Дводіапазонні електромеханічні ваги
Номер патенту: 35005
Опубліковано: 26.08.2008
Формула / Реферат
Дводіапазонні електромеханічні ваги, що містять вантажоприймальну платформу на пружному підвісі, нерівноплечий вимірювальний важіль, установлений на нерухомій основі, одне плече якого через передавальний пружний елемент з'єднане з силовим входом силовимірювального датчика, а друге через електромагнітний фіксатор - з центром жорсткості платформи, мікропроцесорний блок вимірювання маси, цифровий індикатор, блок живлення, які відрізняються тим, що в них додатково введено датчик лінійних переміщень, фазочутливий підсилювач, випрямляч, аналого-цифровий перетворювач та другий цифровий індикатор, причому рухомий сердечник датчика механічно з'єднаний з електромагнітним фіксатором, а котушка датчика установлена на нерухомій основі і через підсилювач, випрямляч і аналого-цифровий перетворювач підключена до другого цифрового індикатора.
Текст
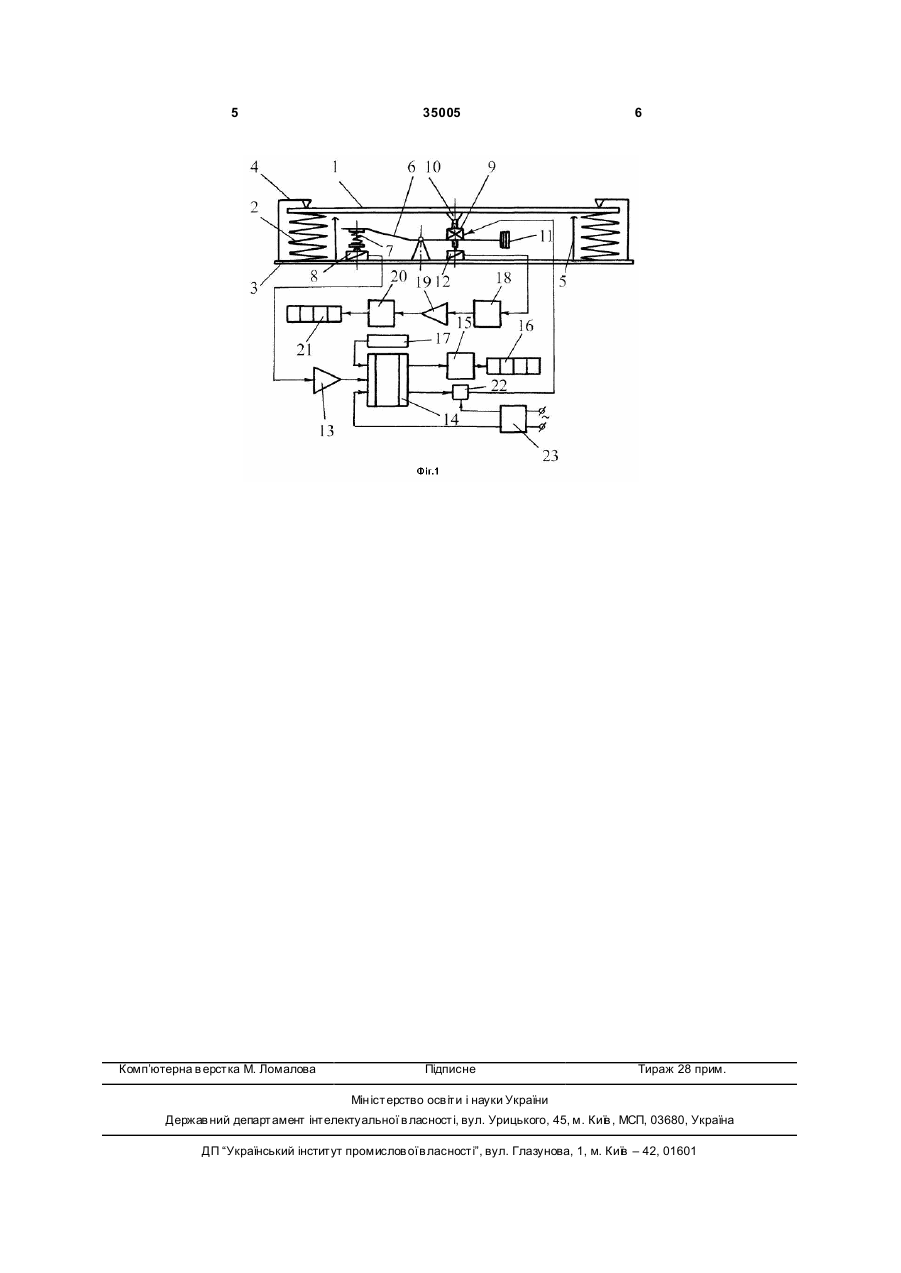
Дводіапазонні електромеханічні ваги, що містять вантажоприймальну платформу на пружному підвісі, нерівноплечий вимірювальний важіль, установлений на нерухомій основі, одне плече якого через передавальний пружний елемент з'єднане з 3 35005 тодом від'єднання маси і підвищення точності зважування та дозування сипучих та рідких матеріалів. Поставлена задача вирішена тим, що запропоновані двохдіапазонні електромеханічні ваги, до складу яких входять: вантажоприймальна платформа на пружному підвісі; нерівноплечовий вимірювальний важіль, установлений на нерухомій основі, одне плече котрого через передавальний пружний елемент з'єднане з силовим входом силовимірювального датчика, а друге через електромагнітний фіксатор - з центром жорсткості платформи; мікропроцесорний блок вимірювання маси; цифровий індикатор; блок живлення, в них згідно з корисною моделлю, додатково введено датчик лінійних переміщень, фазочутливий підсилювач, випрямляч, аналого-цифровий перетворювач та другий цифровий індикатор, причому рухомий сердечник датчика механічно з'єднаний з електромагнітним фіксатором, а катушка датчика установлена на нерухомій основі і через підсилювач, випрямляч і аналого-цифровий перетворювач підключена до другого цифрового індикатора. Запропоновані електромеханічні ваги дозволяють отримати інформацію про масу вантажу на їх плаформі в будь-який момент часу, завдяки введенню датчика лінійних переміщень, механічно з'єднаного з електромагнітним фіксатором. Для пояснення запропонованої корисної моделі на Фіг.1 зображено конструктивнофункціональну схему вагів. Вантажоприймальна платформа 