Грунтообробний робочий орган
Номер патенту: 46162
Опубліковано: 10.12.2009
Автори: Хейло Михайло Іванович, Лозовський Олександр Сергійович, Браженко Світлана Анатоліївна, Лозовський Анатолій Петрович, Канівець Олександр Васильович, Прасолов Євген Якович

Формула / Реферат
1. Ґрунтообробний орган, який має стовбу і двосторонню розпушувальну лапу, кінці крил якої розташовані під кутом, більшим відносно напряму руху, який відрізняється тим, що робоча поверхня лапи, виконана у вигляді криволінійної поверхні переносу, має по ширині захвату змінний гострий кут розхилу крил, при цьому лапа може здійснювати коливальний рух від механізму привода з заданими амплітудою і частотою коливань в горизонтальній площині відносно вертикальної, яка перпендикулярна до напрямку руху.
2. Ґрунтообробний робочий орган за п.1, який відрізняється тим, що криволінійна поверхня переносу лапи виконана у вигляді циліндричних поверхонь, отриманих по ввігнутій кривій в її передній частині, по прямій центральній частині і по випуклій кривій в її задній частині, а кінці крил лапи розташовані під гострим кутом до напряму руху, який в два рази більший кута розхилу носової частини, при цьому ширина захвату носка лапи в 2,5 рази менше ширини захвату лапи, а ширина носової частини передньої різальної кромки складає її десяту частину.
3. Ґрунтообробний робочий орган за п. 1, п. 2, який відрізняється тим, що профіль стовби, вісь, якої співпадає з віссю обертання лапи в поперечному перерізі має форму кола, причому вісь стовби проходить через точку перерізу крайніх твірних ділянки циліндричної поверхні в передній частині крил.
Текст
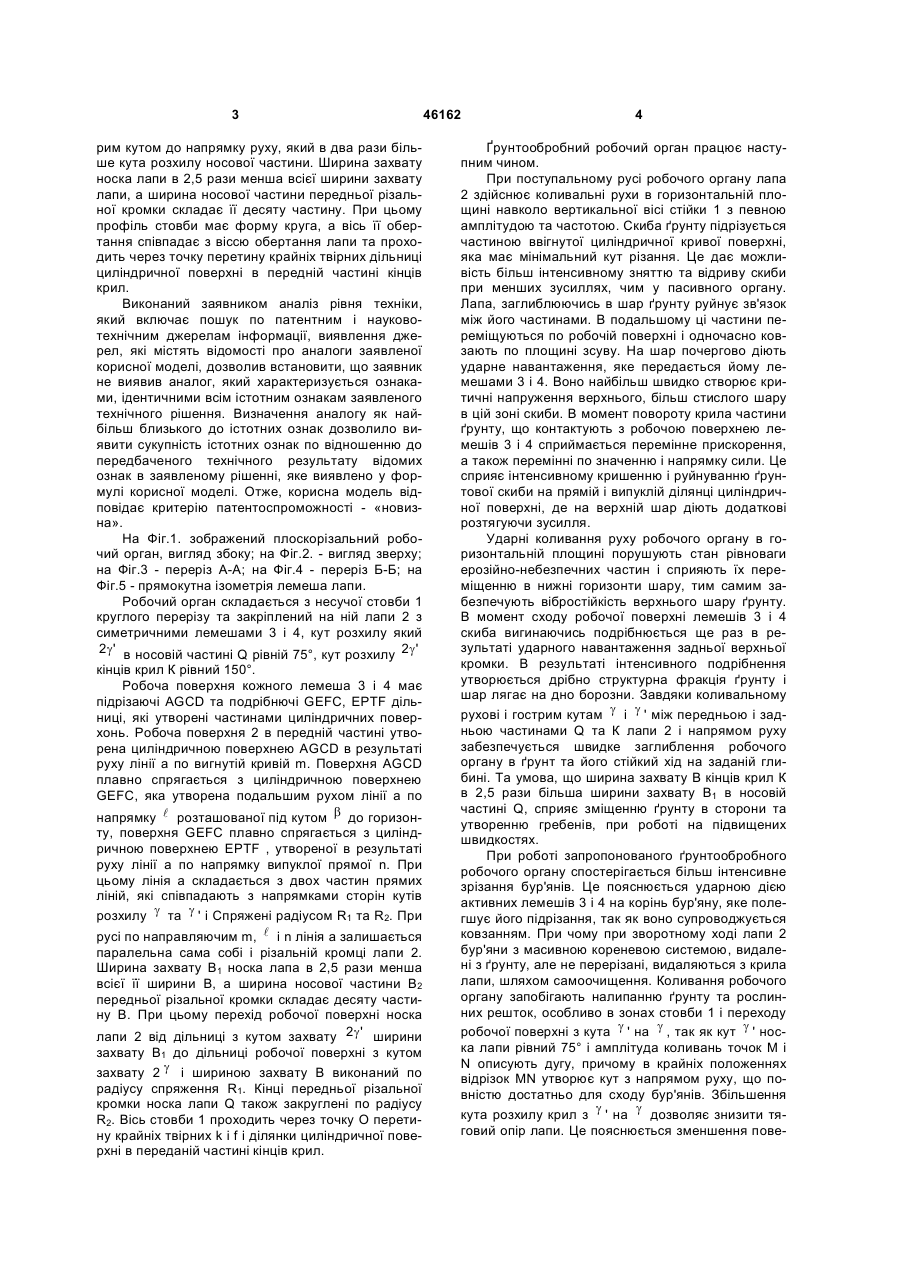
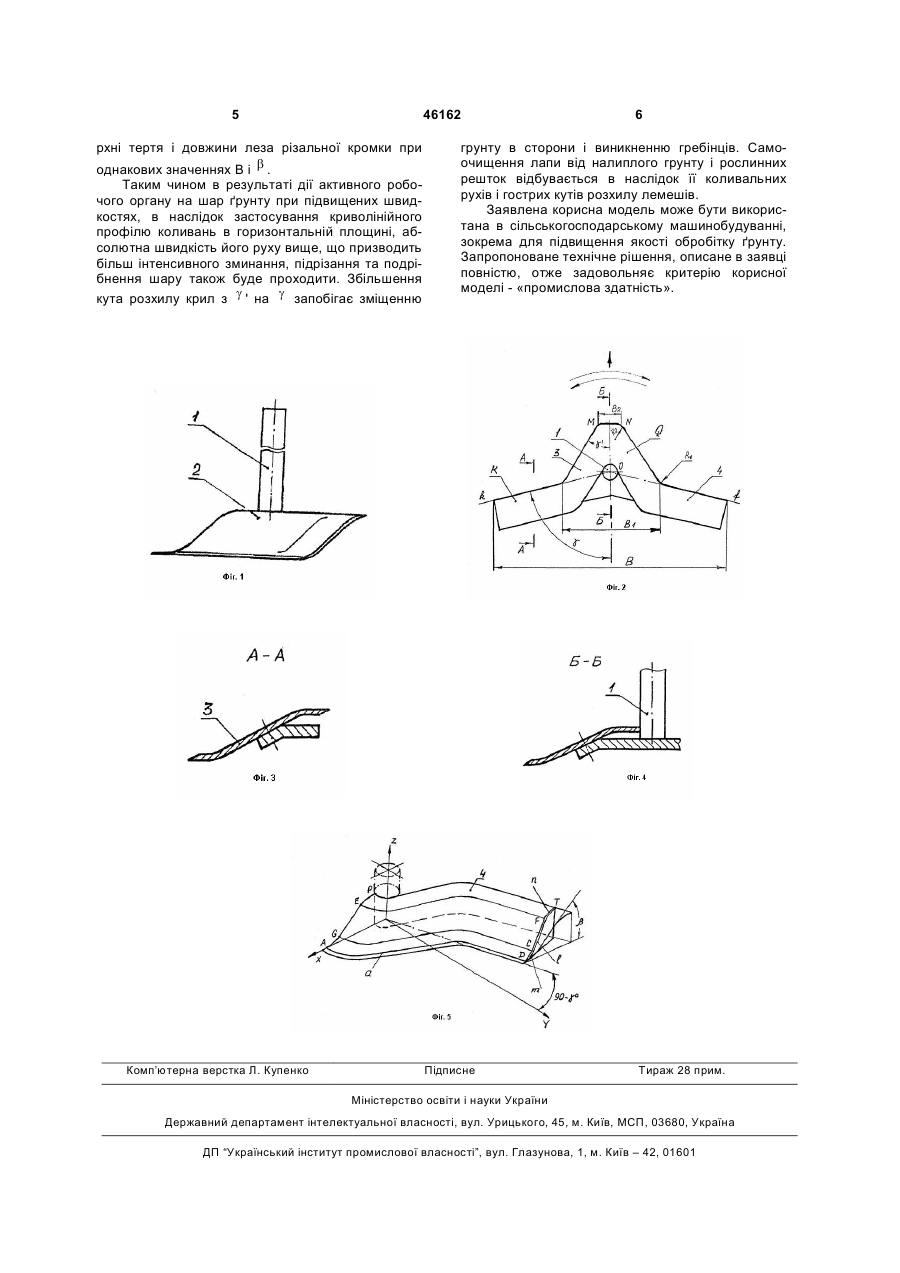
1. Ґрунтообробний орган, який має стовбу і двосторонню розпушувальну лапу, кінці крил якої розташовані під кутом, більшим відносно напряму руху, який відрізняється тим, що робоча поверхня лапи, виконана у вигляді криволінійної поверхні переносу, має по ширині захвату змінний гострий кут розхилу крил, при цьому лапа може здійснювати коливальний рух від механізму привода з заданими амплітудою і частотою коливань в горизонтальній площині відносно вертикальної, яка перпендикулярна до напрямку руху. 3 рим кутом до напрямку