Гідросистема керування навантажувальною машиною
Номер патенту: 39198
Опубліковано: 15.06.2001
Автори: Левін Олександр Михайлович, Криворотько Олег Дмитрович
Формула / Реферат
1. Гидросистема управления погрузочной машиной на гусеничном ходу с гидромоторами для каждой гусеницы, связанными подводящими и отводящими магистралями с управляемыми гидрораспределителями хода, соединенными напорной магистралью с гидронасосом, отличающаяся тем, что она выполнена с гидравлическим блоком, снабженным тремя напорными золотниками и гидрораспределителем управления, при этом два первых напорных золотника установлены в магистралях между гидромоторами и гидрораспределителями хода, а третий напорный золотник установлен в магистрали между гидромоторами, а гидрораспределитель управления установлен в напорной магистрали между гидронасосом и линиями управления напорными золотниками с возможностью соединения напорной магистрали с линиями управления первых двух напорных золотников или с линией управления третьего напорного золотника.
2. Гидросистема по п.1, отличающаяся тем, что в гидравлический блок введены два дополнительных напорных золотника, которые расположены в магистралях между подводящей и отводящей магистралями гидрораспределителей хода, при этом их линии управления соединены с линией управления третьего напорного золотника.
Текст
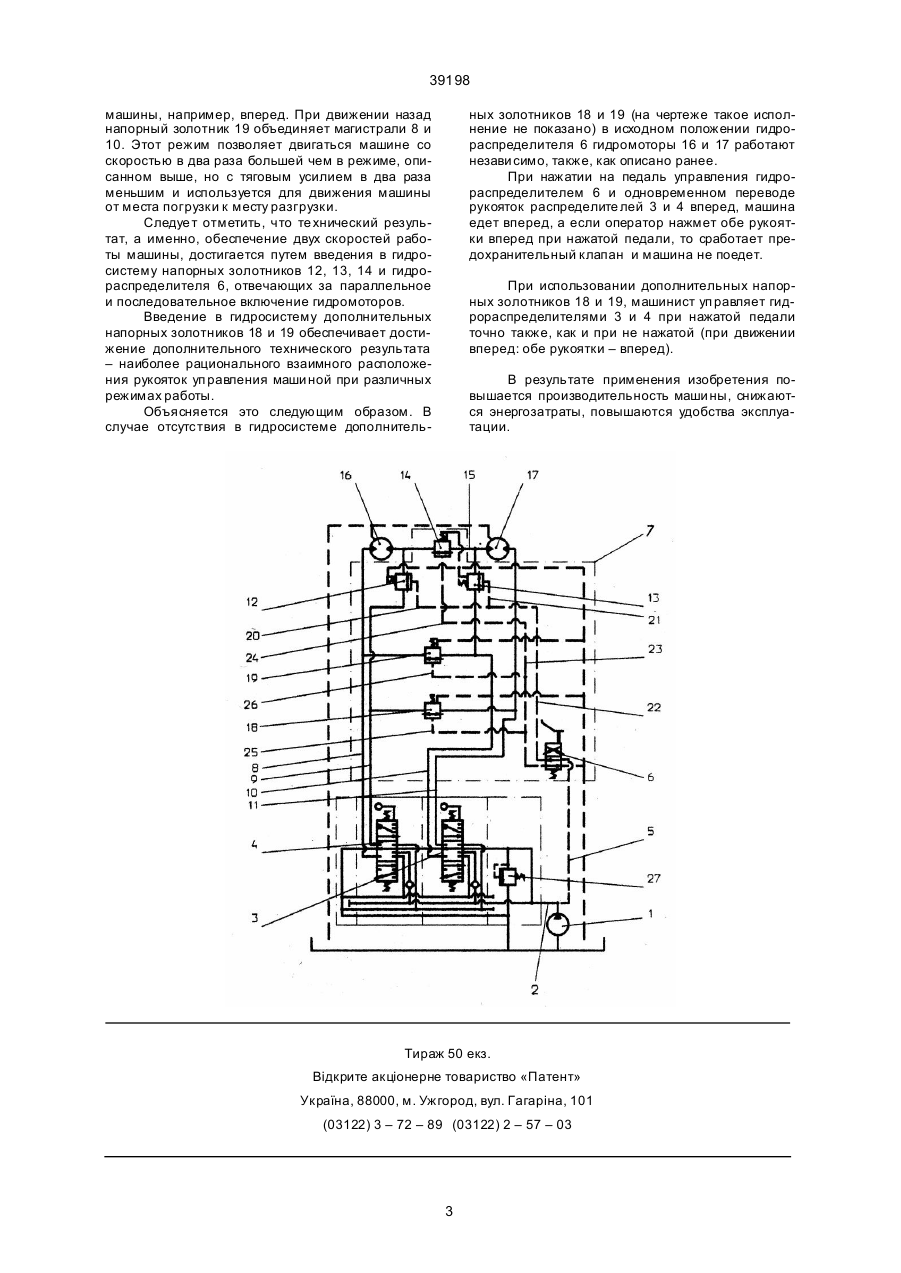
1. Гидросистема управления погрузочной машиной на гусеничном ходу с гидромоторами для каждой гусеницы, связанными подводящими и отводящими магистралями с управляемыми гидрораспределителями хода, соединенными напорной магистралью с гидронасосом, отличающаяся C2 (54) ГІДРОСИСТЕМА КЕРУВАННЯ НАВАНТАЖУВАЛЬНОЮ МАШИНОЮ 39198 два гидрораспределителя. В прототипе нет других уп равляющих элементов, позволяющи х регулировать работу гидромоторов, т.е. увеличить или уменьшить тяговое уси лие или скорость в зависимости от режимов работы машины. В основу изобретения поставлена задача, в гидросистеме управления погрузочной машиной на гусеничном ходу, посредством введения гидроблока с управляющими элементами, регулирующи ми работу гидромоторов, обеспечить две скорости дви жения машины с различными тяговыми уси лиями для соответствующих режимов работы, при применении гидронасоса с расхо дом жидкости в два раза меньшим, чем у прототипа. Первая скорость, применяемая для погрузки и маневрирования, обеспечивает максимальное тяговое уси лие. Вторая скорость, в два раза более высокая, необхо дима для движения от места погрузки к месту разгрузки с тяговым усилием в 2 раза меньшим, чем при первой скорости. Такая гидросистема позволит также получить дополнительный технический результат: обеспечить наиболее рациональное взаимное расположение рукояток управления машиной при различных режимах работы, уменьшить нагрев рабочей жидкости, сократить объем маслобаков, снизить мощность привода гидронасоса. Снижение скорости движения при погрузке и маневрировании в два раза и последовательное включение низкой и высокой скоростей при движении по прямой позволяет снизить динамические нагрузки на машиниста. Поставленная задача решается следующим образом. В гидросистему, включающую гидромоторы привода для каждой гусеницы, связанные подводяще-отво дящи ми магистралями с уп равляемыми гидрораспределителями хода, соединенными напорной магистралью с гидронасосом, согласно изобретению, введен гидравлический блок, снабженный тремя напорными золотниками и гидрораспределителем управления, при этом два первых на порных золотника установлены в подводяще-отво