Електромеханічний дезінтегратор
Номер патенту: 43635
Опубліковано: 25.08.2009
Автори: Лисак Вікторія Володимирівна, Вахновецька Марія Олександрівна, Августинович Анна Анатоліївна, Шинкаренко Василь Федорович
Формула / Реферат
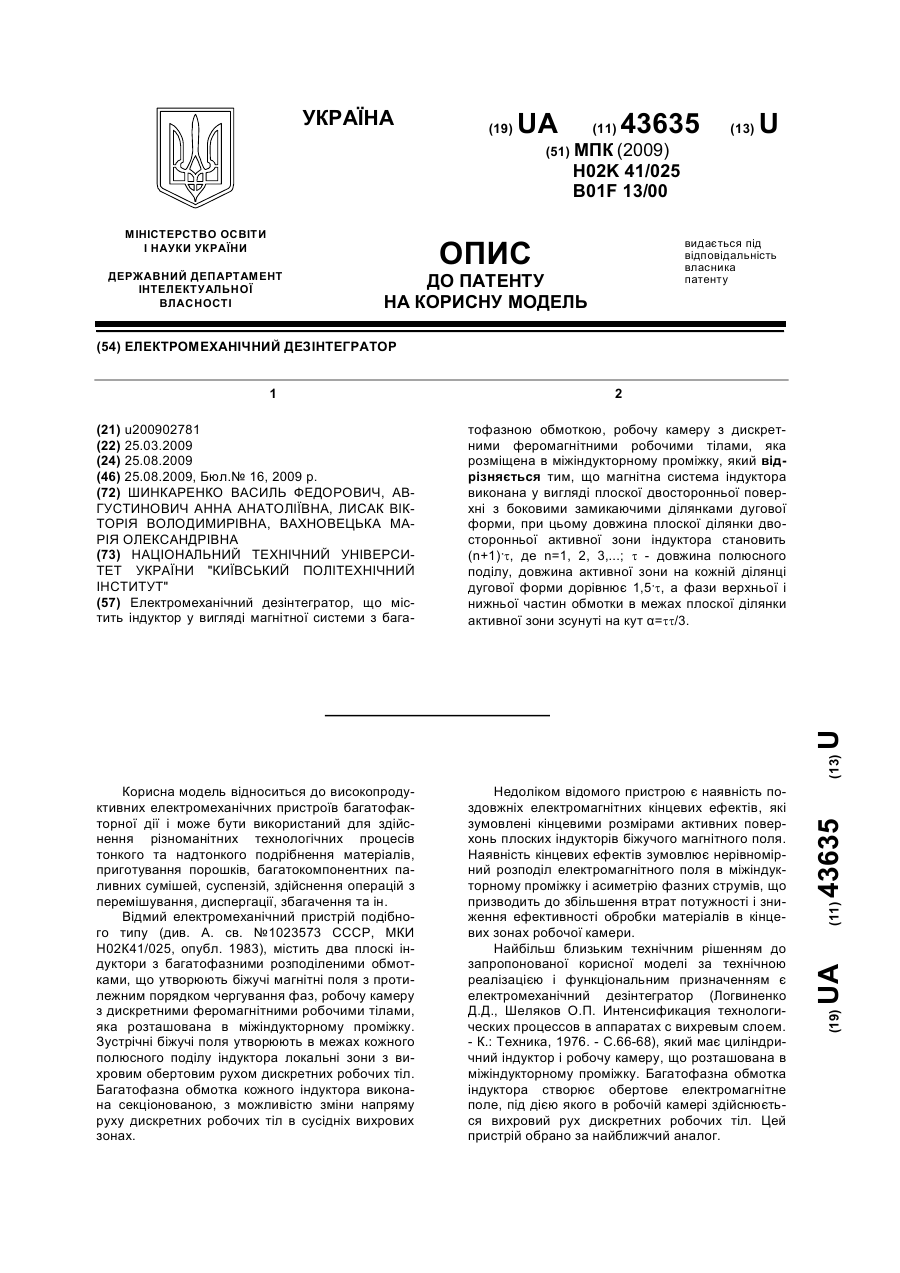
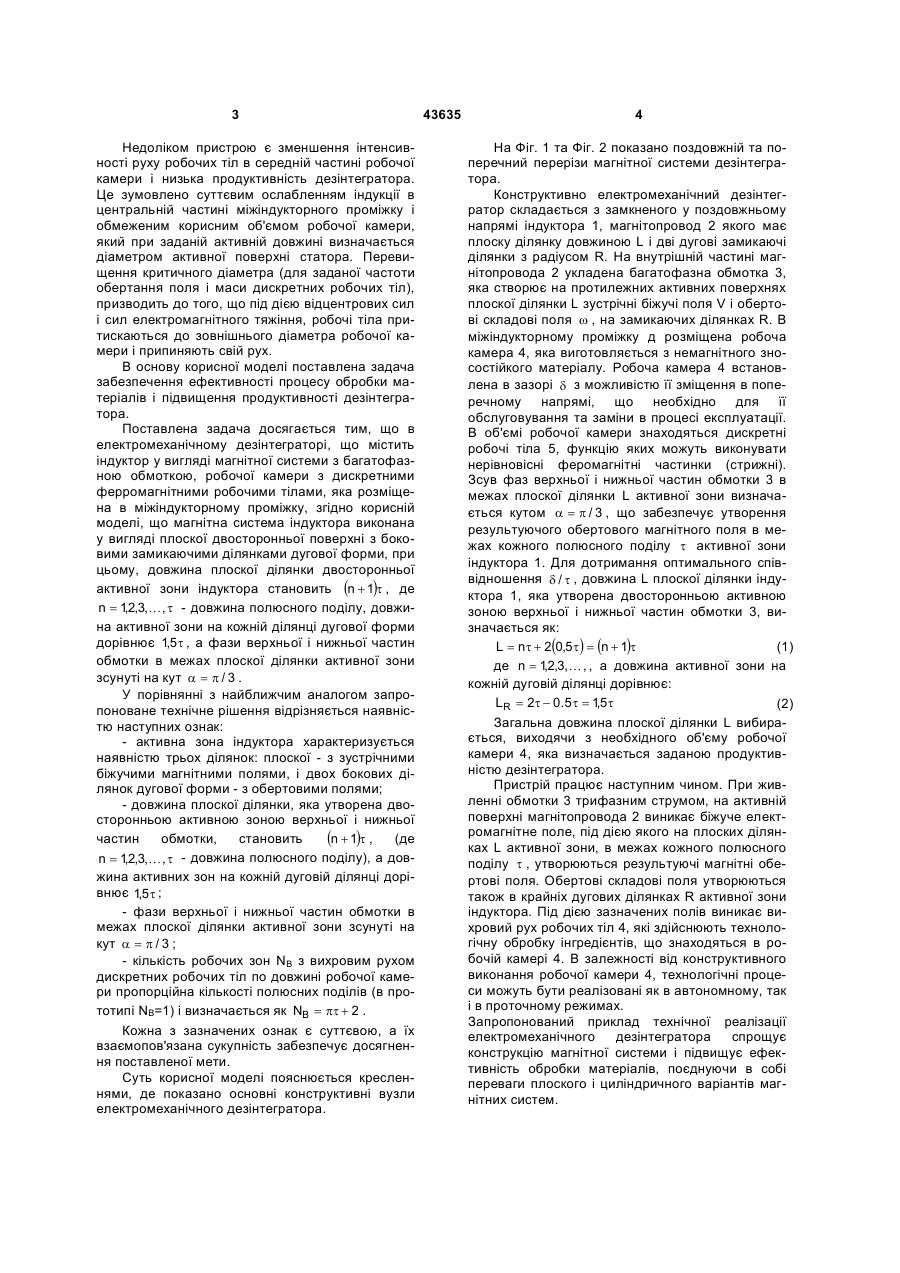
Електромеханічний дезінтегратор, що містить індуктор у вигляді магнітної системи з багатофазною обмоткою, робочу камеру з дискретними феромагнітними робочими тілами, яка розміщена в міжіндукторному проміжку, який відрізняється тим, що магнітна система індуктора виконана у вигляді плоскої двосторонньої поверхні з боковими замикаючими ділянками дугової форми, при цьому довжина плоскої ділянки двосторонньої активної зони індуктора становить (n+1)·τ, де n=1, 2, 3,...; τ - довжина полюсного поділу, довжина активної зони на кожній ділянці дугової форми дорівнює 1,5·τ, а фази верхньої і нижньої частин обмотки в межах плоскої ділянки активної зони зсунуті на кут α=π/3.
