Двомоторний безпілотний літальний апарат
Номер патенту: 40288
Опубліковано: 25.03.2009
Автори: Харченко Володимир Петрович, Кулик Микола Сергійович, Матійчик Михайло Петрович

Формула / Реферат
1. Двомоторний безпілотний літальний апарат, що містить підняте над гондолою на двох пілонах прямокутне у плані крило, тягнучу та штовхаючу силові установки, причому тягнуча перенесена на лінію половини розмаху крила впритул до його передньої кромки, також містить зворотне V-подібне хвостове оперення з додатковим вертикальним кілем, що встановлене на одній балці, закріпленій на лінії половини розмаху крила у верхній частині його профілю, який відрізняється тим, що крило виконане стрілоподібним і трапецієподібним у плані і встановлене на одному центральному пілоні, силові установки виконані в аеродинамічних кільцях і змінюють свій вектор тяги, а зворотне V-подібне хвостове оперення виконано без додаткового кіля.
2. Двомоторний безпілотний літальний апарат за п. 1, який відрізняється тим, що може бути виконаний одномоторним з тягнучою силовою установкою або одномоторним з штовхаючою силовою установкою.
Текст
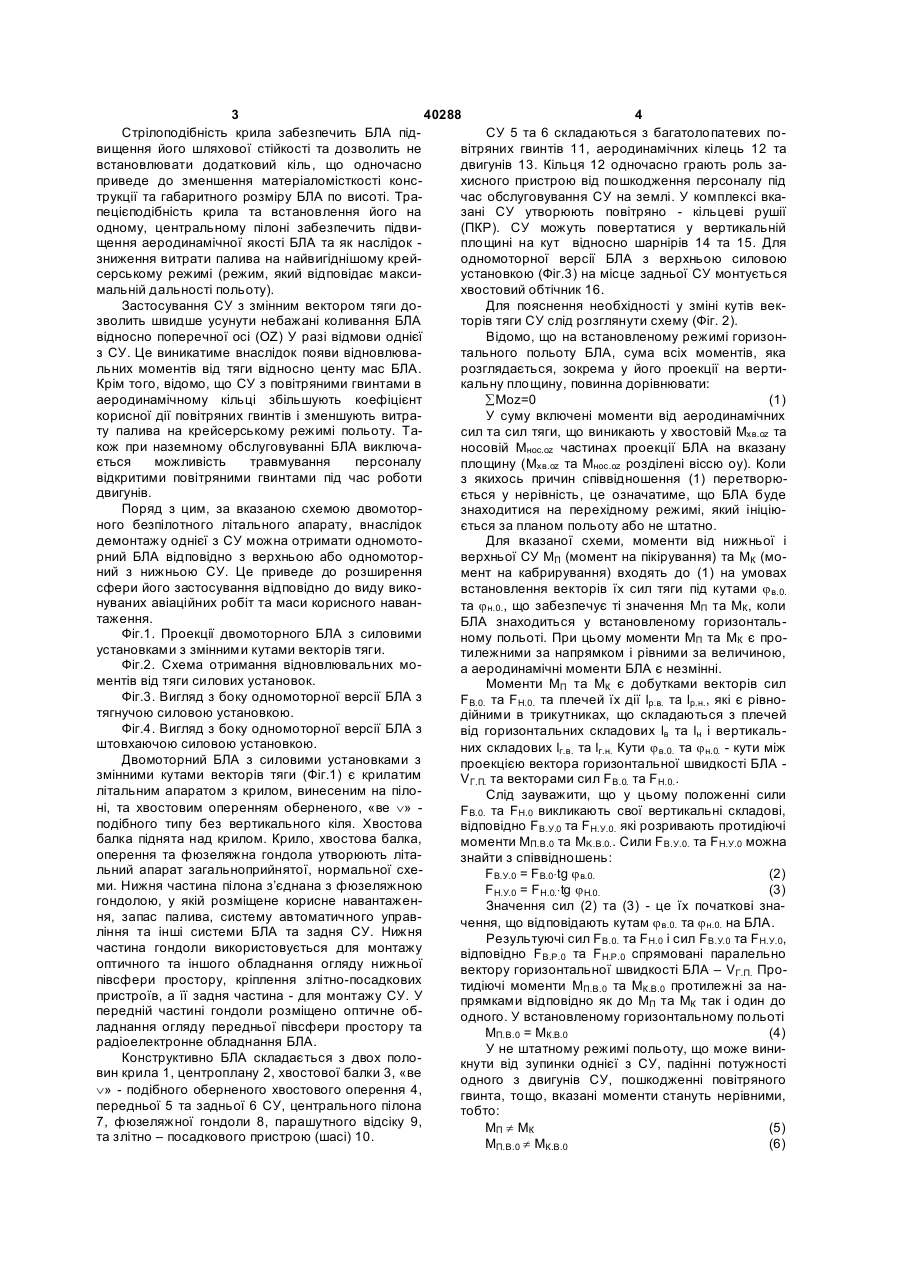
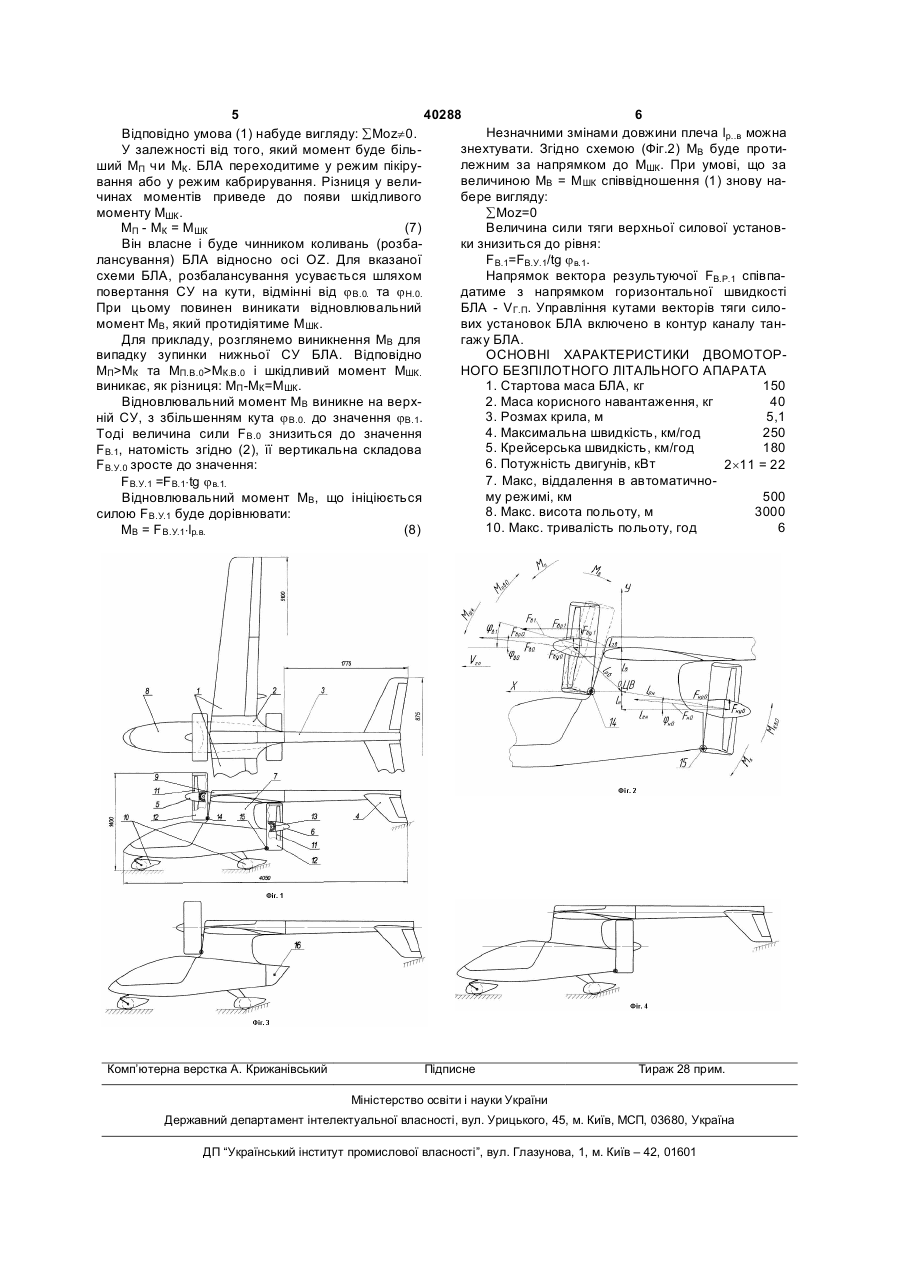
1. Двомоторний безпілотний літальний апарат, що містить підняте над гондолою на двох пілонах прямокутне у плані крило, тягнучу та штовхаючу силові установки, причому тягнуча перенесена на лінію половини розмаху крила впритул до його передньої кромки, також містить 3 40288 4 СУ 5 та 6 складаються з багатолопатевих поСтрілоподібність крила забезпечить БЛА підвітряних гвинтів 11, аеродинамічних кілець 12 та вищення його шляхової стійкості та дозволить не двигунів 13. Кільця 12 одночасно грають роль завстановлювати додатковий кіль, що одночасно хисного пристрою від пошкодження персоналу під приведе до зменшення матеріаломісткості консчас обслуговування СУ на землі. У комплексі вкатрукції та габаритного розміру БЛА по висоті. Тразані СУ утворюють повітряно - кільцеві рушії пецієподібність крила та встановлення його на (ПКР). СУ можуть повертатися у вертикальній одному, центральному