1 установлена на основних пружних елементах 2, які закріплені на нерухомій основі 3. Для обмеження переміщення платформи 1 у вертикальній площині слугують верхні 4 та нижні 5 обмежувачі. Під платформою 1 на нерухомій основі 3 установлено нерівноплечовий вимірювальний важіль 6 першого роду, одне плече котрого через передавальний пружний елемент 7 з'єднано з силовим входом силовимірювального датчика 8, а друге плече через електромагнітний фіксатор 9 і шарнір 10 з'єднано з платформою 1 в її центрі жорсткості. Важіль 6 має противагу 11 для його квазіврівноваження. Датчик 12 лінійних переміщень платформи 1 (наприклад диференціальнотрансформаторний) має рухомий сердечник (на схемі не показаний) і катушк у, установлену на нерухомій основі 3. Вихід датчика 8 через підсилювач 13 підключений до мікропроцесорного блока 14 вимірювання маси, вихід котрого через транскриптор 15 підключений до цифрового індикатора 16. Блок 14 має клавіатуру 17. Датчик 12 через фазочутли вий випрямяч 18, підсилювач 19 і аналого-цифровий перетворювач 20 підключений до цифрового індикатора 21. Крім того, вихід блока 14 через блок 22 управління з'єднаний з електромагнітним фіксатором 9. Живлення елементів схеми 4 здійснюється від блока 23 живлення, підключеного до мережі змінного струму напругою 220В. Запропоновані електромеханічні ваги працюють наступним чином. У вихідному стані платформа 1 порожня, електромагнітний фіксатор 9 вимкнений і на індикаторах 16 і 21 висвітлені нулі. Після навантаження платформи 1 вихідний сигнал датчика 12 зростає і після обробки в блоках 18, 19 і 20 надходить на вхід індикатора 21, на якому висвітлюється маса вантажу. При цьому електромагнітний фіксатор 9 залишається вимкненим, тобто механічний зв'язок датчика 8 з платформою 1 відсутній і на індикаторі 16 висвітлюються нулі. Після вмикання фіксатора 9 з'являється механічний зв'язок між центром жорсткості платформи 1 і силовим входом датчика 8, тобто здійснюється перехід на другий діапазон вимірювання маси, який, принаймні на порядок менший ніж перший. Другий діапазон може бути використаний при дискретному дозуванні матеріалів методом від'єднання маси від ваг. В цьому випадку при зменшенні маси вантажу на платформі 1 збільшується сила на силовому вході датчика 8, яка є пропорційною масі від'єднаного від платформи 1 матеріалу. Вихідний сигнал датчика 8 після обробки в блоках 13, 14 і 15 надходить на вхід індикатора 11, де висвітлюється маса від'єднаного матеріалу (сипучого чи рідкого). Одночасно можна слідкувати за процесом дозування, а якщо потрібно то і реєструвати загальну масу матеріалу, що