руху, який в два рази більше кута розхилу носової частини. Ширина захвату носка лапи в 2,5 рази менша всієї ширини захвату лапи, а ширина носової частини передньої різальної кромки складає її десяту частину. При цьому профіль стовби має форму круга, а вісь її обертання співпадає з віссю обертання лапи та проходить через точку перетину крайніх твірних дільниці циліндричної поверхні в передній частині кінців крил. Виконаний заявником аналіз рівня техніки, який включає пошук по патентним і науковотехнічним джерелам інформації, виявлення джерел, які містять відомості про аналоги заявленої корисної моделі, дозволив встановити, що заявник не виявив аналог, який характеризується ознаками, ідентичними всім істотним ознакам заявленого технічного рішення. Визначення аналогу як найбільш близького до істотних ознак дозволило виявити сукупність істотних ознак по відношенню до передбаченого технічного результату відомих ознак в заявленому рішенні, яке виявлено у формулі корисної моделі. Отже, корисна модель відповідає критерію патентоспроможності - «новизна». На Фіг.1. зображений плоскорізальний робочий орган, вигляд збоку; на Фіг.2. - вигляд зверху; на Фіг.3 - переріз А-А; на Фіг.4 - переріз Б-Б; на Фіг.5 - прямокутна ізометрія лемеша лапи. Робочий орган складається з несучої стовби 1 круглого перерізу та закріплений на ній лапи 2 з симетричними лемешами 3 і 4, кут розхилу який 2g ' в носовій частині Q рівній 75°, кут розхилу 2g ' кінців крил К рівний 150°. Робоча поверхня кожного лемеша 3 і 4 має підрізаючі AGCD та подрібнючі GEFC, EPTF дільниці, які утворені частинами циліндричних поверхонь. Робоча поверхня 2 в передній частині утворена циліндричною поверхнею AGCD в результаті руху лінії а по вигнутій кривій m. Поверхня AGCD плавно спрягається з циліндричною поверхнею GEFC, яка утворена подальшим рухом лінії а по напрямку l розташованої під кутом b до горизонту, поверхня GEFC плавно спрягається з циліндричною поверхнею EPTF , утвореної в результаті руху лінії а по напрямку випуклої прямої n. При цьому лінія а складається з двох частин прямих ліній, які співпадають з напрямками сторін кутів розхилу g та g ' і Спряжені радіусом R1 та R2. При русі по направляючим m, l і n лінія а залишається