пілоні забезпечить підвиплощині на кут відносно шарнірів 14 та 15. Для щення аеродинамічної якості БЛА та як наслідок одномоторної версії БЛА з верхньою силовою зниження витрати палива на найвигіднішому крейустановкою (Фіг.3) на місце задньої СУ монтується серському режимі (режим, який відповідає максихвостовий обтічник 16. мальній дальності польоту). Для пояснення необхідності у зміні кутів векЗастосування СУ з змінним вектором тяги доторів тяги СУ слід розглянути схему (Фіг. 2). зволить швидше усунути небажані коливання БЛА Відомо, що на встановленому режимі горизонвідносно поперечної осі (OZ) У разі відмови однієї тального польоту БЛА, сума всіх моментів, яка з СУ. Це виникатиме внаслідок появи відновлюварозглядається, зокрема у його проекції на вертильних моментів від тяги відносно центу мас БЛА. кальну площину, повинна дорівнювати: Крім того, відомо, що СУ з повітряними гвинтами в аеродинамічному кільці збільшують коефіцієнт åMoz=0 (1) корисної дії повітряних гвинтів і зменшують витраУ суму включені моменти від аеродинамічних ту палива на крейсерському режимі польоту. Тасил та сил тяги, що виникають у хвостовій Mxв.oz та кож при наземному обслуговуванні БЛА виключаносовій Mнoc.oz частинах проекції БЛА на вказану ється можливість травмування персоналу площину (Мxв.oz та Мнос.oz розділені віссю оу). Коли відкритими повітряними гвинтами під час роботи з якихось причин співвідношення (1) перетворюдвигунів. ється у нерівність, це означатиме, що БЛА буде Поряд з цим, за вказаною схемою двомоторзнаходитися на перехідному режимі, який ініціюного безпілотного літального апарату, внаслідок ється за планом польоту або не штатно. демонтажу однієї з СУ можна отримати одномотоДля вказаної схеми, моменти від нижньої і рний БЛА відповідно з верхньою або одномоторверхньої СУ MП (момент на пікірування) та МК (моний з нижньою СУ. Це приведе до розширення мент на кабрирування) входять до (1) на умовах сфери його застосування відповідно до виду виковстановлення векторів їх сил тяги під кутами jв.0. нуваних авіаційних робіт та маси корисного наванта jн.0., що забезпечує ті