знаходиться на платформі 1 в реальному масштабі часу. Перехід з першого діапазону на другий і навпаки здійснюється з блока 22 управління електромагнітним фіксатором 9 шляхом вмикання чи вимикання останнього за допомогою клавіатури 17 або по команді із схеми автоматичного управління. При застосуванні запропонованих двохдіапазонних вагів для статичного зважування вантажів або для дозування матеріалів методом приєднання маси до вагів необхідно замінити в них важіль 6 першого роду на важіль другого роду. В цьому випадку ваговимірювальна схема залишається без змін. Таким чином, запропоновані двохдіапазонні електромеханічні ваги, на відміну від прототипу та інших аналогів, дають змогу одержати новий технічний ефект, виражений у можливості одержання інформації про масу матеріалу на платформі вагів в реальному масштабі часу за рахунок додаткового введення в них датчика лінійних переміщень та підвищення точності зважування та дозування сипучих та рідких матеріалів при їх дозуванні методом від'єднання маси від вагів. Це створює передумови для отримання економічного ефекту при експлуатації запропонованих вагів в те хнологічних процесах ливарного виробництва і металургії. 5 Комп’ютерна в ерстка М. Ломалова 35005 6 Підписне Тираж 28 прим. Міністерство осв іт и і науки України Держав ний департамент інтелектуальної в ласності, вул. Урицького, 45, м. Київ , МСП, 03680, Україна ДП “Український інститут промислов ої в ласності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюTwo-range electrical-mechanical scale
Автори англійськоюBohdan Kim Stepanovych, Sankin Anatolii Oleksiiovych
Назва патенту російськоюДвухдиапазонные электромеханические весы
Автори російськоюБогдан Ким Степанович, Санкин Анатолий Алексеевич
МПК / Мітки
МПК: G01G 19/00
Мітки: ваги, електромеханічні, дводіапазонні
Код посилання
<a href="https://ua.patents.su/3-35005-dvodiapazonni-elektromekhanichni-vagi.html" target="_blank" rel="follow" title="База патентів України">Дводіапазонні електромеханічні ваги</a>
Ваги
Номер патенту: 32706
Опубліковано: 15.02.2001
Автор: Галченко Семен Микитович
МПК: G01G 1/00
Мітки: ваги
Формула / Реферат:
Ваги, що містять корпус та вантажну і гирьову платформи, які відрізняються тим, що кінематичний ваговий зв'язок між платформами здійснюється за допомогою циліндричного валу, прикріпленого нерухомо до гирьової платформи, а до корпуса вагів і до вантажної платформи за допомогою тонких, гнучких стрічок, які забезпечують рухомість платформи, а гирьова платформа має 10 поперечних пазів, які знаходяться один від одного на відстані рівній діаметру...
