Пристрій програмного управління роторною навантажувальною машиною
Номер патенту: 8575
Опубліковано: 30.09.1996
Автори: Ничик Іван Яковлевич, Шкляренко Олег Майорович, Родненко Володимир Стефанович
Формула / Реферат
Устройство программного управления роторной погрузочной машиной, содержащее датчик угла поворота машины в плане, датчик угла наклона стрелы, датчик нагрузки роторного колеса и блок управления, соединенный с исполнительным элементом, отличающееся тем, что, с целью повышения надежности программного управления, оно снабжено дополнительным датчиком угла поворота машины в плане, блоком определения произведения функции угла наклона и величины выдвижения верхней части машины, датчиком величины выдвижения верхней части машины, блоками дистанционной установки нуля, шестью операционными усилителями и пультом управления, выполненным из выключателей, переключателя и задатчиков, при этом выключатели подключены к узлам дистанционной установки в "0", которые соединены с соответствующим датчиком угла поворота машины в плане, выходы которых подключены к входам первого и пятого операционных усилителей, выход датчика наклона стрелы подключен к одному из входов блока определения: произведения функций угла наклона и величины выдвижения верхней части машины и к первым входам второго, третьего и четвертого операционных усилителей, выход датчика величины выдвижения верхней части машины соединен с другим входом блока определения произведения функций угла наклона и величины выдвижения верхней части машины и к вторым входам второго, третьего и четвертого операционных усилителей, третьи входы которых подключены к соответствующим задатчикам пульта управления, при этом четвертые входы второго и четвертого операционных усилителей подключены к выходу блока определения произведения функций угла наклона и величины выдвижения верхней части машины, пятые входы второго и четвертого операционных усилителей соединены с соответствующими датчиками угла поворота машины в плане, выходы операционных усилителей подключены к входам блока управления, другие входы которого соединены с переключателем пульта управления, информационные входы блока управления подключены к клеммам устройства "Влево", "Вправо".
Текст
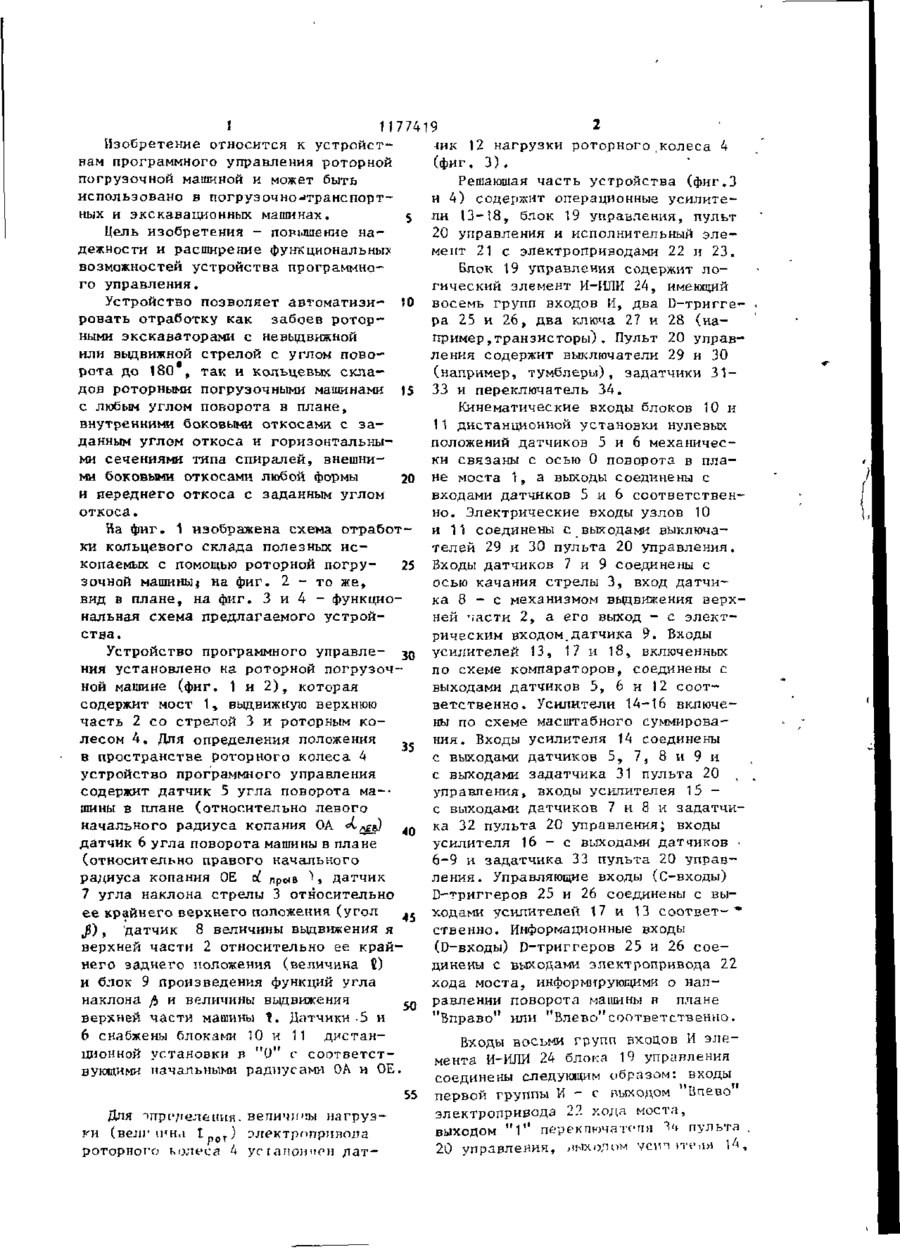
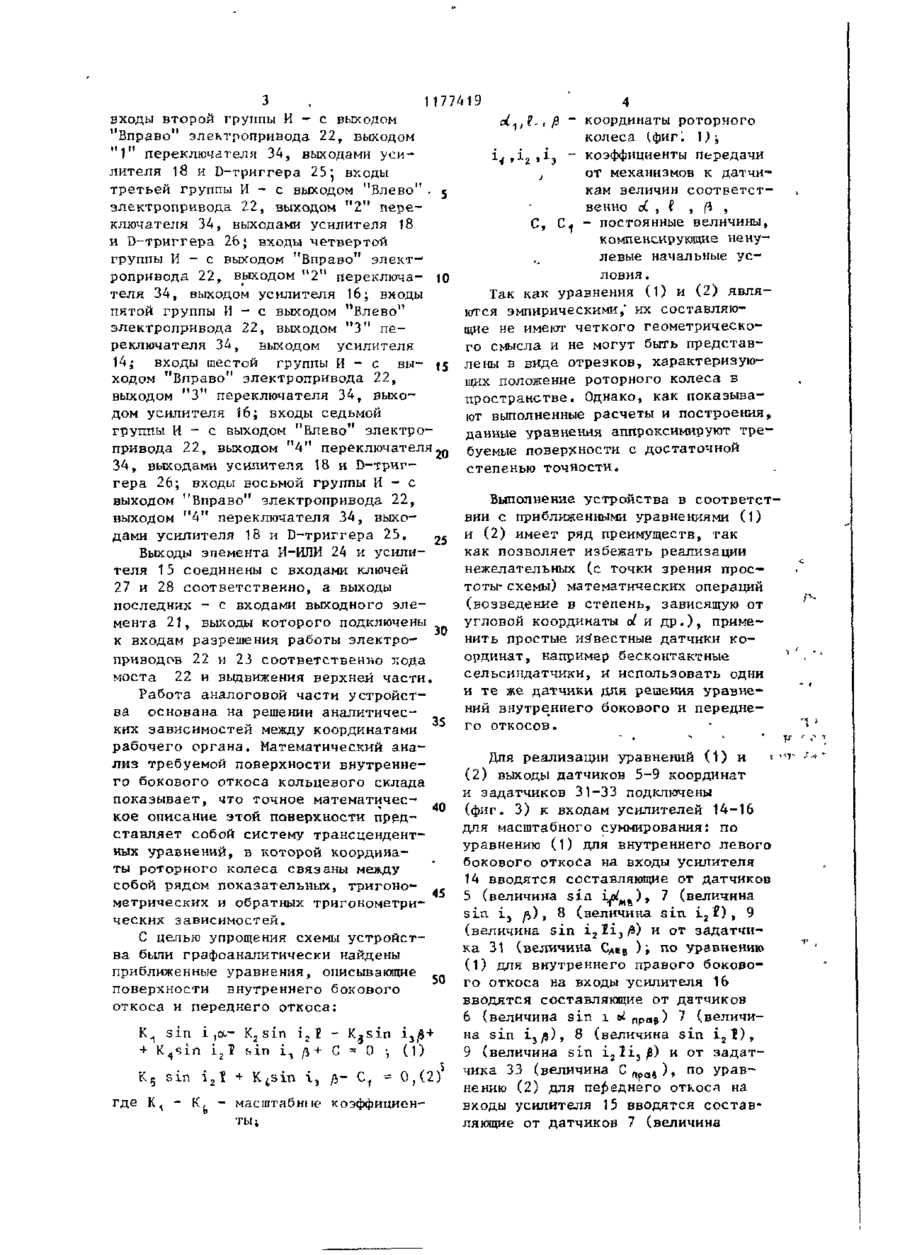
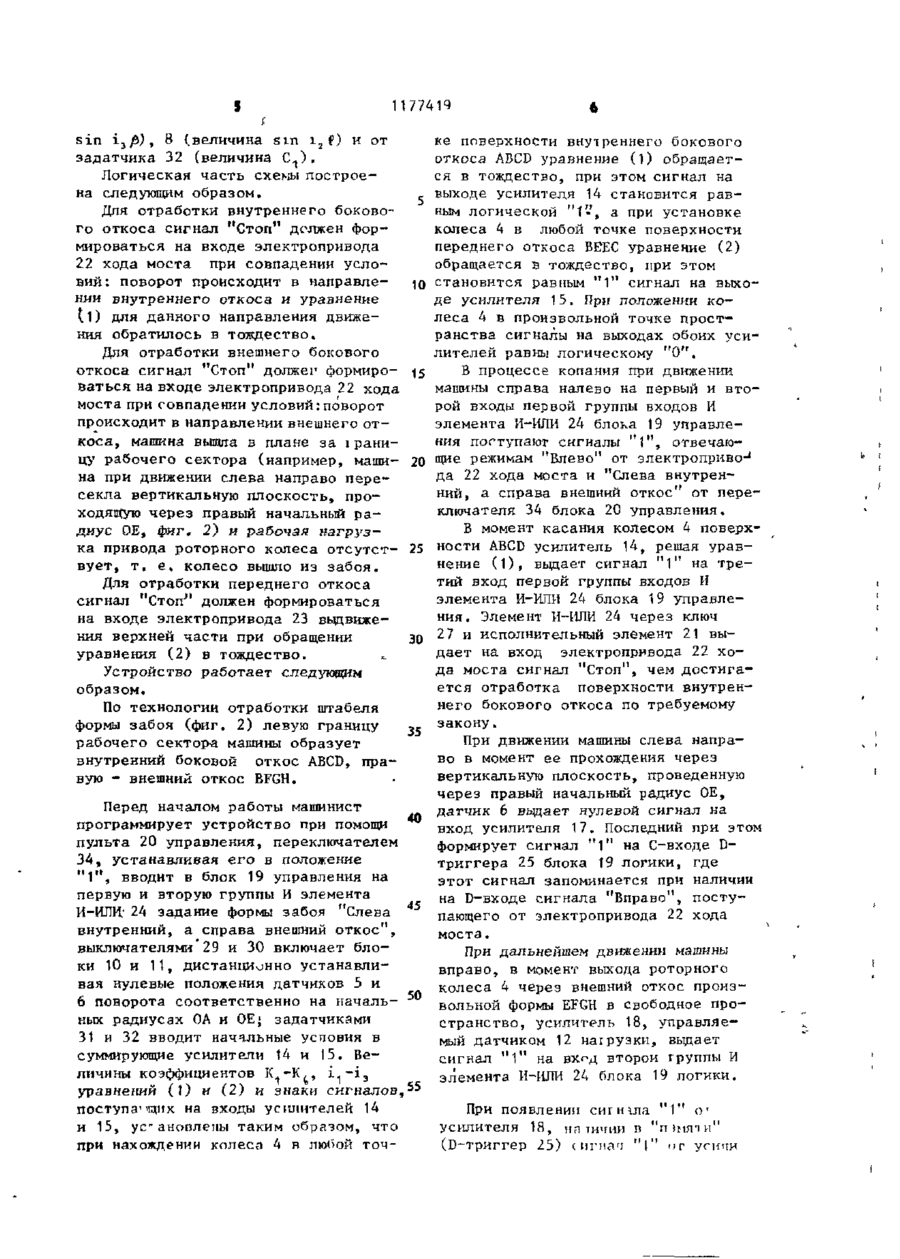
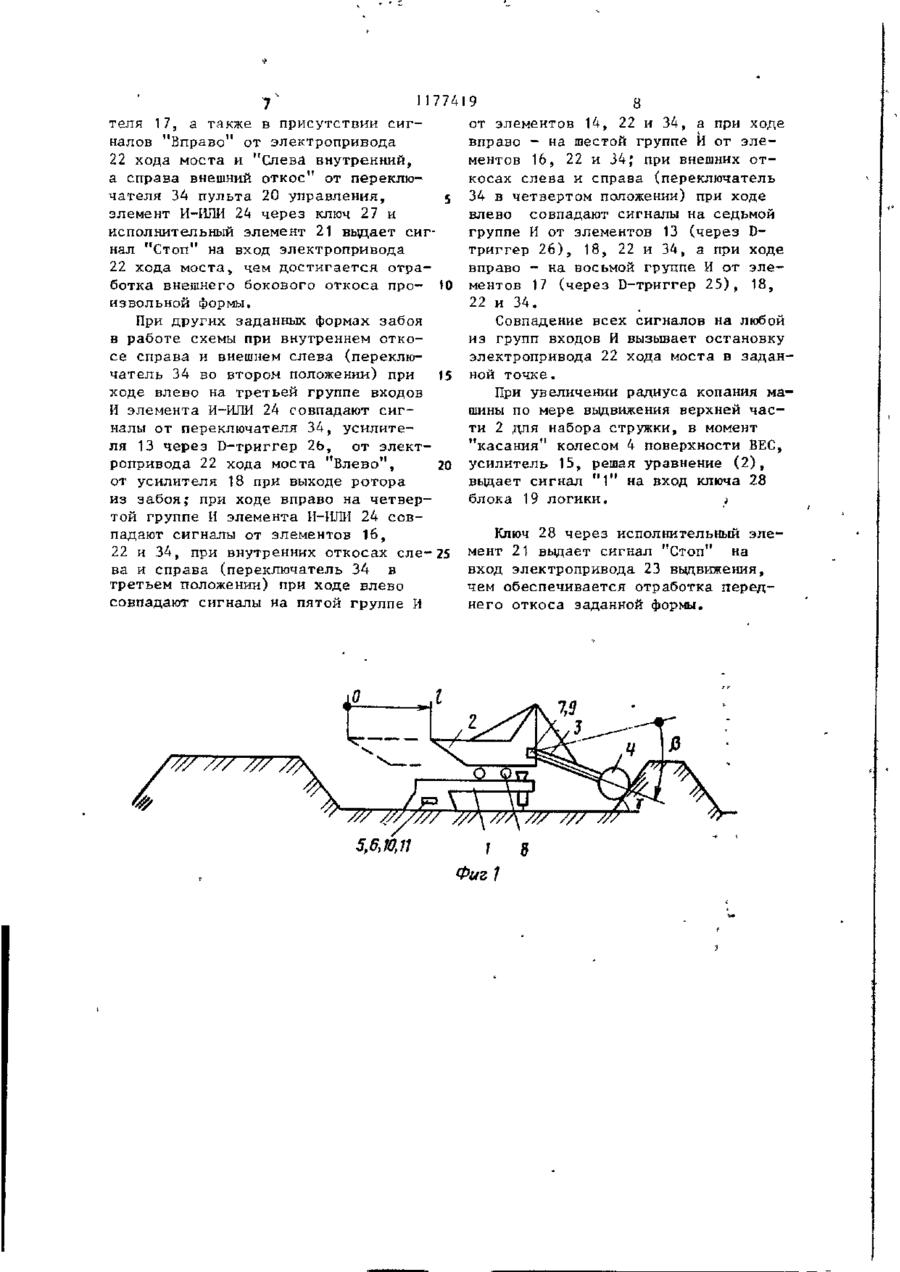
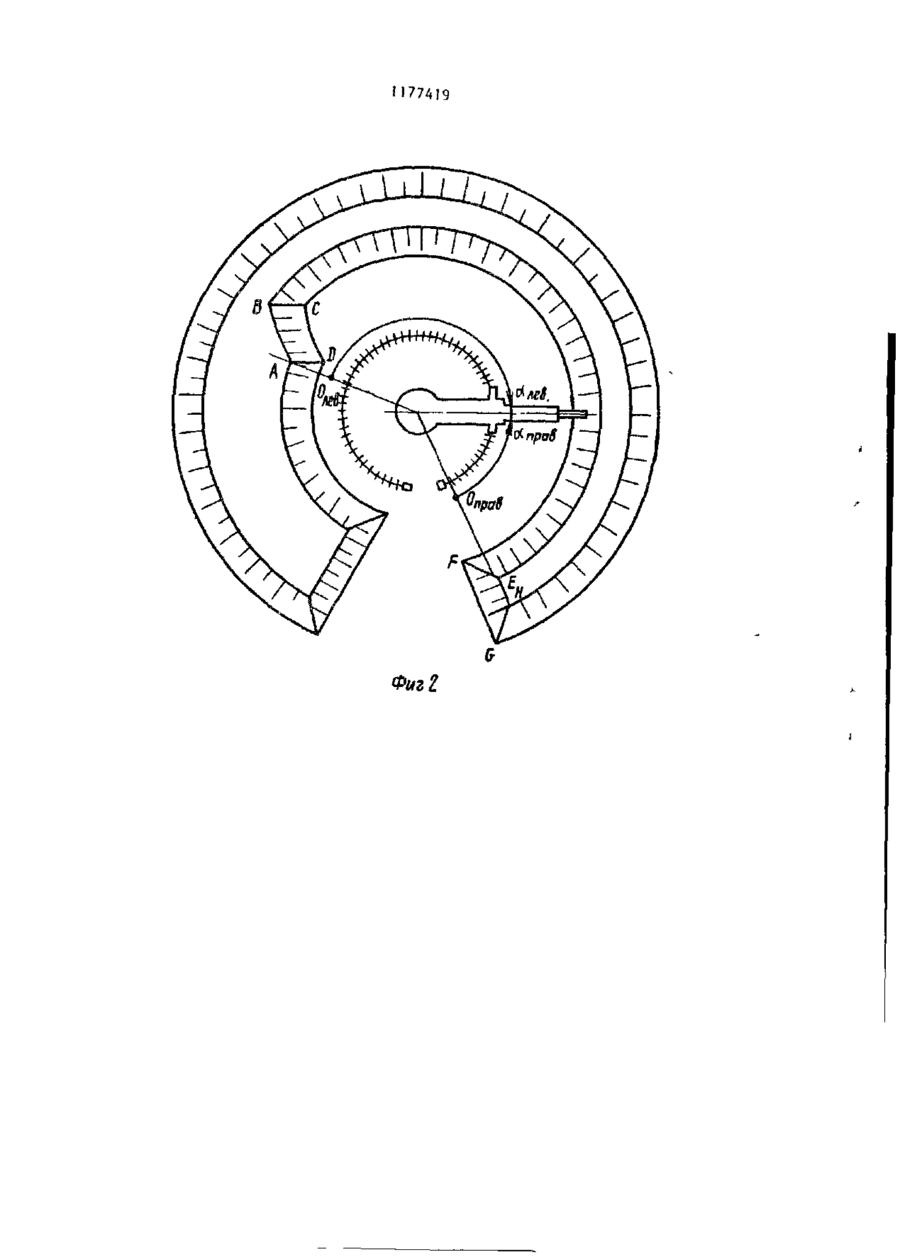
