Спосіб формування модульованої завади
Номер патенту: 46162
Опубліковано: 15.05.2002
Формула / Реферат
1. Спосіб формування модульованої завади, здійснюваного на частоті, близькій до частоти сигналу оптико-електронного пристрою, що подавляється, який відрізняється тим, що здійснюють модуляцію потужного інфрачервоного випромінювача послідовністю нерегулярних пачок імпульсів, заповнених регулярною модулюючою частотою.
2. Спосіб за п. 1, який відрізняється тим, що нерегулярність пачок імпульсів задають за допомогою змінних коефіцієнтів керування і періодів повторення, і таким чином передбачають заздалегідь траєкторію виходу зображення об'єкта з поля зору оптико-електронного пристрою.
3. Спосіб за п. 1 або 2, який відрізняється тим, що нерегулярність пачок імпульсів виражають за допомогою змінних коефіцієнтів керування Кn = tі - ti+1 / tі + ti+1, де tі - тривалість пачки, заповненої регулярною модулюючою частотою і tі+1 - тривалість паузи, і періодів повторення Тn, при цьому коефіцієнт керування може змінюватися від К1 до Кn протягом циклу керування, і цикли повторюються протягом всього процесу подавляння, а період регулярної модулюючої частоти значно відрізняється від періоду несучої частоти і його вибирають в 12...24 рази меншим, ніж період проходження пачок Тn.
4. Спосіб за будь-яким з пп. 1-3, який відрізняється тим, що вводять режим додаткового сканування по періоду повторення від Т1 до Тn в 1,5 рази протягом декількох циклів з одночасною плавною зміною регулярної модулюючої частоти в 1,5 рази.
Текст
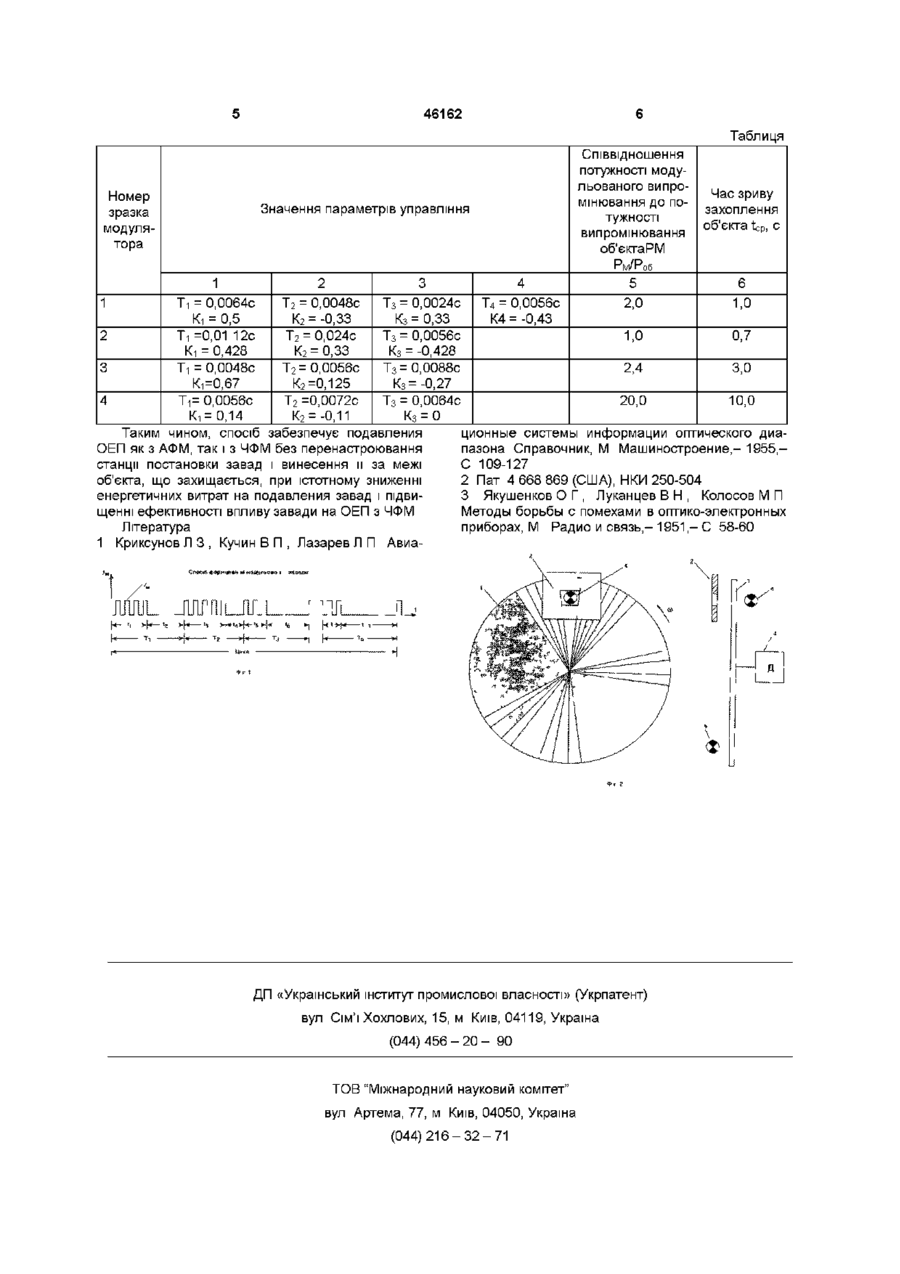
1 Спосіб формування модульованої завади, здійснюваного на частоті, близькій до частоти сигналу оптико-електронного пристрою, що подавляється, який відрізняється тим, що здійснюють модуляцію потужного інфрачервоного випромінювача ПОСЛІДОВНІСТЮ нерегулярних пачок імпульсів, заповнених регулярною модулюючою частотою 2 Спосіб за п 1, який відрізняється тим, що нерегулярність пачок імпульсів задають за допомогою змінних коефіцієнтів керування і періодів по вторення, і таким чином передбачають заздалегідь траєкторію виходу зображення об'єкта з поля зору оптико-електронного пристрою 3 Спосіб за п 1 або 2, який відрізняється тим, що нерегулярність пачок імпульсів виражають за допомогою змінних коефіцієнтів керування Кп = t t,+i /1, + t+i, де t, - тривалість пачки, заповненої регулярною модулюючою частотою і t,+i - тривалість паузи, і періодів повторення Тп, при цьому коефіцієнт керування може змінюватися від Кі до Кп протягом циклу керування, і цикли повторюються протягом всього процесу подавляння, а період регулярної модулюючої частоти значно відрізняється від періоду несучої частоти і його вибирають в 12 24 рази меншим, ніж період проходження пачок Тп 4 Спосіб за будь-яким з пп 1-3, який відрізняється тим, що вводять режим