Перетворювач руху

Формула / Реферат
1. Перетворювач руху, що містить корпус, з'єднаний через перший підшипник з валом першого кривошипного механізму, який розташований всередині корпусу і кривошип якого з'єднаний через другий підшипник з валом сателітної шестірні, яка кінематично з'єднана з шестірнею внутрішнього зачеплення, яка з'єднана з корпусом, перший кривошипний механізм виконаний з можливістю з'єднання з вхідним або вихідним механічним приводом, який відрізняється тим, що осі обертання сателітної шестірні і шестірні внутрішнього зачеплення перетинаються під кутом до 50 градусів і є конічними, вал сателітної шестірні виконаний як вал другого кривошипного механізму, кривошип якого з'єднаний через третій підшипник з кінцевим валом, виконаним з можливістю з'єднання з механічним приводом.
2. Перетворювач руху за п. 1, який відрізняється тим, що вісь кінцевого вала розташована відносно вала другого кривошипного механізму під кутом до 50 градусів, а вісь вала другого кривошипного механізму розташована під кутом до осі вала першого кривошипного механізму.
Текст
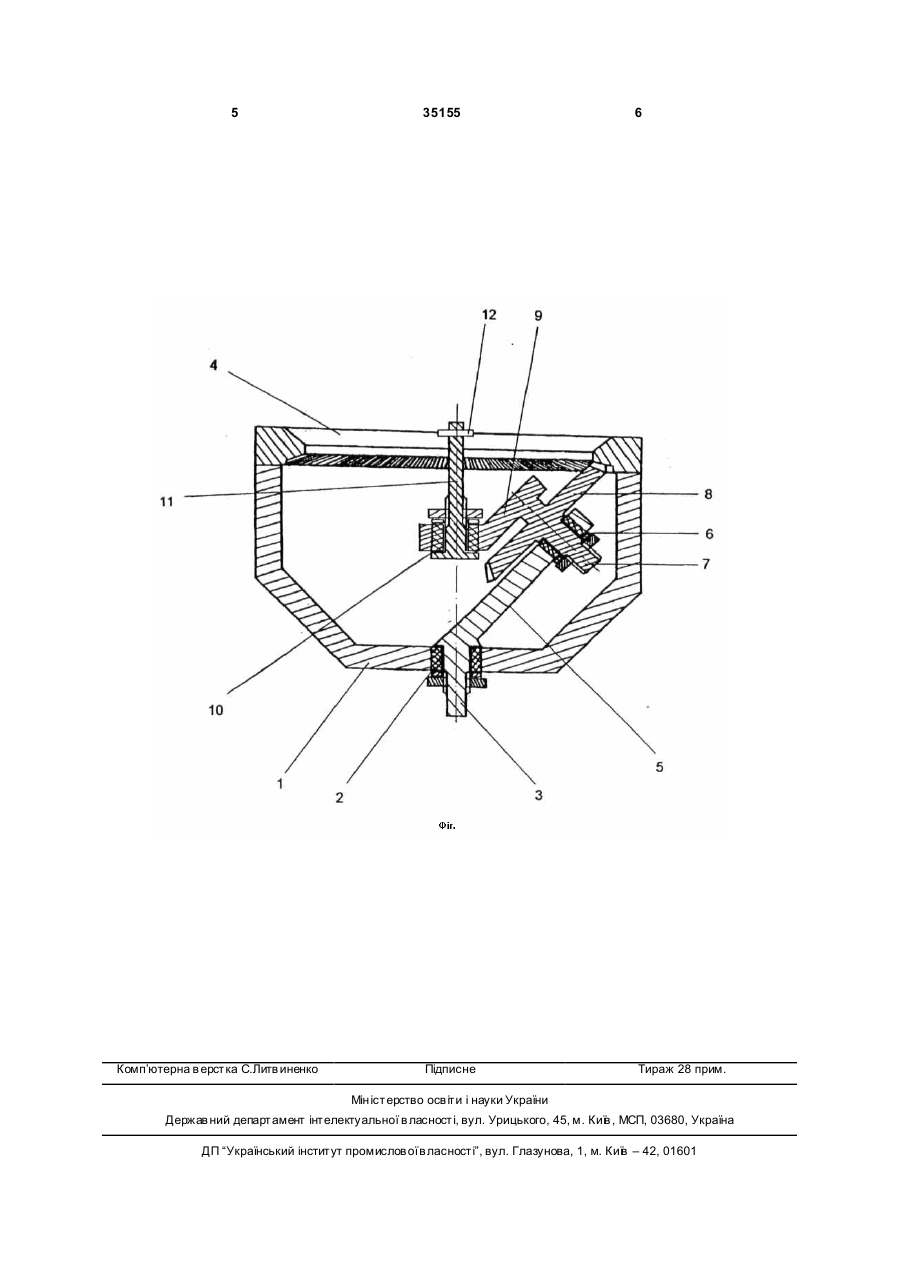
1. Перетворювач руху, що містить корпус, з'єднаний через перший підшипник з валом першого кривошипного механізму, який розташований всередині корпусу і кривошип якого з'єднаний через другий підшипник з валом сателітної шестірні, яка кінематично з'єднана з шестірнею внутрішнього зачеплення, яка з'єднана з корпусом, перший кривошипний механізм виконаний з можливістю з'єднання з вхідним або вихідним механічним при 3 35155 зв’язаний через другий підшипник з валом сателітної шестірні. Сателітна шестірня кінематично зв’язана з шестірнею внутрішнього зачеплення, яка зв’язана з корпусом. Кривошипний механізм і сателітна шестірня виконані з можливістю зв'язку з вхідним або вихідним механічним приводом. При використанні перетворювача руху за прототипом можливості перетворення руху за різними напрямками є недостатніми. В основу корисної моделі поставлено задачу вдосконалення перетворювача руху з можливістю перетворення коливального руху в обертання вала і навпаки, в якому шля хом конструктивних змін збільшують можливості перетворення руху за різними напрямками і за рахунок цього розширюють область застосування перетворювача руху. Ця задача вирішується тим, що в перетворювачі руху, який містить корпус, зв'язаний через перший підшипник з валом першого кривошипного механізму, який розташований всередині корпусу і кривошип якого зв'язаний