Поворотний цифровий привід
Номер патенту: 35492
Опубліковано: 25.09.2008

Формула / Реферат
1. Поворотний цифровий привід, що містить вал, на якому послідовно розміщено розрядні секції і секцію зворотного повороту з робочими камерами і каналами живлення, який відрізняється тим, що розрядні секції виконані у вигляді циліндрів однобічної дії з цифровим кроком, поршні яких з'єднані з зубчастими рейками, які зчіплюються з шестернями, послідовно розміщеними з можливістю повороту на валу.
2. Поворотний цифровий привід за п. 1, який відрізняється тим, що циліндр секції першого розряду прикріплений нерухомо до опори, а циліндри старших розрядів закріплені на шестернях молодших розрядів.
3. Поворотний цифровий привід за п. 1, який відрізняється тим, що шестірня циліндра старшого розряду з'єднана з вихідним фланцем і з верхнім кінцем поворотного вала, нижній кінець якого з'єднаний з шестірнею циліндра зворотного повороту, який прикріплений нерухомо до опори.
4. Поворотний цифровий привід за п. 1, який відрізняється тим, що в зубчастих рейках розрядних циліндрів виконані поздовжні пази, в яких розміщені закріплені в діаметральних наскрізних пазах циліндрів обмежувачі переміщень поршнів і осьові різьби, в які вгвинчені гвинти з можливістю регулювання величин переміщення поршнів.
Текст
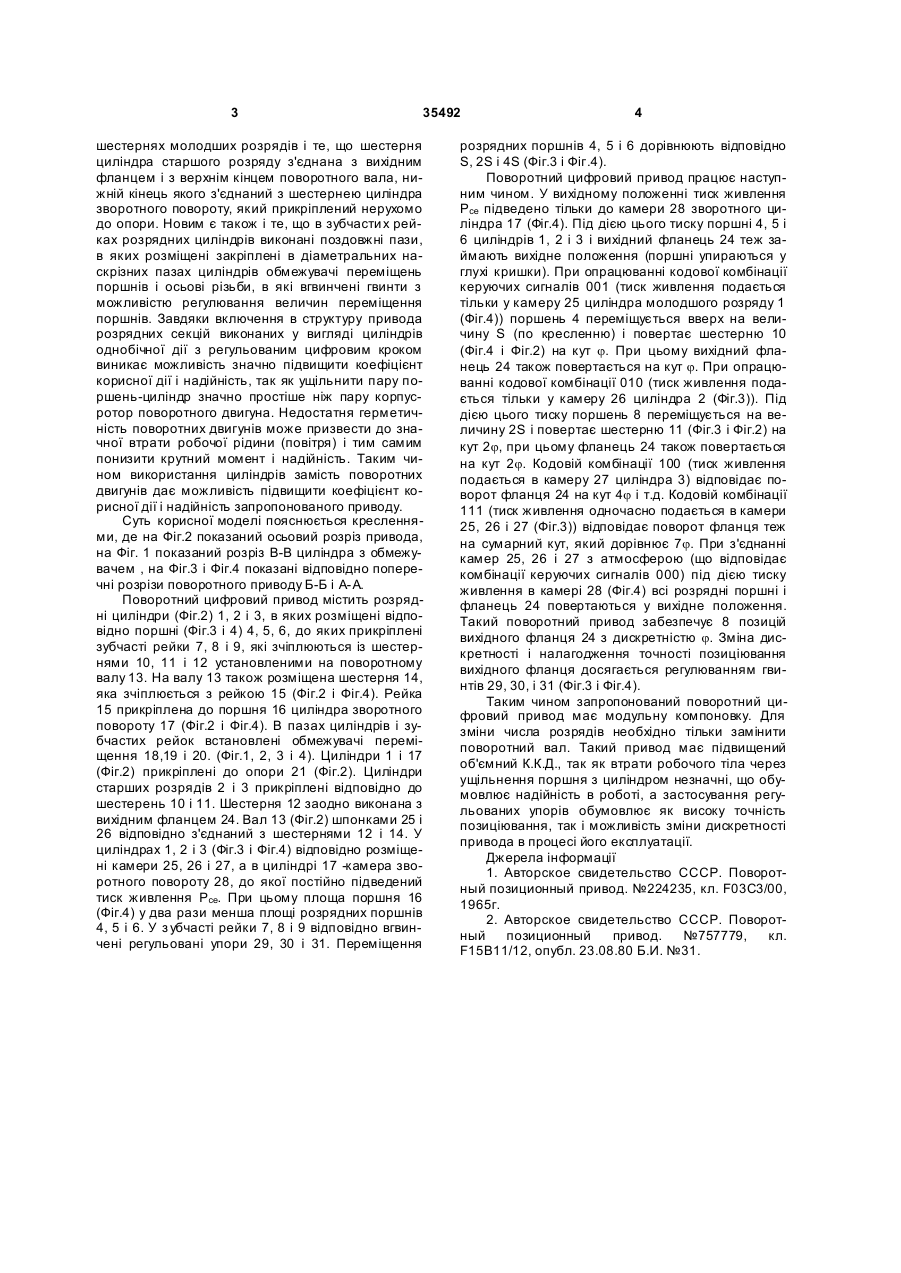
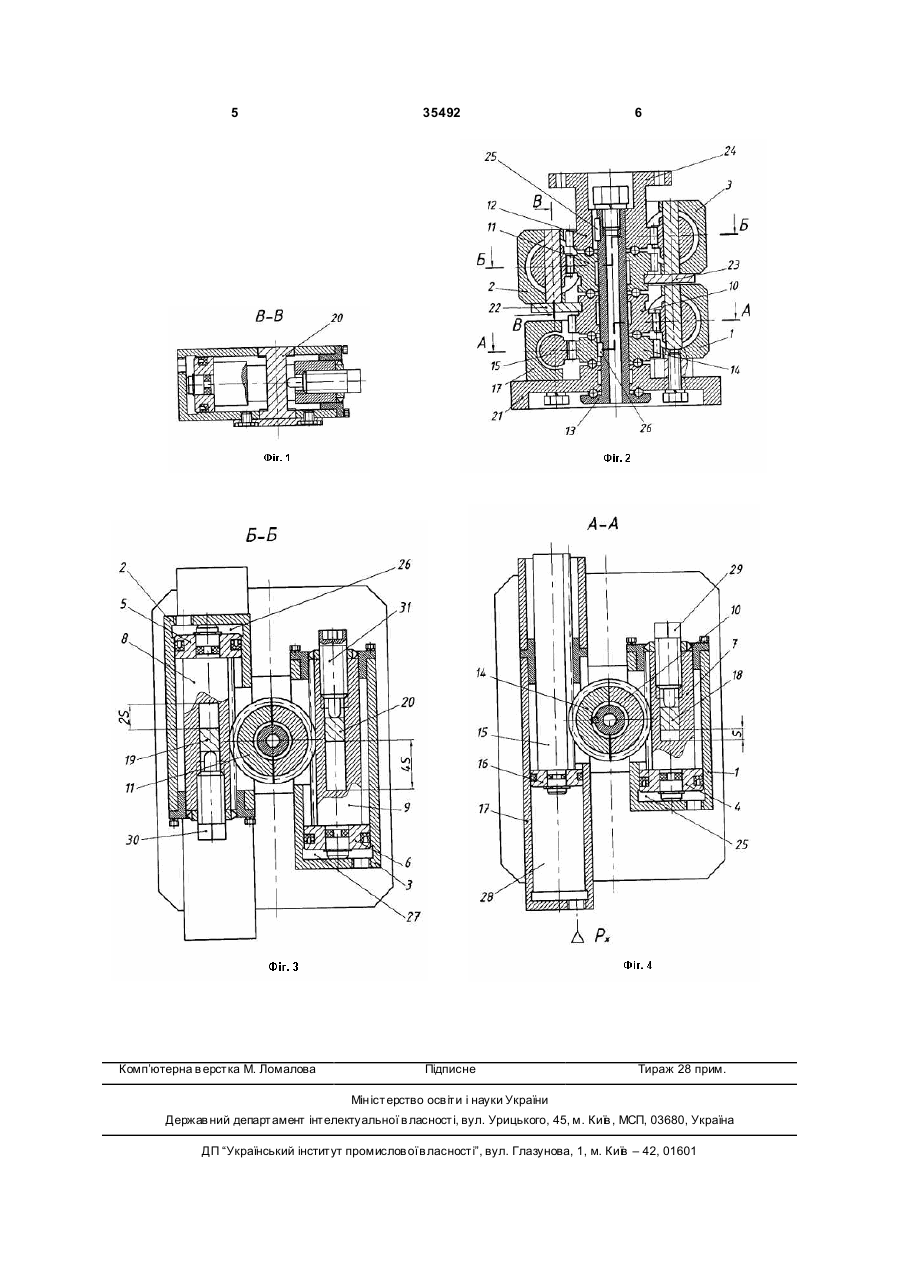
1. Поворотний цифровий привід, що містить вал, на якому послідовно розміщено розрядні секції і секцію зворотного повороту з робочими камерами і каналами живлення, який відрізняється тим, що розрядні секції виконані у вигляді циліндрів однобічної дії з цифровим кроком, поршні яких з'єднані з зубчастими рейками, які зчіплюються з шестернями, послідовно розміщеними з можливістю повороту на валу. 3 35492 шестернях молодших розрядів і те, що шестерня циліндра старшого розряду з'єднана з вихідним фланцем і з верхнім кінцем поворотного вала, нижній кінець якого з'єднаний з шестернею циліндра зворотного повороту, який прикріплений