Система адаптивного управління сушаркою солоду на основі нечіткого підходу
Номер патенту: 89465
Опубліковано: 25.04.2014
Автори: Смітюх Ярослав Володимирович, Герасименко Тетяна Михайлівна, Ладанюк Анатолій Петрович
Формула / Реферат
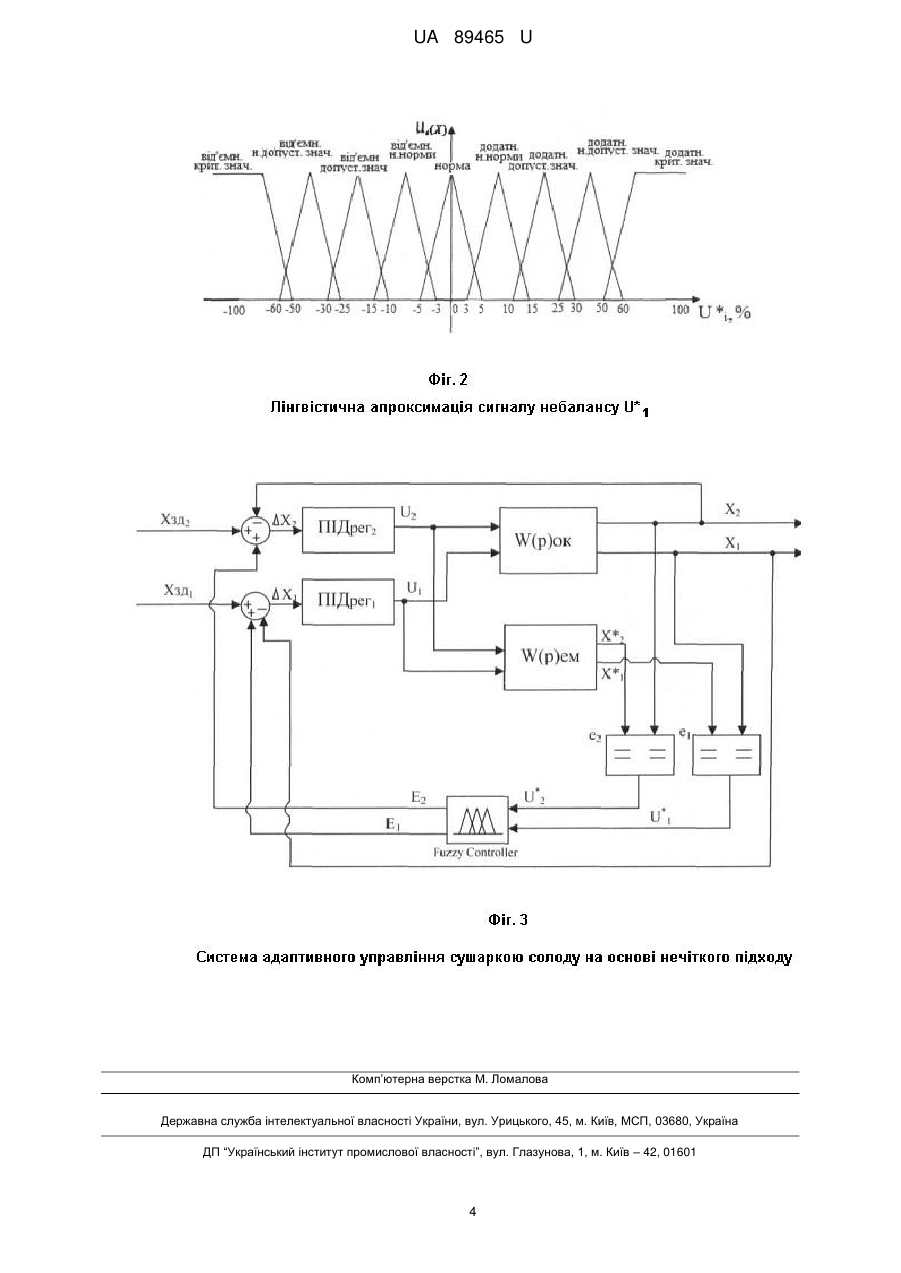
Система адаптивного управління сушаркою солоду на основі нечіткого підходу, що складається з об'єкта керування, датчиків, регулювальних органів, виконавчих механізмів, пропорційно-інтегрально-диференціального регулятора, яка відрізняється тим, що в систему додається блок нечіткої логіки, який в свою чергу формується з двох вхідних каналів небалансу U*1, U*2, відповідно до кожного регульованого параметра системи, та двох вихідних каналів, що подають сигнали корегувальних дій Е1, Е2 на входи пропорційно-інтегрально-диференціальних регуляторів, а основною частиною блока нечіткої логіки є база правил, яка реалізує гнучкі алгоритми формування Е1, Е2 та формується на основі процедури лінгвістичної апроксимації та формуванні причинно-наслідкових зв'язків між входами та виходами, типу "ЯКЩО… ТО…», на основі експертної та експериментальної інформації.