через другий підшипник з валом сателітної шестірні, яка кінематично зв'язана з шестірнею внутрішнього зачеплення, яка зв'язана з корпусом, перший кривошипний механізм і сателітна шестірня виконані з можливістю зв'язку з вхідним або вихідним механічним приводом, згідно з винаходом вісі обертання сателітної шестірні і шестірні внутрішнього зачеплення перетинаються під кутом від нуля до п’ятидесяти градусів і є конічними, вал сателітної шестірні виконаний як вал другого кривошипного механізму, кривошип якого зв'язаний через третій підшипник з кінцевим валом, виконаним з можливістю зв'язку з механічним приводом. Крім того, вісь кінцевого вала розташована відносно вала другого кривошипного механізму під кутом від нуля до п’ятидесяти градусів, а вісь вала другого кривошипного механізма розташована під кутом к вісі вала першого кривошипного механізму. Сукупність основних ознак перетворювача руху забезпечує збільшення можливостей перетворення руху за різними напрямками, а саме можливостей відслідкування руху механічного приводу під різними кутами до кінцевого вала, який може одночасно обертатись і змінювати положення вісі обертання. 4 На Фіг. зображено схематично розріз перетворювача руху. Циліндроподібний корпус 1 зв'язаний через перший підшипник 2 з валом 3 першого кривошипного механізму. Верхня частина корпусу 1 жорстко зв'язана з шестірнею 4 внутрішнього зачеплення. Вал 3 зв'язаний з кривошипом 5 кривошипного механізму. Кривошип 5 зв'язаний з другим підшипником 6, який зв'язаний з валом 7 другого кривошипного механізму з сателітною шестірнею 8 і кривошипом 9. Край кривошипа 9 зв'язаний через третій підшипник 10 з кінцевим валом 11, виконаним з можливістю зв'язку з механічним приводом через палець 12. Передаточне відношення шестірні 4 до шестірні 8, u=2. Вісь вала 7 розташована відносно вісі вала 3 під кутом від нуля до п’ятидесяти градусів. Вісь вала 11 розташована відносно вісі вала 7 під кутом від нуля до п’ятидесяти градусів. Перетворювач руху працює таким чином. У варіанті перетворення обертального руху в коливальний, обертають вал 3.Через підшипник 2,кривошип 5, підшипник 6 прикладена сила рухає вал 7. При цьому шестірня 8 здійснює упор через зубчате зачеплення з шестірнею 4 обертаючи вал 7 з кривошипом 9, кривошип 9 через підшипник 10 буде руха ти кінцевий вал 11, при цьому кінцевий вал буде р ухатись радіально навколо вісі пальця 12. При положенні коли вісі вала 3 та вала 11 утворять максимальний кут, р ух кінцевого вала