значення MП та МК, коли таження. БЛА знаходиться у встановленому горизонтальФіг.1. Проекції двомоторного БЛА з силовими ному польоті. При цьому моменти МП та МК є проустановками з змінними кутами векторів тяги. тилежними за напрямком і рівними за величиною, Фіг.2. Схема отримання відновлювальних моа аеродинамічні моменти БЛА є незмінні. ментів від тяги силових установок. Моменти МП та МК є добутками векторів сил Фіг.3. Вигляд з боку одномоторної версії БЛА з FB.0. та FН.0. та плечей їх дії lр.в. та lр.н., які є рівнотягнучою силовою установкою. дійними в трикутниках, що складаються з плечей Фіг.4. Вигляд з боку одномоторної версії БЛА з від горизонтальних складових lв та lн і вертикальштовхаючою силовою установкою. них складових lг.в. та lг.н. Кути jв.0. та jн.0. - кути між Двомоторний БЛА з силовими установками з проекцією вектора горизонтальної швидкості БЛА змінними кутами векторів тяги (Фіг.1) є крилатим VГ.П. та векторами сил FB.0. та FН.0.. літальним апаратом з крилом, винесеним на пілоСлід зауважити, що у цьому положенні сили ні, та хвостовим оперенням оберненого, «ве Ú» FB.0. та FH.0 викликають свої вертикальні складові, подібного типу без вертикального кіля. Хвостова відповідно FB.У.0 та FН.У.0. які розривають протидіючі балка піднята над крилом. Крило, хвостова балка, моменти МП.В.0 та MK.B.0.. Сили FB.У.0. та FH.У.0 можна оперення та фюзеляжна гондола утворюють літазнайти з співвідношень: льний апарат загальноприйнятої, нормальної схеFB.У.0 = FB.0×tg jв.0. (2) ми. Нижня частина пілона з’єднана з фюзеляжною FH.У.0 = F H.0.×tg jН.0. (3) гондолою, у якій розміщене корисне навантаженЗначення сил (2) та (3) - це їх початкові знаня, запас палива, систему автоматичного управчення, що відповідають кутам jв.0. та jн.0. на БЛА. ління та інші системи БЛА та задня СУ. Нижня Результуючі сил FВ.0. та FН.0 і сил FB.У.0 та FН.У.0, частина гондоли використовується для монтажу відповідно FB.Р.0 та FН.Р.0 спрямовані паралельно оптичного та іншого обладнання огляду нижньої вектору горизонтальної швидкості БЛА – VГ.П. Пропівсфери простору, кріплення злітно-посадкових тидіючі моменти MП.