Свердловинний інтроскоп
Номер патенту: 36548
Опубліковано: 27.10.2008
Автори: Литвинський Гаррі Григорович, Касьянов Володимир Олексійович

Формула / Реферат
1. Свердловинний інтроскоп, що включає датчики, розміщені на зонді, досилаючий пристрій і вимірювальний блок для обробки показників датчиків, який відрізняється тим, що зонд забезпечено парними координатними датчиками подовжнього і кутового переміщення, кожна пара датчиків закріплена на зонді і незалежно приєднана до вимірювального блока з синхронним записом в часі результативних відліків при подовжньому і кутовому переміщенні зонда по трасі вимірювання.
2. Свердловинний інтроскоп за п. 1, який відрізняється тим, що відстань між парними датчиками вибрано мінімальною з умови допустимої помилки вимірювання, а координатні датчики подовжнього переміщення розміщені на головній частині зонда.
3. Свердловинний інтроскоп за п. 1, який відрізняється тим, що його виконано з визначенням просторових подовжньої і кутової координат ділянки, вимірювання проводять у вимірювальному блоці в режимі реального часу шляхом комп'ютерної обробки відліків обох датчиків по формулах:
а) для координат подовжнього руху зонда
![]() ,
,
![]()
б) для кутової координати
![]() ,
,
![]() ,
,
де Vi, ωi - подовжня та кутова швидкості зонда з парними датчиками в i-тій
точці траси вимірювань;
і - номер виміру в i-тій точці траси вимірювань, і=l ... n;
n - кількість вимірів;
λ, φ - подовжня і кутова відстані між відповідними парними датчиками;
∆ti - відрізок часу між однаковими відліками Пi - у парних датчиків;
t1(Пi); t2(Пi) - відліки часу для однакових показників парних датчиків;
L(t); T(t) - просторові відповідні подовжня і кутова координати вимірів;
t1(Пi); t2(Пi) - відліки часу для однакових показників парних датчиків;
Текст
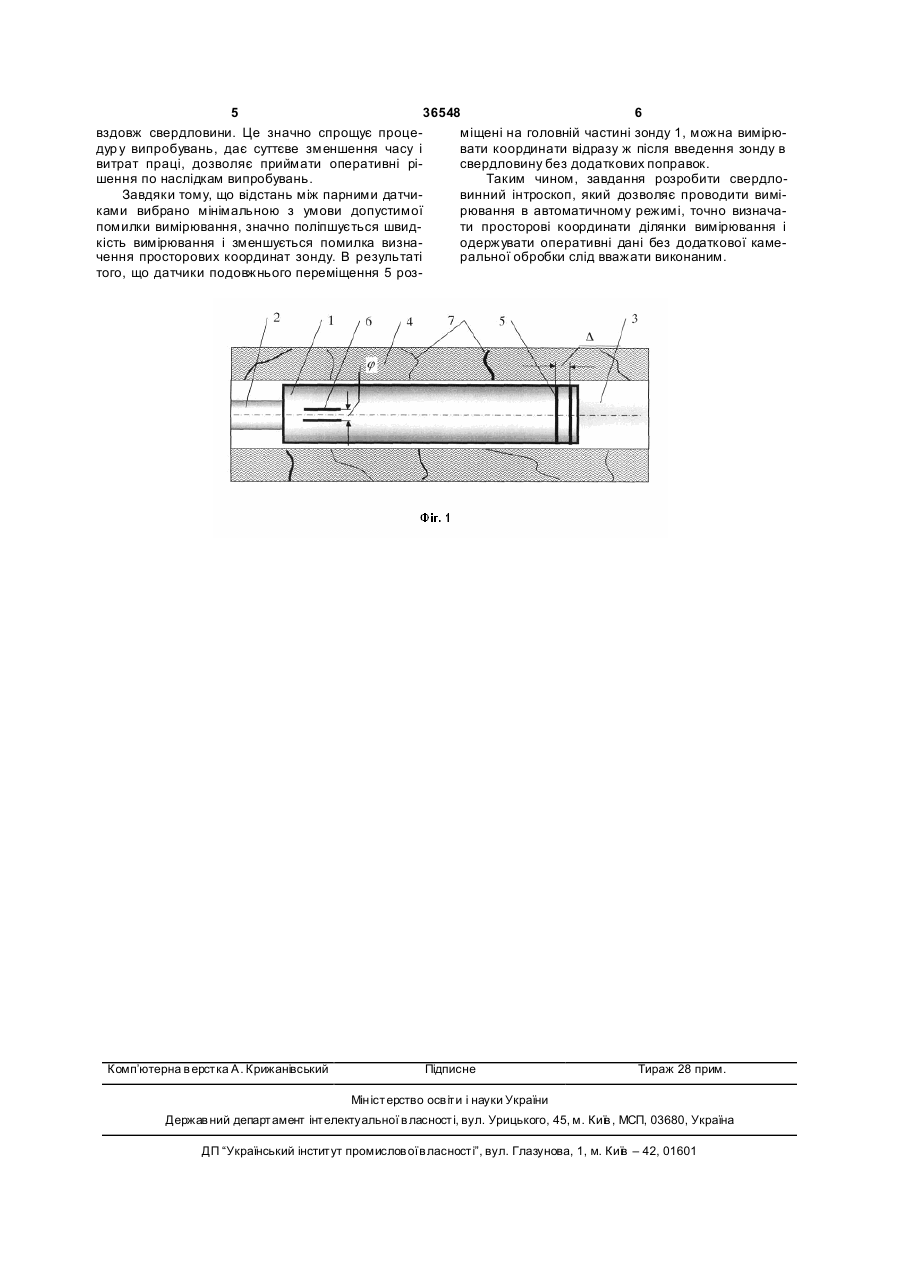
1. Свердловинний інтроскоп, що включає датчики, розміщені на зонді, досилаючий пристрій і вимірювальний блок для обробки показників датчиків, який відрізняється тим, що зонд забезпечено парними координатними датчиками подовжнього і кутового переміщення, кожна пара датчиків закріплена на зонді і незалежно приєднана до вимірювального блока з синхронним записом в часі результативних відліків при подовжньому і кутовому переміщенні зонда по трасі вимірювання. 2. Свердловинний інтроскоп за п. 1, який відрізняється тим, що відстань між парними датчиками вибрано мінімальною з умови допустимої помилки вимірювання, а координатні датчики подовжнього переміщення розміщені на головній частині зонда. 3. Свердловинний інтроскоп за п. 1, який відрізняється тим, що його виконано з визначенням просторових подовжньої і кутової координат ділянки, вимірювання проводять у вимірювальному блоці в режимі реального часу шля хом комп'ютерної обробки відліків обох датчиків по формулах: а) для координат подовжнього руху зонда Vi = l / D t i = l / [t 1(Пi ) - t 2 (Пi )] , Корисна модель відноситься до гірничої промисловості і може бути використана для контролю властивостей і стану масиву гірських порід. Відомо свердловинний інтроскоп, призначений для визначення границь порушеної зони в масиві порід, який складається з датчиків, пристрою досилання і вимірювального блоку для обробки показників датчиків [Ардашев К.