Спосіб вимірювання натягу
Номер патенту: 40922
Опубліковано: 15.08.2001
Автори: Раздобаров Віктор Георгійович, Єрмоленко Анатолій Олександрович, Сацюк Валерій Іванович, Чаков Олександр Миколайович, Сімененко Олег Володимирович
Формула / Реферат
Спосіб вимірювання натягу, що включає вимірювання зусилля, яке передає смуга на вимірювальний ролик з датчиками сили, визначення кута обхвату смугою вимірювального ролика і коефіцієнта корекції зусилля, що сприймають датчики сили, який відрізняється тим, що кут обхвату і коефіцієнт корекції визначають безперервно в залежності від змінного радіуса рулону на моталці та розмірів конструкції:
φ = f(li,R),
К=F(Іі,R), де
R - радіус рулону,
Ii - розміри конструкції, що впливають на кут обхвату та, відповідно, на коефіцієнт корекції;
при цьому радіус рулону визначають у відповідності з формулою:
R= r · n / Ν , де
r - радіус вимірювального ролика - постійна величина,
n - кутова швидкість вимірювального ролика,
Ν - кутова швидкість моталки.
Текст
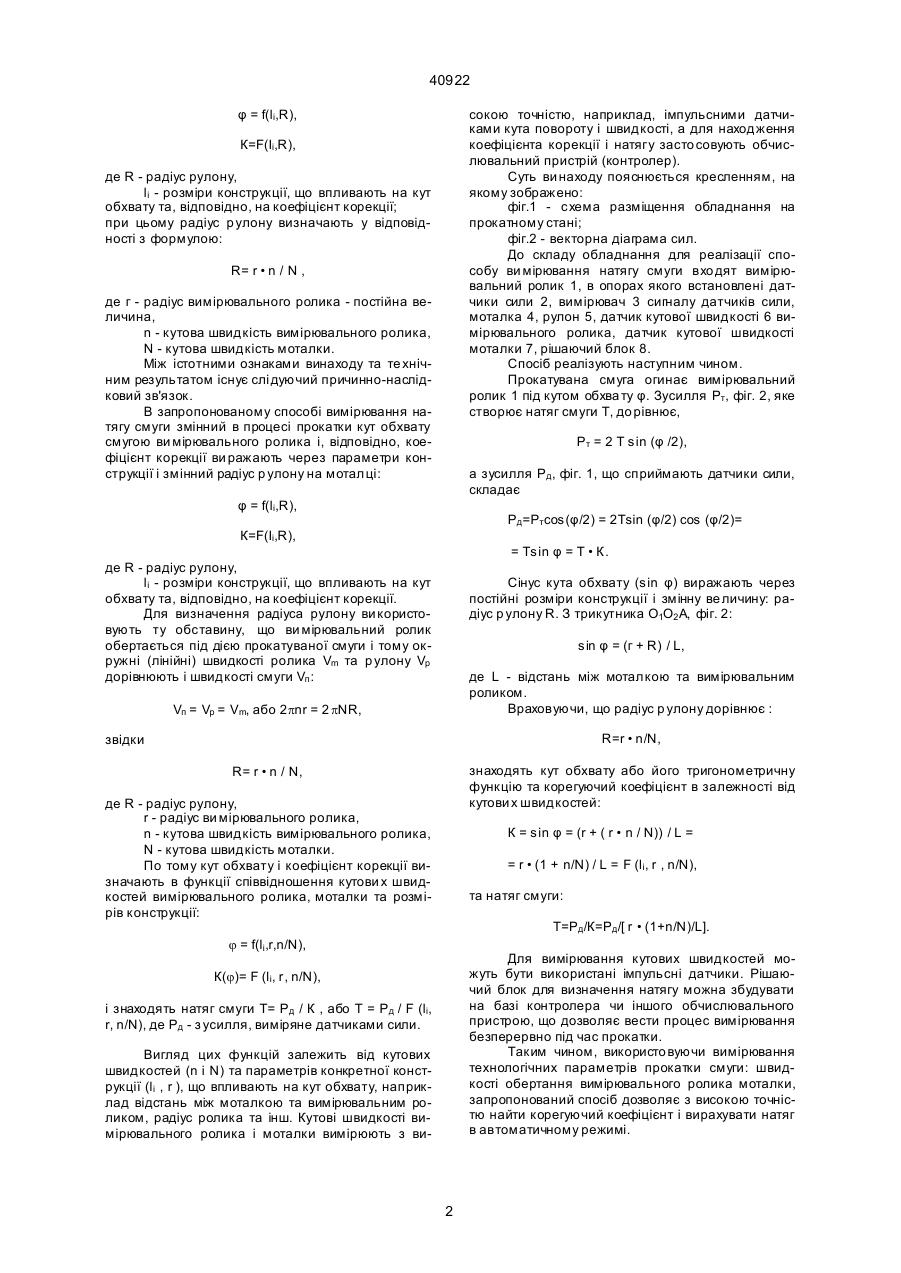
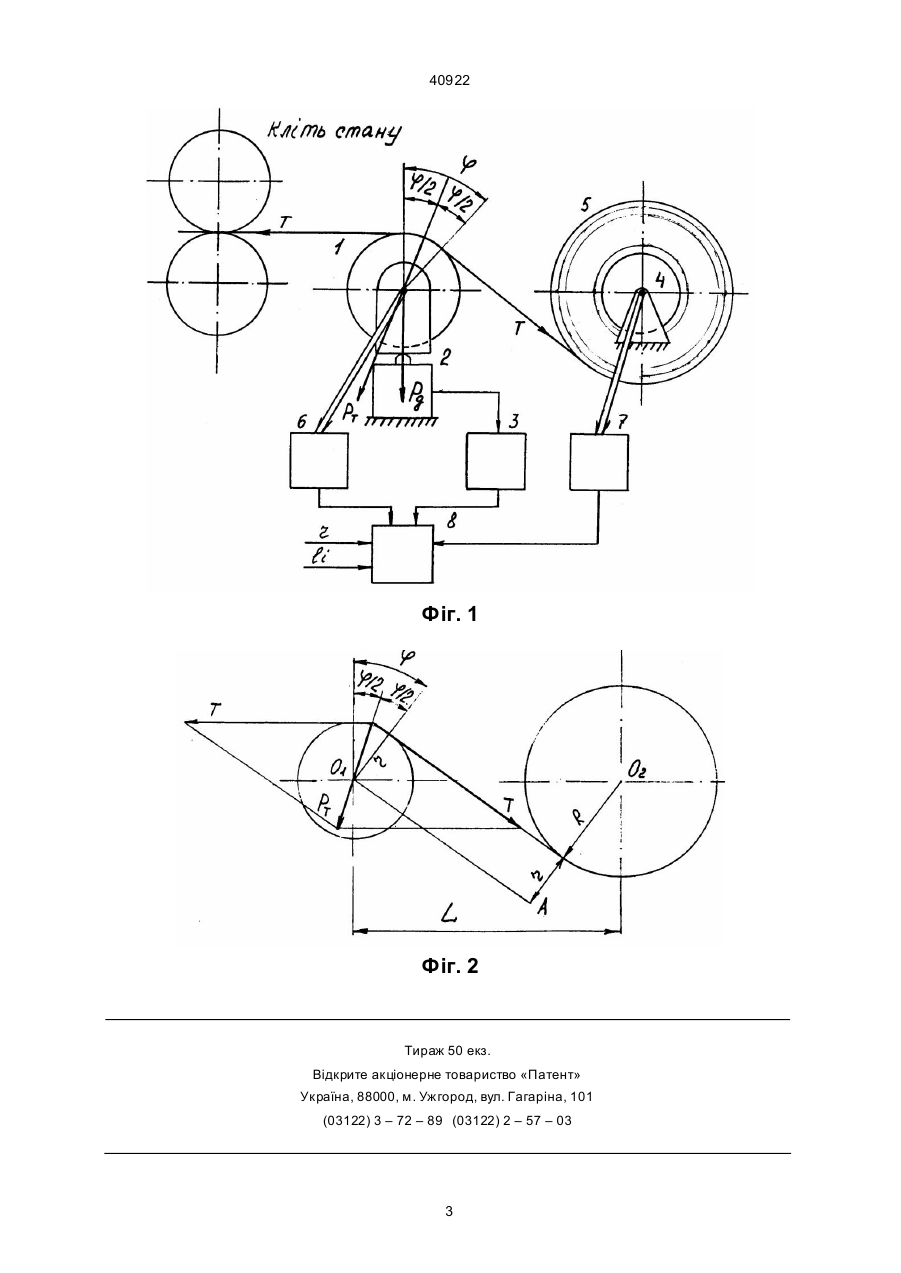
Спосіб вимірювання натягу, що включає вимірювання зусилля, яке передає смуга на вимірювальний ролик з датчиками сили, визначення кута обхвату смугою вимірювального ролика і коефіцієнта корекції зусилля, що сприймають датчики сили, який відрізняється тим, що кут обхва ту і коефіцієнт корекції визначають безперервно в залежності від змінного радіуса рулону на моталці та розмірів конструкції: φ = f(l i,R), К=F(Іі,R), де R - радіус рулон у, Ii - розміри конструкції, що впливають на кут обхва ту та, відповідно, на коефіцієнт корекції; при цьому радіус рулону визначають у відповідності з формулою: R= r · n / Ν , де r - радіус вимірювального ролика - постійна величина, n - кутова швидкість вимірювального ролика, Ν - кутова швидкість моталки. В.Ш. (13) 40922 (11) UA ного вве дення в вимірювальні ланцюги датчиків сили попередньо вирахуваних фа зових зсувів напруг їх живлення на кути, під якими розміщені упори з датчиками сили і обчислення фази сумарної вихідної напруги датчиків. При цьому не враховуються фазові зсуви вихідних напруг датчиків сили по відношенні до фаз напруги їх живлення, які залежать від індивідуальних