дящи х магистралях между гидромоторами хода и гидрораспределителем хода, а третий напорный золотник уста новлен в магистрали между гидромоторами, а гидрораспределитель уп равления уста новлен в магистрали между гидронасосом и линиями управления напорными золотниками с возможностью соединения напорной магистрали с линиями управления первых двух золотников или с линией управления третьего напорного золотника. Кроме того, в блок введены два дополнительных напорных золотника, кото рые расположены в магистралях между подводяще-отводящими магистралями гидрораспределителей хода, при этом их ли нии управления соединены с линией управления третьего напорного золотника. Введение в гидросистему гидравлического блока, снабженного тремя напорными золотниками и гидрораспределителем управления, установленным в магистрали между гидронасосом и линиями управления напорными золотниками, два из которых установлены в магистралях между гидромоторами и гидрораспределителями хода, а третий – в магистрали между гидромоторами позволяет соединить гидромото ры последовательно при движении между п унктами погрузки и разгрузки, а затем включать их не зависимо друг от друга при маневрировании и погрузке породы. В первом случае скорость движения максимальная, а во вто ром – в два раза меньшая, но с тяговым усилием в два раза большим. Два дополнительных золотника, расположенные между подводяще-отводящими магистралями и соединенные линиями управления с линией управления третьего напорного золотника, обеспечивают наиболее рациональное взаимное расположение рукояток управления машиной при различных режимах ее работы. На чертеже, поясняющим суть изобретения, представлена принципиальная гидравлическая схе ма управления гусеничным ходом погрузочной машины. Гидронасос 1 соединен напорной магистралью 2 с гидрораспределителями хода 3 и 4 напорной магистралью 5 с гидрораспределителем уп равления 6 гидравлического блока 7. Кроме того, блок соединен подводяще-отводящими магистралями 8, 9, 10 и 11 с гидрораспределителями хода 3 и 4. Блок 7 снабжен двумя первыми напорными золотниками 12 и 13, которые нахо дятся на подводяще-отво дящи х магистралях 9 и 10, третьим напорным золотником 14 в магистрали 15 между гидромоторами 16 и 17 и еще двумя дополнительными напорными золотниками 18 и 19, расположенными так, что напорный золотник 18 объединяет подводяще-отводящие магистрали 9 и 11, а 19 – магистрали 8 и 10. В бло ке гидравлическом 7 линии управления 20, 21 напорных золотников 12, 13 соединены с линией управления 22 от гидрораспределителя 6. Другая линия управления 23 от гидрораспределителя 6 соединена с линиями управления 24, 25, 26 напорных золотников 14, 18 и 19. Гидросистема защище на предохранительным клапаном 27. Управление гидрораспределителями хода 3 и 4 выполняется рукоятками, а гидрораспределителем управления 6 – педалью. В исходном положении гидрораспределителя 6 рабочая жидкость подается от насоса 1 по напорной магистрали 5 через гидрораспределитель 6 по линии управления 22 к линиям управления 20, 21 напорными золотниками 12 и 13, а линии управления 24, 25, 26 напорными золотниками 14, 18, 19 соединены со сливом. В этом случае при срабатывании золотников 12 и 13, гидромоторы 16 и 17 управляются гидрораспределителями 3 и 4 независимо друг от друга. При этом гидросистема обеспечивает максимальное тяговое усилие машины и пониженную скорость движения, необхо димые при маневрировании и погрузке породы. При нажатии на педаль управления гидрораспределителем 6 рабочая жидкость подается в линии управления 