нерухомо до опори. Новим є також і те, що в зубчасти х рейках розрядних циліндрів виконані поздовжні пази, в яких розміщені закріплені в діаметральних наскрізних пазах циліндрів обмежувачі переміщень поршнів і осьові різьби, в які вгвинчені гвинти з можливістю регулювання величин переміщення поршнів. Завдяки включення в структуру привода розрядних секцій виконаних у вигляді циліндрів однобічної дії з регульованим цифровим кроком виникає можливість значно підвищити коефіцієнт корисної дії і надійність, так як ущільнити пару поршень-циліндр значно простіше ніж пару корпусротор поворотного двигуна. Недостатня герметичність поворотних двигунів може призвести до значної втрати робочої рідини (повітря) і тим самим понизити крутний момент і надійність. Таким чином використання циліндрів замість поворотних двигунів дає можливість підвищити коефіцієнт корисної дії і надійність запропонованого приводу. Суть корисної моделі пояснюється кресленнями, де на Фіг.2 показаний осьовий розріз привода, на Фіг. 1 показаний розріз В-В циліндра з обмежувачем , на Фіг.3 і Фіг.4 показані відповідно поперечні розрізи поворотного приводу Б-Б і А-А. Поворотний цифровий привод містить розрядні циліндри (Фіг.2) 1, 2 і 3, в яких розміщені відповідно поршні (Фіг.3 і 4) 4, 5, 6, до яких прикріплені зубчасті рейки 7, 8 і 9, які зчіплюються із шестернями 10, 11 і 12 установленими на поворотному валу 13. На валу 13 також розміщена шестерня 14, яка зчіплюється з рейкою 15 (Фіг.2 і Фіг.4). Рейка 15 прикріплена до поршня 16 циліндра зворотного повороту 17 (Фіг.2 і Фіг.4). В пазах циліндрів і зубчастих рейок встановлені обмежувачі переміщення 18,19 і 20. (Фіг.1, 2, 3 і 4). Циліндри 1 і 17 (Фіг.2) прикріплені до опори 21 (Фіг.2). Циліндри старших розрядів 2 і 3 прикріплені відповідно до шестерень 10 і 11. Шестерня 12 заодно виконана з вихідним фланцем 24. Вал 13 (Фіг.2) шпонками 25 і 26 відповідно з'єднаний з шестернями 12 і 14. У циліндрах 1, 2 і 3 (Фіг.3 і Фіг.4) відповідно розміщені камери 25, 26 і 