В.0 та МК.В.0 протилежні за напристроїв, а її задня частина - для монтажу СУ. У прямками відповідно як до MП та МК так і один до передній частині гондоли розміщено оптичне ободного. У встановленому горизонтальному польоті ладнання огляду передньої півсфери простору та МП.В.0 = МК.В.0 (4) радіоелектронне обладнання БЛА. У не штатному режимі польоту, що може виниКонструктивно БЛА складається з двох полокнути від зупинки однієї з СУ, падінні потужності вин крила 1, центроплану 2, хвостової балки 3, «ве одного з двигунів СУ, пошкодженні повітряного Ú» - подібного оберненого хвостового оперення 4, гвинта, тощо, вказані моменти стануть нерівними, передньої 5 та задньої 6 СУ, центрального пілона тобто: 7, фюзеляжної гондоли 8, парашутного відсіку 9, МП ¹ МК (5) та злітно – посадкового пристрою (шасі) 10. МП.В.0 ¹ МК.В.0 (6) 5 40288 6 Незначними змінами довжини плеча lp..в можна Відповідно умова (1) набуде вигляду: åМоz¹0. знехтувати. Згідно схемою (Фіг.2) МВ буде протиУ залежності від того, який момент буде більлежним за напрямком до МШК. При умові, що за ший MП чи МК. БЛА переходитиме у режим пікірувеличиною МВ = МШК співвідношення (1) знову навання або у режим кабрирування. Різниця у велибере вигляду: чинах моментів приведе до появи шкідливого åMoz=0 моменту МШК. Величина сили тяги верхньої силової установМП - МК = МШК (7) ки знизиться до рівня: Він власне і буде чинником коливань (розбалансування) БЛА відносно осі OZ. Для вказаної FB.1=FB.У.1/tg jв.1. схеми БЛА, розбалансування усувається шляхом Напрямок вектора результуючої FВ.Р.1 співпаповертання СУ на кути, відмінні від jВ.0. та jН.0. датиме з напрямком горизонтальної швидкості При цьому повинен виникати відновлювальний БЛА - VГ.П. Управління кутами векторів тяги силомомент МВ, який протидіятиме МШК. вих установок БЛА включено в контур каналу танДля прикладу, розглянемо виникнення МВ для гажу БЛА. випадку зупинки нижньої СУ БЛА. Відповідно ОСНОВНІ ХАРАКТЕРИСТИКИ ДВОМОТОРМП>МК та МП.В.0>МК.