Спосіб гасіння кутових швидкостей вісесиметричного космічного літального апарата
Номер патенту: 36543
Опубліковано: 27.10.2008
Автори: Бандура Іван Миколайович, Нарожний Віталій Васильович, Грабар Михайло Сергійович, Бичок Олексій Сергійович, Амелін Сергій Вікторович
Формула / Реферат
Спосіб гасіння кутових швидкостей вісесиметричного космічного літального апарата, який полягає в тому, що вимірюють кутові швидкості навколо трьох осей зв`язаної системи координат апарата, включають керуючі реактивні двигуни, при малих значеннях подовжньої кутової швидкості збільшують її шляхом включення керуючих двигунів в подовжньому каналі, забезпечують паузу без керування, гасять подовжню кутову швидкість, потім забезпечують гасіння поперечних кутових швидкостей, який відрізняється тим, що після вимірювання початкових кутових швидкостей послідовно тестують перший та другий поперечні канали керування виконавчими органами, визначають необхідні поперечні осі, де в каналах керування виконавчими органами відсутні несправності типу "невключення", після забезпечення паузи без керування визначають момент початку гасіння подовжньої кутової швидкості за умови збігу напрямку вектора поперечної кутової швидкості з напрямом необхідної поперечної осі.
Текст
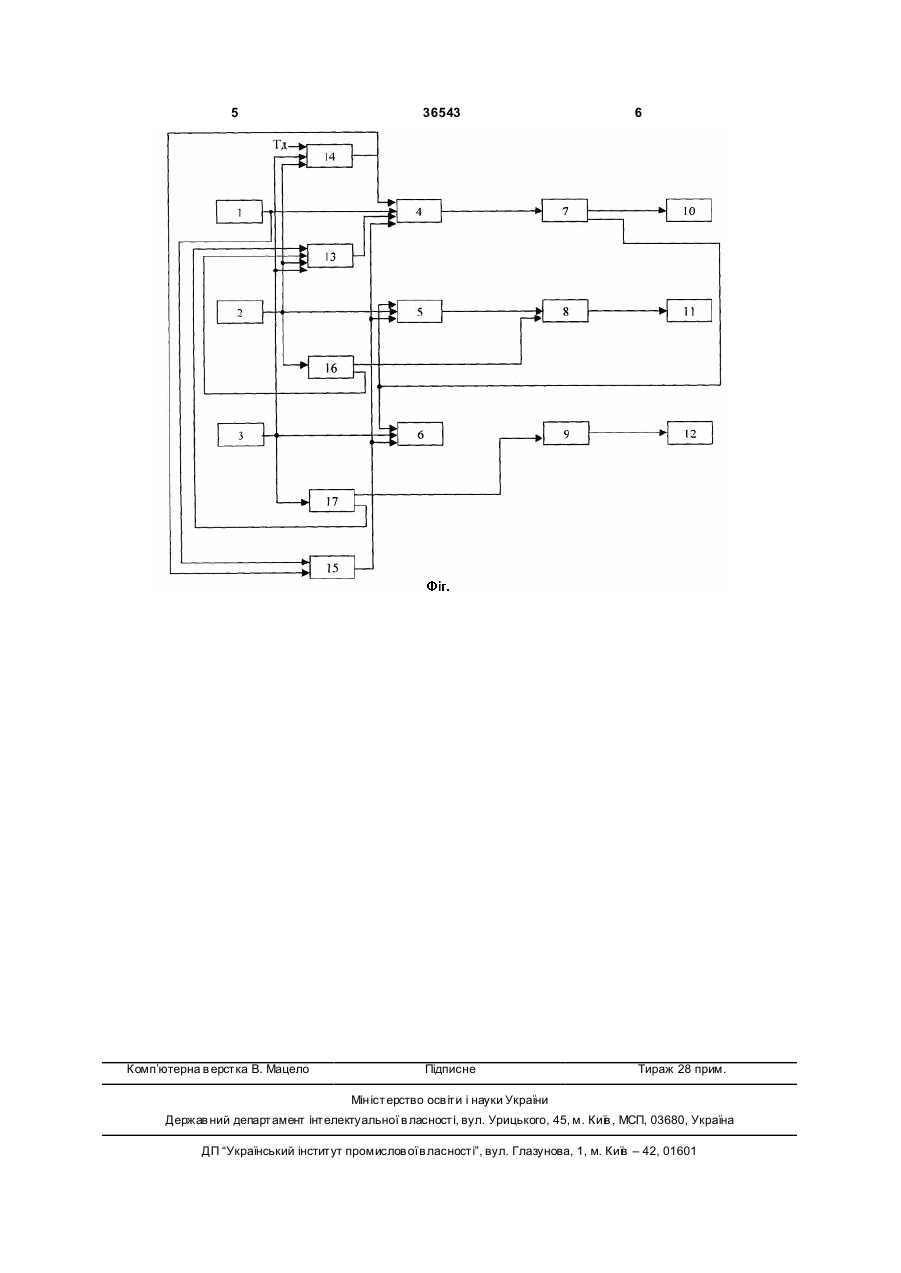
Спосіб гасіння кутових швидкостей вісесиметричного космічного літального апарата, який полягає в тому, що вимірюють кутові швидкості навколо трьох осей зв`язаної системи координат апарата, включають керуючі реактивні двигуни, при малих 3 36543 4 вання початкових кутових швидкостей послідовно гативної полярності та аналізує відповідність зміни тестують перший та другий поперечні канали кепершої кутової швидкості цим сигналам. Якщо при рування виконавчими органами, визначають необподачі керуючого сигнала кутова швидкість не зміхідні поперечні осі, де в каналах керування виконюється, то це свідчить про наявність несправноснавчими органами відсутні несправності типу ті каналу типа «невключення». При цьому блок 16 «невключення», після забезпечення паузи без кевидає на третій вхід блоку 13 відповідний сигнал. рування визначають момент початку гасіння поПотім аналогічно проводять тестування другого довжньої кутової швидкості за умови збігу напрямпоперечного каналу за допомогою блоку тестуванку вектора поперечної кутової швидкості з ня 17, який при наявності несправності видає віднапрямом необхідної поперечної осі. повідний сигнал на четвертий вхід блоку 13. на На Фіг. представлена структурна схема систеоснові цієї інформації з блоків 16 та 17 блок 13 ми, яка реалізує спосіб гасіння кутових швидкофіксує необхідну поперечну вісь, де немає нестей космічного літального апарата. справності. При цьому із чотирьох напрямків осей Система містить