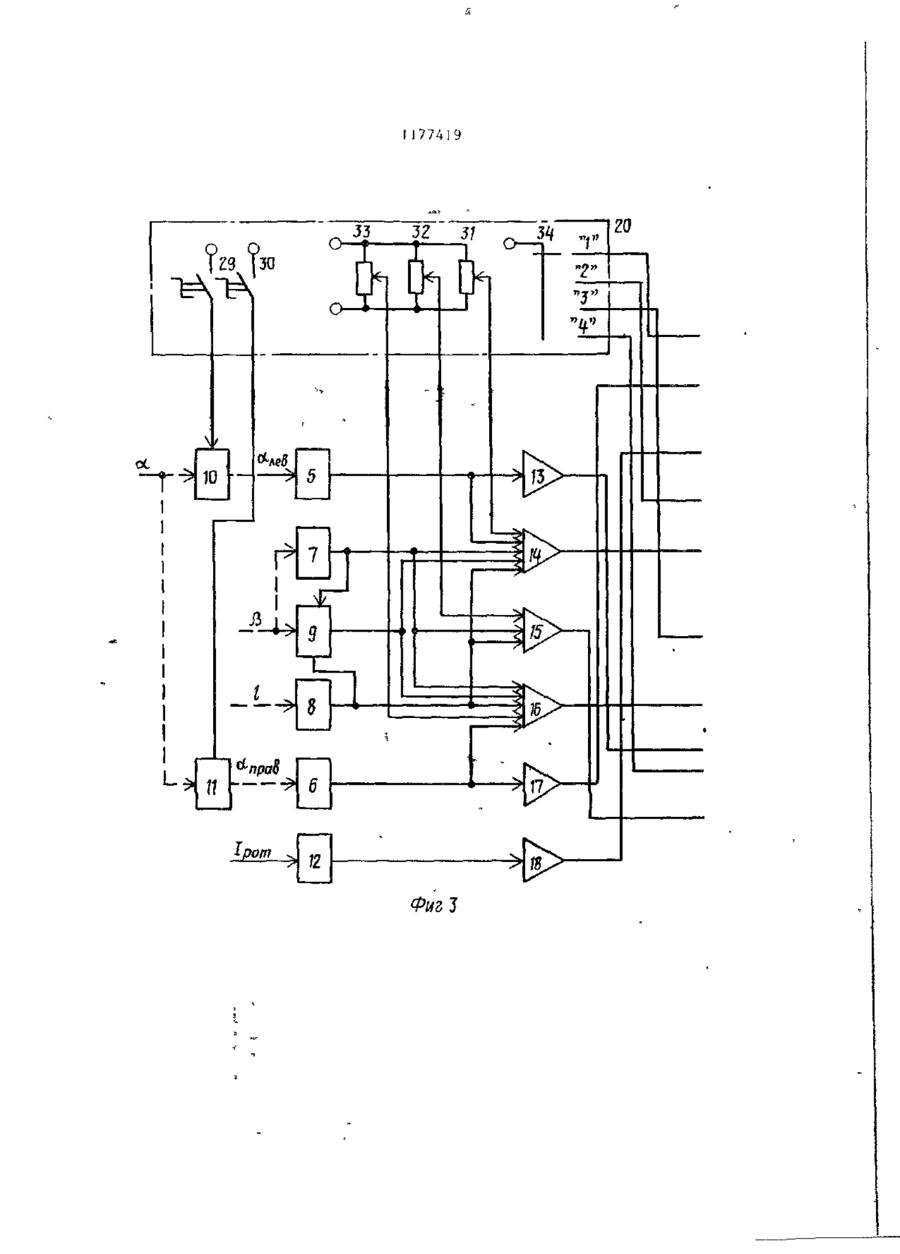
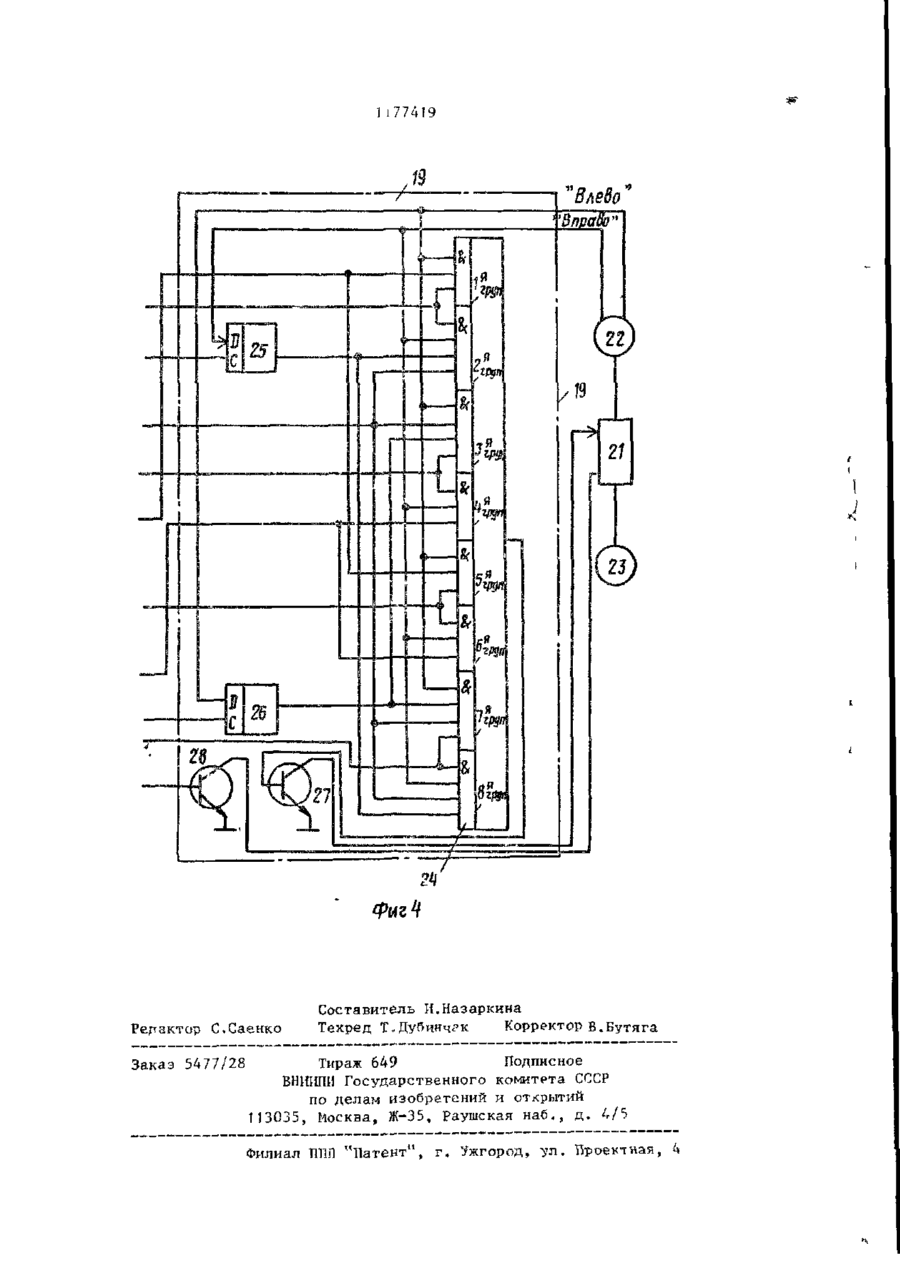
СОЮЗ СОВЕТСКИХ СОЦИАЛИСТИЧЕСКИХ РЕСПУБЛИК (19) (51)4 Е 02 F 3/26 ГОСУДАРСТВЕННЫЙ КОМИТЕТ СССР ПО ДЕЛАМ ИЗОБРЕТЕНИЙ И ОТКРЫТИЙ (21) 3722476/29-03 (22) 17.02.84 (46) 0 7 . 0 9 . 8 5 . Вюл. № 33 (72) В . С . Р о д н е н к о , О.М.Шляренко и Н.Я.Ничик (71) Донецкое п р о и з в о д с т в е н н о е о б ъ е динение по горному машиностроению "Донецкгормаы" (53) 6 2 1 . 8 7 9 . 4 8 ( 0 8 8 . 8 ) (56) Авторское с в и д е т е л ь с т в о СССР W 203034, к л . G 05 В 19/04, 1967. Авторское с в и д е т е л ь с т в о СССР № 8 7 0 5 9 6 , к л . Е 02 V 3/26, 1 9 7 9 . ( 5 4 ) ( 5 7 ) УСТРОЙСТВО ПРОГРАММНОГО УПРАВЛЕНИЯ РОТОРНОЙ ПОГРУЗОЧНОЙ МАШИНОЙ, содержащее д а т ч и к у г л а п о в о рота машины в п л а н е , датчик у г л а наклона с т р е л ы , д а т ч и к н а г р у з к и р о торного к о л е с а и блок у п р а в л е н и я , соединенный с исполнительным э л е ментов, о т л и ч а ю щ е е с я ^ тем, ч т о , с целью повышения надежности программного у п р а в л е н и я , оно снабжено дополнительным датчиком у г л а поворота машины в п л а н е , блоком определения произведения функции угла наклона и величины выдвижения верхней ч а с т и машины, датчиком в е л и чины выдвижения верхней части машины, блоками дистанционной у с т а н о в ки нуля, шестью операционными у с и л и телями и пультом у п р а в л е н и я , выполненным г І выключателей, переключателя и з а д а т ч и к о в , при этом выключ а т е л и подключены к узлам дистанционной у#1ізновки в " 0 м , которые с о е динены с соответствующим датчиком угла поворота машины в плане, выходы которых подключены к входам первого и пятого операционных усилителей, выход датчика наклона стрелы подключен к одному из входов блока определения произведения функций угла наклона и величины выдвижения верхей части машины и к первым входам второго, третьего и четвертого операционных усилителей, выход дат-1 чика величины выдвижения верхней части машины соединен с другим входом блока определения произведес ния функций угла наклона и величи& ны выдвижения верхней части машины и к вторым входам второго, третьего и четвертого операционных усилителей, третьи входы которых подключены к соответствующим задатчикам пульта управления, при этом четвертые входы второго и четвертого операционных усилителей подключены к выходу блока определения произведения функций угла наклона и величины ! выдвижения верхней части машины, пятые входы второго и четвертого операционных усилителей соединены с соответствующими датчиками угла поворота машины в плане, выходы операционных усилителей подключены к входам блока управления, другие входы которого соединены с переключателем пульта управления, информационные входы блока управления подключены к клеммам устройства "Влево1* "Вправо". 