додаткового сканування по періоду повторення від Ті до Тп в 1,5 рази протягом декількох циклів з одночасною плавною зміною регулярної модулюючої частоти в 1,5 рази Винахід відноситься до оптико-електронної техніки і може знайти застосування в станціях захисту об'єктів від керованих засобів ураження з оптико-електронними приладами (ОЕП) В ОЕП засобів ураження інформація про місцеположення об'єкта в просторі відносно оптичної осі приладу кодується за допомогою растрових аналізаторів зображення з амплітудно-фазовою модуляцією (АФМ) або з частотно-фазовою модуляцією (ЧФМ) [1] Інформація про величину розузгодження, що кодується аналізаторами з АФМ, міститься в амплітуді вихідного сигналу, що знімається з приймача випромінювання, розташованого за аналізатором, інформація, що кодується аналізаторами з ЧФМ - в девіації частоти вихідного сигналу, інформація про напрям розузгодження міститься (для двох типів аналізаторів) в фазі вихідного сигналу Для постановки завади ОЕП, що мають аналізатор з АФМ, подають помилковий сигнал на частоті близькій до несучої і перевищуючий по потуж ності сигнал від об'єкта, цей спосіб використовується в станціях постановки завад [3] При постановці завади ОЕП, забезпечених аналізатором з АФМ, завадовий сигнал, сформований вказаним вище способом (на несучій частоті), не впливає істотним чином на оптико-електронний пристрій, що подавляється і є лише додатковим джерелом випромінювання, що демаскує об'єкт Виникає необхідність винесення станції завад за зону об'єкта, що прикривається Спосіб створення завади, заснований на девіації частоти вхідного сигналу, неприйнятний, оскільки завада буде ефективна тільки для ОЕП з ЧФМ Найбільш близьким за технічною суттю до запропонованого є спосіб формування модульованої завади по патенту [2] на несучій що або огинючій частоті сигналу, що подавляється ОЕП, або на частоті f=fH±fr де f H - несуча частота, fr — власна частота пропривода, що подавля О (О (О 46162 При розробці способу уперше виявлена узається ОЕП (fr = 2 10Гц) гальнена для функціонування ОЕП з АФМ і ЧФМ Причини, перешкоджаючі досягненню очікуваімпульсна ПОСЛІДОВНІСТЬ, що дозволяє передбачиного технічного результату ти зазделепдь процес виходу з поля зору зобра1) Необхідність значного в 10 20 раз перевиження об'єкта по зазделепдь заданій траєкторії щення завадового сигналу над корисним на вході Ця імпульсна ПОСЛІДОВНІСТЬ має як регулярну ОЕП, що подавляється складову, так і нерегулярну, і керована в широко2) Ефективна протидія ОЕП з ЧФМ може бути му діапазоні частот На фіг 1 креслень представздійснена при умові винесення станції за межі об'лена циклограма цієї ПОСЛІДОВНОСТІ У кожному єкта, що захищається циклі є декілька нерегулярних пачок імпульсів, 3) Відсутність універсальності завадового заповнених регулярною модулюючою частотою fM