властивостей датчиків та параметрів (R,L,C) ліній зв'язку з джерелами живлення. В основу ви находу поставлена задача вдосконалення способу вимірювання натягу см уги шляхом використання технологічних параметрів процесу прокатки, що дозволяє безперервно визначати змінний кут обхвату вимірювального ролика смугою і коефіцієнт корекції зусилля, вимірюваного датчиками сили, а отже підвищити точність і надійність вимірювання натягу см уги. Поставлена задача вирішується наступ ним чином. В відомому способі вимірювання натягу смуги, що вк лючає вимірювання зусилля, що передає смуга на вимірювальний ролик з датчиками сили, визначення кута обхвату смугою ви мірювального ролика і коефіцієнта корекції зусилля, що сприймають датчики сили, передбачені наступні відмінності: кут обхвату і коефіцієнт корекції визначають в залежності від змінного радіуса рулону на моталці та розмірів конструкції: (19) Спосіб стосується техніки вимірювання натягу прокатуваної смуги, каната і інши х гнучких елементів і може бути використа ний в прокатному виробництві, вантажопідйомних механізмах і інших областях те хніки. Відомий пристрій для вимірювання натягу в тросі по авт. св. СРСР № 1714393, MKI G01L 5/04, 23.02.92, бюл. № 7, в якому вимірюють зусилля з допомогою датчика сили в опорі підвісного блоку, визначають кут ви гину тро са і коефіцієнт корекції та ви конують обчислювання натягу, корегуючи виміряне зусилля. Пристрій має невисоку точність, через те, що вимірювання кута вигину тро са виконується візуально з допомогою кутоміра під час зупинки троса, і тим, що визначення коефіцієнта корекції та обчислення натягу ви конується вручну. Найбільш близьким по технічній суті є пристрій для вимірювання натягу по авт. св. СРСР № 368505, МКІ G01L 5/10, 26.01.73, бюл. № 9, в якому вимірюють зусилля, що створює смуга на вимірювальний ролик з датчиками сили, визначають кут обхвату см угою вимірювального ролика і коефіцієнт корекції зусилля, що сприймається датчиками сили. Недоліком пристрою є низька точність, зумовлена тим, що виз начення кута обхвату і коефіцієнта корекції зусилля, виміряного датчиками сили, не пов'язане з технологічними характеристиками процесу прокатки, а ви конується шляхом руч А ____________________ 40922 φ = f(l i,R), сокою точністю, наприклад, імпульсними датчиками кута повороту і швидкості, а для находження коефіцієнта корекції і натягу засто совують обчислювальний пристрій (контролер). Суть ви находу пояснюється кресленням, на якому зображено: фіг.1 - схема разміщення обладнання на прокатному стані; фіг.2 - векторна діаграма сил. До складу обладнання для реалізації способу ви мірювання натягу смуги вхо дят вимірювальний ролик 1, в опорах якого встановлені датчики сили 2, вимірювач 3 сигналу датчиків сили, моталка 4, рулон 5, датчик кутової швидкості 6 вимірювального ролика, датчик кутової швидкості моталки 7, рішаючий блок 8. Спосіб реалізують наступним чином. Прокатувана смуга огинає вимірювальний ролик 1 під кутом обхва ту φ. Зусилля Рт, фіг. 2, яке створює натяг смуги Т, до рівнює, К=F(Іі,R), дe R - радіус рулону, li - розміри конструкції, що впливають на кут обхвату та, відповідно, на коефіцієнт корекції; при цьому радіус р улону визначають у відповідності з формулою: R= r • n / N , де г - радіус вимірювального ролика - постійна величина, n - кутова швидкість вимірювального ролика, N - кутова швидкість моталки. Між істотними ознаками винаходу та те хнічним результатом існує слі дуючий причинно-наслідковий зв'язок. В запропонованому способі вимірювання натягу смуги змінний в процесі прокатки кут обхвату смугою ви мірювального ролика і, відповідно, коефіцієнт корекції ви ражають через параметри конструкції і змінний радіус р улону на моталці: Рт = 2 Т sin (φ /2), а зусилля Рд, фіг. 1, що сприймають датчики сили, складає φ = f(l i,R), Рд=Ртcos(φ/2) = 2Tsin (φ/2) cos (φ/2)= К=F(Іі,R), = Tsin φ = Т • К. де R - радіус рулону, li - розміри конструкції, що впливають на кут обхвату та, відповідно, на коефіцієнт корекції. Для визначення радіуса рулону ви користовують ту обставину, що ви мірювальний ролик обертається під дією прокатуваної смуги і тому окружні (лінійні) швидкості ролика Vm та р улону Vp дорівнюють і швидкості смуги Vп : Сінус кута обхвату (sin φ) виражають через постійні розміри конструкції і змінну ве личину: радіус р улону R. З трикутника О1О2 А, фіг. 2: sin φ = (г + R) / L, де L - відстань між моталкою та вимірювальним