Система гасіння початкових кутових швидкостей вісесиметричного космічного літального апарата
Номер патенту: 12002
Опубліковано: 16.01.2006
Автори: Бандура Іван Миколайович, Шапранов Ілля Володимирович
Формула / Реферат
Система гасіння початкових кутових швидкостей вісесиметричного космічного літального апарата, що містить датчик подовжньої кутової швидкості, датчики першої і другої поперечних кутових швидкостей, блок керування виконавчими органами подовжнього каналу, блоки керування виконавчими органами першого і другого поперечних каналів, виконавчі органи подовжнього, першого і другого поперечних каналів, входи яких з'єднані з виходами відповідних блоків керування, яка відрізняється тим, що між кожним датчиком і блоком керування виконавчими органами введено блок визначення початку гасіння подовжньої швидкості, другий вхід блока підключення датчика подовжньої кутової швидкості з'єднаний з виходом датчика другої поперечної кутової швидкості, а вихід - з другим входом блока підключення датчика подовжньої кутової швидкості, блок визначення початку гасіння поперечної швидкості, перший вхід якого з'єднаний з виходом датчика першої поперечної кутової швидкості, другий вхід - з виходом датчика другої поперечної кутової швидкості, перший вихід - з другим входом блока підключення першої поперечної кутової швидкості, а другий вихід - з другим входом блока підключення другої поперечної кутової швидкості.
Текст
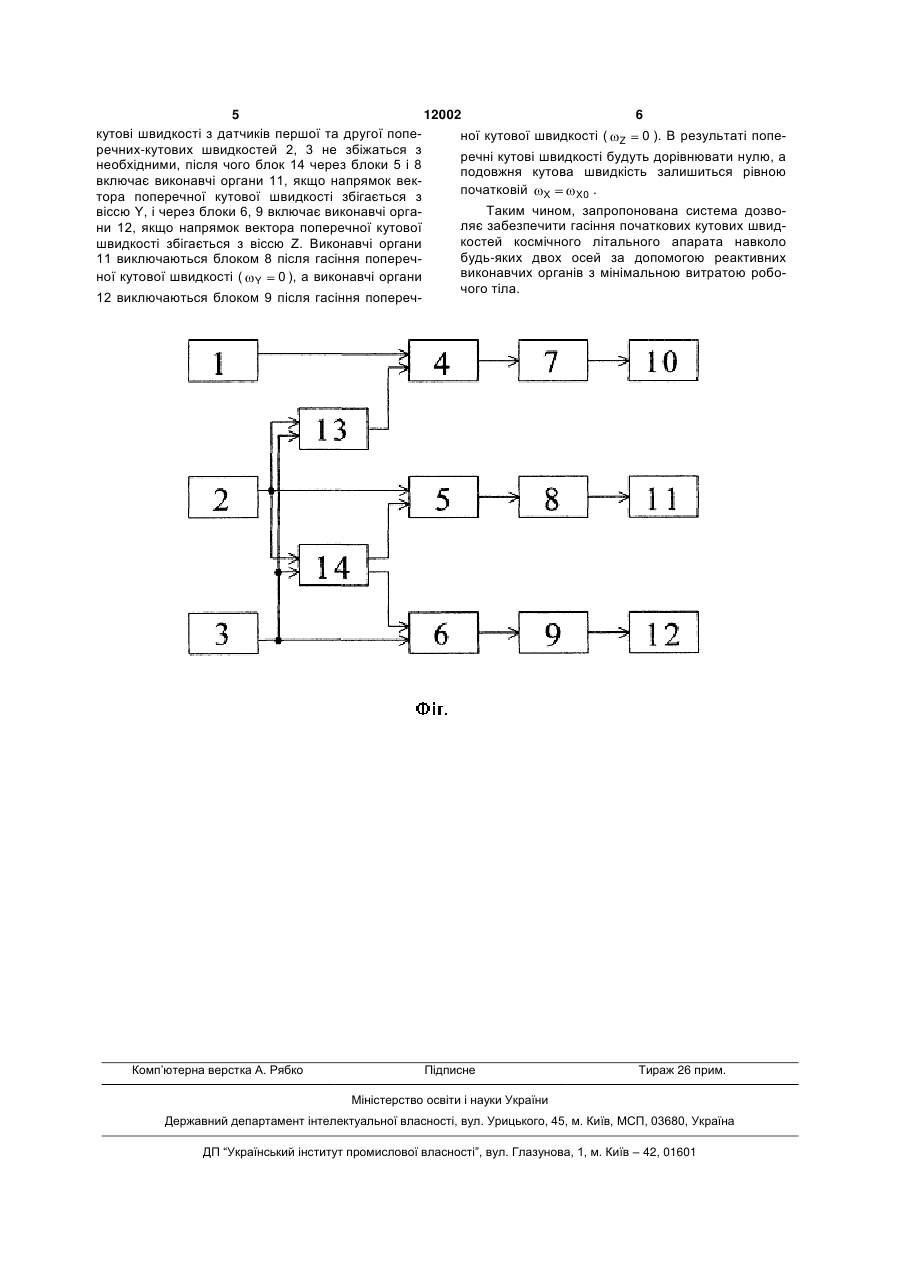
Система гасіння початкових кутових швидкостей вісесиметричного космічного літального апарата, що містить датчик подовжньої кутової швидкості, датчики першої і другої поперечних кутових швидкостей, блок керування виконавчими органами подовжнього каналу, блоки керування виконавчими органами першого і другого поперечних каналів, виконавчі органи подовжнього, першого і другого поперечних каналів, входи яких з'єднані з 3 12002 4 кутової швидкості, перший вихід з другим входом апарата шляхом інтегрування системи (1) при блока підключення першої поперечної кутової mi=0: швидкості, а другий вихід - з другим входом блока X X0 ; підключення другої поперечної кутової швидкості. r0 sin ; (2) Y Сутність корисної моделі пояснюється кресZ r0 cos , ленням, де на фіг. представлена структурна схема системи гасіння початкових кутових швидкостей 2 2 де r0 Y0 Z0 - модуль поперечної кутокосмічного літального апарата з реактивними вивої швидкості; конавчими органами. Система містить датчик подовжньої кутової a X0 t arctg Y0 - кут між напрямком швидкості 1, датчик першої поперечної кутової Z0 швидкості 2, датчик другої поперечної кутової поперечної кутової швидкості і віссю Z. швидкості 3, блок 4 підключення датчика подовжЗгідно з формулою (2) поперечна кутова швиньої кутової швидкості 1, блок 5 підключення датдкість перерозподіляється між проекціями на осі Y чика першої поперечної кутової швидкості 2, блок і Z, при цьому перша і друга поперечні кутові шви6 підключення датчика другої поперечної кутової дкості змінюються в часі від 0 до r0. Коли напрямок швидкості 3, блок 7 керування виконавчими оргапоперечної кутової швидкості збігається з віссю Y, нами подовжнього каналу, блок 8 керування викотоді Y r0 , Z 0 , а якщо