А. и др. Методы и приборы для исследования проявлений горного давления, - М.: Недра, 1981, с.69-70]. Недоліком цього інтроскопу є неможливість автоматичного визначення координати датчиків у пробуреному шпурі, що призводить до низької вірогідності замірів, значної трудомісткості проведення вимірів, що пов'язано з необхідністю зупин ки зонду і зняття показників датчиків на місці зупинки. Найбільш близьким по технічній суті і результатам, що досягаються, до запропонованого інтроскопу є свердловинний інтроскоп для визначення тріщинува тості гірських порід. Він включає датчики, розміщені на зонді, досилаючий пристрій і вимірювальний блок для обробки показників датчиків [Авторское свидетельство СССР №1168710, кл. Е 21 С 39/00, 1985]. Однак і цей інтроскоп має таку ж ваду, а саме не дозволяє в автоматичному режимі проводити вимірювання інформаційних показників масиву, тому що потребує значних ви трат часу на зупинку зонду і проведення маніпуляцій по фіксації показ t n 0 i =0 L (t ) = ò V (t)d t або L (t ) = å Vi (t )Dti б) для кутової координати wi = j / Dt i = j / [t1 (П i ) - t 2 (П i )] , t n 0 i=0 (13) 36548 (19) UA (11) де Vi, ωi - подовжня та кутова швидкості зонда з парними датчиками в i-тій точці траси вимірювань; і - номер виміру в i-тій точці траси вимірювань, і=1 ... n; n - кількість вимірів; l, φ - подовжня і кутова відстані між відповідними парними датчиками; ∆ti - відрізок часу між однаковими відліками П i - у парних датчиків; t1(П i); t2(П i) - відліки часу для однакових показників парних датчиків; L(t); T(t) - просторові відповідні подовжня і кутова координати вимірів; t1(П i); t2(П i) - відліки часу для однакових показників парних датчиків; U Г (t ) = ò w(t )d t або Г (t ) = å wi (t )Dt i , 3 36548 4 ників датчиків і визначення їх просторових коордипорід за рахунок автоматичного визначення проснат, що виконується ручними вимірами по доситорових координат датчиків інтроскопу. лаючому пристрою і має невелику точність. На фігурі 1 зображено конструкцію свердлоВ основу корисної моделі покладено завдання винного інтроскопа у масиві. удосконалення свердловинного інтроскопа, у якоСвердловинний інтроскоп включає зонд 1, му завдяки використанню парних координатних який введено за допомогою досилаючого придатчиків з незалежним приєднанням до вимірювастрою 2 через свердловину 3 у масив гірських польного блоку з синхронним записом показників у рід 4. На зонді 1 розміщено парні датчики для вичасі досягається можливість автоматичного режимірювання подовжньої 5 і кутової 6 просторової му вимірювання і підвищення його швидкості, що координати. Парні датчики 5 подовжньої коордидозволяє зменшити витрати часу і підвищити іннати встановлено на головній частині зонда 1. формативність вимірювання. Кожний з парних датчиків 5 і 6 для визначення Ця технічна задача досягається тим, що у свепросторових подовжньої і кутової координат ділянрдловинному