Текст
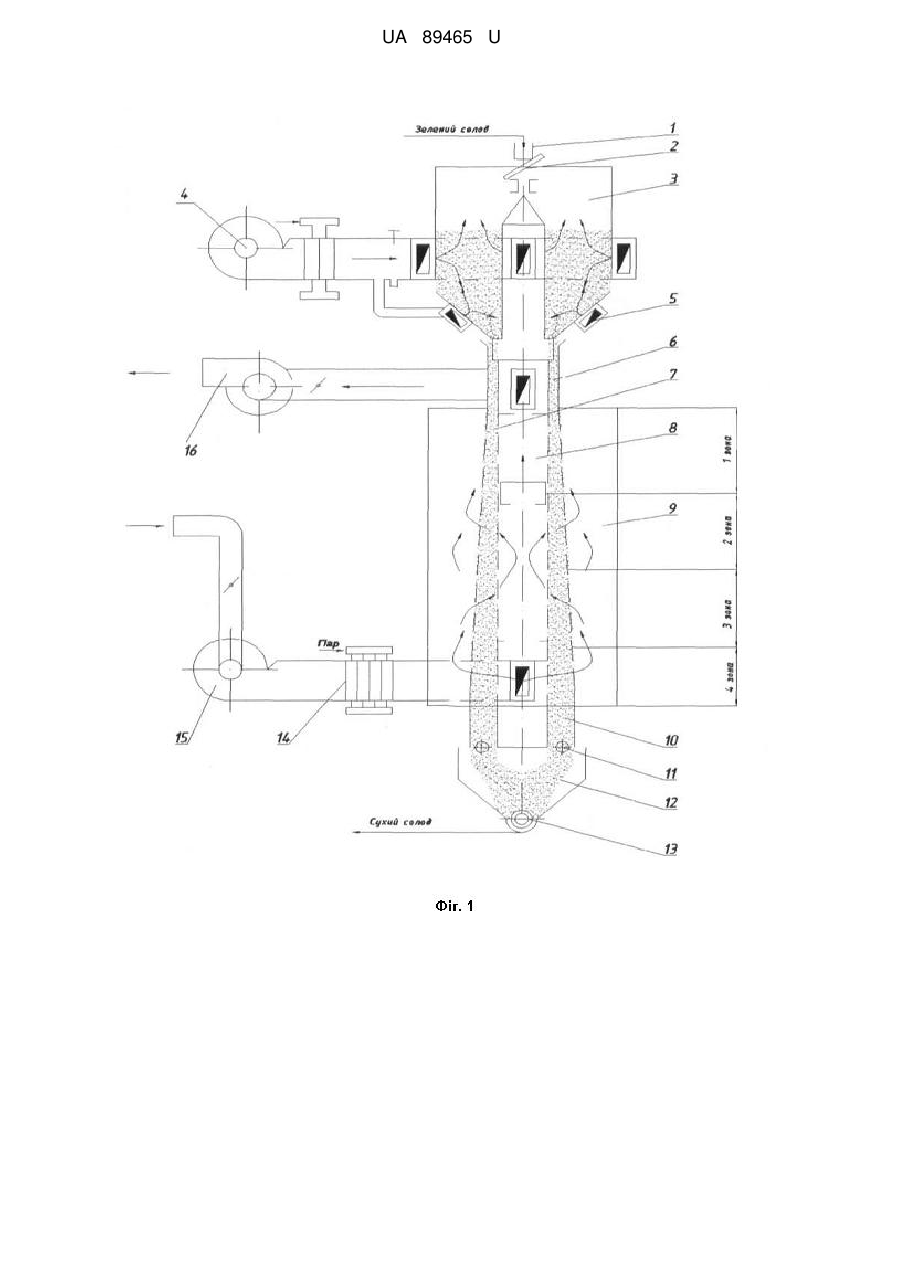
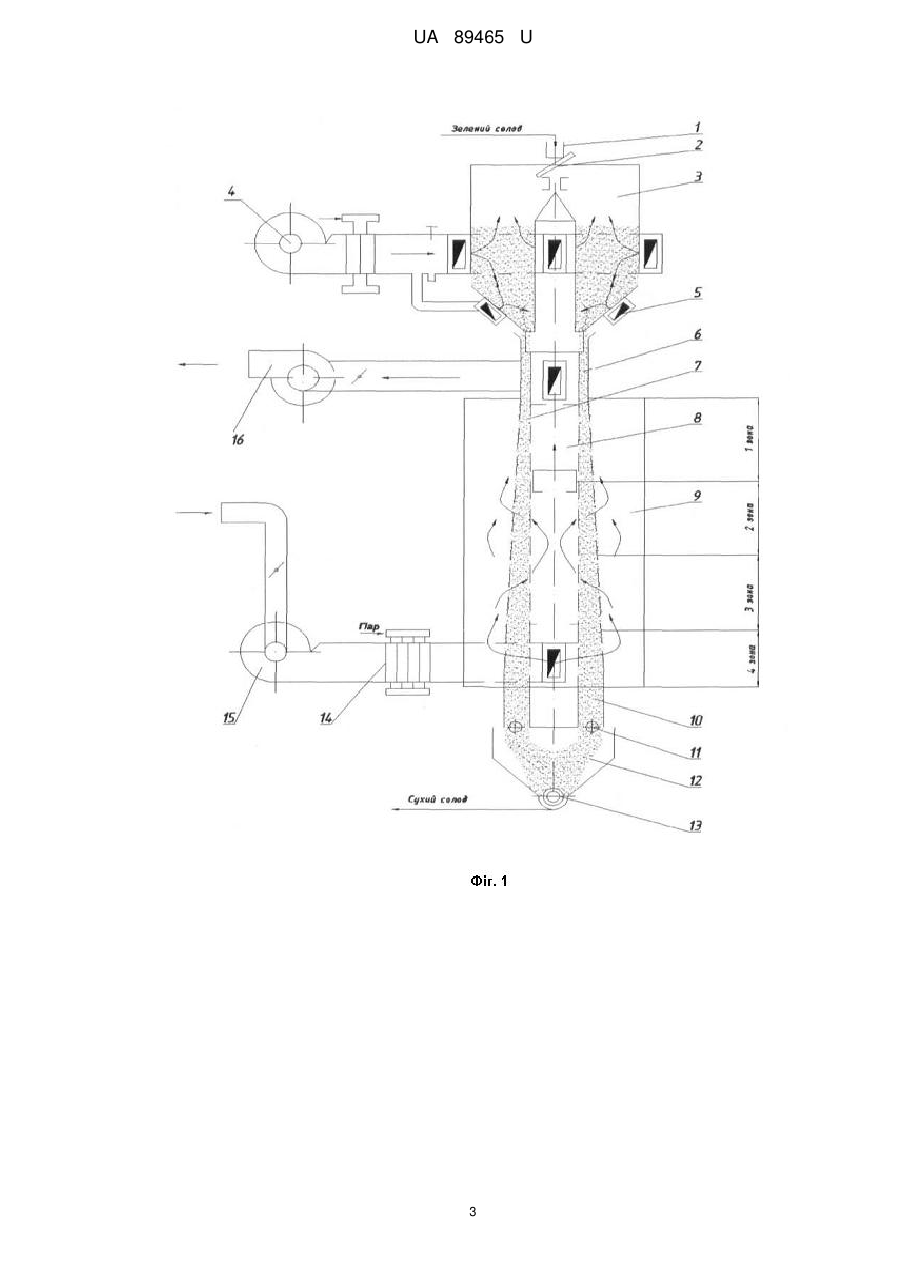
Реферат: Система адаптивного управління сушаркою солоду на основі нечіткого підходу містить об'єкт керування, датчики, регулювальні органи, виконавчі механізми, пропорційно-інтегральнодиференціальний регулятор. В систему додано блок нечіткої логіки, який в свою чергу формується з двох вхідних каналів небалансу U*1, U*2, відповідно до кожного регульованого параметра системи, та двох вихідних каналів, що подають сигнали корегувальних дій Е 1, Е2 на входи пропорційно-інтегрально-диференціальних регуляторів, а основною частиною блока нечіткої логіки є база правил, яка реалізує гнучкі алгоритми формування Е 1, Е2 та формується на основі процедури лінгвістичної апроксимації та формуванні причинно-наслідкових зв'язків між входами та виходами, типу "ЯКЩО… ТО…", на основі експертної та експериментальної інформації. UA 89465 U (54) СИСТЕМА АДАПТИВНОГО УПРАВЛІННЯ СУШАРКОЮ СОЛОДУ НА ОСНОВІ НЕЧІТКОГО ПІДХОДУ UA 89465 U UA 89465 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до автоматичного управління процесом сушіння солоду на солодосушарці при виготовленні пива і може бути застосована в харчовій промисловості, а також в інших галузях, де може бути використане адаптивне управління на основі нечіткого підходу для складних технологічних об'єктів. На (фіг. 1) зображена структурна схема шахтної солодосушарки неперервної дії типу ЛСХА. Відомі способи автоматичного управління процесу сушіння солоду на солодосушарці при виготовленні пива з використанням адаптивних систем управління на основі пропорційноінтегрального регулятора. Недоліком є те, що всі відомі методи синтезу алгоритмів адаптації параметрів регулятора системи управління складними об'єктами потребують виконання гіпотези про квазістаціонарність параметрів об'єкта управління при налаштуванні регулятора, що в свою чергу є причиною зниження якості управління в змінюваних умовах роботи, в окремих випадках можлива втрата стійкості. Найближчим аналогом вибрано систему автоматичного регулювання шахтною вертикальною солодосушаркою з використанням адаптивної системи управління (Ладанюк А.П. Система автоматического регулирования шахтной вертикальной солодосушилки /А.П. Ладанюк, Н.