датчик подовжньої кутової Y, +Y, -Z і +Z, достатньо навіть одної осі, де немає швидкості 1, датчик першої поперечної кутової несправності, для рішення задачі гасіння. У блоці швидкості 2, датчик другої поперечної кутової 13 визначаються необхідні значення поперечних швидкості 3, блок 4 підключення датчика 1, блок 5 кутови х швидкостей, при яких необхідно починати підключення датчика 2, блок 6 підключення датчигасіння подовжньої кутової швидкості, щоб забезка 3, блок 7 керування виконавчими органами попечити після гасіння подовжньої кутової швидкості довжнього каналу, блок 8 керування виконавчими збіг напрямку вектора поперечної кутової швидкоорганами першого поперечного каналу, блок 9 сті з напрямком однієї з поперечних осей Z чи Y. З керування виконавчими органами другого попеврахуванням цього витримують паузу без керуречного каналу, виконавчі органи подовжнього вання до моменту, поки обмірювані поперечні куканалу 10, виконавчі органи першого поперечного тові швидкості з датчиків 2, 3 не збіжаться з необканалу 11, виконавчі органи другого поперечного хідними, після чого блок 13 через блоки 4 і 7 каналу 12, блок 13 визначення початку гасіння включає виконавчі органи подовжнього каналу 10, подовжньої кутової швидкості, блок 14 визначення що потім виключаються блоком 7 після гасіння потрібної подовжньої кутової швидкості, блок 15 подовжньої кутової швидкості wх=0. У результаті мінімізації витрат робочого тіла, блок 16 тестуванподовжня й одна з поперечних кутових швидконя першого поперечного каналу керування викостей будуть дорівнювати нулю, а др уга поперечна навчими органами, блок 17 тестування другого швидкість буде дорівнювати r0. поперечного каналу керування виконавчими оргаПотім по інформації з другого виходу блока 7 нами. через блоки 5 і 8 включаються виконавчі органи Гасіння кутових швидкостей вісесиметричного 11, якщо напрямок вектора поперечної кутової космічного літального апарата проводять за допошвидкості збігається з віссю Y, і через блоки 6, 9 могою датчиків 1, 2, 3 виміряють три складові кувключаються виконавчі органи 12, якщо напрямок тової швидкості. Блоки керування 7, 8, 9 вироблявектора поперечної кутової швидкості збігається з ють керуючі сигнали на виконавчі органи 10, 11, віссю Z. Виконавчі органи 11 виключаються бло12. Одночасно складові поперечної кутової швидком 8 після гасіння поперечної кутової швидкості кості з датчиків 2, 3 надходять на входи блока виwY=0, а виконавчі органи 12 виключаються блоком значення початку гасіння кутових швидкостей 13, 9 після гасіння поперечної кутової швидкості wz=0. вихід якого підключений до другого входу блока В результаті поперечні кутові швидкості будуть підключення 4. Сигнал про момент закінчення гадорівнювати нулю. сіння подовжньої