2 (0 2 ї 11774 19 Изобретение относится к устройст•шк 12 нагрузки роторного.колеса 4 вам программного управления роторной (фиг. 3 ) . погрузочной машиной и может быть Решающая часть устройства (фиг.З использовано в погруз очно-'транспорти 4) содержит операционные усилитеных и экскавационных машинах. 5 ли 13-18, блок 19 управления, пульт Цель изобретения - повышение на20 управления и исполнительный э л е дежности и расширение функциональны* мент 21 с электроприводами 22 и 23. возможностей устройства программноБлок 19 управления содержит лого управления. гический элемент И-ІШИ 24, имеющий Устройство позволяет автоматизи- 10 восемь групп входов И, два D-триггеровать отработку как забоев роторра 25 и 26, два ключа 27 и 28 (наными экскаваторами с невыдвижной пример, транзисторы). Пульт 20 управили выдвижной стрелой с углом поволения содержит выключатели 29 и 30 рота до 180 , так и кольцевых скла(например, тумблеры), задатчики 3 1 дов роторными погрузочными машинами 15 33 и переключатель 34. с любым углом поворота в плане, Кинематические входы блоков 10 и внутренними боковыми откосами с за\1 дистанционной установки нулевых данным углом откоса и горизонтальныположений датчиков 5 и 6 механичесми сечениями типа спиралей, внешники связаны с осью 0 поворота в плами боковыми откосами любой формы 20 не моста 1, а выходы соединены с и переднего откоса с заданным углом входами датчиков 5 и 6 соответственоткоса. но. Электрические входы узлов 10 На фиг. 1 изображена схема отработ- и 11 соединены с_выходами выключаки кольцевого склада полезных истелей 29 и 30 пульта 20 управления. копаемых с помощью роторной погру25 Входы датчиков 7 и 9 соединены с зочной машины^ на фиг. 2 - то же, осью качания стрелы 3, вход датчивид в плане, на фиг. 3 и 4 - функциока 8 - с механизмом выдвижения верхнальная схема предлагаемого устройней части 2, а его выход - с электства. рическим входом.