С. Герман // Авторское свидетельство СССР № 937934. - 1980. - С. 3), яка включає об'єкт керування, датчики температури, розміщені в III і IV зонах, блок еталонної моделі, регулятор температури, регулюючий орган та виконавчий механізм. Крім того, система включає датчик вологості, регулятор швидкості розвантаження, виконавчий механізм розвантаження та компенсуючий пристрій. До недоліків цієї системи можна віднести низький рівень перешкодостійкості та відносно невисоку швидкість адаптації. В основу корисної моделі поставлено задачу створення системи управління складним об'єктом з використанням адаптивного управління на основі нечіткого підходу для забезпечення кращих якісних характеристик системи і економії ресурсів. Поставлена задача вирішується тим, що система адаптивного управління сушаркою солоду на основі нечіткого підходу, що складається з об'єкта керування, датчиків, регулювальних органів, виконавчих механізмів, пропорційно-інтегрально-диференціального регулятора, згідно з корисною моделлю, створюється додаванням в систему блока нечіткого логічного висновку, який в свою чергу складається з двох вхідних каналів, на які надходять сигнали небалансу U* 1, U*2 та двох вихідних каналів, що подають сигнали корегувальних дій Е 1, Е2 на входи пропорційно-інтегрально-диференціальних регуляторів, а основною частиною блока нечіткої логіки є база правил, яка реалізує гнучкі алгоритми формування Е 1, Е2 та формується на основі процедури лінгвістичної апроксимації та формуванні причинно-наслідкових зв'язків між входами та виходами, типу "ЯКЩО… ТО…", на основі експертної та експериментальної інформації. Як приклад показана лінгвістична апроксимація сигналу небалансу U* 1 (Фіг. 2). Причинно-наслідковий зв'язок між запропонованими ознаками та очікуваним технічним результатом полягає в наступному. Технологічний об'єкт має регламентовану технологічним процесом дію. Зелений солод з вологістю 41…43 % через трубу 1 надходить на розподільник 2, який рівномірно розподіляє його за каналами камери підв'ялювання 3. У ній зелений солод підсушується підігрітим калорифером зовнішнім повітрям через повітроводи 5, що нагнітається вентилятором 4, на виході калорифера встановлено датчик контролю температури, а його тиск регулюється регулятором Овен ТРМ 10. Під час роботи апарата з камери підв'ялювання, на виході якої встановлено датчик температури, вальцями солод подається в завантажувальні шахти 6, з них сходить в сушильні шахти 7, до яких знизу примикають розвантажувальні шахти 10. Солод переміщується вниз під дією сили тяжіння. На виході кожної із чотирьох зон сушарки встановлені датчики контролю температури. Повітря, нагріте