впливу для ОЕП з АФМ і ЧФМ Тривалість імпульсного регулярного впливу познаТехнічною задачею винаходу є створення спочена через t, а тривалість паузи через t,+i Нерегусобу формування модульованої завади оптиколярність пачок імпульсів виражається через ЗМІННІ електронним пристроям, що забезпечує подавлекоефіцієнти управління Kn=trt|+i/t+t|+i і періоди пония ОЕП як з АФМ, так і з ЧФМ без перенастроювторення Тп, які також можуть змінюватися Підбовання станції постановки завад і винесення и за ром коефіцієнтів управління вибирають траєкторію межі об'єкта, що захищається, при істотному знивиходу зображення з поля зору ОЕП, наприклад, женні енергетичних витрат на подавления і підвипо спіралі, що розширяється, вібрації в протилежщенні ефективності впливу завади на ОЕП з ЧФМ них напрямах з різною частотою і амплітудою КоЗазначена задача вирішується тим, що в споефіцієнт управління може змінюватися від Кі до Кп собі формування модульованої завади, здійснюпротягом циклу управління, і цикли повторюються ванму на частоті, близькій до частоти сигналу опв протягом всього процесу подавления Період тико-електронного пристрою, що подавляється, регулярної модулюючої частоти значно відрізнязгідно з винаходом, здійснюють модуляцію потужється від періоду несучої частоти і його вибирають ного інфрачервоного (ІЧ) випромінювача ПОСЛІДОв 12 24 разів меншим, ніж Тп період проходження ВНІСТЮ нерегулярних пачок імпульсів, заповнених пачок регулярною модулюючою частотою Нерегулярність пачок імпульсів задають за Деякі ОЕП мають змінну кутову частоту обердопомогою змінних коефіцієнтів управління і перітання пропривода, для цього вводять режим доодів повторення, і таким чином передбачають задаткового сканування по періоду повторення від Ті здалегідь траєкторію виходу зображення об'єкта з до Тп в 1 5 рази протягом декількох циклів з однополя зору оптико-електронного пристрою часною зміною регулярної модулюючої частоти в 1,5 разів Нерегулярність пачок імпульсів виражають за допомогою змінних коефіцієнтів управління K n =t r На фіг 2 показаний можливий варіант приt,+1/t|+t+i, де t, тривалість пачки, заповненої регулястрою для реалізації запропонованого способу рною модулюючою частотою і t+i тривалість паузи, формування модульованої завади, який являє і періодів повторення Тп, при цьому коефіцієнт собою дисковий модулятор 1 з нерухомою діафрауправління може змінюватися від Кі до Кп протягмою 2 гом циклу управління, і цикли повторюються проДисковий модулятор приводиться в рівноміртягом всього процесу подавления, а період регуний обертальний рух з кутовою швидкістю ш за лярної модулюючої частоти значно відрізняється допомогою двигуна постійного струму 3, що викливід періоду несучої частоти і його вибирають в кає модуляцію потоку ІЧ-випромінювання від дже12 24 разів меншим, ніж Тп період