інтроскопі, який включає датчики, ки вимірювання приєднано незалежно до вимірюрозміщені на зонді, досилаючий пристрій і вимірювального блоку (не показано). вальний блок для обробки показників датчиків, Працює свердловинний інтроскоп у такий спозгідно корисної моделі зонд забезпечено парними сіб. координатними датчиками подовжнього і кутового Зонд 1 пересувають по свердловині 3 за допереміщення, кожна пара датчиків закріплена на помогою досилаючого пристрою 2 з будь-якою зонді і незалежно приєднана до вимірювального швидкістю, в тому числі і нерівномірною. Парні блоку з синхронним записом в часі результативних датчики 5 і 6 на зонді 1 реагують на стр уктурні відліків при подовжньому і кутовому переміщенні неоднорідності 7 масиву гірських порід 4 і посилазонду по трасі вимірювання. ють відповідні сигнали на блок вимірювання (не Доцільно у свердловинному інтроскопі відпоказано), де вони записуються як функція часу. стань між парними датчиками виконати мінімальОскільки відстань між парними датчиками фіксоною з умови допустимої помилки вимірювання, а вано, то можна за допомогою комп'ютерної прокоординатні датчики подовжнього переміщення грами в реальному часі визначити подовжню і кувстановити на головній частині зонда. тову швидкості пересування зонду 1 відносно Крім того, доцільно свердловинний інтроскоп масиву гірських порід 4 по формулам: виконати з визначенням просторових подовжньої і а) для подовжнього руху зонду кутової координат ділянки вимірювання у вимірю= l / D ti l / [t1(Пi ) - t2 (Пi )] Vi = вальному блоці в режимі реального часу шляхом б) для кутового обертання зонду комп'ютерної обробки відліків обох датчиків по wi j / Dt i j / [t1(Пi ) - t 2 (Пi )] = = формулам: а) для координат подовжнього руху зонда де Vi, wi - подовжня та кутова швидкості зонда з парними датчиками в i-тій точці траси вимірюVi = l / D ti = l / [t1(Пi ) - t2 (Пi )] ; вань; t t і - номер виміру в i-тій точці траси вимірювань, L (t ) = ò V(t )dt або L (t ) = å Vi (t )Dti і=1 ... n; i=0 0 n - кількість вимірів; б) для кутової координати l, j - подовжня і кутова відстані між відповідwi = j / Dt i = j /[t1(Пi ) - t 2 (Пi )] ; ними парними датчиками; t t Dti - - відрізок часу між однаковими відліками Пi Г (t ) = ò w(t)d t або Г (t ) = å wi (t )D ti у парних датчиків; i=0 0 t1(П i); t2(П i) - відліки часу для однакових показде Vi, wi - подовжня та кутова швидкості зонда ників парних датчиків; з парними датчиками в i-тій точці траси вимірюВикористовуючи на підставі відліків парних давань; тчиків 5 і 6 залежність швидкості від часу, можна і - номер виміру в i-тій точці траси вимірювань, визначити подовжню L і кутову Г просторові коорі=1 ... n; динати розташування зонду в масиві гірських порід n - кількість вимірів; по формулам для при дискретній або безперервl, j - подовжня і кутова відстані між відповідній формі обчислювання: ними парними датчиками; t t Dti - - відрізок часу між однаковими відліками Пi L (t ) = ò V(t )dt або L (t ) = å Vi (t )Dti у парних датчиків; i=0 0 t1(П i); t2(П i) - відліки часу для однакових показt t ників парних