Спосіб дистанційного контролю зусиль натягу армоканатів захисних оболонок енергоблоків атомних електростанцій
Номер патенту: 35844
Опубліковано: 16.04.2001
Автори: Нікітінський Михайло Павлович, Абарбарчук Ігор Азарович
Формула / Реферат
Спосіб дистанційного контролю зусиль натягу армоканатів захисних оболонок енергоблоків атомних електростанцій, при якому за допомогою механізму силовведення створюють необхідні зусилля для впливу на силовимірювальні датчики, які визначають зусилля натягу армоканатів, порівнюють їх показання з показаннями зразкових засобів вимірювань, який відрізняється тим, що механізмом силовведення (домкратом) створюють певний натяг окремого армоканата, сигнали високоточних силовимірювальних датчиків зразкового засобу вимірювання (контрольної платформи), пропорційні прикладеному зусиллю, передають до аналого-цифрового перетворювача, перетворюють їх у цифрові коди, фіксують їх у показуючому приладі і вводять до оперативно-запам'ятовуючого пристрою комп'ютера, армоканати, з встановленими на них силовимірювальними датчиками, розподіляють на окремі групи, вихідні електричні сигнали кожної групи силовимірювальних датчиків передають до аналого-цифрового перетворювача, перетворюють їх у цифрові коди, передають їх до оперативно-запам'ятовуючого пристрою комп'ютера, проводять послідовне опитування кожного каналу аналого-цифрових перетворювачів у часі, запам'ятовують значення зусилля, яке сприймається силовимірювальними датчиками, встановленими на кожному армоканаті, індицирують їх, виводять на екран комп'ютера, проводять масштабування силовимірювальної системи, тобто адекватно порівнюють величину зусилля натягу армоканата, яке фіксують зразковим засобом вимірювання з величиною зусилля натягу армоканата, яке визначають встановленими на ньому силовимірювальними датчиками, проводять настроювання і калібрування встановлених на армоканатах силовимірювальних датчиків, які постійно визначають зусилля натягу армоканатів.
Текст
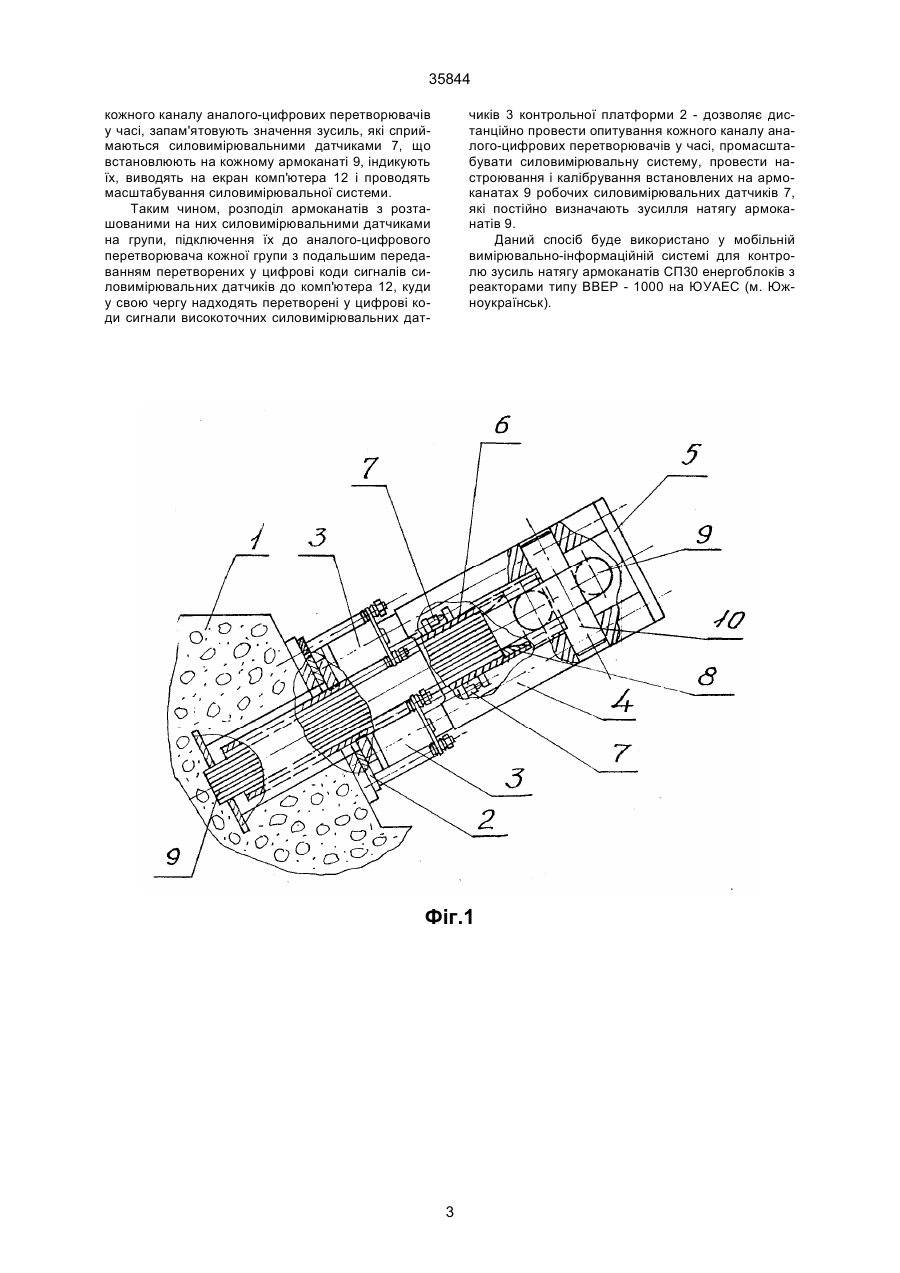
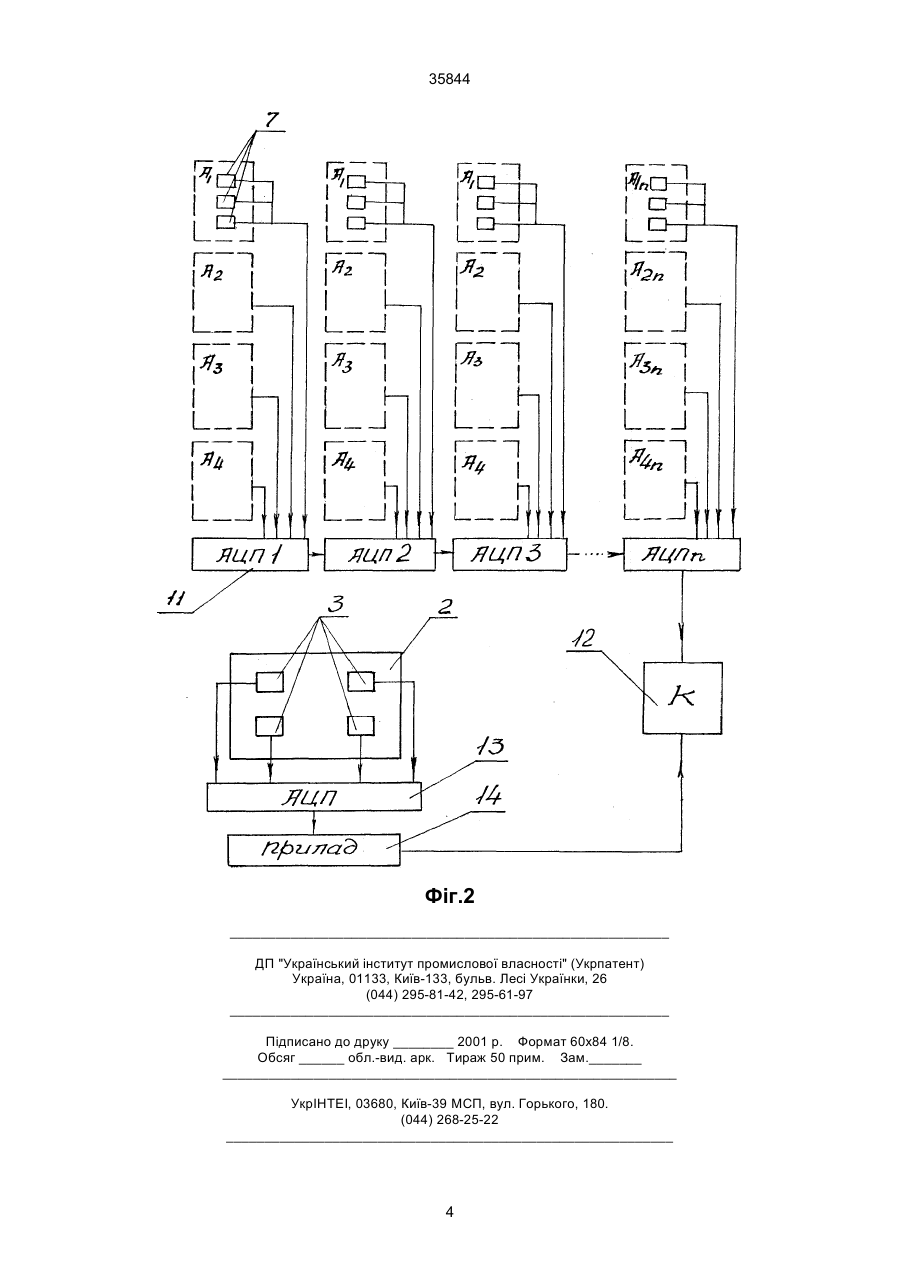
Спосіб дистанційного контролю зусиль натягу армоканатів захисних оболонок енергоблоків атомних електростанцій, при якому за допомогою механізму силовведення створюють необхідні зусилля для впливу на силовимірювальні датчики, які визначають зусилля натягу армоканатів, порівнюють їх показання з показаннями зразкових засобів вимірювань, який відрізняється тим, що механізмом силовведення (домкратом) створюють певний натяг