Система демпфірування кутових швидкостей вісесиметричного космічного літального апарата
Номер патенту: 11855
Опубліковано: 16.01.2006
Автори: Бандура Іван Миколайович, Снагіцький Сергій Володимирович
Формула / Реферат
Система демпфірування кутових швидкостей вісесиметричного космічного літального апарата, що містить датчик подовжньої кутової швидкості, датчики першої та другої поперечних кутових швидкостей, блок керування виконавчими органами подовжнього каналу, блоки керування виконавчими органами першого і другого поперечних каналів, виконавчі органи подовжнього, першого та другого поперечних каналів, входи яких з'єднані з виходами відповідних блоків керування, яка відрізняється тим, що між кожним датчиком і блоком керування виконавчими органами введено блок підключення відповідного датчика, введено блок визначення початку демпфірування подовжньої швидкості, перший вхід якого з'єднаний з виходом датчика першої поперечної кутової швидкості, другий вхід - з виходом датчика другої поперечної кутової швидкості, а вихід - з другим входом блока підключення датчика подовжньої кутової швидкості, другий вихід блока керування виконавчими органами подовжнього каналу з'єднаний з другими входами блоків підключення датчиків першої і другої поперечних кутових швидкостей.
Текст
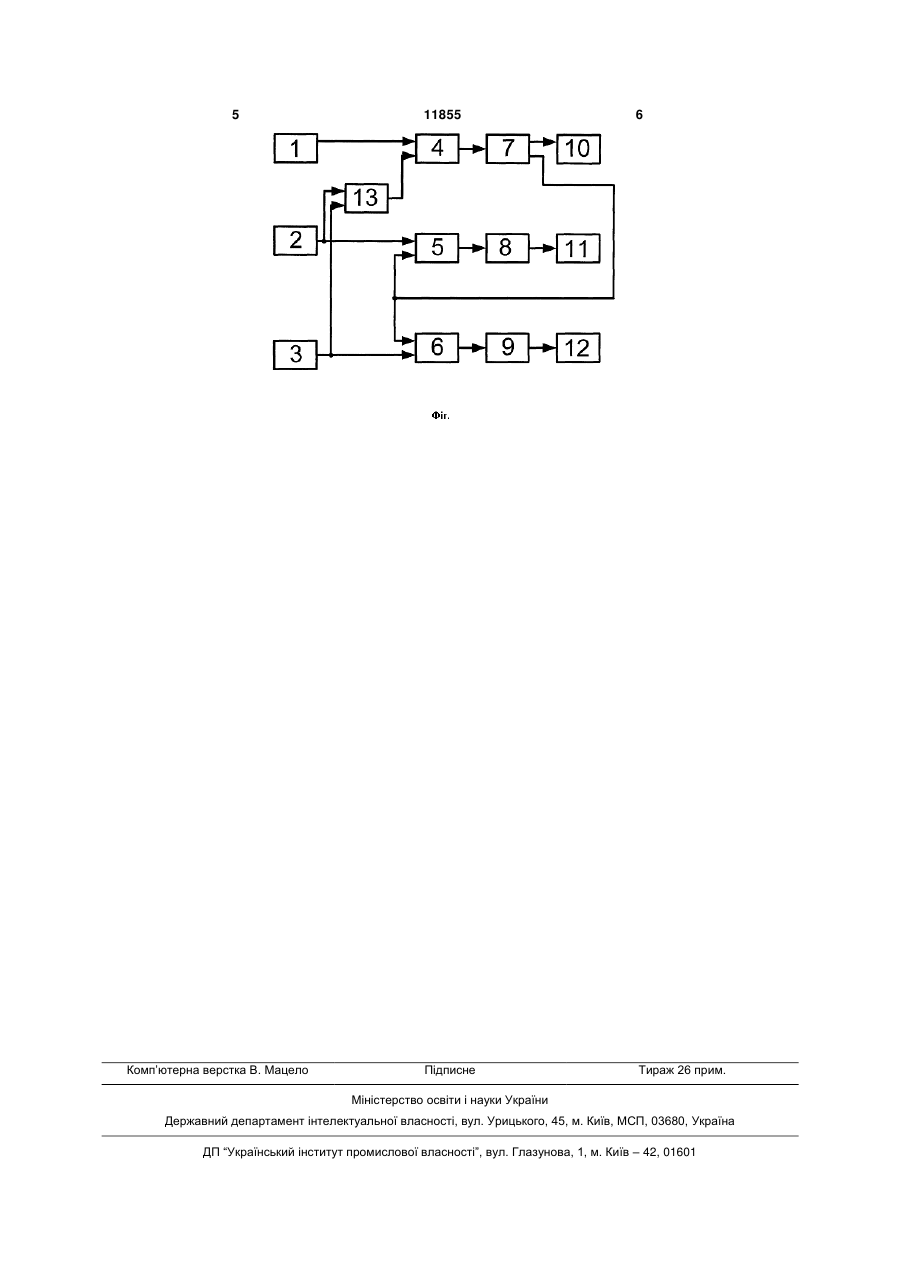
Система демпфірування кутових швидкостей вісесиметричного космічного літального апарата, що містить датчик подовжньої кутової швидкості, датчики першої та другої поперечних кутових швидкостей, блок керування виконавчими органами подовжнього каналу, блоки керування виконавчими органами першого і другого поперечних ка 3 11855 4 речних кутових швидкостей. і Z, при цьому перша і друга поперечні кутові швиСутність корисної моделі пояснюється кресдкості змінюються в часі від 0 до r0. Коли напрямок ленням, де на Фіг. представлена структурна схема поперечної кутової швидкості збігається з віссю Y, системи демпфірування кутових швидкостей костоді у=r0, z=0, а якщо з віссю Z- у = 0, z=r0. В мічного літального апарата з реактивними викоцей час необхідно демпфірувати подовжувальну навчими органами. кутову швидкість, тоді поперечна кутова швидкість Система містить датчик подовжньої кутової не змінюється і збігається з віссю Y чи віссю Z. швидкості 1, датчик першої поперечної кутової При цьому при демпфіруванні поперечної кутової швидкості 2, датчик другої поперечної кутової швидкості мінімізується витрата робочого тіла чешвидкості 3, блок 4 підключення датчика 1, блок 5 рез коллінеарність векторів поперечної кутової підключення датчика 2, блок 6 підключення датчишвидкості і керуючого моменту. ка 3, блок 7 керування виконавчими органами поСистема функціонує в такий спосіб: за доподовжнього