з віссю Z - Y 0 , навчими органами першого поперечного каналу, блок 9 керування виконавчими органами другого r0 . В цей час необхідно погасити подовжню Z поперечного каналу, виконавчі органи подовжньокутову швидкість, тоді поперечна кутова швидкість го каналу 10, виконавчі органи першого поперечне змінюється і збігається з віссю Y чи віссю Z. ного каналу 11, виконавчі органи другого поперечПри цьому при гасінні поперечної кутової швидкосного каналу 12, блок 13 визначення початку ті мінімізується витрата робочого тіла через колгасіння подовжньої швидкості, блок 14 визначення линеарність векторів поперечної кутової швидкості початку гасіння поперечної швидкості. і керуючого моменту. Після відділення космічного апарата від носія Система функціонує в такий спосіб: за доповиникають початкові кутові швидкості, які необхідмогою датчиків 1, 2, 3 виміряються три складові но погасити. Після цього може здійснюватися рекутової швидкості, що через блоки підключення 4, жим астроорієнтації, для чого необхідно організу5, 6 з'єднані з блоками керування 7, 8, 9. Блоки вати пошук астроорієнтирів шляхом набору керування 7, 8, 9 виробляють керуючі сигнали на кутової швидкості навколо визначеної осі. Тому виконавчі органи 10, 11, 12. Одночасно складові доцільної є задача гасіння початкових кутових поперечної кутовий швидкості з датчиків першої та швидкостей тільки навколо двох осей, забезпечудругої поперечних кутових швидкостей 2, 3 надхоючи пошук астроорієнтира третьою кутовою швиддять на входи блоків визначення початку гасіння кістю, що гаситься після знаходження астроорієнкутових швидкостей 13, 14, виходи яких підключені тира. Запропонований спосіб дозволяє вирішити до других входів блоків 4, 5, 6. цю задачу, забезпечуючи мінімізацію витрат робоРозглянемо процеси управління при гасінні чого тіла. подовжньої X і однієї з поперечних Y чи Z Рівняння руху для осесиметричного космічного кутових швидкостей. У блоці 13 визначаються неапарата в зв'язаній системі координат OXYZ обхідні значення поперечних кутових швидкостей, (приймемо, що віссю симетрії є вісь X) записуютьпри яких необхідно починати гасіння подовжньої ся в наступному вигляді (збурюючі моменти пекутової швидкості, щоб забезпечити після гасіння редбачаються малими і не враховуються) [див. подовжньої кутової швидкості збіг напрямку вектоАлексеев К.Б., Бебенин Г.Г. Управление космичесра поперечної кутової швидкості з напрямком осі кими летательными аппаратами. М., "Машиностдругої поперечної швидкості Z чи Y. З врахуванроение", 1974. 340с.]: ням цього витримують паузу без керування до мо X mX; менту, поки обмірювані поперечні кутові швидкості Y a Z X mY ; (1) з датчиків першої та другої поперечних кутових Z a Y X mZ , швидкостей 2, 3 не збіжаться з необхідними, після чого блок 13 через блоки 4 і 7 включає виконавчі де X , Y , Z - проекції кутової швидкості органи подовжнього каналу 10, що потім виключакосмічного апарата на осі зв'язаної системи коорються блоком 7 після гасіння подовжньої кутової динат: швидкості ( X 0 ). В результаті подовжня й одна X - подовжня кутова швидкість; з поперечних кутових швидкостей будуть дорівнюY - перша поперечна кутова швидкість; вати нулю, а друга поперечна швидкість