датчика 9. Входы Устройство программного управле- JQ усилителей Ї З , 17 и 18, включенных ния установлено на роторной погрузочпо схеме компараторов, соединены с ной машине (фиг. 1 и 2 ) , которая выходами датчиков 5, 6 и 12 соотсодержит мост 1, выдвижную верхнюю ветственно . Усилители 14-16 включечасть 2 со стрелой 3 и роторным коны по схеме масштабного суммировалесом 4, Для определения положения ния. Входы усилителя 14 соединены 35 с выходами датчиков 5, 7, 8 и 9 и в пространстве роторного колеса 4 устройство программного управления с выходами задатчика 31 пульта 20 содержит датчик 5 угла поворота мауправления, входы усилителея 15 шины в плане (относительно левого с выходами датчиков 7 и 8 и задатчиначального радиуса копания ОА ), 8 (величина sin і 2 ї ) , 9 ческих зависимостей. (величина sin і2їі3/ї) и от задатчнС целью упрощения схемы устройстка 31 (величина С^«в ) ; по уравнению ва были графоаналитически найдены (1) для внутреннего правого боковоприближенные уравнения, описывающие 50 го откоса на входы усилителя 16 поверхности внутреннего бокового вводятся составляющие от датчиков откоса и переднего откоса: 6 (величина sin i d r,pMe) 7 (величиК^ sin і ,оі- К2 sin і 2 ї - K,sin Ї3/ї+ на sin i3 /5), 8 (величина sin іг t ) , + K 4 sin i 2 T sin і, /j+ С » 0 ; (1) 9 (величина sin i z li 3 £) и от задатчика 33 (величина С п р а в ) , по уравK g sin i 2 t + K t sin i 3 /і- С 1 = 0,(2) нению (2) для переднего откоса на где Кл - К; - масштабні w коэффициенвходы усилителя 15 вводятся составты! ляющие от датчиков 7 (величина 1177414 sin i 3 /Э) , 8 (.величина sin i2 f) и от задатчика 32 (величина С 1 ) . Логическая часть схемы построена следующем образом. Для отработки внутреннего бокового откоса сигнал "Стоп" должен формироваться на входе электропривода 22 хода моста при совпадении условий: поворот происходит в направлекии внутреннего откоса и уравнение (і) для данного направления движения обратилось в тождество. Для отработки внешнего бокового откоса сигнал "Стоп" должег формироваться на входе электропривода 22 хода моста при совпадении условий:поворот происходит в направлении внешнего откоса, машина вышла в плане за іраницу рабочего сектора (например, машина при движении слева направо пересекла вертикальную плоскость, проходяиСую через правый начальный радиус ОЕ, фиг. 2) и рабочая нагрузка привода роторного колеса отсутствует, т. е, колесо вышло из забоя. Для отработки переднего откоса сигнал "Стоп" должен формироваться на входе электропривода 23 выдвижения верхней части при обращении уравнения (2) в тождество. Устройство работает следующим образом. По технологии отработки штабеля формы