каналу, блок 8 керування виконавчими могою датчиків 1, 2, 3 вимірюються три складові органами першого поперечного каналу, блок 9 кутової швидкості, що через блоки підключення 4, керування виконавчими органами другого попере5, 6 з'єднані з блоками керування 7, 8, 9. Блоки чного каналу, виконавчі органи подовжнього канакерування 7, 8, 9 виробляють керуючі сигнали на лу 10, виконавчі органи першого поперечного кавиконавчі органи 10, 11, 12. Одночасно складові налу 11, виконавчі органи другого поперечного поперечної кутової швидкості з датчиків 2, 3 надканалу 12, блок 13 визначення початку демпфіруходять на входи блоку визначення початку демпвання подовжньої швидкості. фірування кутових швидкостей 13, вихід якого підПісля відділення космічного апарату від носія ключений до другого входу блока 4. Другий вихід виникають кутові швидкості, які необхідно демпфіблока керування виконавчими органами подовжрувати. Запропонована система дозволяє вирішинього каналу з'єднаний з другими виходами блоків ти цю задачу, забезпечуючи мінімізацію витрат підключення датчиків першої та другої поперечних робочого тіла. кутових швидкостей. Рівняння руху для осесиметричного космічного Розглянемо процеси управління при демпфіапарата в зв'язаній системі координат OXYZ руванні подовжньої х і поперечних y та z куто(приймемо, що віссю симетрії є вісь X) записуютьвих швидкостей. У блоках 13 визначаються необся в наступному вигляді (збурюючі моменти пехідні значення поперечних кутових швидкостей, редбачаються малими і не враховуються) [див. при яких необхідно починати демпфірування поАлексеев К. Б., Бебенин Г. Г. Управление космидовжньої кутової швидкості, щоб забезпечити пісческими летательными аппаратами. М., «Машиноля демпфірування подовжньої кутової швидкості строение», 1974, 340с.]: збіг напрямку вектора поперечної кутової швидкості з напрямком однієї з поперечних Z чи Y. З враX mX ; хуванням цього витримують паузу без керування X a Z X mY ; до моменту, поки обмірювані поперечні кутові швидкості з датчиків 2, 3 не збігатимуться з необZ a Y X mZ , (1) хідними, після чого блок 13 через блоки 4 і 7 вклюде X, Y, Z - проекції кутової швидкості косчає виконавчі органи подовжнього каналу 10, що мічного апарата на осі зв'язаної системи коордипотім виключаються блоком 7 після демпфіруваннат: ня подовжньої кутової швидкості ( х=0). У резульX - подовжня кутова швидкість; таті подовжня й одна з поперечних кутових швидY - перша поперечна кутова швидкість; костей будуть дорівнювати нулю, а друга Z - друга поперечна кутова швидкість; поперечна швидкість буде дорівнювати r0. Потім mX, mY, mZ - проекції приведеного керуючого по інформації з другого виходу блока 7 через бломоменту; ки 5 і 8 включаються виконавчі органи 11, якщо а - константа. напрямок вектора поперечної кутової швидкості Вважаємо, що в початковий момент часу збігається з віссю Y, і через блоки 6, 9 включає складові кутової швидкості виконавчі органи 12, якщо напрямок вектора попезадовольняють співвідношенню = i0, i=XYZ. речної кутової швидкості збігається з віссю Z. ВиЗнайдемо вільний рух апарата шляхом інтегруконавчі органи 11 виключаються блоком 8 після вання системи (1) при mi=0: демпфірування поперечної кутової швидкості X X0 ; ( у=0), а виконавчі органи 12 виключаються блоком 9 після гасіння поперечної кутової швидкості Y r0 sin ; ( у=0). У результаті поперечні кутові швидкості Z r0 cos , (2) будуть дорівнюватися нулю. Таким чином, запропонована система дозво2 2 де r0 - модуль поперечної куY0 Z0 ляє забезпечити демпфірування початкових кутових швидкостей космічного літального апарата тової швидкості; навколо трьох осей за допомогою реактивних виa X0 t arctg Y0 - кут між напрямком конавчих органів з мінімальною витратою робочоZ0 го тіла. поперечної кутової швидкості і віссю Z. Згідно з формулою (2) поперечна кутова швидкість перерозподіляється між проекціями на осі Y 5 Комп’ютерна верстка В. Мацело 11855 6 Підписне Тираж 26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюSystem of damping the angular velocities of axially symmetrical space vehicle
Автори англійськоюBandura Ivan Mykolaiovych
Назва патенту російськоюСистема демпфирования угловых скоростей осесимметричного космического летательного аппарата
Автори російськоюБандура Иван Николаевич
МПК / Мітки
МПК: B64G 1/24
Мітки: космічного, апарата, вісесиметричного, літального, демпфірування, кутових, система, швидкостей
Код посилання
<a href="https://ua.patents.su/3-11855-sistema-dempfiruvannya-kutovikh-shvidkostejj-visesimetrichnogo-kosmichnogo-litalnogo-aparata.html" target="_blank" rel="follow" title="База патентів України">Система демпфірування кутових швидкостей вісесиметричного космічного літального апарата</a>
Спосіб демпфірування кутових швидкостей вісесиметричного космічного літального апарата
Номер патенту: 11858
Опубліковано: 16.01.2006
Автори: Бандура Іван Миколайович, Войченко Оксана Олександрівна
МПК: B64G 1/24
Мітки: літального, вісесиметричного, апарата, демпфірування, космічного, швидкостей, спосіб, кутових
Формула / Реферат:
Спосіб демпфірування кутових швидкостей вісесиметричного космічного літального апарата, який полягає в тому, що вимірюють кутові швидкості навколо трьох осей зв'язаної системи координат апарата, включають керуючі реактивні двигуни, який відрізняється тим, що для демпфірування складових кутової швидкості обертання навколо трьох осей забезпечують паузу без керування, для демпфірування подовжньої кутової швидкості визначають момент початку...