буде дорівнювати r0. - друга поперечна кутова швидкість; Z Тепер розглянемо процеси керування при гаm X , m Y , m Z - проекції приведеного керуючосінні двох поперечних кутових швидкостей. У блоці го моменту; 14 визначаються необхідні значення поперечних a - константа. кутових швидкостей, при яких необхідно починати гасіння з умови збігу напрямку вектора поперечної Вважаємо, що в початковий момент часу кутової швидкості з напрямком однієї з поперечних складові кутової швидкості задовольняють співвідосей. З врахуванням цього витримують паузу без ношенню i , і=X, Y, Z. Знайдемо вільний рух i0 керування до моменту, поки обмірювані поперечні 5 12002 6 кутові швидкості з датчиків першої та другої попеної кутової швидкості ( Z 0 ). В результаті поперечних-кутових швидкостей 2, 3 не збіжаться з речні кутові швидкості будуть дорівнювати нулю, а необхідними, після чого блок 14 через блоки 5 і 8 подовжня кутова швидкість залишиться рівною включає виконавчі органи 11, якщо напрямок векпочатковій X X0 . тора поперечної кутової швидкості збігається з Таким чином, запропонована система дозвовіссю Y, і через блоки 6, 9 включає виконавчі оргаляє забезпечити гасіння початкових кутових швидни 12, якщо напрямок вектора поперечної кутової костей космічного літального апарата навколо швидкості збігається з віссю Z. Виконавчі органи будь-яких двох осей за допомогою реактивних 11 виключаються блоком 8 після гасіння поперечвиконавчих органів з мінімальною витратою робоної кутової швидкості ( Y 0 ), а виконавчі органи чого тіла. 12 виключаються блоком 9 після гасіння попереч Комп’ютерна верстка А. Рябко Підписне Тираж 26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюDeceleration system of angular velocities of axially symmetrical space vehicle
Автори англійськоюBandura Ivan Mykolaiovych
Назва патенту російськоюСистема гашения начальных угловых скоростей осесимметричного космического летательного аппарата
Автори російськоюБандура Иван Николаевич
МПК / Мітки
МПК: B64G 1/24
Мітки: система, кутових, початкових, гасіння, вісесиметричного, швидкостей, літального, космічного, апарата
Код посилання
<a href="https://ua.patents.su/3-12002-sistema-gasinnya-pochatkovikh-kutovikh-shvidkostejj-visesimetrichnogo-kosmichnogo-litalnogo-aparata.html" target="_blank" rel="follow" title="База патентів України">Система гасіння початкових кутових швидкостей вісесиметричного космічного літального апарата</a>
Спосіб демпфірування кутових швидкостей вісесиметричного космічного літального апарата
Номер патенту: 11858
Опубліковано: 16.01.2006
Автори: Бандура Іван Миколайович, Войченко Оксана Олександрівна
МПК: B64G 1/24
Мітки: кутових, спосіб, космічного, апарата, вісесиметричного, швидкостей, демпфірування, літального
Формула / Реферат:
Спосіб демпфірування кутових швидкостей вісесиметричного космічного літального апарата, який полягає в тому, що вимірюють кутові швидкості навколо трьох осей зв'язаної системи координат апарата, включають керуючі реактивні двигуни, який відрізняється тим, що для демпфірування складових кутової швидкості обертання навколо трьох осей забезпечують паузу без керування, для демпфірування подовжньої кутової швидкості визначають момент початку...