забоя (фиг. 2) левую границу рабочего сектора машины образует внутренний боковой откос ABCD, правую - внешний откос BFGH. ке поверхности внутреннего бокового откоса ABCD уравнение (1) обращается в тождество, при этом сигнал на _ выходе усилителя 14 становится равным логической "1", а при установке колеса 4 в любой точке поверхности переднего откоса ВЕЕС уравнение (2) обращается в тождество, при этом 1 і о становится равным " Г сигнал на выходе усилителя 15. При положении колеса 4 в произвольной точке пространства сигналы на выходах обоих усилителей равны логическому "0". 15 В процессе копания при движении машины справа налево на первый и второй входы первой группы входов И элемента И-ИЛИ 24 блока 19 управления поступают сигналы "1", отвечаю20 щие режимам "Влево" от электропривод да 22 хода моста и "Слева внутренний, а справа внешний откос" от переключателя 34 блока 20 управления. В момент касания колесом 4 поверх25 ности ABCD усилитель 14, решая уравнение (1), выдает сигнал "і" на третий вход первой группы входов И элемента И-ИЛИ 24 блока 19 управления. Элемент И-ИЛИ 24 через ключ 30 27 и исполнительный элемент 21 выдает на вход электропривода 22 хода моста сигнал "Стоп", чем достигается отработка поверхности внутреннего бокового откоса по требуемому закону. 35 При движении машины слева направо в момент ее прохождения через вертикальную плоскость, проведенную через правый начальный радиус ОЕ, Перед началом работы машинист датчик 6 вьщает нулевой сигнал на программирует устройство при помощи 40 вход усилителя 17. Последний при этом пульта 20 управления, переключателем формирует сигнал " Г 1 на С-входе Dтриггера 25 блока 19 логики, где 34, устанавливая его в положение этот сигнал запоминается при наличии "і", вводит в блок 19 управления на на D-входе сигнала "Вправо", поступервую и вторую группы И элемента пающего от электропривода 22 хода И-ИЛИ; 24 задание формы забоя "Слева моста. внутренний, а справа внешний откос", выключателями*29 и 30 включает блоПри дальнейшем движении машины ки 10 и 11, дистанционно устанавливправо, в момент выхода роторного вая нулевые положения датчиков 5 и колеса 4 через внешний откос произ6 поворота соответственно на началь- 50 вольной формы EFGH в свободное проных радиусах ОА и ОЕ; задатчиками странство, усилитель 18, управляемый датчиком 12 нагрузки, выдает 31 и 32 вводит начальные условия в сигнал " 1 " на вхг>д второй группы И суммирующие усилители 14 и 