Текст
Електромеханічний дезінтегратор, що містить індуктор у вигляді магнітної системи з бага 3 Недоліком пристрою є зменшення інтенсивності руху робочих тіл в середній частині робочої камери і низька продуктивність дезінтегратора. Це зумовлено суттєвим ослабленням індукції в центральній частині міжіндукторного проміжку і обмеженим корисним об'ємом робочої камери, який при заданій активній довжині визначається діаметром активної поверхні статора. Перевищення критичного діаметра (для заданої частоти обертання поля і маси дискретних робочих тіл), призводить до того, що під дією відцентрових сил і сил електромагнітного тяжіння, робочі тіла притискаються до зовнішнього діаметра робочої камери і припиняють свій рух. В основу корисної моделі поставлена задача забезпечення ефективності процесу обробки матеріалів і підвищення продуктивності дезінтегратора. Поставлена задача досягається тим, що в електромеханічному дезінтеграторі, що містить індуктор у вигляді магнітної системи з багатофазною обмоткою, робочої камери з дискретними ферромагнітними робочими тілами, яка розміщена в міжіндукторному проміжку, згідно корисній моделі, що магнітна система індуктора виконана у вигляді плоскої двосторонньої поверхні з боковими замикаючими ділянками дугової форми, при цьому, довжина плоскої ділянки двосторонньої активної зони індуктора становить (n + 1)t , де n = 1 2,3,K , t - довжина полюсного поділу, довжи, на активної зони на кожній ділянці дугової форми дорівнює 1,5 t , а фази верхньої і нижньої частин обмотки в межах плоскої ділянки активної зони зсунуті на кут a = p / 3 . У порівнянні з найближчим аналогом запропоноване технічне рішення відрізняється наявністю наступних ознак: - активна зона індуктора характеризується наявністю трьох ділянок: плоскої - з зустрічними біжучими магнітними полями, і двох бокових ділянок дугової форми - з обертовими полями; - довжина плоскої ділянки, яка утворена двосторонньою активною зоною верхньої і нижньої частин обмотки, становить (n + 1)t , (де n 1 2,3,K , t - довжина полюсного поділу), а дов= , жина активних зон на кожній дуговій ділянці дорівнює 1,5 t ; - фази верхньої і нижньої частин обмотки в межах плоскої ділянки активної зони зсунуті на кут a = p / 3 ; - кількість робочих зон NB з вихровим рухом дискретних робочих тіл по довжині робочої камери пропорційна кількості полюсних поділів (в прототипі NB=1) і визначається як NB = pt + 2 . Кожна з зазначених ознак є суттєвою, а їх взаємопов'язана сукупність забезпечує досягнення поставленої мети. Суть корисної моделі пояснюється кресленнями, де показано основні конструктивні вузли електромеханічного дезінтегратора. 43635 4 На Фіг. 1 та Фіг. 2 показано поздовжній та поперечний перерізи магнітної системи дезінтегратора. Конструктивно електромеханічний дезінтегратор складається з замкненого у поздовжньому напрямі індуктора 1, магнітопровод 2 якого має плоску ділянку довжиною L і дві дугові замикаючі ділянки з радіусом R. На внутрішній частині магнітопровода 2 укладена багатофазна обмотка 3, яка створює на протилежних активних поверхнях плоскої ділянки L зустрічні біжучі поля V і обертові складові поля w , на замикаючих ділянках R. В міжіндукторному проміжку д розміщена робоча камера 4, яка виготовляється з немагнітного зносостійкого матеріалу. Робоча камера 4 встановлена в зазорі d з можливістю її зміщення в поперечному напрямі, що необхідно для її обслуговування та заміни в процесі експлуатації. В об'ємі робочої камери знаходяться дискретні робочі тіла 5, функцію яких можуть виконувати нерівновісні феромагнітні частинки (стрижні). Зсув фаз верхньої і нижньої частин обмотки 3 в межах плоскої ділянки L активної зони визначається кутом a = p / 3 , що забезпечує утворення результуючого обертового магнітного поля в межах кожного полюсного поділу t активної зони індуктора 1. Для дотримання оптимального співвідношення d / t , довжина L плоскої ділянки індуктора 1, яка утворена двосторонньою активною зоною верхньої і нижньої частин обмотки 3, визначається як: L = nt + 2(0,5t) = (n + 1)t (1) де n = 1 2,3, K , , а довжина активної зони на , кожній дуговій ділянці дорівнює: LR = 2t - 0.5t = 15t , (2) Загальна довжина плоскої ділянки L вибирається, виходячи з необхідного об'єму робочої камери 4, яка визначається заданою продуктивністю дезінтегратора. Пристрій працює наступним чином. При живленні обмотки 3 трифазним струмом, на активній поверхні магнітопровода 2 виникає біжуче електромагнітне поле, під дією якого на плоских ділянках L активної зони, в межах кожного полюсного поділу t , утворюються результуючі магнітні обертові поля. Обертові складові поля утворюються також в крайніх дугових ділянках R активної зони індуктора. Під дією зазначених полів виникає вихровий рух робочих тіл 4, які здійснюють технологічну обробку інгредієнтів, що знаходяться в робочій камері 4. В залежності від конструктивного виконання робочої камери 4, технологічні процеси можуть бути реалізовані як в автономному, так і в проточному режимах. Запропонований приклад технічної реалізації електромеханічного дезінтегратора спрощує конструкцію магнітної системи і підвищує ефективність обробки матеріалів, поєднуючи в собі переваги плоского і циліндричного варіантів магнітних систем. 