Ваги
Номер патенту: 42970
Опубліковано: 15.11.2001
Автори: Браз Давид Леонідович, Альтман Ілля Аронович
МПК: G01G 19/02
Мітки: ваги
Формула / Реферат:
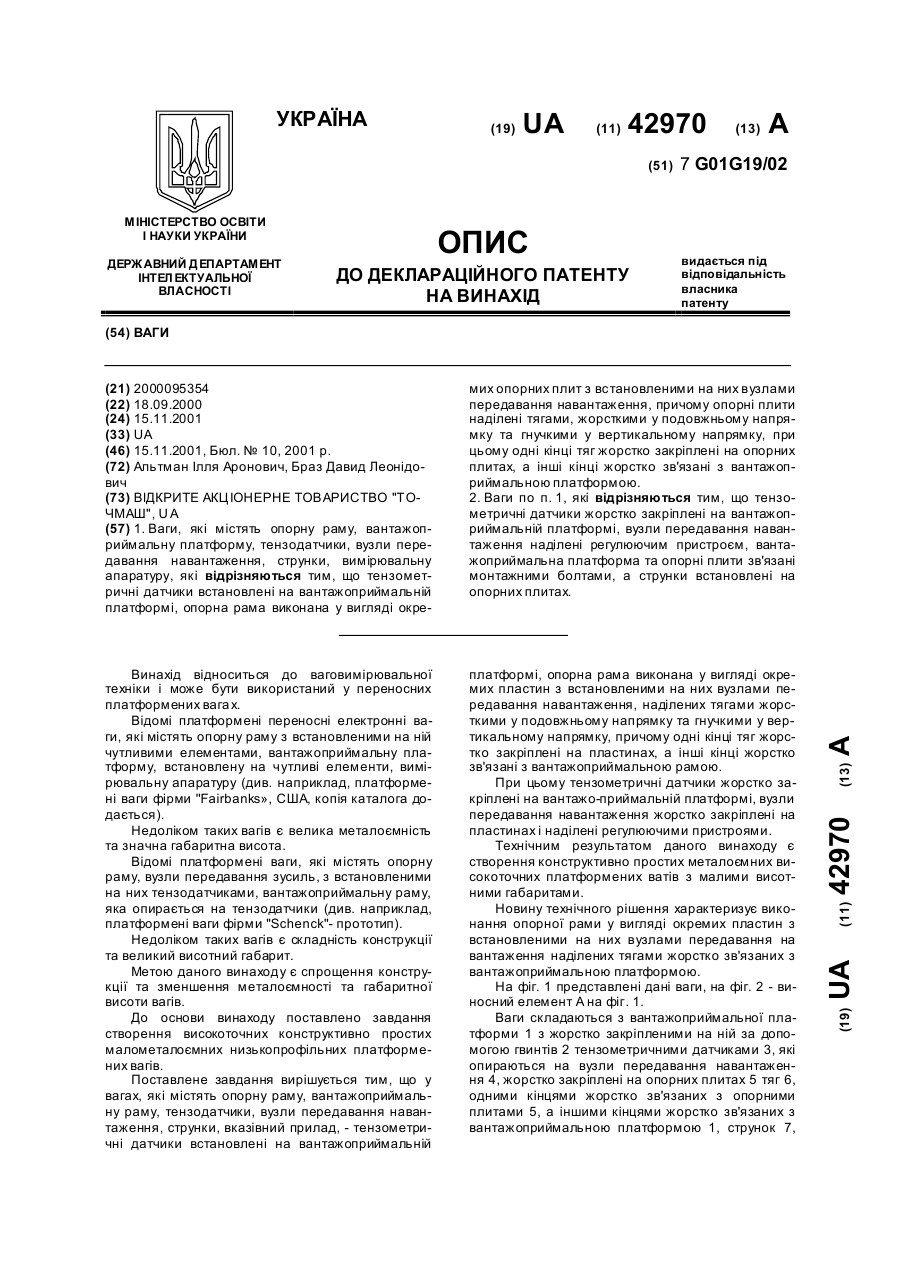
1. Ваги, які містять опорну раму, вантажоприймальну платформу, тензодатчики, вузли передавання навантаження, струнки, вимірювальну апаратуру, які відрізняються тим, що тензометричні датчики встановлені на вантажоприймальній платформі, опорна рама виконана у вигляді окремих опорних плит з встановленими на них вузлами передавання навантаження, причому опорні плити наділені тягами, жорсткими у подовжньому напрямку та гнучкими у вертикальному...