паралельна сама собі і різальній кромці лапи 2. Ширина захвату В1 носка лапа в 2,5 рази менша всієї її ширини В, а ширина носової частини В2 передньої різальної кромки складає десяту частину В. При цьому перехід робочої поверхні носка лапи 2 від дільниці з кутом захвату 2g ' ширини захвату В1 до дільниці робочої поверхні з кутом захвату 2 g і шириною захвату В виконаний по радіусу спряження R1. Кінці передньої різальної кромки носка лапи Q також закруглені по радіусу R2. Вісь стовби 1 проходить через точку О перетину крайніх твірних k і f і ділянки циліндричної поверхні в переданій частині кінців крил. 46162 4 Ґрунтообробний робочий орган працює наступним чином. При поступальному русі робочого органу лапа 2 здійснює коливальні рухи в горизонтальній площині навколо вертикальної вісі стійки 1 з певною амплітудою та частотою. Скиба ґрунту підрізується частиною ввігнутої циліндричної кривої поверхні, яка має мінімальний кут різання. Це дає можливість більш інтенсивному зняттю та відриву скиби при менших зусиллях, чим у пасивного органу. Лапа, заглиблюючись в шар ґрунту руйнує зв'язок між його частинами. В подальшому ці частини переміщуються по робочій поверхні і одночасно ковзають по площині зсуву. На шар почергово діють ударне навантаження, яке передається йому лемешами 3 і 4. Воно найбільш швидко створює критичні напруження верхнього, більш стислого шару в цій зоні скиби. В момент повороту крила частини ґрунту, що контактують з робочою поверхнею лемешів 3 і 4 сприймається перемінне прискорення, а також перемінні по значенню і напрямку сили. Це сприяє інтенсивному кришенню і руйнуванню ґрунтової скиби на прямій і випуклій ділянці циліндричної поверхні, де на верхній шар діють додаткові розтягуючи зусилля. Ударні коливання руху робочого органу в горизонтальній площині порушують стан рівноваги ерозійно-небезпечних частин і сприяють їх переміщенню в нижні горизонти шару, тим самим забезпечують вібростійкість верхнього шару ґрунту. В момент сходу робочої поверхні лемешів 3 і 4 скиба вигинаючись подрібнюється ще раз в результаті ударного навантаження задньої верхньої кромки. В результаті інтенсивного подрібнення утворюється дрібно структурна фракція ґрунту і шар лягає на дно борозни. Завдяки