зміниться на протилежний, таким чином кінцевий вал 11 буде руха тись коливально навколо вісі пальця 12. У варіанті перетворення коливального руху в обертання вала, до кінцевого вала 11 прикладають силу під кутом до його вісі, як рахунок вал 11 здійснює коливальний рух. Через підшипник 10, кривошип 9, підшипник 6 прикладена сила рухає кривошип 5. При цьому шестірня 8 здійснює упор через зубчате зачеплення з шестірнею 4, а вал 3 здійснює обертовий рух навколо своєї вісі в підшипнику 2. При положенні коли вісі вала 3 та вала 11 утворять максимальний кут, треба змінювати напрямок прикладання сили на протилежний. 5 Комп’ютерна в ерстка C.Литв иненко 351556 Підписне Тираж 28 прим. Міністерство осв іт и і науки України Держав ний департамент інтелектуальної в ласності, вул. Урицького, 45, м. Київ , МСП, 03680, Україна ДП “Український інститут промислов ої в ласності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюMotion converter
Автори англійськоюMartynov Mykhailo Dmytrovych
Назва патенту російськоюПреобразователь движения
Автори російськоюМартынов Михаил Дмитриевич
МПК / Мітки
МПК: F16H 19/00, F16H 21/00
Мітки: перетворювач, руху
Код посилання
<a href="https://ua.patents.su/3-35155-peretvoryuvach-rukhu.html" target="_blank" rel="follow" title="База патентів України">Перетворювач руху</a>
Механізм для перетворення зворотно-поступального руху в обертальний і навпаки
Номер патенту: 3457
Опубліковано: 15.11.2004
Автор: Мущинський Анатолій Климович
МПК: F16H 21/16
Мітки: руху, зворотно-поступального, перетворення, обертальний, механізм, навпаки
Формула / Реферат:
1. Механізм для перетворення зворотно-поступального руху в обертальний і навпаки, що складається з поршня, шатуна і колінчастого вала, який відрізняється тим, що кривошип виконаний у вигляді планетарної передачі, яка складається з епіциклічної еліпсоїдної і внутрішньої шестерень із шевронними зубами, що знаходяться в постійному зачепленні.2. Механізм за п. 1, який відрізняється тим, що колінчастий вал виконаний простим і прямим,...
Електромагнітний перетворювач поступального руху магнітного елемента в обертальний рух вала
Номер патенту: 67019
Опубліковано: 15.06.2004
Автор: Сливка Юрій Іванович
МПК: H02K 7/06
Мітки: перетворювач, вала, магнітного, обертальний, елемента, електромагнітний, рух, поступального, руху
Формула / Реферат:
1. Електромагнітний перетворювач поступального руху в обертальний, що містить магнітні котушки, обмотані ізольованим провідником, у центральній частині яких є канал, де з можливістю поступального руху встановлені рухомі магнітні елементи, який відрізняється тим, що перетворювач виконаний у формі тора з рівномірно розташованими по окружності магнітними котушками, усередині яких рухомі магнітні елементи з'єднані послідовно міцним немагнітним...
Зубчато-важільний механізм коливального руху
Номер патенту: 32109
Опубліковано: 12.05.2008
Автори: Амбарцумянц Роберт Вачаганович, Тутаєв Сергій Валерійович
МПК: F16H 29/00
Мітки: коливального, механізм, зубчато-важільний, руху
Формула / Реферат:
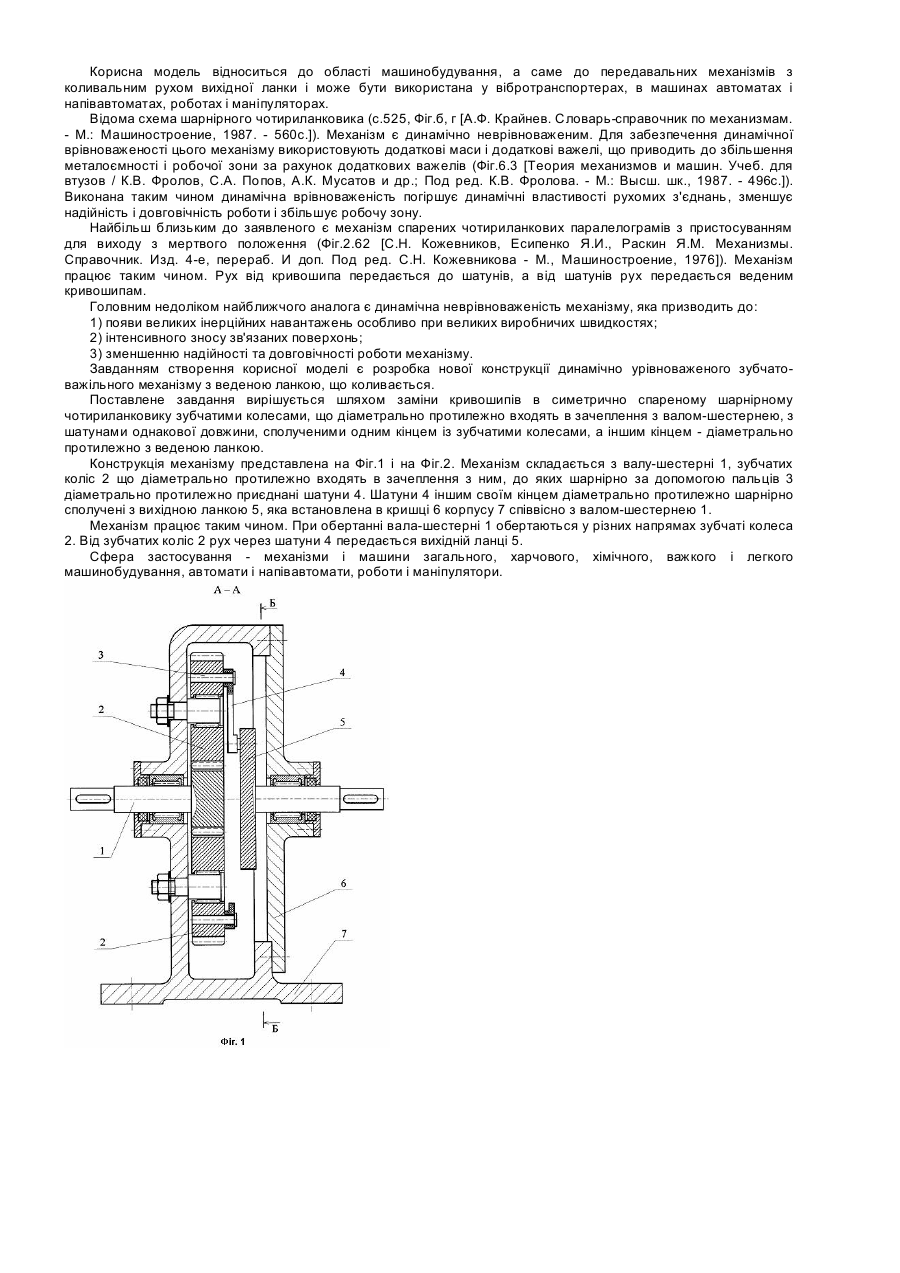
Зубчато-важільний механізм коливального руху, що містить кривошипи, шатуни, вихідну ланку, який відрізняється тим, що кривошипами є зубчаті колеса, діаметрально протилежно зачеплені з ведучим кривошипом, виконаним у вигляді вала-шестірні, шатунами однакової довжини, одним кінцем діаметрально протилежно рухомо з'єднаними із зубчатими колесами, а іншим кінцем діаметрально протилежно рухомо з'єднаними з веденою ланкою, яка встановлена співвісно...
Електромагнітний перетворювач поворотно-поступального руху в обертальний
Номер патенту: 55772
Опубліковано: 15.04.2003
Автор: Сливка Юрій Іванович
МПК: H02K 7/00
Мітки: електромагнітний, поворотно-поступального, обертальний, перетворювач, руху
Формула / Реферат:
Електромагнітний перетворювач поворотно-поступального руху в обертальний, який містить одну чи декілька магнітних котушок, який відрізняється тим, що корпус перетворювача виконаний за типом двигуна внутрішнього згорання, який містить один чи декілька циліндрів, усередині яких розташовуються магнітні котушки, з поршнем усередині, кінець якого з'єднано за допомогою шатуна з колінвалом з можливістю переміщення.
Лебідка
Номер патенту: 2336
Опубліковано: 16.02.2004
Автори: Цейтін Леонід Ісаакович, Ковальов Вячеслав Володимирович, Яшаров Павло Олександрович
МПК: B66D 1/00
Мітки: лебідка
Формула / Реферат:
1. Лебідка, що містить двигун і редуктор із швидкохідною шестірнею, яка відрізняється тим, що редуктор обладнаний швидкохідним валом, з'єднаним з валом двигуна за допомогою зубчастої муфти, при цьому швидкохідна шестірня розташована між опорами швидкохідного вала.2. Лебідка за п. 1, яка відрізняється тим, що швидкохідні вал та шестірня виконані у вигляді вала-шестірні.
Попередній патент: Елемент арматури, що напружується, для постнапруженого бетону
Наступний патент: Спосіб лікування остеоартрозу
Випадковий патент: Лінія виробництва бурякового соку