проходження рела 4 ВІДПОВІДНО до циклограми, що наведена на пачок фіг 1 Джерело ІЧ-випромінювання 5 не модулюється та імітує випромінювання об'єкта, що приВ разі необхідності вводять режим додатковокривається го сканування по періоду повторення від Ті до Тп в 1,5 разів протягом декількох циклів з одночасною Конкретний вигляд циклограми залежить від плавною зміною регулярної модулюючої частоти в вибраних параметрів управління Тп і Кп У таблиці 1,5 разів представлені результати випробування різних дискових модуляторів, де в початковій колонці вкаСпосіб ілюструється кресленнями, де на фіг 1 заний номер зразка модулятора, 1-4 значення папредставлена циклограма узагальненої для функраметрів управління, 5 співвідношення ціонування ОЕП з АФМ і ЧФМ імпульсної ПОСЛІДОпотужності модульованого випромінювання до ВНОСТІ, І на фіг 2 показаний можливий варіант потужності випромінювання об'єкта, 6 - час зриву пристрою для реалізації запропонованого способу захоплення об'єкта формування модульованої завади Спосіб здійснюють таким чином 46162 Таблиця Номер зразка модулятора Значення параметрів управління Співвідношення потужності модульованого випромінювання до потужності випромінювання об'єктаРМ Час зриву захоплення об'єкта t c p , с Рм/Роб 1 2 3 4 5 6 1 Ті = 0,0064с Т2 = 0,0048с Тз = 0,0024с Т4 = 0,0056с 2,0 1,0 К2 = -0,33 Кз = 0,33 К4 = -0,43 Кі = 0,5 2 Ті =0,01 12с Т2 = 0,024с Тз = 0,0056с 1,0 0,7 Кі = 0,428 К2 = 0,33 Кз = -0,428 3 Ті = 0,0048с Т2 = 0,0056с Т 3 = 0,0088с 2,4 3,0 Кі=0,67 К2=0,125 К 3 =-0,27 4 Ті= 0,0056с Т2 =0,0072с Тз = 0,0064с 20,0 10,0 К3 = 0 Кі = 0,14 К2 = -0,11 Таким чином, спосіб забезпечує подавления ционные системы информации оптического диаОЕП як з АФМ, так і з ЧФМ без перенастроювання пазона Справочник, М Машиностроение,- 1955,станції постановки завад і винесення и за межі С 109-127 об'єкта, що захищається, при істотному зниженні 2 Пат 4 668 869 (США), НКИ 250-504 енергетичних витрат на подавления завад і підви3 Якушенков О Г , Луканцев В Н , Колосов М П щенні ефективності впливу завади на ОЕП з ЧФМ Методы борьбы с помехами в оптико-электронных приборах, М Радио и связь,- 1951,- С 58-60 Література 1 Криксунов Л 3 , Кучин В П , Лазарев Л П Авиа ДП «Український інститут промислової власності» (Укрпатент) вул Сім'ї Хохлових, 15, м Київ, 04119, Україна (044) 456 - 20 - 90 ТОВ "Міжнародний науковий комітет" вул Артема, 77, м Київ, 04050, Україна (044)216-32-71
ДивитисяДодаткова інформація
Автори англійськоюKuchyn Valerii Pavlovych
Автори російськоюКучин Валерий Павлович
МПК / Мітки
МПК: G01S 7/36
Мітки: спосіб, завади, модульованої, формування
Код посилання
<a href="https://ua.patents.su/3-46162-sposib-formuvannya-modulovano-zavadi.html" target="_blank" rel="follow" title="База патентів України">Спосіб формування модульованої завади</a>