кутової швидкості з другого виТаким чином, запропонований спосіб дозволяє ходу блока 7 надходить на другі входи блоків підзабезпечити гасіння початкових кутови х швидкоключення 5, 6. стей космічного літального апарата навколо трьох Розглянемо процеси управління при гасінні осей за допомогою реактивних виконавчих органів подовжньої wх і поперечних кутових швидкостей. при несправності типу «невключення» в попереПісля вимірювання кутови х швидкостей, проводять чних каналах керування виконавчими органами, тестування першого поперечного каналу керуванпротягом заданого часу гасіння з мінімальною виня виконавчими органами за допомогою блоку тратою робочого тіла. тестування 16, який послідовно формує керуючі сигнали мінімальної тривалості, позитивної та не 5 Комп’ютерна в ерстка В. Мацело 36543 6 Підписне Тираж 28 прим. Міністерство осв іт и і науки України Держав ний департамент інтелектуальної в ласності, вул. Урицького, 45, м. Київ , МСП, 03680, Україна ДП “Український інститут промислов ої в ласності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod of axisymmetric spacecraft angular rate damping
Автори англійськоюBandura Ivan Mykolaiovych, Naroznnyi Vitaliy Vasyliovych, Amelin Serhii Viktorovych, Hrabar Mykhailo Serhiiovych, Bychok Oleksii Serhiiovych
Назва патенту російськоюСпособ гашения угловых скоростей осесимметричного космического летательного аппарата
Автори російськоюБандура Иван Николаевич, Нарожный Виталий Васильевич, Амелин Сергей Викторович, Грабар Михаил Сергеевич, Бычок Алексей Сергеевич
МПК / Мітки
МПК: B64G 1/24
Мітки: апарата, гасіння, вісесиметричного, космічного, спосіб, швидкостей, літального, кутових
Код посилання
<a href="https://ua.patents.su/3-36543-sposib-gasinnya-kutovikh-shvidkostejj-visesimetrichnogo-kosmichnogo-litalnogo-aparata.html" target="_blank" rel="follow" title="База патентів України">Спосіб гасіння кутових швидкостей вісесиметричного космічного літального апарата</a>
Спосіб гасіння початкових кутових швидкостей вісесиметричного космічного літального апарата
Номер патенту: 80583
Опубліковано: 10.10.2007
Автори: Чебераха Ольга Анатоліївна, Кулік Анатолій Степанович, Бандура Іван Миколайович
МПК: B64G 1/24
Мітки: літального, швидкостей, гасіння, космічного, кутових, вісесиметричного, початкових, апарата, спосіб
Формула / Реферат:
Спосіб гасіння початкових кутових швидкостей вісесиметричного космічного літального апарата, який полягає в тому, що вимірюють кутові швидкості навколо трьох осей зв'язаної системи координат апарата, включають керуючі реактивні двигуни, який відрізняється тим, що для гасіння складових кутової швидкості обертання навколо двох осей забезпечують паузу без керування, для гасіння подовжньої кутової швидкості й однієї з поперечних кутових...