паровим калорифером 14 до 75-85 °C, подається в нижню частину середнього повітряного каналу 8 нижнім нагнітаючим відцентровим вентилятором 15, на виході з калорифера встановлено датчик температури, значення якої регулюється регулятором Овен ТРМ-12, який також регулює температуру в зонах. Проходячи зигзагоподібно через шари солоду, нагріте повітря потрапляє в бічні канали 9, повертається в канал 8 і вентилятором 16 висушеним викидається назовні, де встановлено датчик контролю температури. Солод вивантажується валками 11 з розвантажувальних шахт 10 в приймальний бункер 12, звідки шнеком 13 транспортується для подальшої переробки, яким регулюється швидкість розвантажування. Високий шар солоду в завантажувальних шахтах створює затвор, що перешкоджає проходу зверху холодного повітря в сушарку. Знизу до корпусу сушарки примикають розвантажувальні шахти 12, які також служать затвором, що перешкоджає витоку теплого повітря з нижньої зони сушарки. Чітке дотримання даного процесу дає змогу досягти 1 UA 89465 U 5 10 15 20 максимальної якості вихідного продукту. За рахунок введення в систему даного алгоритму можна зменшити амплітуду коливань температури, суттєво підвищити швидкість адаптації системи до невідомих та змінюваних параметрів, тим самим підвищити якість керування. На фіг. 3 представлена структурна схема системи адаптивного управління сушаркою солоду на основі нечіткої логіки: де Хзд - вектор заданих значень регульованої величини; ΔХ1, АХ2 - вектор розузгодження; W ОК - передаточна функція сушарки; W ЕМ - передаточна функція еталонної моделі сушарки; U1, U2 - вектор керуючих дій; U*1, U*2 - небаланс; Х1, Х2 - вектор дійсного значення регульованих величин; Х*1, Х*2 - вектор еталонного значення регульованих величин; е1, е2 - блок порівняння; Е1, Е2 - величини корегуючих дій. Система працює наступним чином. Якщо сигнал небалансу (U*1, U*2) між дійсним значенням об'єкта (Х1, Х2) та еталонним (Х*1, Х*2) відмінний від нуля, спрацьовує логічне правило закладене в базі нечітких правил. При цьому результат логічного висновку буде додатнім або від'ємним і впливатиме як корегувальна дія (Е1, Е2) на кожен із входів пропорційно-інтегральнодиференціальних регуляторів основних контурів регулювання сушарки. Технічний результат корисної моделі полягає в тому, що система адаптивного управління сушаркою солоду на основі нечіткого підходу забезпечує більшу швидкодію системи, підвищує якість керування, збільшує точність підтримання технологічних параметрів функціонування технологічного об'єкта, а також зменшує витрати ресурсів. 