Система стабілізації безпілотного літального апарата

Номер патенту: 11981
Опубліковано: 16.01.2006
Автори: Симонов Володимир Федорович, Величко Надія Вікторівна, Бандура Іван Миколайович
МПК: B64C 13/00, G05D 1/03
Мітки: апарата, система, стабілізації, літального, безпілотного
Формула / Реферат:
Система стабілізації безпілотного літального апарата, що містить порівнювальний пристрій, датчики кута та кутової швидкості, пристрій керування, перший та другий блоки множення, порівнювач та рульовий привід, яка відрізняється тим, що до неї введена інтегруюча ланка, входом якої є вихід пристрою керування, а її вихід з'єднаний з другим входом першого блока множення та з першим входом другого блока множення.
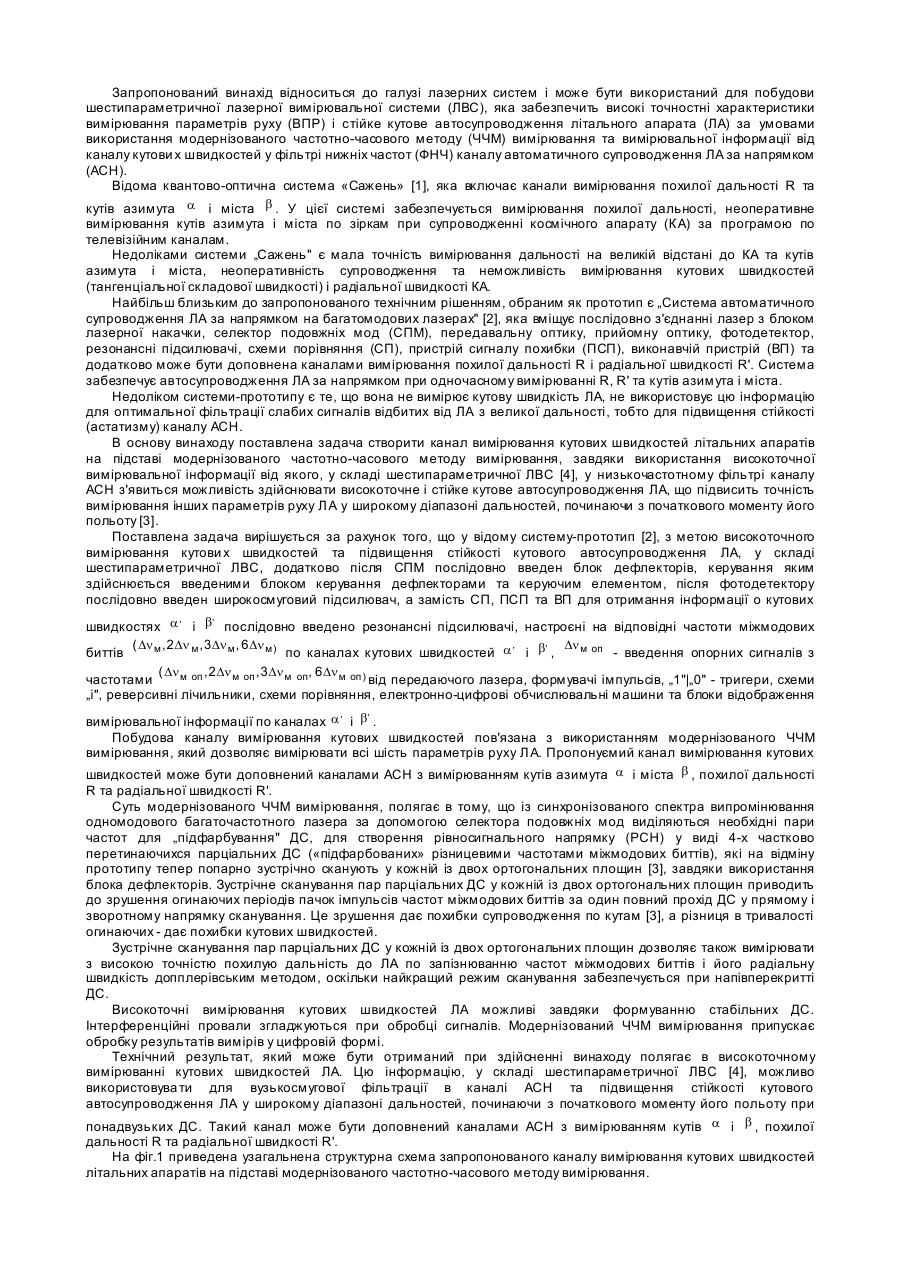
Канал вимірювання кутових швидкостей літальних апаратів на основі модернізованого частотно-часового методу
Номер патенту: 63285
Опубліковано: 15.01.2004
Автори: Пашков Дмитро Павлович, Коломійцев Олексій Володимирович, Альошин Геннадій Васильович
МПК: G01S 17/42, G01S 11/00
Мітки: канал, кутових, апаратів, основі, модернізованого, методу, частотно-часового, літальних, швидкостей, вимірювання
Формула / Реферат:
Канал вимірювання кутових швидкостей літальних апаратів на основі модернізованого частотно-часового методу, що містить послідовно підключені лазер з накачкою, селектор подовжніх мод, передавальну оптику, приймальну оптику, фотодетектор, резонансні підсилювачі, схеми порівняння амплітуд, підсилювачі у вигляді фільтрів сигналів похибок та виконавчі пристрої керування кутами азимута і місця, який відрізняється тим, що додатково після...
Система стабілізації безпілотного літального апарата

Номер патенту: 11582
Опубліковано: 16.01.2006