Система гасіння початкових кутових швидкостей вісесиметричного космічного літального апарата
Номер патенту: 12002
Опубліковано: 16.01.2006
Автори: Бандура Іван Миколайович, Шапранов Ілля Володимирович
МПК: B64G 1/24
Мітки: космічного, система, апарата, кутових, літального, вісесиметричного, початкових, швидкостей, гасіння
Формула / Реферат:
Система гасіння початкових кутових швидкостей вісесиметричного космічного літального апарата, що містить датчик подовжньої кутової швидкості, датчики першої і другої поперечних кутових швидкостей, блок керування виконавчими органами подовжнього каналу, блоки керування виконавчими органами першого і другого поперечних каналів, виконавчі органи подовжнього, першого і другого поперечних каналів, входи яких з'єднані з виходами відповідних блоків...
Система демпфірування кутових швидкостей вісесиметричного космічного літального апарата
Номер патенту: 11855
Опубліковано: 16.01.2006
Автори: Бандура Іван Миколайович, Снагіцький Сергій Володимирович
МПК: B64G 1/24
Мітки: вісесиметричного, швидкостей, демпфірування, космічного, апарата, літального, кутових, система
Формула / Реферат:
Система демпфірування кутових швидкостей вісесиметричного космічного літального апарата, що містить датчик подовжньої кутової швидкості, датчики першої та другої поперечних кутових швидкостей, блок керування виконавчими органами подовжнього каналу, блоки керування виконавчими органами першого і другого поперечних каналів, виконавчі органи подовжнього, першого та другого поперечних каналів, входи яких з'єднані з виходами відповідних блоків...
Спосіб демпфірування кутових швидкостей вісесиметричного космічного літального апарата
Номер патенту: 11858
Опубліковано: 16.01.2006
Автори: Войченко Оксана Олександрівна, Бандура Іван Миколайович
МПК: B64G 1/24
Мітки: літального, апарата, вісесиметричного, кутових, спосіб, космічного, демпфірування, швидкостей
Формула / Реферат:
Спосіб демпфірування кутових швидкостей вісесиметричного космічного літального апарата, який полягає в тому, що вимірюють кутові швидкості навколо трьох осей зв'язаної системи координат апарата, включають керуючі реактивні двигуни, який відрізняється тим, що для демпфірування складових кутової швидкості обертання навколо трьох осей забезпечують паузу без керування, для демпфірування подовжньої кутової швидкості визначають момент початку...
Система демпфірування кутових швидкостей вісесиметричного космічного літального апарата
Номер патенту: 35086
Опубліковано: 26.08.2008
Автори: Субота Анатолій Максимович, Юрковець Ігор Валентинович, Бандура Іван Миколайович
МПК: B64G 1/24
Мітки: космічного, система, швидкостей, кутових, вісесиметричного, демпфірування, апарата, літального
Формула / Реферат:
Система демпфірування кутових швидкостей вісесиметричного космічного літального апарата, що містить датчик подовжньої кутової швидкості, датчики першої та другої поперечних кутових швидкостей, блок керування виконавчими органами подовжнього каналу, блоки керування виконавчими органами першого і другого поперечних каналів, виконавчі органи подовжнього, першого та другого поперечних каналів, між кожним датчиком і блоком керування органами...
Попередній патент: Швейна машина човникового стібка з комбінованим транспортуванням матеріалу
Наступний патент: Система відказостійкого гасіння кутових швидкостей вісесиметричного космічного літального апарата
Випадковий патент: Пристрій для контролю переміщень трубопроводів