коливальному рухові і гострим кутам g і g ' мiж передньою і задньою частинами Q та К лапи 2 і напрямом руху забезпечується швидке заглиблення робочого органу в ґрунт та його стійкий хід на заданій глибині. Та умова, що ширина захвату В кінців крил К в 2,5 рази більша ширини захвату B1 в носовій частині Q, сприяє зміщенню ґрунту в сторони та утворенню гребенів, при роботі на підвищених швидкостях. При роботі запропонованого ґрунтообробного робочого органу спостерігається більш інтенсивне зрізання бур'янів. Це пояснюється ударною дією активних лемешів 3 і 4 на корінь бур'яну, яке полегшує його підрізання, так як воно супроводжується ковзанням. При чому при зворотному ході лапи 2 бур'яни з масивною кореневою системою, видалені з ґрунту, але не перерізані, видаляються з крила лапи, шляхом самоочищення. Коливання робочого органу запобігають налипанню ґрунту та рослинних решток, особливо в зонах стовби 1 і переходу робочої поверхні з кута g ' на g , так як кут g ' носка лапи рівний 75° і амплітуда коливань точок М і N описують дугу, причому в крайніх положеннях відрізок MN утворює кут з напрямом руху, що повністю достатньо для сходу бур'янів. Збільшення кута розхилу крил з g ' на g дозволяє знизити тяговий опір лапи. Це пояснюється зменшення пове 5 46162 рхні тертя і довжини леза різальної кромки при однакових значеннях В і b . Таким чином в результаті дії активного робочого органу на шар ґрунту при підвищених швидкостях, в наслідок застосування криволінійного профілю коливань в горизонтальній площині, абсолютна швидкість його руху вище, що призводить більш інтенсивного зминання, підрізання та подрібнення шару також буде проходити. Збільшення кута розхилу крил з g ' на g запобігає зміщенню Комп’ютерна верстка Л. Купенко 6 грунту в сторони і виникненню гребінців. Самоочищення лапи від налиплого грунту і рослинних решток відбувається в наслідок її коливальних рухів і гострих кутів розхилу лемешів. Заявлена корисна модель може бути використана в сільськогосподарському машинобудуванні, зокрема для підвищення якості обробітку ґрунту. Запропоноване технічне рішення, описане в заявці повністю, отже задовольняє критерію корисної моделі - «промислова здатність». Підписне Тираж 28 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюSoil-cultivating working element
