секцій закріплені на зовнішніх поверхнях секцій з можливістю регулювання кута повороту і те, що між розрядними секціями та між секцією зворотного повороту і закріпленим на нерухомому валу фланцем розміщені упорні підшипники кочення. Суть корисної моделі пояснюється кресленням, де на Фіг.1 показаний поздовжній переріз поворотного цифрового приводу; на Фіг.2, 3 і 4 - поперечні перерізи приводу. Поворотний цифровий привод містить нерухомий вал 30 (Фіг.1), в якому виконані канали живлення 1, 13, 23. На валу 30 установлені розрядні секції 18, 21, і секція зворотного повороту 26. В розрядних секціях закріплені роздільники (Фіг.4 і Фіг.3) 9, 10, 11, 12 і розміщені вали 3, 4, в яких закріплені пластини 5, 6, 7, 8 з каналами 14, 15, 31, 32. В секції зворотного повороту 26 закріплений роздільник 29 (Фіг.2) і розміщений вал 33, в якому закріплена пластина 22 з каналом 34. Нерухомий вал 30 фланцем 35 і штифтами 36, 37 з'єднаний з валом 33 секції 26. Кришки 37-41 з'єднані з секціями штифтами 42, а з валами 3 і 4 - штифтами 43. Між розрядними секціями встановлені упорні підшипники (Фіг.1) 44, 45 і 46. Принцип дії поворотного цифрового приводу полягає в наступному. У вихідному положенні тиск живлення по каналу 1 (Фіг.1, Фіг.2) підведений постійно до камери 2. Під дією цього тиску вал 3 (Фіг.4) і вал 4 (Фіг.3) повернуті за годинниковою стрілкою і пластинами 5, 6 упираються відповідно в роздільники 9, 10 (Фіг.4 і Фіг.3) і 11, 12. При подачі тиску в канал 13 (Фіг.1, Фіг.4) він через канали 14 і 15 поступає відповідно в камери 16 і 17. Під дією цього тиску вал 3 (Фіг.1, Фіг.4) з секцією 18 4 (Фіг.1, Фіг.3) повертається проти годинникової стрілки на кут j (Фіг.3). Величина кута j визначається відносним розміщенням регульованого упора 19 закріпленого на секції 18 (Фіг.1, Фіг.3) і упором 20 закріпленим на секції 21 (Фіг.3). Внаслідок повороту вала 3 (Фіг.1, Фіг.4) вихідний вал 23 теж повертається на кут j. При подачі тиску живлення в камери 24 і 25 (Фіг.3) вал 4 (Фіг.1, Фіг.3) повертає секцію 26 на кут 2j (Фіг.2) до постановки регульованого упора 27 (Фіг.1, Фіг.2) на упор 28, закріпленого на секції 18 (Фіг.2). Внаслідок цього і вал 23 теж повертається на кут 2j. При одночасній подачі тиску живлення у камери 16, 17, 24, 25 вихідний вал 23 повертається на сумарний кут поворотів вала 3 і вала 4, тобто на кут 3j. При з'єднані камер 16, 17 і 24, 25 з атмосферою (Фіг.4 і Фіг.3) роздільник 29 під дією постійного тиску у камері 2 (Фіг.2) разом з секцією 26 повертається за годинниковою стрілкою і повертає вали 3 і 4 у вихідне положення до упора їх пластин у роздільники 9, 10 і 11, 12 (Фіг.4 і Фіг.3). У запропонованому пристрої завдяки розміщенню в розрядних секціях двох пластин з утворенням двох робочих камер і установці між секціями упорних підшипників кочення суттєво збільшується ефективний крутний момент на вихідному валу. А розміщення регульованих упорів на зовнішніх поверхнях секцій дає можливість регулювати дискретність приводу. Джерела інформації: 1. Авторское свидетельство СССР. Повортный позиционный привод. №224235, кл. F03С3/00, 1965г. 2. Авторское свидетельство СССР. Поворотный позиционный привод. №757779, кл. F15В11/12, опубл. 23.08.80 Б.И. №31. 5 Комп’ютерна в ерстка А. Рябко 34408 6 Підписне Тираж 28 прим. Міністерство осв іт и і науки України Держав ний департамент інтелектуальної в ласності, вул. Урицького, 45, м. Київ , МСП, 03680, Україна ДП “Український інститут промислов ої в ласності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюRotary digital drive
Автори англійськоюNovik Mykola Andriiovych, Kucheruk Yurii Mykolaiovych
Назва патенту російськоюПоворотный цифровой привод
Автори російськоюНовик Николай Андреевич, Кучерук Юрий Николаевич
МПК / Мітки
МПК: F15B 7/00
Мітки: привід, цифровий, поворотний
Код посилання
<a href="https://ua.patents.su/3-34408-povorotnijj-cifrovijj-privid.html" target="_blank" rel="follow" title="База патентів України">Поворотний цифровий привід</a>
Двовідліковий аналого-цифровий привід керування кутом повороту антени рлс
Номер патенту: 28552
Опубліковано: 10.12.2007
Автор: Ніколенко Сергій Іванович
МПК: G08C 19/00
Мітки: аналого-цифровий, рлс, двовідліковий, керування, кутом, антени, привід, повороту
Формула / Реферат:
Двовідліковий аналого-цифровий привід керування кутом повороту антени PЛC, що містить електронний сельсин-датчик, вхід якого підключений до входу сельсина-приймача, його вхідна вісь з'єднана з однією вхідною віссю редуктора, а вихід сельсина-приймача з'єднаний з одним із входів підсилювача, вихід підсилювача підключений до входу двигуна, вихідна вісь двигуна підключена до іншої вхідної осі редуктора, вихідна вісь якого з'єднана з віссю...