Конвеєрні ваги
Номер патенту: 9530
Опубліковано: 17.10.2005
Автор: Тимофєєва Юлія Володимирівна
МПК: G01G 11/00
Формула / Реферат:
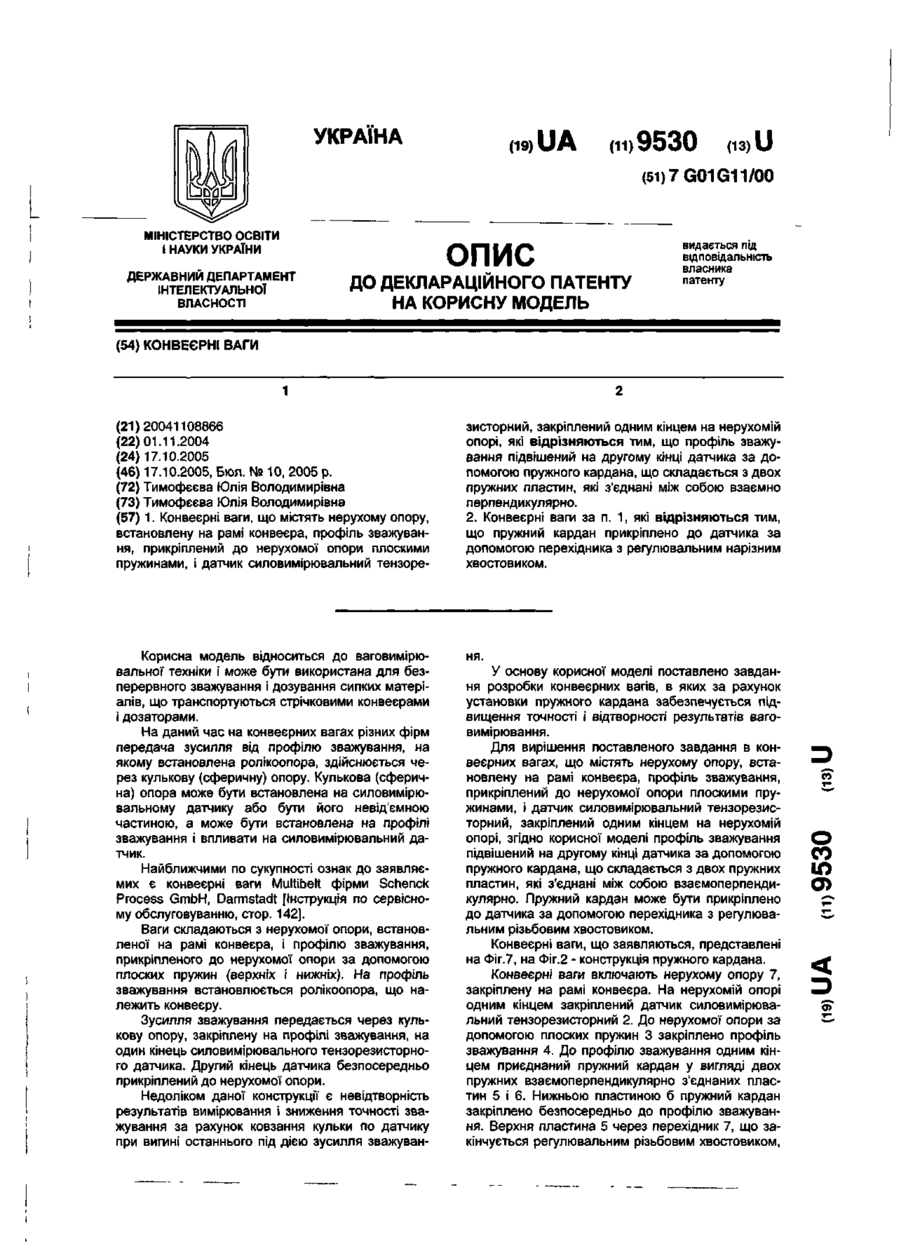
1. Конвеєрні ваги, що містять нерухому опору, встановлену на рамі конвеєра, профіль зважування, прикріплений до нерухомої опори плоскими пружинами, і датчик силовимірювальний тензорезисторний, закріплений одним кінцем на нерухомій опорі, які відрізняються тим, що профіль зважування підвішений на другому кінці датчика за допомогою пружного кардана, що складається з двох пружних пластин, які з'єднані між собою взаємно перпендикулярно.2....