Автори англійськоюKheilo Mykhailo Ivanovych, Prasolov Yevhen Yakovych, Brazhenko Svitlana Anatolivna, Lozovskyi Anatolii Petrovych, Lozovskyi Oleksandr Serhiiovych, Kanivets Oleksandr Vasyliovych
Назва патенту російськоюПочвообрабатывающий рабочий орган
Автори російськоюХейло Михаил Иванович, Прасолов Евгений Яковлевич, Браженко Светлана Анатольевна, Лозовский Анатолий Петрович, Лозовский Александр Сергеевич, Канивец Александр Васильевич
МПК / Мітки
МПК: A01B 13/08
Мітки: орган, робочий, грунтообробний
Код посилання
<a href="https://ua.patents.su/3-46162-gruntoobrobnijj-robochijj-organ.html" target="_blank" rel="follow" title="База патентів України">Грунтообробний робочий орган</a>
Робочий орган культиватора
Номер патенту: 33381
Опубліковано: 25.06.2008
Автори: Катюха Денис Анатолійович, Кошевой Максим Олександрович
МПК: A01B 39/00, A01B 35/28
Мітки: культиватора, орган, робочий
Формула / Реферат:
1. Робочий орган культиватора, що містить раму з закріпленою на ній порожнистою стійкою, всередині якої розташований вертикальний вал, нерухомо з'єднаний внизу з крилом рухомої плоскорізальної лапи, в верхній частині вал має привід, який відрізняється тим, що в нижній частині стійки закріплене нерухоме крило плоскорізальної лапи.2. Робочий орган культиватора за п. 1, який відрізняється тим, що крила лапи утворюють перед стійкою кут...
Комбінований грунтообробний робочий орган
Номер патенту: 43157
Опубліковано: 15.11.2001
Автори: Матвєєв Кузьма Дмитрович, Шмат Сергій Іванович, Воротнюк Валентин Володимирович, Сало Василь Михайлович, Богатирьов Дмитро Володимирович
МПК: A01B 79/00
Мітки: робочий, комбінований, грунтообробний, орган
Формула / Реферат:
1. Комбінований грунтообробний робочий орган, який має стояки, підошву і наральник з крилами, який відрізняється тим, що робочий орган виконаний із двох і більше лап-наральників з розміщенням їх один під одним зі зміщенням кожного нижчого наральника в бік, протилежний напрямку руху щілиноріза, причому поздовжня відстань між кожною парою наральників визначається за формулою: L = h/ tgj, де h...
Грунтообробний робочий орган культиватора регульований
Номер патенту: 23618