5 Комп’ютерна верстка Н. Лиcенко 43635 6 Підписне Тираж 28 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюElectromechanical desintegrator
Автори англійськоюShynkarenko Vasyl Fedorovych, Avhustynovych Anna Anatoliivna, Lysak Viktoriia Volodymyrivna, Vakhnovetska Mariia Oleksandrivna
Назва патенту російськоюЭлектромеханический дезинтегратор
Автори російськоюШинкаренко Василий Федорович, Августинович Анна Анатольевна, Лысак Виктория Владимировна, Вахновецкая Мария АлександрОвна
МПК / Мітки
МПК: B01F 13/00, H02K 41/025
Мітки: електромеханічний, дезінтегратор
Код посилання
<a href="https://ua.patents.su/3-43635-elektromekhanichnijj-dezintegrator.html" target="_blank" rel="follow" title="База патентів України">Електромеханічний дезінтегратор</a>
Дезінтегратор
Номер патенту: 1659
Опубліковано: 17.03.2003
Автор: Сидоренко Станіслав Дмитрович
МПК: B02C 13/22
Мітки: дезінтегратор
Формула / Реферат:
Дезінтегратор, що містить корпус, завантажувальну лійку, розвантажувальний патрубок і співвісно встановлені диски з розміщеними на них по концентричних окружностях рядами ударних пальців, який відрізняється тим, що його корпус виконаний завиткоподібним, а диски встановлені в корпусі з утворенням між ним і прилеглим до нього рядом ударних пальців завиткоподібної порожнини, що розширюється у бік розвантажувального патрубка.
Дезінтегратор
Номер патенту: 18128
Опубліковано: 16.10.2006
Автори: Зузанський Юрій Мечиславович, Жердицький Віктор Юстимович
МПК: B03B 5/32, B02C 13/20, B02C 19/06
Мітки: дезінтегратор
Формула / Реферат:
1. Дезінтегратор для помелу сипучих матеріалів, що містить циліндричний корпус із завантажувальним патрубком і отвором для вивантаження великих частинок із шибером, кришку з патрубком для відбору дрібних частинок на циклон із закріпленими в ній пальцями-билами і водоміром, сорочки охолодження з патрубками подачі стиснутого повітря і зливу охолодної води, верхню робочу камеру і нижню робочу камеру, які розділені горизонтальною перегородкою з...
Дезінтегратор
Номер патенту: 3143
Опубліковано: 15.10.2004
Автор: Мікульонок Ігор Олегович
Мітки: дезінтегратор
Формула / Реферат:
1. Дезінтегратор, що містить корпус з патрубками і змонтованим у його порожнині валом із закріпленими на ньому по його довжині відрізками дроту, який відрізняється тим, що відрізки дроту закріплені на валу з утворенням просторової спіралі.2. Дезінтегратор за п. 1, який відрізняється тим, що спіраль виконана зі змінним кроком витків.3. Дезінтегратор за п. 1 або 2, який відрізняється тим, що він містить додатковий вал,...
Дезінтегратор струминний
Номер патенту: 27078
Опубліковано: 10.10.2007
Автори: Михайленко Михайло Володимирович, Щипанова Олена Валеріївна, Пономаренко Дмитро Іванович
МПК: B28C 1/00
Мітки: дезінтегратор, струминний
Формула / Реферат:
1. Дезінтегратор струминний, що містить бункер вихідної сировини, живильники, сопла, помольну камеру, систему пилоосадження, який відрізняється тим, що бункер вихідної сировини оснащений живильниками, розміщеними в корпусах приймачів із зустрічно-направленими розгінними камерами, виконаними з можливістю зміни відстані між їхніми устями й кута нахилу відносно одна одної та горизонтальної площини і оснащеними соплами-здрібнювачами, з'єднаними...
Дезінтегратор
Номер патенту: 24750
Опубліковано: 10.07.2007
Автори: Ревенко Іван Іванович, Потапова Світлана Євгеніївна
МПК: B02C 13/22
Мітки: дезінтегратор
Формула / Реферат:
Дезінтегратор, що включає корпус, в якому співвісно розміщені два штифтові ротори з можливістю обертання в протилежні боки, встановлений в пустотілому валу шнековий живильник та розвантажувальний патрубок, який відрізняється тим, що нерухомий кожух шнека-живильника заходить в пустотілий вал на величину довжини цього вала, а вивантажувальний патрубок виконано на всю ширину робочої камери.
Попередній патент: Мікропроцесорна система із захистом інформації від зчитування за струмом споживання
Наступний патент: Глушник шуму газового струменя
Випадковий патент: Мембранний блок компресора