27, а в циліндрі 17 -камера зворотного повороту 28, до якої постійно підведений тиск живлення Рсе. При цьому площа поршня 16 (Фіг.4) у два рази менша площі розрядних поршнів 4, 5 і 6. У з убчасті рейки 7, 8 і 9 відповідно вгвинчені регульовані упори 29, 30 і 31. Переміщення 4 розрядних поршнів 4, 5 і 6 дорівнюють відповідно S, 2S і 4S (Фіг.3 і Фіг.4). Поворотний цифровий привод працює наступним чином. У вихідному положенні тиск живлення Рсе підведено тільки до камери 28 зворотного циліндра 17 (Фіг.4). Під дією цього тиску поршні 4, 5 і 6 циліндрів 1, 2 і 3 і вихідний фланець 24 теж займають вихідне положення (поршні упираються у глухі кришки). При опрацюванні кодової комбінації керуючих сигналів 001 (тиск живлення подається тільки у камеру 25 циліндра молодшого розряду 1 (Фіг.4)) поршень 4 переміщується вверх на величину S (по кресленню) і повертає шестерню 10 (Фіг.4 і Фіг.2) на кут j. При цьому вихідний фланець 24 також повертається на кут j. При опрацюванні кодової комбінації 010 (тиск живлення подається тільки у камеру 26 циліндра 2 (Фіг.3)). Під дією цього тиску поршень 8 переміщується на величину 2S і повертає шестерню 11 (Фіг.3 і Фіг.2) на кут 2j, при цьому фланець 24 також повертається на кут 2j. Кодовій комбінації 100 (тиск живлення подається в камеру 27 циліндра 3) відповідає поворот фланця 24 на кут 4j і т.д. Кодовій комбінації 111 (тиск живлення одночасно подається в камери 25, 26 і 27 (Фіг.3)) відповідає поворот фланця теж на сумарний кут, який дорівнює 7j. При з'єднанні камер 25, 26 і 27 з атмосферою (що відповідає комбінації керуючих сигналів 000) під дією тиску живлення в камері 28 (Фіг.4) всі розрядні поршні і фланець 24 повертаються у вихідне положення. Такий поворотний привод забезпечує 8 позицій вихідного фланця 24 з дискретністю j. Зміна дискретності і налагодження точності позиціювання вихідного фланця досягається регулюванням гвинтів 29, 30, і 31 (Фіг.3 і Фіг.4). Таким чином запропонований поворотний цифровий привод має модульну компоновку. Для зміни числа розрядів необхідно тільки замінити поворотний вал. Такий привод має підвищений об'ємний К.