Опубліковано: 11.06.2007
Автор: Атрощенко Володимир Іванович
МПК: A01B 35/20
Мітки: орган, грунтообробний, культиватора, робочий, регульованій
Формула / Реферат:
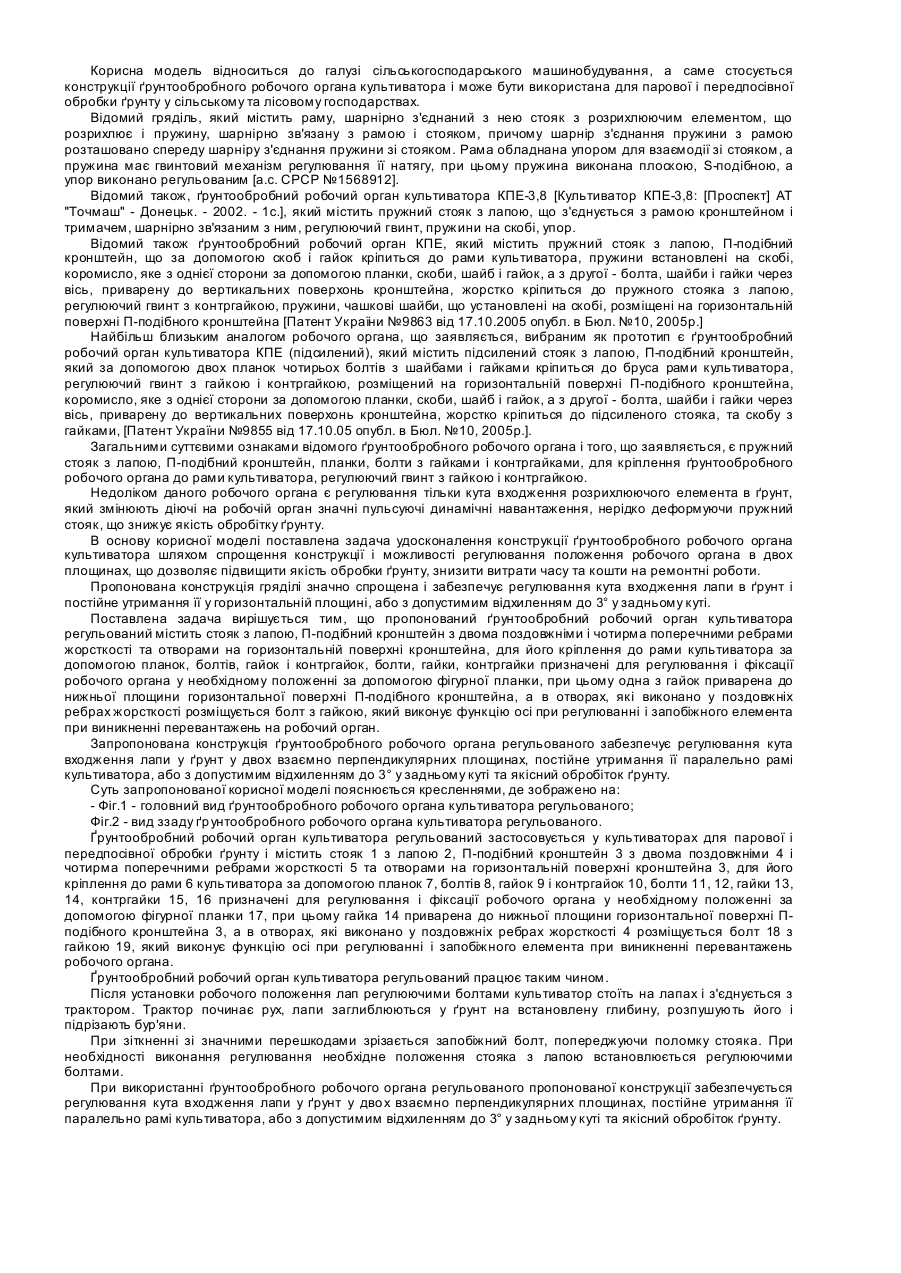
Ґрунтообробний робочий орган культиватора регульований, що містить пружний стояк з лапою, П-подібний кронштейн, планки, болти з гайками і контргайками, для кріплення ґрунтообробного робочого органа до рами культиватора, регулюючий гвинт з гайкою і контргайкою, який відрізняється тим, що П-подібний кронштейн виконано з двома поздовжніми і чотирма поперечними ребрами жорсткості та отворами на горизонтальній поверхні кронштейна, де розміщуються...
Грунтообробний робочий орган культиватора кпе
Номер патенту: 9863
Опубліковано: 17.10.2005
Автор: Атрощенко Володимир Іванович
МПК: A01B 35/20
Мітки: кпе, робочий, культиватора, орган, грунтообробний
Формула / Реферат:
Ґрунтообробний робочий орган культиватора, що містить пружний стояк з лапою, кронштейн, пружини, встановлені на скобі, та регулювальний гвинт, який відрізняється тим, що містить П-подібний кронштейн, який за допомогою скоб і гайок кріпиться до рами культиватора, коромисло, яке з однієї сторони за допомогою планки, скоби, шайб і гайок, а з другої - болта, шайби і гайки через вісь, приварену до вертикальних поверхонь кронштейна, жорстко...
Робочий орган для обробітку ґрунту
Номер патенту: 28641
Опубліковано: 25.12.2007
Автори: Сокол Сергій Петрович, Корабельський Валерій Іванович, Адамчук Валерій Васильович, Погорілий Віктор Васильович, Кобець Анатолій Степанович
МПК: A01B 13/16
Мітки: обробітку, орган, ґрунту, робочий
Формула / Реферат:
Робочий орган для обробітку ґрунту, який містить стояк, праву і ліву лапи, який відрізняється тим, що стояк і лапи виготовлені з однієї площинної заготовки прямокутної форми шляхом безвідходного розкрою нижньої частини заготовки і відгину однієї частини вліво, а другої вправо таким чином, що площина лапи нахилена різальною кромкою під кутом 12°-15° до горизонту, а кут розхилу лап становить в межах 90°-100°, причому стояк нахилено в...
Попередній патент: Спосіб різання харчових продуктів охолодженим струменем води
Наступний патент: Спосіб різання харчових продуктів охолодженим струменем води, що переривається