15. Веэлемента И-ИЛИ 24 блока 19 логики. личины коэффициентов К -К,, і1 —і з уравнений (I) и (2) и знаки сигналов,55 поступающих на входы усилителей 14 При появлении сиг ш л а " 1 " с и 15, усаноплены таким образом, что усилителя 18, нптичий п "пімпіи" при нахождении колеса 4 в любой точ(D-триггер 25) с игнач "1" иг усипи 7^ "774 9 теля 17, а также в присутствии сигналов "Вправо" от электропривода 22 хода моста и "Слева внутренний, а справа внешний откос" от переключателя 34 пульта 20 управления, 5 элеме нт И-ИЛИ 24 чер ез ключ 27 и исполнительный элемент 21 выдает сигнал "Стоп" на вход электропривода 22 хода моста, чем достигается отработка внешнего бокового откоса про- 10 извольной формы. 8 от элементов 14, 22 и 34, а при ходе вправо - на шестой группе И от элементов 16, 22 и 34; при внешних откосах слева и справа (переключатель 34 в четвертом положении) при ходе влево совпадают сигналы на седьмой группе И от элементов 13 (через Dтриггер 26), 18, 22 и 34, а при ходе вправо - на восьмой группе И от элементов 17 (через D-триггер 25), 18, 22 и 34. Совпадение всех сигналов на любой из групп входов И вызывает остановку электропривода 22 хода моста в заданной точке. При увеличении радиуса копания машины по мере выдвижения верхней части 2 для набора стружки, в момент "касания" колесом 4 поверхности ВЕС, усилитель 15, решая уравнение (2), выдает сигнал "1" на вход ключа 28 блока 19 логики. І При других заданных формах забоя в работе схемы при внутреннем откосе справа и внешнем слева (переключатель 34 во втором положении) при )5 ходе влево на третьей группе входов И элемента И-ИЛИ 24 совпадают сигналы от переключателя 34, усилителя 13 через D-триггер 2b, от электропривода 22 хода моста "Влево", 20 от усилителя 18 при выходе ротора из забоя; при ходе вправо на четвертой группе И элемента И-ИЛИ 24 совпадают сигналы от элементов 16, Ключ 28 через исполнительный эле22 и 34, при внутренних откосах еле-25 мент 21 выдает сигнал "Стоп" на ва и справа (переключатель 34 в вход электропривода 23 выдвижения, третьем положении) при ходе влево чем обеспечивается отработка передсовпадают сигналы на пятой группе И него откоса заданной формы. 5,6,10,11 Фиг 1 П774І9 Фиг I I 177419 Фиг! 1177419 Редактор С.Саенко Заказ 5477/28 Составитель И.Назаркина Техред Т.Дубннч^к Корректор В,Бутяга Тираж 649 Подписное ВНИШ1І1 Государственного комитета СССР по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб,, д . 4/5 Филиал ШП "Патент", г. Ужгород, ул. Проектная, 4 1