Ваги
Номер патенту: 70344
Опубліковано: 15.10.2004
Автор: Галченко Семен Микитович
МПК: G01G 3/00, G01N 21/00
Мітки: ваги
Формула / Реферат:
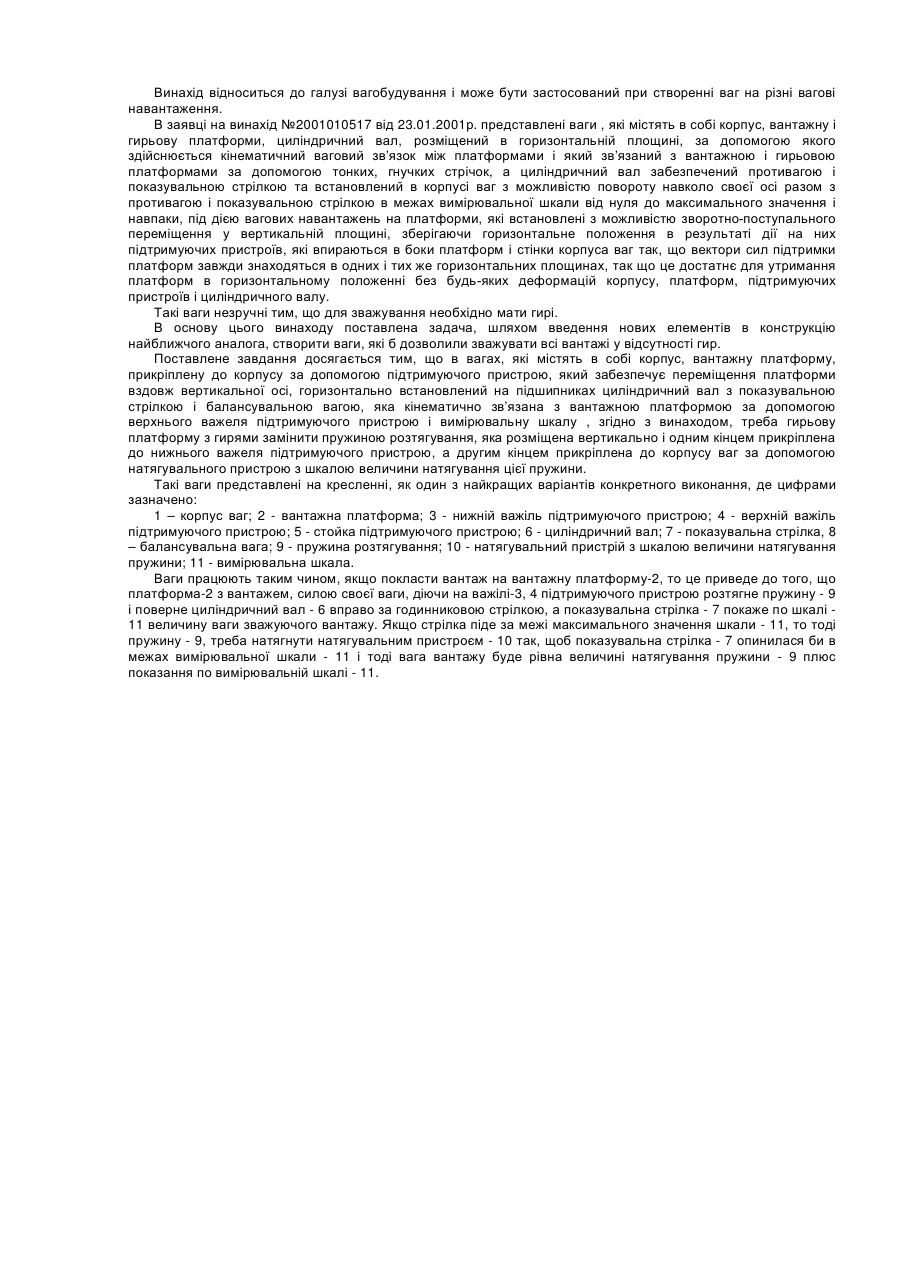
Ваги, які містять корпус, вантажну платформу, прикріплену до корпусу за допомогою підтримуючого пристрою, який забезпечує переміщення платформи вздовж вертикальної осі, горизонтально встановлений на підшипниках циліндричний вал з показувальною стрілкою і балансувальною вагою, який кінематично зв’язаний з вантажною платформою за допомогою верхнього важеля підтримуючого пристрою, і вимірювальну шкалу, які відрізняються тим, що мають пружину,...