25 ФОРМУЛА КОРИСНОЇ МОДЕЛІ 30 35 Система адаптивного управління сушаркою солоду на основі нечіткого підходу, що складається з об'єкта керування, датчиків, регулювальних органів, виконавчих механізмів, пропорційноінтегрально-диференціального регулятора, яка відрізняється тим, що в систему додається блок нечіткої логіки, який в свою чергу формується з двох вхідних каналів небалансу U* 1, U*2, відповідно до кожного регульованого параметра системи, та двох вихідних каналів, що подають сигнали корегувальних дій Е1, Е2 на входи пропорційно-інтегрально-диференціальних регуляторів, а основною частиною блока нечіткої логіки є база правил, яка реалізує гнучкі алгоритми формування Е1, Е2 та формується на основі процедури лінгвістичної апроксимації та формуванні причинно-наслідкових зв'язків між входами та виходами, типу "ЯКЩО… ТО…", на основі експертної та експериментальної інформації. 2 UA 89465 U 3 UA 89465 U Комп’ютерна верстка М. Ломалова Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 4
ДивитисяДодаткова інформація
Автори англійськоюLadaniuk Anatolii Petrovych
Автори російськоюЛаданюк Анатолий Петрович
МПК / Мітки
Мітки: система, основі, адаптивного, нечіткого, підходу, солоду, управління, сушаркою
Код посилання
<a href="https://ua.patents.su/6-89465-sistema-adaptivnogo-upravlinnya-susharkoyu-solodu-na-osnovi-nechitkogo-pidkhodu.html" target="_blank" rel="follow" title="База патентів України">Система адаптивного управління сушаркою солоду на основі нечіткого підходу</a>
Спосіб нейро-нечіткого управління інтенсивністю відправлення даних вузлами-джерелами в телекомунікаційній мережі
Номер патенту: 78147
Опубліковано: 11.03.2013
Автори: Рвачова Наталія Володимирівна, Польщиков Костянтин Олександрович
МПК: G05F 1/00
Мітки: інтенсивністю, нейро-нечіткого, мережі, управління, вузлами-джерелами, відправлення, телекомунікаційній, даних, спосіб
Формула / Реферат:
Спосіб нейро-нечіткого управління інтенсивністю відправлення даних вузлами-джерелами в телекомунікаційній мережі, який полягає у тому, що у кожному такті на вузлі-джерелі здійснюється вимірювання значень часу очікування квитанцій, обчислюється значення ковзного середнього часу очікування квитанції, обчислені у попередньому та поточному тактах значення ковзного середнього часу очікування квитанції разом зі значенням затримки між відправленням...