окремого армоканата, сигнали високоточних силовимірювальних датчиків зразкового засобу вимірювання (контрольної платформи), пропорційні прикладеному зусиллю, передають до аналого-цифрового перетворювача, перетворюють їх у цифрові коди, фіксують їх у показуючому приладі і A (54) СПОСІБ ДИСТАНЦІЙНОГО КОНТРОЛЮ ЗУСИЛЬ НАТЯГУ АРМОКАНАТІВ ЗАХИСНИХ ОБОЛОНОК ЕНЕРГОБЛОКІВ АТОМНИХ ЕЛЕКТРОСТАНЦІЙ 35844 гу армоканатів захисних оболонок енергоблоків атомних електростанцій, повірки та калібрування силовимірювальних датчиків, які здійснюють контроль. До основи винаходу поставлене завдання створення способу дистанційного контролю зусиль натягу армоканатів захисних оболонок енергоблоків атомних електростанцій, повірки та калібрування датчиків сили, які здійснюють даний контроль, який дозволяє підвищити точність та надійність вимірювань, використовувати прості схемні рішення за рахунок створення вихідних умов початку вимірювань, розподілу армоканатів з розташованими на них силовимірювальними датчиками на окремі групи з виведенням сигналів силовимірювальних датчиків кожної групи на свій аналого-цифровий перетворювач з подальшим передаванням перетворених у цифровий код сигналів силовимірювальних датчиків до оперативно-запам'ятовуючого пристрою комп'ютера, який здійснює послідовне порівняння адекватних індикованих показань робочих датчиків сили, що калібрують з показаннями зразкових засобів вимірювань під час впливу на них заданими зусиллями, при цьому проводять масштабування силовимІрювальноЇ системи, настроювання та калібрування робочих силовимірювальних датчиків, які постійно фіксують натяг армоканатів. Поставлене завдання вирішується тим, що, у відповідності з запропонованим способом, який включає створення механізмом силовведення необхідних зусиль для впливу на силовимірювальні датчики, які визначають зусилля натягу армоканатів, порівняння їх показань з показаннями зразкових засобів вимірювань, - механізмом силовведення (домкратом) створюють певний натяг окремого армоканату, сигнали високоточних силовимірювальних датчиків зразкового засобу вимірювання (контрольної платформи), пропорційні прикладеному зусиллю, передають до аналого-цифрового перетворювача, перетворюють їх у цифрові коди, фіксують їх у показуючому приладі, вводять до оперативно-запам'ятовуючого пристрою комп'ютера; армоканати з встановленими на них силовимірювальними датчиками, розподіляють на окремі групи, вихідні електричні сигнали кожної групи силовимірювальних датчиків