24, 25, 26 напорных золотников 14, 18, 19, а линии управления 20, 21 напорных золотников 12, 13 соединяются со сливом. В этом случае рабочая жидкость сливается из одного гидромотора в другой (мото ры соединены последовательно), что осуществляется напорным золотником 14. Напорный золотник 18 объединяет магистрали 9 и 11 от гидрораспределителей хода 3 и 4, которые подают рабочую жидкость при движении 2 39198 машины, например, вперед. При движении назад напорный золотник 19 объединяет магистрали 8 и 10. Этот режим позволяет двигаться машине со скоростью в два раза большей чем в режиме, описанном выше, но с тяговым усилием в два раза меньшим и используется для движения машины от места погрузки к месту разгрузки. Следуе т отметить, что те хнический результат, а именно, обеспечение двух скоростей работы машины, достигается путем введения в гидросистему напорных золотников 12, 13, 14 и гидрораспределителя 6, отвечающих за параллельное и последовательное включение гидромоторов. Введение в гидросистему дополнительных напорных золотников 18 и 19 обеспечивает достижение дополнительного технического результата – наиболее рационального взаимного расположения рукояток уп равления маши ной при различных режимах работы. Объясняется это следующим образом. В случае отсутствия в гидросистеме дополнитель ных золотников 18 и 19 (на чертеже такое исполнение не показано) в исходном положении гидрораспределителя 6 гидромоторы 16 и 17 работают незави симо, также, как описано ранее. При нажатии на педаль управления гидрораспределителем 6 и одновременном переводе рукояток распределите лей 3 и 4 вперед, машина едет вперед, а если оператор нажмет обе рукоятки вперед при нажатой педали, то сработает предохранительный клапан и машина не поедет. При использовании дополнительных напорных золотников 18 и 19, машинист уп равляет гидрораспределителями 3 и 4 при нажатой педали точно также, как и при не нажатой (при движении вперед: обе рукоятки – вперед). В результате применения изобретения повышается производительность маши ны, снижаются энергозатраты, повышаются удобства эксплуатации. Тираж 50 екз. Відкрите акціонерне товариство «Патент» Україна, 88000, м. Ужгород, вул. Гагаріна, 101 (03122) 3 – 72 – 89 (03122) 2 – 57 – 03 3
ДивитисяДодаткова інформація
Назва патенту англійськоюHydraulic system of control of loader
Автори англійськоюKryvorotko Pleh Dmytrovych, Levin Oleksandr Mykhailovych
Назва патенту російськоюГидросистема управления погрузочной машиной
Автори російськоюКриворотько Олег Дмитриевич, Левин Александр Михайлович
МПК / Мітки
Мітки: гідросистема, навантажувальною, керування, машиною
Код посилання
<a href="https://ua.patents.su/3-39198-gidrosistema-keruvannya-navantazhuvalnoyu-mashinoyu.html" target="_blank" rel="follow" title="База патентів України">Гідросистема керування навантажувальною машиною</a>
Гідросистема керування механізованим кріпленням
Номер патенту: 5792
Опубліковано: 29.12.1994
Автори: Лохов Юрій Борисович, Монін Леонід Моісейович
МПК: E21D 23/16, F15B 13/01
Мітки: керування, кріпленням, гідросистема, механізованим
Формула / Реферат:
Гидросистема управления механизированной крепью, содержащая гидроцилиндр передвижения и гидростойку со стоечным блоком, полости которых сообщены с напорными и сливной гидролиниями через распределитель, и гидрозамок, полость управления которого сообщена с бесштоковой полостью гидроцилиндра передвижения и распределителем, отличающаяся тем, что, с цедью упрощения конструкции, полость управления гидрозамка сообщена с его входом и с...