ДивитисяДодаткова інформація
Назва патенту англійськоюDevice for programmed control of rotor loading machine
Автори англійськоюRodnenko volodymyr Stefanovych, Shkiarenko Oleh Maiorovych
Назва патенту російськоюУстройство программного управления роторной погрузочной машиной
Автори російськоюРодненко Владимир Стефанович, Шкляренко Олег Майорович
МПК / Мітки
МПК: E02F 3/18
Мітки: управління, навантажувальною, пристрій, роторною, програмного, машиною
Код посилання
<a href="https://ua.patents.su/8-8575-pristrijj-programnogo-upravlinnya-rotornoyu-navantazhuvalnoyu-mashinoyu.html" target="_blank" rel="follow" title="База патентів України">Пристрій програмного управління роторною навантажувальною машиною</a>
Пристрій автоматичного управління виїмковою машиною
Номер патенту: 7597
Опубліковано: 29.09.1995
Автори: Кіріченко Костянтин Іванович, Клименко Володимир Іванович, Бакуменко Володимир Степанович, Сірченко Володимир Миколайович, Захаров Володимир Миколаєвич
МПК: E21C 35/24
Мітки: автоматичного, машиною, виїмковою, пристрій, управління
Формула / Реферат:
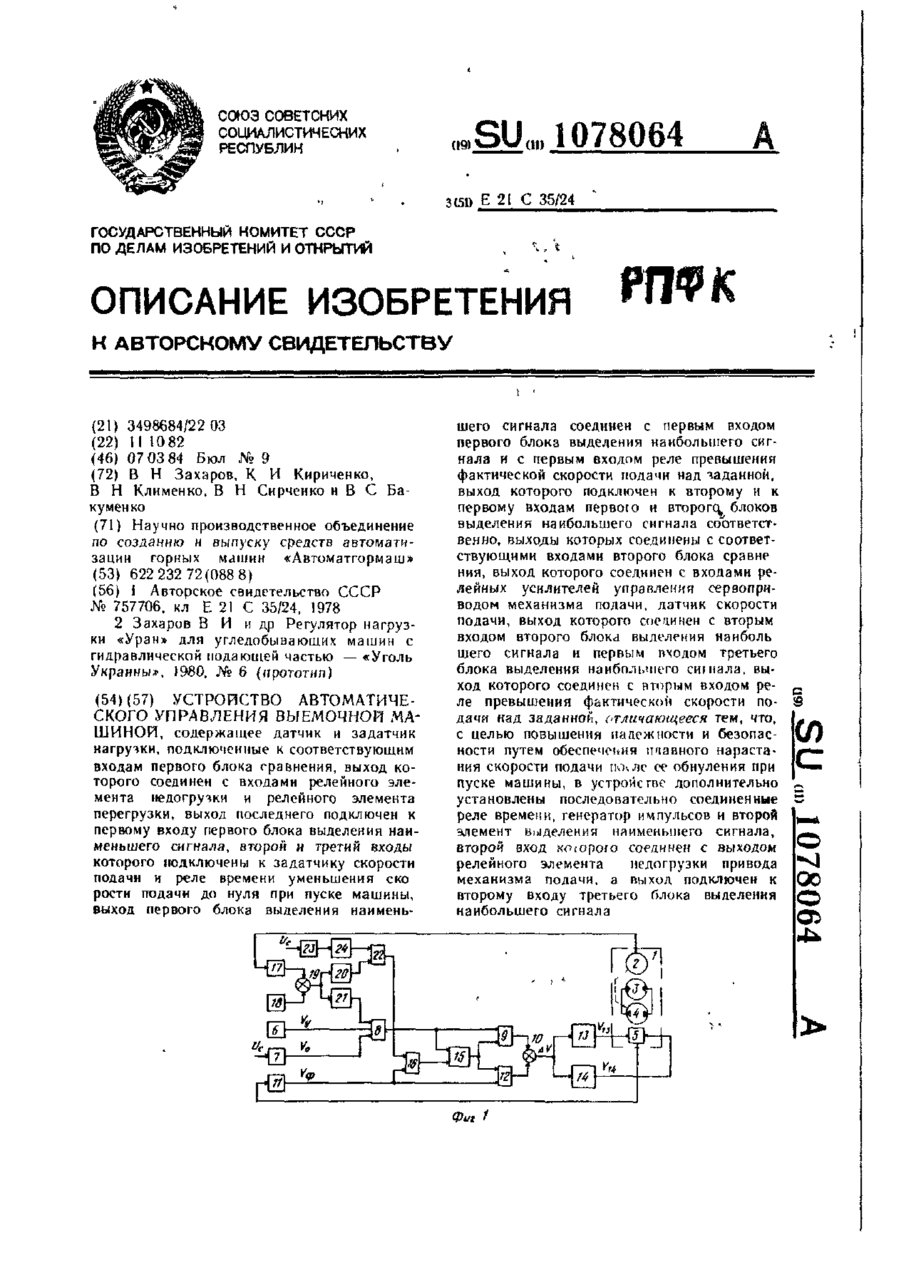
Устройство автоматического управления выемочной машиной, содержащее датчик и задатчик нагрузки, подключенные к соответствующим входам первого блока сравнения, выход которого соединен с входами релейного элемента недогрузки и релейного элемента перегрузки, выход последнего подключен к первому входу первого блока выделения наименьшего сигнала, второй и третий входы которого подключены к задатчику скорости подачи и реле времени уменьшения...
Пристрій управління машиною для контактного стикового зварювання оплавленням

Номер патенту: 314
Опубліковано: 30.04.1993
Автори: Кучук-Яценко Сергій Іванович, Горишняков Олексій Іванович, Лазебний Іван Леонтійович, Богорський Михайло Володимирович, Кривенко Валерій Георгійович
МПК: B23K 11/04
Мітки: машиною, контактного, зварювання, управління, стикового, оплавленням, пристрій
Формула / Реферат:
(57) Устройство управления машиной для контактной стыковой сварки оплавлением, содержащее сварочный трансформатор, в его первичную обмотку включен датчик сварочного тока, соединенный с электрогидравлическим приводом перемещения плиты машины через блок управления приводом, отличающееся тем, что, с целью повышения производительности процесса сварки за счет сокращения времени на его протекание и повышения качества сварного соединения за счет...