роликом. Враховуючи, що радіус р улону дорівнює : Vп = Vp = Vm, або 2pnr = 2 pNR, R=r • n/N, звідки знаходять кут обхвату або його тригонометричну функцію та корегуючий коефіцієнт в залежності від кутови х швидкостей: R= r • n / N, де R - радіус рулону, r - радіус ви мірювального ролика, n - кутова швидкість вимірювального ролика, N - кутова швидкість моталки. По тому кут обхвату і коефіцієнт корекції визначають в функції співвідношення кутови х швидкостей вимірювального ролика, моталки та розмірів конструкції: К = sin φ = (r + ( r • n / N)) / L = = r • (1 + n/N) / L = F (l i, r , n/N), та натяг смуги: Т=Рд/К=Рд/[ r • (1+n/N)/L]. j = f(l i,r,n/N), Для вимірювання кутових швидкостей можуть бути використані імпульсні датчики. Рішаючий блок для визначення натягу можна збудувати на базі контролера чи іншого обчислювального пристрою, що дозволяє вести процес вимірювання безперервно під час прокатки. Таким чином, використо вуючи вимірювання технологічних параметрів прокатки смуги: швидкості обертання вимірювального ролика моталки, запропонований спосіб дозволяє з високою точністю найти корегуючий коефіцієнт і вирахувати натяг в автоматичному режимі. К(j)= F (li, r, n/N), і знаходять натяг смуги Т= Рд / К , або Т = Рд / F (li, r, n/N), де Рд - з усилля, виміряне датчиками сили. Вигляд цих функцій залежить від кутових швидкостей (n і N) та параметрів конкретної конструкції (li , r ), що впливають на кут обхвату, наприклад відстань між моталкою та вимірювальним роликом, радіус ролика та інш. Кутові швидкості вимірювального ролика і моталки вимірюють з ви 2 40922 Фіг. 1 Фіг. 2 Тираж 50 екз. Відкрите акціонерне товариство «Патент» Україна, 88000, м. Ужгород, вул. Гагаріна, 101 (03122) 3 – 72 – 89 (03122) 2 – 57 – 03 3
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod of tension measurement
Автори англійськоюSimenenko Oleh Volodymyrovych, Yermolenko Anatoliy Oleksandrovych, Razdobarov Viktor Heorhiyovych, Satsiuk Valeriy Ivanovych, Chakov Oleksandr Mykolayovych
Назва патенту російськоюСпособ измерения натяжения
Автори російськоюСимененко Олег Владимирович, Ермоленко Анатолий Александрович, Раздобаров Виктор Георгиевич, Сацюк Валерий Иванович, Чаков Александр Николаевич