Пристрій програмного управління роторною навантажувальною машиною
Номер патенту: 8575
Опубліковано: 30.09.1996
Автори: Ничик Іван Яковлевич, Шкляренко Олег Майорович, Родненко Володимир Стефанович
МПК: E02F 3/18
Мітки: машиною, управління, програмного, навантажувальною, роторною, пристрій
Формула / Реферат:
Устройство программного управления роторной погрузочной машиной, содержащее датчик угла поворота машины в плане, датчик угла наклона стрелы, датчик нагрузки роторного колеса и блок управления, соединенный с исполнительным элементом, отличающееся тем, что, с целью повышения надежности программного управления, оно снабжено дополнительным датчиком угла поворота машины в плане, блоком определения произведения функции угла наклона и величины...
Гідросистема
Номер патенту: 15527
Опубліковано: 30.06.1997
Автори: Сергеєв Сергій Гаврилович, Кирилюк Анатолій Харитонович, Чміленко Анатолій Олександрович, Іванчук Михайло Іванович, Харченко Микола Михайлович
МПК: F15B 11/00
Мітки: гідросистема
Формула / Реферат:
Гидросистема, содержащая бак, шестеренный насос с предохранительным клапаном, исполнительные гидроцилиндры, поршневые и штоковые полосы которых подключены гидролиниями к насосу и баку через соответствующие трехпозиционные гидрораспределители с устройством управления и пружинным возвратом золотников в нейтральное положение, отличающаяся тем, что устройство управления выполнено в виде основания с закрепленными на нем гидрораспределителями и...
Пристрій для управління самохідною сільськогосподарською машиною
Номер патенту: 9168
Опубліковано: 30.09.1996
Автори: Завгородній Віталій Євгенійович, Збарський Борис Абрамович, Покуса Олексій Олександрович, Умеренко Аркадій Аркадійович, Кузьмінов Вадим Георгійович
МПК: A01B 69/04
Мітки: машиною, управління, сільськогосподарською, самохідною, пристрій
Формула / Реферат:
Устройство для управления самоходной сельскохозяйственной машиной, содержащее насосную станцию с маслобаком, следящую систему автоматического управления с гидроцилиндром управляемых колес и гидрораспределителем, кинематически связанным с копирующими щупами и управляемыми колесами посредством рычагов и телескопической тяги обратной связи с гидравлическим тормозным звеном, узел дистанционного управления с насосом-дозатором и...
Пристрій управління самохідною сільськогосподарською машиною
Номер патенту: 7747
Опубліковано: 26.12.1995
Автори: Завгородній Віталій Євгенович, Кузьмінов Вадим Георгійович, Умеренко Аркадій Аркадійович, Русанов Іван Іванович, Соболєв Анатолій Ігорович, Анюхін Володимир Михайлович
МПК: A01B 69/04
Мітки: управління, самохідною, пристрій, машиною, сільськогосподарською
Формула / Реферат:
1. Устройство управления самоходной сельскохозяйственной машиной, содержащее следящую систему с копирующими щупами, гидрораспределителем и гидроцилиндром управляемых колес, узел дистанцонного управления, клапан слива рабочей жидкости и гидроцилиндр обратной связи, отличающееся тем, что, с целью обеспечения работоспособности устройства и снижения трудоемкости подключения его гидросистемы к энергоблоку клапан слива выполнен...
Попередній патент: Спосіб присвоювання частот базовим станціям мобільної радіомережі
Наступний патент: Механізоване кріплення сполучення
Випадковий патент: Системи та способи виконання регулювання посилення