датчиків; Г (t ) = ò w(t)d t або Г (t ) = å wi (t)D ti L(t); Г(t) - просторові відповідні подовжня і куi =0 0 това координати вимірів; де L(t) i Г(t) - просторові подовжня і кутова коt1(П i); t2(П i) - відліки часу для однакових показординати зонду 1. ників парних датчиків ; Так визначають просторові координаті зонду 1 Така конструкція свердловинного інтроскопа свердловинного інтроскопа при будь якому законі дозволяє зменшити витрати часу і трудомісткість, його переміщення, що дає змогу проводити виміпідвищити інформативність і точність дослідження рювання без зупинки зонду 1 у свердловині 3, а по показників структурних параметрів масиву гірських дисплею блоку вимірювання стежити в реальному часі за змінами інформаційних показників масиву 5 36548 6 вздовж свердловини. Це значно спрощує процеміщені на головній частині зонду 1, можна вимірюдур у випробувань, дає суттєве зменшення часу і вати координати відразу ж після введення зонду в витрат праці, дозволяє приймати оперативні рісвердловину без додаткових поправок. шення по наслідкам випробувань. Таким чином, завдання розробити свердлоЗавдяки тому, що відстань між парними датчивинний інтроскоп, який дозволяє проводити виміками вибрано мінімальною з умови допустимої рювання в автоматичному режимі, точно визначапомилки вимірювання, значно поліпшується швидти просторові координати ділянки вимірювання і кість вимірювання і зменшується помилка визнаодержувати оперативні дані без додаткової камечення просторових координат зонду. В результаті ральної обробки слід вважати виконаним. того, що датчики подовжнього переміщення 5 роз Комп’ютерна в ерстка А. Крижанівський Підписне Тираж 28 прим. Міністерство осв іт и і науки України Держав ний департамент інтелектуальної в ласності, вул. Урицького, 45, м. Київ , МСП, 03680, Україна ДП “Український інститут промислов ої в ласності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюWell introscope
Автори англійськоюLytvynskyi Harri Hryhorovych, Kasianov Volodymyr Oleksiiovych
Назва патенту російськоюСкважинный интроскоп
Автори російськоюЛитвинский Гарри Григорьевич, Касьянов Владимир Алексеевич
МПК / Мітки
МПК: G01V 3/00
Мітки: свердловинний, інтроскоп
Код посилання
<a href="https://ua.patents.su/3-36548-sverdlovinnijj-introskop.html" target="_blank" rel="follow" title="База патентів України">Свердловинний інтроскоп</a>
Електроємнісний інтроскоп для масиву гірських порід еі-3
Номер патенту: 31998
Опубліковано: 25.04.2008
Автори: Литвинський Гаррі Григорович, Касьянов Володимир Олексійович
МПК: G01V 3/02
Мітки: масиву, гірських, порід, інтроскоп, еі-3, електроємнісний
Формула / Реферат:
Електроємнісний інтроскоп масиву гірських порід, що включає пристрій для виміру, з'єднаний кабелем з генератором, зонд, що має корпус у вигляді труби з заглушками, який приєднано до штанг досилання в шпур, який відрізняється тим, що зонд виконано з трьох металевих електродів, двох крайніх у вигляді передньої і задньої заглушок однакової довжини, які підключено до нульового проводу генератора, і активного середнього, який підключено до...