Система керування технологічним об’єктом з використанням багатопараметричного регулятора на основі нечіткої логіки
Номер патенту: 58947
Опубліковано: 26.04.2011
Автори: Ладанюк Анатолій Петрович, Кроніковський Дмитро Олегович
МПК: G05B 13/02, G05B 11/01
Мітки: використанням, багатопараметричного, логіки, технологічним, регулятора, нечіткої, система, основі, об'єктом, керування
Формула / Реферат:
Система керування технологічним об'єктом з використанням багатопараметричного регулятора на основі нечіткої логіки, що містить об'єкт керування, датчики, регулюючі органи, виконавчі механізми, пропорційно-інтегрально-диференційний регулятор, яка відрізняється тим, що пропорційно-інтегрально-диференційний регулятор додатково містить похідні другого та третього порядку, а система додатково містить блок нечіткої логіки, який в свою чергу...
Система рекуперації енергетичних потоків у виробництві солоду
Номер патенту: 15647
Опубліковано: 17.07.2006
Автори: Шевченко Олександр Юхимович, Рєзнік Вячеслав Григорович, Бут Сергій Анатолійович, Піддубний Володимир Антонович, Соколенко Анатолій Іванович
Мітки: енергетичних, потоків, солоду, рекуперації, система, виробництві
Формула / Реферат:
Система рекуперації енергетичних потоків у виробництві солоду, що складається із тракту підготовки і подавання повітря для сушарки солоду та тракту підготовки та подавання повітря в ящики для пророщування солоду, яка відрізняється тим, що тракт підготовки і подавання повітря для сушарки солоду виконаний у вигляді теплообмінника з вентилятором, конденсатора холодильної установки та теплогенератора, а в тракт підготовки та подавання повітря в...
Спосіб нейро-нечіткого управління пакетною чергою вихідного порту маршрутизатора телекомунікаційної мережі
Номер патенту: 72989
Опубліковано: 10.09.2012
Автори: Польщиков Костянтин Олександрович, Стрюк Олексій Юрійович, Здоренко Юрій Миколайович, Шкіцькій Володимир Володимирович
МПК: H04Q 9/00
Мітки: телекомунікаційної, нейро-нечіткого, вихідного, порту, чергою, мережі, управління, маршрутизатора, спосіб, пакетною
Формула / Реферат:
Спосіб нейро-нечіткого управління пакетною чергою вихідного порту маршрутизатора телекомунікаційної мережі полягає у тому, що протягом кожної ділянки часу встановленої тривалості здійснюється підрахунок кількості пакетів, що надходять до вихідного порту маршрутизатора для подальшого передавання, підраховані значення кількості пакетів, що надійшли до вихідного порту маршрутизатора протягом чотирьох попередніх ділянок часу, як вхідні величини...
Спосіб адаптивного управління динамічним об’єктом в системах термінального управління
Номер патенту: 51941
Опубліковано: 10.08.2010
Автори: Мельник Олександр Дмитрович, Іванов Борис Павлович, Копилова Зінаїда Миколаївна, Кучеров Дмитро Павлович
МПК: G05B 11/00, G05B 13/00
Мітки: управління, динамічним, системах, адаптивного, об'єктом, спосіб, термінального
Формула / Реферат:
Спосіб адаптивного управління динамічним об'єктом в системах термінального управління, за яким в системі керування встановлюють вхідні дані, що включають бажану похибку відпрацювання завдання об'єктом керування, вхідні дані про кінцевий та початковий стан об'єкта керування, початкові значення вагових коефіцієнтів контролера, значення початкового керування в системі термінального управління, та в процесі руху вимірюють координати об'єкта...
Попередній патент: Каркасна будівля “монофант”
Наступний патент: Спосіб прогнозування індивідуального лікування хворих на рак молочної залози
Випадковий патент: Спосіб створення бурової свердловини у підземній формації