передають до аналого-цифрового перетворювача, перетворюють їх у цифрові коди, передають їх до оперативно-запам’ятовуючого пристрою комп'ютера, проводять послідовне опитування кожного каналу аналого-цифрових перетворювачів у часі, запам'ятовують значення зусилля, яке сприймається силовимірювальними датчиками, встановленими на кожному армоканаті, індикують їх, виводять на екран комп'ютера, проводять масштабування силовимірювальної системи, проводять настроювання та калібрування встановлених на армоканатах силовимірювальних датчиків, які постійно визначають натяг армоканатів. Технічним результатом способу є підвищення точності та надійності вимірювання зусиль натягу армоканатів, використання простих схемних рішень, які дозволяють послідовно порівнювати індикoвaнІ показання робочих силовимірювальних датчиків, що калібрують, та зразкових засобів вимірювань під час впливу на них заданим зусиллям, проводити масштабування силовимірювальної системи, настроювання та калібрування робочих силовимірювальних датчиків, які постійно фіксують величину натягу армоканатів. Порівняльний аналіз технічного рішення з іншими, відомими із науково-технічної та патентної літератури, дозволяє виявити ознаки, які відрізняють дане рішення від прототипу, що дає можливість авторам зробити висновок про відповідність вищенаведених ознак критерію "суттєві відміни", який визначає новизну винаходу. На фіг. 1 схематично представлено силовимірювальний пристрій, який реалізує даний спосіб, на фіг. 2 - блок-схема електронної частини пристрою. Силовимірювальний пристрій складається з розташованої на нерухомій опорі 1 контрольної платформи 2 з високоточними силовимірювальними датчиками 3, на яких встановлені зцентровані з ними гідроциліндри 4 домкрата 5. Всередені домкрата 5 розташована гільза 6, на якій змонтовані робочі силовимірювальні датчики 7. У гільзі 6 розташований, жорстко зв'язаний з нею за допомогою ексцентрика 8, армоканат 9, жорстко закріплений у нерухомій опорі 1. Армоканат 9 охоплює палець 10, жорстко закріплений у домкраті 5. Спосіб здійснюється таким чином. За допомогою механізму силовведення (домкрата 5) напружують армоканат 9 певним зусиллям. При цьому, розташовані на гільзі 6 робочі силовимірювальні датчики 7, що калібрують, виробляють електричний сигнал, пропорційний прикладеному зусиллю і передають його до аналогоцифрового перетворювача (АЦП) 11, де перетворюють його у цифровий код та передають до оперативно-запам'ятовуючого пристрою комп'ютера 