К.Д., так як втрати робочого тіла через ущільнення поршня з циліндром незначні, що обумовлює надійність в роботі, а застосування регульованих упорів обумовлює як високу точність позиціювання, так і можливість зміни дискретності привода в процесі його експлуатації. Джерела інформації 1. Авторское свидетельство СССР. Поворотный позиционный привод. №224235, кл. F03С3/00, 1965г. 2. Авторское свидетельство СССР. Поворотный позиционный привод. №757779, кл. F15В11/12, опубл. 23.08.80 Б.И. №31. 5 Комп’ютерна в ерстка М. Ломалова 35492 6 Підписне Тираж 28 прим. Міністерство осв іт и і науки України Держав ний департамент інтелектуальної в ласності, вул. Урицького, 45, м. Київ , МСП, 03680, Україна ДП “Український інститут промислов ої в ласності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюRotary digital rdive
Автори англійськоюNovik Mykola Andriiovych, Kucheruk Yurii Mykolaiovych
Назва патенту російськоюПоворотный цифровой привод
Автори російськоюНовик Николай Андреевич, Кучерук Юрий Николаевич
МПК / Мітки
МПК: F15B 11/00
Мітки: цифровий, поворотний, привід
Код посилання
<a href="https://ua.patents.su/3-35492-povorotnijj-cifrovijj-privid.html" target="_blank" rel="follow" title="База патентів України">Поворотний цифровий привід</a>
Поворотний цифровий привід

Номер патенту: 34408
Опубліковано: 11.08.2008
Автори: Новік Микола Андрійович, Кучерук Юрій Миколайович
МПК: F15B 7/00
Мітки: привід, поворотний, цифровий
Формула / Реферат:
1. Поворотний цифровий привід, що містить нерухомий вал з каналами живлення, на якому послідовно розміщені з обмежувачами відносного повороту розрядні секції, в циліндричних розточках яких між кришками розміщені роздільники і закріплені на валах пластини з утворенням розрядних робочих камер, і секцію зворотного повороту, вал якої прикріплений до нерухомого вала, а корпус секції жорстко з'єднаний з валом розрядної секції старшого розряду і з...