Автори: Антошик Вікторія Миколаївна, Амелін Сергій Вікторович, Симонов Володимир Федорович, Бандура Іван Миколайович
МПК: B64C 13/00, G05D 1/03
Мітки: літального, система, апарата, стабілізації, безпілотного
Формула / Реферат:
1. Система стабілізації безпілотного літального апарата, що містить порівнювальний пристрій, суматор, підсилювач, рульовий привід та датчики кута тангажа та кутової швидкості тангажа, яка відрізняється тим, що в неї введено обчислювач, з'єднаний з виходом суматора та входом рульового приводу об'єкта управління, і фільтр, з'єднаний з виходом датчика кута тангажа і порівнювальним пристроєм.2. Система стабілізації безпілотного літального...
Електромагнітна система формування керуючих моментів космічного апарата
Номер патенту: 37505
Опубліковано: 15.11.2002
Автори: Шмідт Ігор Рихардович, Попов Андрій Анатолійович, Ткаліч Віктор Григорович, Меланченко Олександр Геннадійович, Дмитрієв Борис Вікторович, Гладілін Віталій Сергійович, Большакова Іннеса Антонівна, Салтиков Юрій Дмитрович, Нікітіна Наталія Павлівна, Покатаєв Віктор Миколайович
МПК: B64G 1/24, G01R 33/038, G01R 33/02
Мітки: керуючих, система, моментів, формування, космічного, апарата, електромагнітна
Формула / Реферат:
1. Електромагнітна система формування керуючих моментів космічного апарата, що включає триосьовий магнітометр, блок сенсорів, що підключений по входу до блока керування системи, три канали керування, що містять електромагнітний виконавчий орган з робочими котушками, які жорстко зв'язані з осями супутника, і блоки формування напруги живлення котушок, які з'єднані з виходами блока керування через аналого-цифровий перетворювач, яка...
Попередній патент: Електромагнітний клапан
Наступний патент: Фільтр для очистки газу
Випадковий патент: Занурений газокисневий пальник