Пристрій автоматичного управління виїмковою машиною
Номер патенту: 7594
Опубліковано: 29.09.1995
Автори: Сілаєв Віктор Іванович, Зубков Леонід Олексійович, Захаров Володимир Миколаєвич, Заболотний Микола Григорович
МПК: E21C 35/24
Мітки: машиною, пристрій, управління, виїмковою, автоматичного
Текст:
...19 и перегрузки 20 электропривода комбайна. Выходы этих элементов подключены соответственно к элементам 15 и 1, Релейный элемент 19 осуществляет контроль недогрузки привода и обеспечивает релейное (непрерывное ) увеличение скорости подачи, если отклонение нагрузки ниже первого порогового значения, а импульсный, если отклонение нагрузки больше этого значения, но меньше второго порогового значения отклонения нагрузки. В последнем случае...
Пристрій автоматичного програмного управління процесом контактного стикового зварювання оплавленням
Номер патенту: 402
Опубліковано: 30.04.1993
Автори: Толдін Анатолій Андрійович, Кривенко Валерій Георгійович, Богорський Михайло Володимирович, Боровой Валентин Михайлович, Кучук-Яценко Сергій Іванович
МПК: B23K 11/04
Мітки: пристрій, стикового, автоматичного, процесом, оплавленням, управління, програмного, контактного, зварювання
Формула / Реферат:
Формула изобретенияУстройство для автоматического программного управления процессом контактной стыковой сварки оплавлением, содержащее подвижную и неподвижную станины машины, соединительный узел привода перемещения подвижной станины машины и привод ее осадки датчик перемещения подвижной станины машины, сварочный трансформатор, устройство программного управления и последовательно соединенные датчик электрической мощности, включенный в...
Пристрій управління самохідною сільськогосподарською машиною
Номер патенту: 7747
Опубліковано: 26.12.1995
Автори: Кузьмінов Вадим Георгійович, Завгородній Віталій Євгенович, Соболєв Анатолій Ігорович, Умеренко Аркадій Аркадійович, Русанов Іван Іванович, Анюхін Володимир Михайлович
МПК: A01B 69/04
Мітки: пристрій, самохідною, управління, машиною, сільськогосподарською
Формула / Реферат:
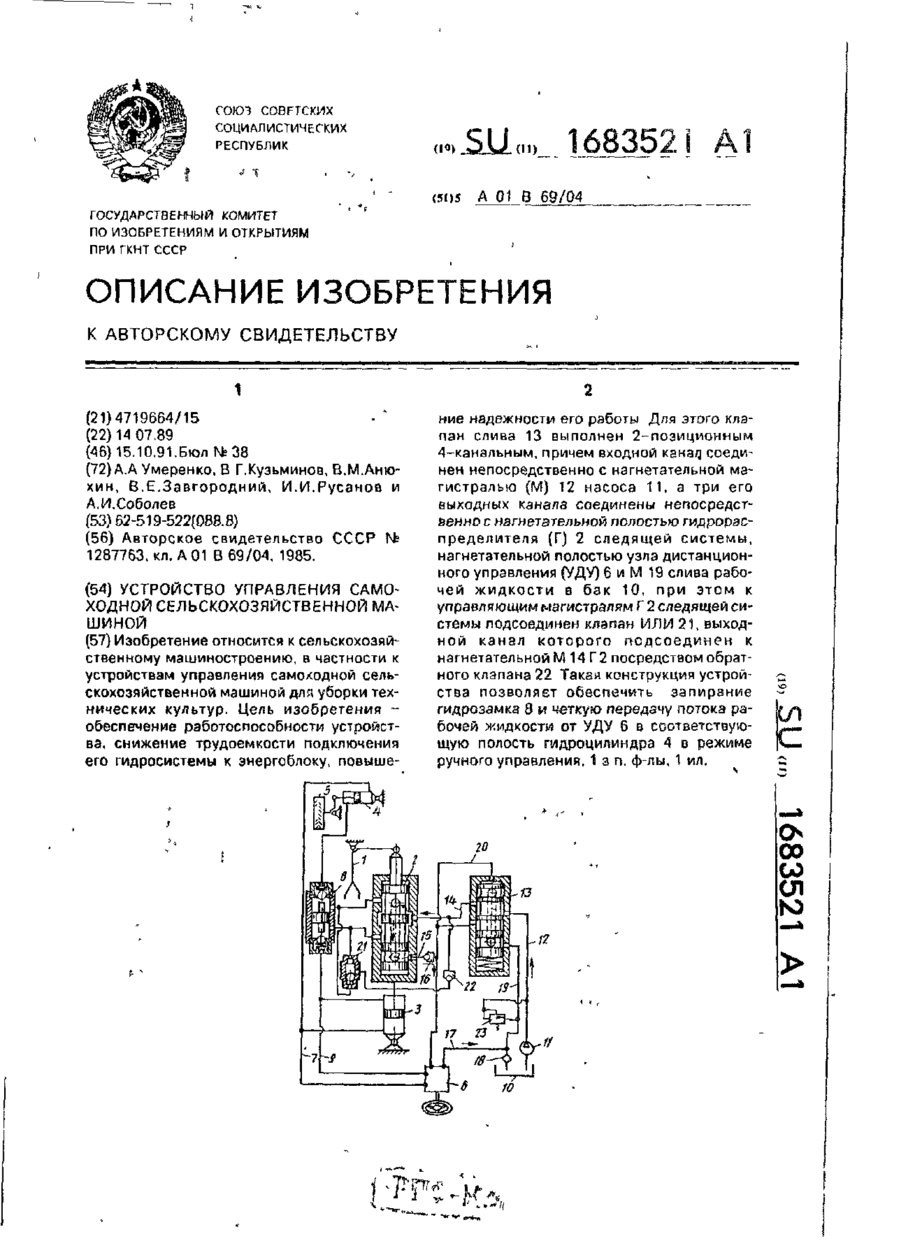
1. Устройство управления самоходной сельскохозяйственной машиной, содержащее следящую систему с копирующими щупами, гидрораспределителем и гидроцилиндром управляемых колес, узел дистанцонного управления, клапан слива рабочей жидкости и гидроцилиндр обратной связи, отличающееся тем, что, с целью обеспечения работоспособности устройства и снижения трудоемкости подключения его гидросистемы к энергоблоку клапан слива выполнен...
Попередній патент: Пристрій для фіксації фрагментів трубчастих кісток
Наступний патент: Баластова система плавучого доку
Випадковий патент: Машина для очищення зерна