Ваги для зважування транспортних засобів
Номер патенту: 37468
Опубліковано: 15.05.2001
Автори: Фурер Олександр Мойсейович, Альтман Ілля Аронович, Браз Давид Леонідович
МПК: G01G 19/00, B60S 5/00
Мітки: транспортних, засобів, зважування, ваги
Формула / Реферат:
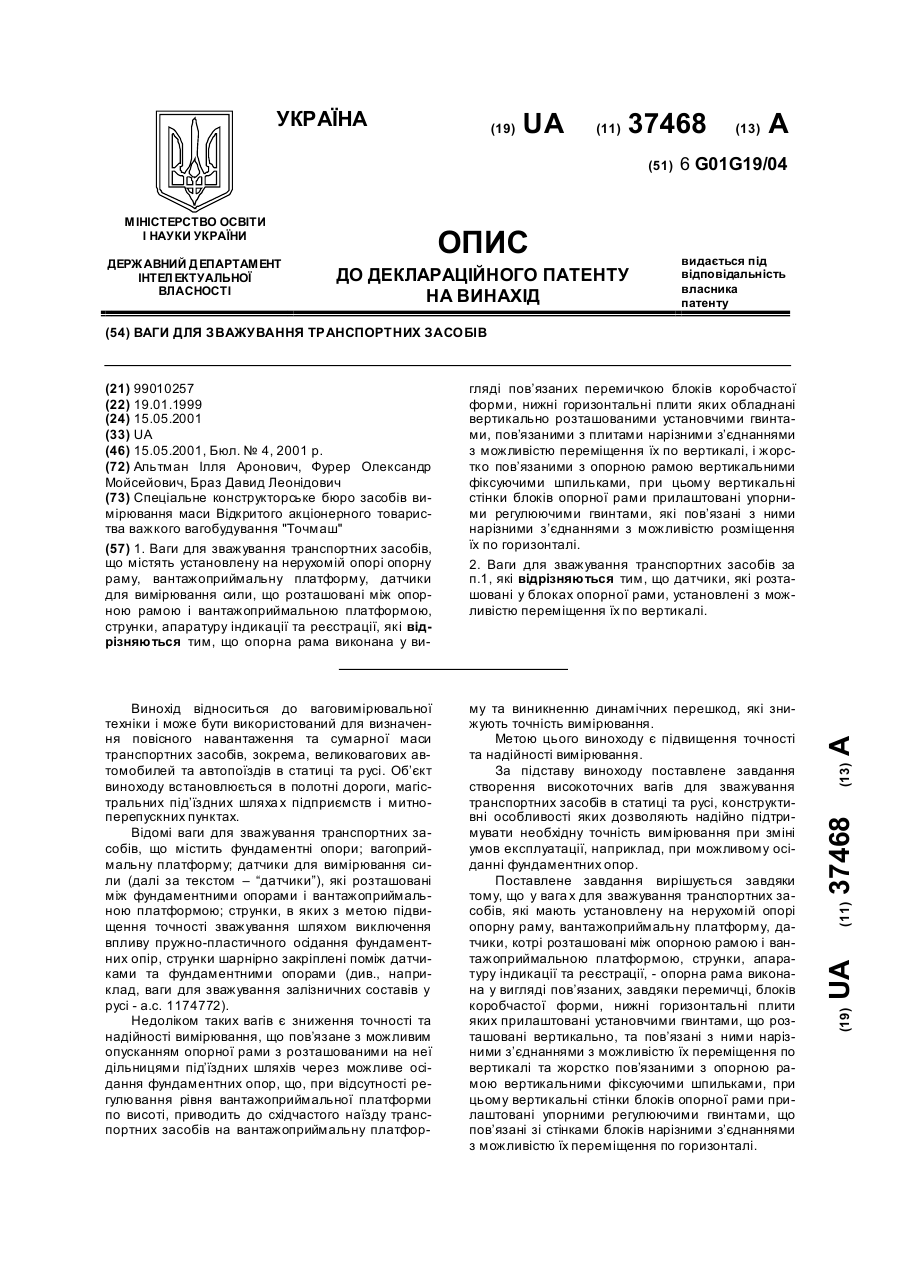
1. Ваги для зважування транспортних засобів, що містять установлену на нерухомій опорі опорну раму вантажоприймальну платформу, датчики для вимірювання сили, що розташовані між опорною рамою і вантажоприймальною платформою, струнки, апаратуру індикації та реєстрації, які відрізняються тим, що опорна рама виконана у вигляді пов'язаних перемичкою блоків коробчастої форми, нижні горизонтальні плити яких обладнані вертикально розташованими...
Попередній патент: Ящик універсальний
Наступний патент: Спосіб одержання залізоокисного пігменту
Випадковий патент: Стенд для випробування гідромашин