Багатопозиційний поворотний привід з цифровим керуванням
Номер патенту: 35218
Опубліковано: 10.09.2008
Автори: Новік Микола Андрійович, Кучерук Юрій Миколайович
МПК: F15B 7/00
Мітки: керуванням, багатопозиційний, поворотний, привід, цифровим
Формула / Реферат:
1. Багатопозиційний поворотний привід з цифровим керуванням, що містить циліндри повороту і зворотного повороту, поршні яких утворюють робочі камери і з'єднані із зубчастими рейками, що зчіплюються із вихідною шестірнею, гідравлічні дозатори, з розміщеними в них поршнями з утворенням робочих і гідравлічних камер, який відрізняється тим, що гідравлічні камери дозаторів сполучені з вхідними каналами зворотного клапана з дроселем, вихідні канали...
Двовідліковий аналого-цифровий привід керування кутом повороту антени рлс
Номер патенту: 28552
Опубліковано: 10.12.2007
Автор: Ніколенко Сергій Іванович
МПК: G08C 19/00
Мітки: повороту, керування, рлс, привід, аналого-цифровий, антени, двовідліковий, кутом
Формула / Реферат:
Двовідліковий аналого-цифровий привід керування кутом повороту антени PЛC, що містить електронний сельсин-датчик, вхід якого підключений до входу сельсина-приймача, його вхідна вісь з'єднана з однією вхідною віссю редуктора, а вихід сельсина-приймача з'єднаний з одним із входів підсилювача, вихід підсилювача підключений до входу двигуна, вихідна вісь двигуна підключена до іншої вхідної осі редуктора, вихідна вісь якого з'єднана з віссю...
Поворотний гідродвигун “гідравлічне коромисло”
Номер патенту: 5370
Опубліковано: 15.03.2005
Автор: Кононенко Володимир Іванович
МПК: F16H 43/00
Мітки: коромисло, гідродвигун, гідравлічне, поворотний
Формула / Реферат:
Поворотний вітродвигун, який містить два циліндри, гідросистему, розподілювач тиску, насос, електродвигун, бак, який відрізняється тим, що штоки двох циліндрів закріплені сумісно у вузлі, що розташований на кінці важеля, який другим кінцем закріплений на осі передачі потужності.
Цифровий гідравлічний привод
Номер патенту: 32252
Опубліковано: 12.05.2008
Автор: Новік Микола Андрійович
МПК: F15B 11/00
Мітки: гідравлічний, цифровий, привод
Формула / Реферат:
Цифровий гідравлічний привод, що містить гідроциліндр з робочими камерами, вихідний шток якого з’єднаний з розмикачем датчика зворотного зв’язку, цифровий гідродвигун внутрішньокрокового поділу, шток якого з’єднаний з корпусом датчика зворотного зв’язку, керуючі гідророзподільники, електричний дешифратор і програмний блок, який відрізняється тим, що датчик зворотного зв’язку виконаний у вигляді розміщених в корпусі з рівномірним кроком...
Попередній патент: Фасонний різець
Наступний патент: Вітроенергоагрегат
Випадковий патент: Пристрій для підводного циклічного витягнення хребта