В.0 і шкідливий момент МШК. НОГО БЕЗПІЛОТНОГО ЛІТАЛЬНОГО АПАРАТА виникає, як різниця: МП -МК=МШК. 1. Стартова маса БЛА, кг 150 Відновлювальний момент МВ виникне на верх2. Маса корисного навантаження, кг 40 3. Розмах крила, м 5,1 ній СУ, з збільшенням кута jВ.0. до значення jВ.1. 4. Максимальна швидкість, км/год 250 Тоді величина сили FB.0 знизиться до значення 5. Крейсерська швидкість, км/год 180 FВ.1, натомість згідно (2), її вертикальна складова 6. Потужність двигунів, кВт FB.У.0 зросте до значення: 2´11 = 22 7. Макс, віддалення в автоматичноFB.У.1 =FВ.1×tg jв.1. му режимі, км 500 Відновлювальний момент МВ, що ініціюється 8. Макс. висота польоту, м 3000 силою FВ.У.1 буде дорівнювати: 10. Макс. тривалість польоту, год 6 МВ = F B.У.1×lр.в. (8) Комп’ютерна верстка А. Крижанівський Підписне Тираж 28 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюTwin-engine pilotless vehicle
Автори англійськоюKulyk Mykola Serhiiovych, Kharchenko Volodymyr Petrovych, Matiichyk Mykhailo Petrovych
Назва патенту російськоюДвухмоторный беспилотный летательный аппарат
Автори російськоюКулик Николай Сергеевич, Харченко Владимир Петрович, Матийчик Михаил Петрович
МПК / Мітки
МПК: B64C 39/02
Мітки: безпілотний, двомоторний, літальний, апарат
Код посилання
<a href="https://ua.patents.su/3-40288-dvomotornijj-bezpilotnijj-litalnijj-aparat.html" target="_blank" rel="follow" title="База патентів України">Двомоторний безпілотний літальний апарат</a>
Двомоторний безпілотний літальний апарат спеціального призначення
Номер патенту: 33977
Опубліковано: 25.07.2008
Автори: Харченко Володимир Петрович, Матвійчик Михайло Петрович
МПК: B64C 39/02
Мітки: двомоторний, безпілотний, призначення, спеціального, апарат, літальний
Формула / Реферат:
Двомоторний безпілотний літальний апарат спеціального призначення, що містить гондолу, хвостові балки, трапецієподібне крило, двокілеве хвостове оперення, шасі, тягнучу та штовхаючу силові установки, розміщені попереду та позаду гондоли, який відрізняється тим, що крило виконано прямокутним у плані і підняте над гондолою на двох пілонах, тягнуча силова установка перенесена на лінію половини розмаху крила впритул до його передньої кромки,...