12. Одночасно зусилля, яке розвивається домкратом 5, сприймається розташованими на контрольній платформі 2 високоточними силовимірювальними датчиками 3, які виробляють сигнал, пропорційний величині прикладеного зусилля, і передають його у аналого-цифровий пepeтвopювач 13, перетворюють його у цифровий код, фіксують його у показуючому приладі 14 і вводять до оперативно-запам'ятовуючого пристрою комп'ютера 12, де проводять масштабування силовимірювальної системи, тобто адекватно порівнюють величину зусилля натягу армоканата 3, яке фіксують зразковими засобами вимірювання - високоточними силовимірювальними датчиками 3 з величиною зусилля натягу армоканата 9, яке постійно визначають встановленими на ньому робочими силовимірювальними датчиками 7 - проводять їх настроювання та калібрування. При цьому, з метою спрощення схемних рішень електронної частини пристрою, який реалізує даний спосіб, армоканати 9 з розташованими на них робочими силовимірювальними датчиками 7 розподіляють на групи (наприклад, по чотири армоканати у одній групі: А1, А2, АЗ, ... Аn). Вихідні сигнали кожної групи силовимірювальних датчиків 7 передають у послідовно з'єднані аналого-цифрові перетворювачі (АЦП1, АЦП2, АЦПЗ, ... АЦПn), перетворюють їх у цифрові коди та передають до оперативно-запам'ятовуючого пристрою комп'ютера 12, проводять послідовне опитування 2 35844 кожного каналу аналого-цифрових перетворювачів у часі, запам'ятовують значення зусиль, які сприймаються силовимірювальними датчиками 7, що встановлюють на кожному армоканаті 9, індикують їх, виводять на екран комп'ютера 12 і проводять масштабування силовимірювальної системи. Таким чином, розподіл армоканатів з розташованими на них силовимірювальними датчиками на групи, підключення їх до аналого-цифрового перетворювача кожної групи з подальшим передаванням перетворених у цифрові коди сигналів силовимірювальних датчиків до комп'ютера 12, куди у свою чергу надходять перетворені у цифрові коди сигнали високоточних силовимірювальних дат чиків 3 контрольної платформи 2 - дозволяє дистанційно провести опитування кожного каналу аналого-цифрових перетворювачів у часі, промасштабувати силовимірювальну систему, провести настроювання і калібрування встановлених на армоканатах 9 робочих силовимірювальних датчиків 7, які постійно визначають зусилля натягу армоканатів 9. Даний спосіб буде використано у мобільній вимірювально-інформаційній системі для контролю зусиль натягу армоканатів СП30 енергоблоків з реакторами типу