Свердловинний рівнемір-пробовідбирач
Номер патенту: 36566
Опубліковано: 15.04.2003
Автори: Кучін Ігор Миколайович, Бондаренко Дмитро Григорович
МПК: E21B 47/04
Мітки: рівнемір-пробовідбирач, свердловинний
Формула / Реферат:
Свердловинний рівнемір-пробовідбирач, що містить корпус, барабан з тросом і лічильним приладом, джерела звукового і електричного сигналів, який відрізняється тим, що на кінці троса закріплений вимірювальний зонд, виконаний у вигляді циліндричного металевого корпуса з охоплюючою його кришкою, в нижній порожнині якого встановлений стакан-пробовідбирач з отвором у дні і розташованим в ньому пелюстковим клапаном, на кришку і виступний по колу...
Свердловинний рівнемір-пробовідбірник
Номер патенту: 36566
Опубліковано: 16.04.2001
Автори: Кучін Ігор Миколайович, Бондаренко Дмитро Григорович
МПК: E21B 47/04
Мітки: свердловинний, рівнемір-пробовідбірник
Формула / Реферат:
Свердловинний рівнемір-пробовідбирач, що містить корпус, барабан з тросом і лічильним приладом, джерела звукового і електричного сигналів, який відрізняється тим, що на кінці троса закріплений вимірювальний зонд, виконаний у вигляді циліндричного металевого корпуса з охоплюючою його кришкою, в нижній порожнині якого встановлений стакан-пробовідбирач з отвором у дні і розташованим в ньому пелюстковим клапаном, на кришку і виступний по колу...
Свердловинний пристрій для селективного гамма-гамма- каротажу
Номер патенту: 80035
Опубліковано: 10.08.2007
Автори: Головко Олександр Вікторович, Азарян Альберт Арамаісович, Василенко Вячеслав Євгенійович
МПК: G01V 5/00
Мітки: свердловинний, пристрій, гамма-гамма, селективного, каротажу
Формула / Реферат:
Свердловинний пристрій для селективного гамма-гамма-каротажу, що містить пульт керування з джерелом живлення, мікропроцесором та програмувальним і оперативним запам'ятовуючими пристроями, з'єднаними з відповідними входами мікропроцесора, дисплеєм, контролер якого з’єднаний з виходом мікропроцесора, зонд, який складається з циліндричного корпусу з розміщеними у ньому двома джерелами гамма-випромінювання, розміщеними в контейнері, встановленому...
Свердловинний гідроперфоратор

Номер патенту: 12603
Опубліковано: 28.02.1997
Автори: Копач Ігор Васильович, Лобода Роман Богданович, Степанчиков Олександр Омелянович
МПК: E21B 43/114
Мітки: гідроперфоратор, свердловинний
Формула / Реферат:
Скважинный гидроперфоратор, включающий отклонитель, соединенный с нагнетательной колонной насосно-компрессорных труб (НКТ), гибкий трубчатый зонд с соплом на конце, установленный с возможностью осевого перемещения под действием поршня гидропривода выдвижения зонда, и датчики положения, взаимодействующие С поршнем, отличающийся тем, что поршень снабжен постоянным магнитом, а в стенках гидроцилиндра установлены разнесенные по его длине с...
Попередній патент: Запобіжна вибухова речовина
Наступний патент: Спосіб прогнозування ремоделінгу бронхів на тлі хронічного та рецидивуючого бронхіту
Випадковий патент: Препарат для санації сперми кнурів "гентадекс"