Пристрій поворотний
Номер патенту: 71322
Опубліковано: 15.11.2004
Автор: ШИНСЬКИЙ ІГОР ОЛЕГОВИЧ
МПК: B65G 47/53
Мітки: пристрій, поворотний
Формула / Реферат:
Пристрій поворотний, що містить рольгангову секцію з вертикальною віссю, встановленою з можливістю повороту на станині, реверсивний привід, зв'язаний з конічною парою для повороту рольгангової секції та з ланцюговою передачею обертання роликів рольгангової секції, а також закріплені на станині два нерухомі упори і на рольганговій секції - консоль, встановлену з можливістю почергової взаємодії з нерухомими упорами, який відрізняється тим, що...
Поворотний пристрій короба для прокладання кабелів і проводів
Номер патенту: 13272
Опубліковано: 15.03.2006
Автори: Іордан Євгенія Леопольдівна, Гороховський В'ячеслав Павлович
МПК: H02G 3/04
Мітки: кабелів, прокладання, пристрій, проводів, короба, поворотний
Формула / Реферат:
1. Поворотний пристрій короба для прокладання кабелів і проводів, що містить шарнірно з'єднані між собою півколами поворотні секції, корпуси яких мають П-подібний профіль поперечного перерізу і забезпечені П-подібними профільними кришками, який відрізняється тим, що бокові стінки поворотних секцій в місці з'єднання з суміжними поворотними секціями виступають за межі ділянок корпусів поворотних секцій з П-подібним профілем поперечного перерізу...
Поворотний передкрилок
Номер патенту: 1089
Опубліковано: 15.11.2001
Автор: Моргун Олександр Павлович
МПК: B64C 9/00
Мітки: передкрилок, поворотний
Формула / Реферат:
Поворотний передкрилок крила літака, що містить аеродинамічний несиметричний профіль, встановлений над передньою кромкою крила з можливістю руху відносно крила під дією піднімальної сили передкрила, який відрізняється тим, що аеродинамічний несиметричний профіль установлено на осі повороту та розміщено уздовж передньої кромки крила літака, а центр аеродинамічного тиску передкрилка зміщений від осі повороту відносно напрямку польоту вперед,...
Поворотний механізм стрілового вантажопідйомного крана
Номер патенту: 5851
Опубліковано: 15.03.2005
Автори: Анохін Юрій Олександрович, Комаров Олександр Федорович, Омельченко Володимир Іванович, Карпов Володимир Петрович
МПК: B66C 23/84
Мітки: стрілового, крана, поворотний, механізм, вантажопідйомного
Формула / Реферат:
Поворотний механізм стрілового вантажопідйомного крана, який включає нерухомий зубчатий вінець, поворотну платформу, установлену над нерухомим зубчатим вінцем, привід з редуктором, що встановлені на поворотній платформі, вал повороту платформи, який виконаний з зубчатою шестірнею, з'єднаний з вихідною ланкою редуктора і встановлений на поворотній платформі з можливістю зачеплення зубчатої шестірні з нерухомим зубчатим вінцем, який...
Попередній патент: Композиційний підшипниковий матеріал на основі алюмінію
Наступний патент: Теплообмінний блок теплоутилізатора
Випадковий патент: Спосіб вимірювання ступеня просторової когерентності лазерного випромінювання та пристрій для його реалізації