Система гасіння початкових кутових швидкостей вісесиметричного космічного літального апарата
Номер патенту: 12002
Опубліковано: 16.01.2006
Автори: Шапранов Ілля Володимирович, Бандура Іван Миколайович
МПК: B64G 1/24
Мітки: літального, кутових, космічного, швидкостей, початкових, система, гасіння, вісесиметричного, апарата
Формула / Реферат:
Система гасіння початкових кутових швидкостей вісесиметричного космічного літального апарата, що містить датчик подовжньої кутової швидкості, датчики першої і другої поперечних кутових швидкостей, блок керування виконавчими органами подовжнього каналу, блоки керування виконавчими органами першого і другого поперечних каналів, виконавчі органи подовжнього, першого і другого поперечних каналів, входи яких з'єднані з виходами відповідних блоків...
Система стабілізації безпілотного літального апарата

Номер патенту: 11981
Опубліковано: 16.01.2006
Автори: Симонов Володимир Федорович, Бандура Іван Миколайович, Величко Надія Вікторівна
МПК: B64C 13/00, G05D 1/03
Мітки: апарата, літального, система, безпілотного, стабілізації
Формула / Реферат:
Система стабілізації безпілотного літального апарата, що містить порівнювальний пристрій, датчики кута та кутової швидкості, пристрій керування, перший та другий блоки множення, порівнювач та рульовий привід, яка відрізняється тим, що до неї введена інтегруюча ланка, входом якої є вихід пристрою керування, а її вихід з'єднаний з другим входом першого блока множення та з першим входом другого блока множення.
Система розвантаження силового гіроскопічного комплексу космічного апаратa
Номер патенту: 64339
Опубліковано: 16.02.2004
Автори: Успенський Валерій Борисович, Голоскоков Євген Григорович, Кузнєцов Юрій Олексійович, Бандура Іван Миколайович
МПК: B64G 1/24
Мітки: космічного, силового, система, гіроскопічного, комплексу, апарата, розвантаження
Формула / Реферат:
Система розвантаження силового гіроскопічного комплексу космічного апарата, в яку входять вимірювач абсолютної кутової швидкості, вимірювач кінетичного моменту силового гіроскопічного комплексу, виходи яких через блок визначення сумарного кінетичного моменту космічного апарата з'єднані з входом блока фіксування допустимого сумарного кінетичного моменту космічного апарата і першим входом блока управління виконавчими органами орієнтації, перший...
Система стабілізації безпілотного літального апарата

Номер патенту: 11582
Опубліковано: 16.01.2006
Автори: Антошик Вікторія Миколаївна, Симонов Володимир Федорович, Амелін Сергій Вікторович, Бандура Іван Миколайович
МПК: G05D 1/03, B64C 13/00
Мітки: система, стабілізації, літального, апарата, безпілотного
Формула / Реферат:
1. Система стабілізації безпілотного літального апарата, що містить порівнювальний пристрій, суматор, підсилювач, рульовий привід та датчики кута тангажа та кутової швидкості тангажа, яка відрізняється тим, що в неї введено обчислювач, з'єднаний з виходом суматора та входом рульового приводу об'єкта управління, і фільтр, з'єднаний з виходом датчика кута тангажа і порівнювальним пристроєм.2. Система стабілізації безпілотного літального...
Попередній патент: Система стабілізації для тривісного гіростабілізатора
Наступний патент: Пристрій для електрохімічного вилучення іонів купруму (іі) з відпрацьованих розчинів травлення міді
Випадковий патент: Композиція покриття, яка містить полімер, що містить олігомерний макромономер