МПК / Мітки
МПК: G01L 5/04
Мітки: вимірювання, натягу, спосіб
Код посилання
<a href="https://ua.patents.su/3-40922-sposib-vimiryuvannya-natyagu.html" target="_blank" rel="follow" title="База патентів України">Спосіб вимірювання натягу</a>
Спосіб установлення пристрою для вимірювання сили у системі контролю натягу армоканатів захисних оболонок енергоблоків атомних електростанцій
Номер патенту: 31322
Опубліковано: 15.12.2000
Автори: Орлов Валерій Олександрович, Абарбарчук Ігор Азарович, Нікітінський Михайло Павлович, Браз Вадим Давидович
Мітки: натягу, контролю, спосіб, атомних, пристрою, енергоблоків, оболонок, захисних, сили, електростанцій, армоканатів, вимірювання, системі, установлення
Текст:
..., які зв'язані з особливістю конструкції основи , силоутворюючого пристрою (домкратя) та вузла силовведення, які дозволяють здійснити вбудову пристрою у систему армоканатів у похилому положенні , а також в особливості його монтажу та демонтажу на гільзі армоканата,яка за безпечує надійність та необхідну точність вимірювання натягу кож ного армокаката. Порівняльний аналіз технічного рішення, що заявляється з Іншими, відомими Із...
Спосіб дистанційного контролю зусиль натягу армоканатів захисних оболонок енергоблоків атомних електростанцій
Номер патенту: 35844
Опубліковано: 16.04.2001
Автори: Нікітінський Михайло Павлович, Абарбарчук Ігор Азарович
МПК: G01L 1/22
Мітки: спосіб, натягу, атомних, електростанцій, зусиль, захисних, армоканатів, дистанційного, енергоблоків, оболонок, контролю
Формула / Реферат:
Спосіб дистанційного контролю зусиль натягу армоканатів захисних оболонок енергоблоків атомних електростанцій, при якому за допомогою механізму силовведення створюють необхідні зусилля для впливу на силовимірювальні датчики, які визначають зусилля натягу армоканатів, порівнюють їх показання з показаннями зразкових засобів вимірювань, який відрізняється тим, що механізмом силовведення (домкратом) створюють певний натяг окремого армоканата,...
Пристрій для вимірювання натягу спиць
Номер патенту: 19346
Опубліковано: 25.12.1997
Автор: Пасічник Віталій Анатолійович
МПК: G01B 5/30
Мітки: вимірювання, пристрій, спиць, натягу
Формула / Реферат:
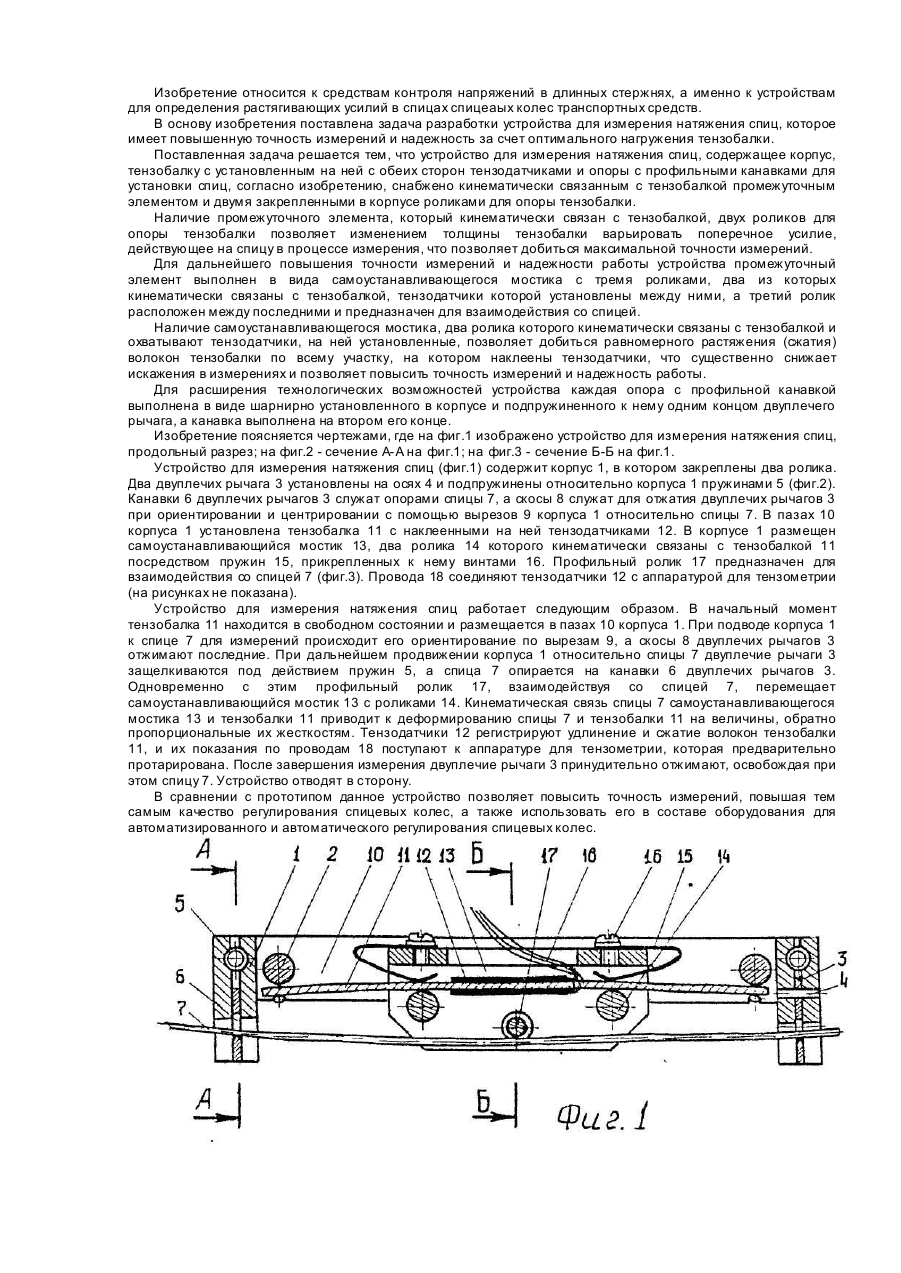