ВВЕР - 1000 на ЮУАЕС (м. Южноукраїнськ). Фіг.1 3 35844 Фіг.2 __________________________________________________________ ДП "Український інститут промислової власності" (Укрпатент) Україна, 01133, Київ-133, бульв. Лесі Українки, 26 (044) 295-81-42, 295-61-97 __________________________________________________________ Підписано до друку ________ 2001 р. Формат 60х84 1/8. Обсяг ______ обл.-вид. арк. Тираж 50 прим. Зам._______ ____________________________________________________________ УкрІНТЕІ, 03680, Київ-39 МСП, вул. Горького, 180. (044) 268-25-22 ___________________________________________________________ 4
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for remote control of force of tension of armo-cables of nuclear power plant power unit protective shells
Автори англійськоюNikitinskyi Mykhaylo Pavlovych, Abarbarchuk Ihor Azarovych
Назва патенту російськоюСпособ дистанционного контроля усилий натяжения армоканатов защитных оболочек энергоблоков атомных электростанций
Автори російськоюНикитинский Михаил Павлович, Абарбарчук Игорь Азарович
МПК / Мітки
МПК: G01L 1/22
Мітки: спосіб, армоканатів, оболонок, енергоблоків, дистанційного, контролю, зусиль, захисних, атомних, електростанцій, натягу
Код посилання
<a href="https://ua.patents.su/4-35844-sposib-distancijjnogo-kontrolyu-zusil-natyagu-armokanativ-zakhisnikh-obolonok-energoblokiv-atomnikh-elektrostancijj.html" target="_blank" rel="follow" title="База патентів України">Спосіб дистанційного контролю зусиль натягу армоканатів захисних оболонок енергоблоків атомних електростанцій</a>
Спосіб установлення пристрою для вимірювання сили у системі контролю натягу армоканатів захисних оболонок енергоблоків атомних електростанцій
Номер патенту: 31322
Опубліковано: 15.12.2000
Автори: Нікітінський Михайло Павлович, Браз Вадим Давидович, Абарбарчук Ігор Азарович, Орлов Валерій Олександрович
Мітки: захисних, оболонок, армоканатів, атомних, контролю, пристрою, сили, вимірювання, електростанцій, установлення, енергоблоків, натягу, системі, спосіб
Текст:
..., які зв'язані з особливістю конструкції основи , силоутворюючого пристрою (домкратя) та вузла силовведення, які дозволяють здійснити вбудову пристрою у систему армоканатів у похилому положенні , а також в особливості його монтажу та демонтажу на гільзі армоканата,яка за безпечує надійність та необхідну точність вимірювання натягу кож ного армокаката. Порівняльний аналіз технічного рішення, що заявляється з Іншими, відомими Із...