Одномоторний безпілотний літальний апарат для захисту рослин
Номер патенту: 34952
Опубліковано: 26.08.2008
Автори: Рибальченко Олександр Сергійович, Матійчик Михайло Петрович
МПК: B64C 39/02
Мітки: одномоторний, захисту, рослин, апарат, літальний, безпілотний
Формула / Реферат:
Одномоторний безпілотний літальний апарат для захисту рослин, що складається з носової гондоли, хвостової балки, трапецієподібного крила без стрілоподібності, хрестоподібного хвостового оперення, шасі, силової установки на пілоні та начіпних робочих органів, який відрізняється тим, що крило виконане стрілоподібним та прямокутним у плані, носова гондола та хвостова балка виконані у вигляді єдиного фюзеляжу, силова установка встановлена...
Безпілотний літальний апарат “моноліт”

Номер патенту: 17324
Опубліковано: 15.09.2006
Автори: Лещенко Юрій Терентійович, Кудрін Анатолій Павлович
МПК: B64C 29/00
Мітки: безпілотний, моноліт, літальний, апарат
Формула / Реферат:
1. Безпілотний літальний апарат, що містить корпус круглої замкнутої форми, вмонтований у корпус привід з горизонтальним пропелером, з нижнім повітровипускним і верхнім повітрозабірним отворами, який відрізняється тим, що корпус виконаний порожнистим у формі кільцевого крила і у перерізі має профіль крила, а усередині корпусу встановлені щонайменше дві спрямовуючі площини, біля кожної з яких встановлений дефлектор з можливістю повороту...
Ударний дистанційно керований безпілотний літальний апарат
Номер патенту: 31234
Опубліковано: 25.03.2008
Автори: Растригін Олександр Олексійович, Василенко Олександр Васильович, Загороднюк Юрій Григорович, Лапицький Сергій Володимирович, Чіпіжко Юрій Анатолійович, Асланян Альберт Едуардович, Сила Ігор Михайлович, Лук'янов Павло Олександрович, Борохвостов Ігор Валерійович, Мельник Олександр Дмитрович, Тішков Сергій Юрійович, Чучмій Андрій Володимирович, Комаров Володимир Олександрович, Машталір Вадим Віталійович, Гордієвський Олексій Тихонович
МПК: H04B 7/185, B64C 30/00
Мітки: літальний, керований, безпілотний, ударний, дистанційно, апарат
Формула / Реферат:
1. Ударний дистанційно керований безпілотний літальний апарат, який містить фюзеляж, крило та хвостове оперення з органами керування, розміщені на фюзеляжі, один, два чи більше двигунів, пристрій для зльоту/посадки, вузли кріплення засобів ураження, закріплені на крилі і/чи на фюзеляжі, системи забезпечення та функціонування літального апарата, систему керування та наведення літального апарата на ціль, засоби ураження, розміщені на зазначених...
Багатоцільовий безпілотний літальний апарат “літаюче крило”

Номер патенту: 13409
Опубліковано: 15.03.2006
Автори: Комаров Володимир Олексадрович, Іщенко Сергій Олександрович, Лемко Олег Львович
МПК: B64C 39/10
Мітки: літальний, безпілотний, багатоцільовий, апарат, літаюче, крило
Формула / Реферат:
1. Багатоцільовий безпілотний літальний апарат «літаюче крило», який містить корпус, що утворений з центроплана, кореневої частини крила і консолей крила, силову установку, розміщену усередині центроплана, повітрозабірник, виконаний в центроплані по поздовжній осі зазначеного центроплана і, відповідно, літака, канал для підведення повітря до силової установки, канал для відведення повітря напірного потоку від зазначеної силової установки,...
Попередній патент: Легкий протипиловий респіратор
Наступний патент: Спосіб нанесення несуцільних зносостійких покриттів
Випадковий патент: Будівля арочного типу