1. Устройство для измерения натяжения спиц, содержащее корпус, тензобалку с установленными на ней с обеих сторон тензодатчиками и опоры с профильными канавками для установки спиц, отличающееся тем, что оно снабжено кинематически связанным с тензобалкой промежуточным элементом и двумя закрепленными в корпусе роликами для опоры тензобалки.2. Устройство по п.1, отличающееся тем, что промежуточный элемент выполнен в виде...
Спосіб калібрування та повірки силовимірювальних датчиків у системі контролю натягу армоканатів
Номер патенту: 31547
Опубліковано: 15.12.2000
Автори: Браз Вадим Давидович, Орлов Валерій Олександрович, Абарбарчук Ігор Азарович, Нікітінський Михайло Павлович
МПК: G01L 1/22
Мітки: системі, армоканатів, натягу, повірки, контролю, датчиків, спосіб, силовимірювальних, калібрування
Текст:
...Індуктованих показань силовимірювального датчика , що ка лібрують та зразкових засобів вимірювань під час впливу на них з £ даних зусиль, провести точне масштабування апаратури Індикації СІ ловимірювальних датчиків, що калібрують, яке надає їм можливість з необхідною точністю постійно визначати натяг армоканату . Новина способу полягас у створенні таких вихідних умов для п чатку вимірювань, зв'язаних з особливостями вбудови...
Спосіб оптичного вимірювання величини прискорення сили тяжіння
Номер патенту: 33397
Опубліковано: 15.02.2001
Автори: Бурачек Всеволод Германович, Гніденко Микола Володимирович
МПК: G01N 13/00, G01N 13/10
Мітки: прискорення, тяжіння, спосіб, оптичного, величини, сили, вимірювання
Текст:
...ge = 1/12G * ке, звідки ке = & * і2е; (7) Де ge - прискорення сили тяжіння на пункті з відомим значенням величини прискорення сили тяжіння; і 1е - відстань між елементами смуги поглинання на пункті з відомим значенням величини прискорення сили тяжіння. На робочому пункті визначають величину прискорення сили тяжіння за формулою: gp=l/l P 2 * k c , Де gp - прискорення сили тяжіння на робочому пункті ; 1 Р - відстань між елементами...
Попередній патент: Пристрій для очищення повітря
Наступний патент: Спосіб оцінки ризику рецидиву виразкової дуоденальної кровотечі
Випадковий патент: Система адаптивного управління сушаркою солоду на основі нечіткого підходу