Спосіб калібрування та повірки силовимірювальних датчиків у системі контролю натягу армоканатів
Номер патенту: 31547
Опубліковано: 15.12.2000
Автори: Абарбарчук Ігор Азарович, Браз Вадим Давидович, Нікітінський Михайло Павлович, Орлов Валерій Олександрович
МПК: G01L 1/22
Мітки: натягу, калібрування, системі, армоканатів, силовимірювальних, спосіб, датчиків, контролю, повірки
Текст:
...Індуктованих показань силовимірювального датчика , що ка лібрують та зразкових засобів вимірювань під час впливу на них з £ даних зусиль, провести точне масштабування апаратури Індикації СІ ловимірювальних датчиків, що калібрують, яке надає їм можливість з необхідною точністю постійно визначати натяг армоканату . Новина способу полягас у створенні таких вихідних умов для п чатку вимірювань, зв'язаних з особливостями вбудови...
Пристрій для очистки потоків паро-газових сумішей, утворюючихся при сбросі надлишкового давління з-під захисних оболонок атомних електростанцій
Номер патенту: 7037
Опубліковано: 31.03.1995
Автор: Бернд Екардт
МПК: G21F 9/02
Мітки: потоків, паро-газових, давління, надлишкового, захисних, сумішей, оболонок, сбросі, з-під, очистки, атомних, пристрій, утворюючихся, електростанцій
Формула / Реферат:
Формула изобретения1. Устройство для очистки потоков парогазовых смесей, образующихся при сбросе избыточного давления из-под защитных оболочек атомных электростанций, включающее резервуар высокого давления с моющим раствором, моющие устройства Вентури, расположенные внутри резервуара высокого давления в объеме моющего раствора, каплеотделители и волокнистые фильтры, отличающееся тем, что, с целью повышения эффективности очистки...
Пристрій для вимірювання сили
Номер патенту: 31321
Опубліковано: 15.12.2000
Автори: Браз Вадим Давидович, Нікітінський Михайло Павлович, Орлов Валерій Олександрович
Мітки: сили, вимірювання, пристрій
Текст:
...розміщені вертикальні шпильки з встановленими на них тарільчатими пружинами з можливістю їх стискання» -ЗПорівняльний аналіз технічного рішення» що заявляється з Іншими відомими Із назгково-технічної та патентної літератури рішен нями, дозволяє виявити ознаки» що відрізняють заявлене технічне рішення віл прототипу, що дає можливість авторам зробити висновок про ВІДПОВІДНІСТЬ заявлених ознак критерію "суттєві ВІДМІНИ11, який визначає...
Спосіб контролю герметичності оболонок тепловидільних елементів ядерного енергетичного реактора і пристрій для його здійснення
Номер патенту: 30835
Опубліковано: 15.12.2000
Автори: Назаренко Аскольд Федорович, Максимов Максим Вітальович, Білей Данко Васильович, Покора Ігор Миколайович, Давиденко Леонід Андрійович
МПК: G01N 29/04
Мітки: реактора, тепловидільних, елементів, ядерного, контролю, пристрій, герметичності, енергетичного, спосіб, здійснення, оболонок
Текст:
...герметичності оболонок тепловидільних елементів ядерного енергетичного реактора і, таким чином, забезпечити експресаналіз герметичності оболонок, спростити обробку вимірювань та зменшити енергетичні витрати. В основу винаходу також поставлено завдання створити такий пристрій для здійснення запропонованого способу, у якому нова конструкція і нові зв'язки дозволяють зменшити енергетичні затрати та скоротити час проведення контролю....
Попередній патент: Трансформатор з магнітомеханічною передачею
Наступний патент: Пристрій для адаптивного керування процесом металообробки
Випадковий патент: Буронабивна паля