Пристрій формування модульованої завади оптико-електронним приладам
Номер патенту: 46161
Опубліковано: 15.05.2002
Автори: Архипов Микола Іванович, Кучин Валерій Павлович
МПК: G01S 7/36
Мітки: модульованої, формування, оптико-електронним, завади, пристрій, приладам
Формула / Реферат:
1. Пристрій формування модульованої завади оптико-електронним приладам, що складається з двох співвісних циліндрів, на твірних поверхнях яких виконані проникні для інфрачервоного випромінювання прорізи, один з циліндрів встановлений з можливістю обертання навколо випромінювача імпульсів інфрачервоного випромінювання, розташованого всередині циліндрів вздовж центральної осі, який відрізняється тим, що встановлений з можливістю обертання...
Спосіб виділення вихідної перемикальної функції несучої частоти з частотно-модульованої напруги
Номер патенту: 22063
Опубліковано: 15.05.2002
Автори: Клюк Богдан Олексійович, Троян Олександр Ігоревич, ГАЛИНОВСЬКИЙ ОЛЕКСАНДР МИХАЙЛОВИЧ, Ленська Олена Олександрівна, Підлісний Анатолій Михайлович
МПК: H04L 27/00
Мітки: несучої, частотно-модульованої, напруги, виділення, перемикальної, вихідної, частоти, спосіб, функції
Формула / Реферат:
Способ выделения исходной переключающей функции несущей частоты из частотно-модулированного напряжения, заключающийся в выделении временных интервалов, в которых мгновенное значение модулированного напряжения выше /ниже величины другого сопоставляемого напряжения, отличающийся тем, что исходную систему напряжений делят на m групп из n напряжений с одинаковой фазой несущей частоты, промодулированных соответственно напряжениями n фаз...
Спосіб виділення вихідної перемикаючої функції несучої частоти з частотно-модульованої напруги
Номер патенту: 22063
Опубліковано: 30.04.1998
Автори: Ленська Олена Олександрівна, Троян Олександр Ігоревич, ГАЛИНОВСЬКИЙ ОЛЕКСАНДР МИХАЙЛОВИЧ, Клюк Богдан Олексійович, Підлісний Анатолій Михайлович
МПК: H04L 27/00
Мітки: вихідної, напруги, функції, спосіб, частоти, частотно-модульованої, несучої, виділення, перемикаючої
Формула / Реферат:
Способ выделения исходной переключающей функции несущей частоты из частотно-модулированного напряжения, заключающийся в выделении временных интервалов, в которых мгновенное значение модулированного напряжения выше /ниже величины другого сопоставляемого напряжения, отличающийся тем, что исходную систему напряжений делят на m групп из n напряжений с одинаковой фазой несущей частоты, промодулированных соответственно напряжениями n фаз...
Спосіб формування когерентного відповідного сигналу в когерентно-імпульсній рлс з активною відповіддю
Номер патенту: 46627
Опубліковано: 15.05.2002
Автори: Баранов Андрій Володимирович, Каплієнко Володимир Сергійович
МПК: G01S 13/74
Мітки: рлс, відповіддю, спосіб, когерентного, формування, відповідного, активною, когерентно-імпульсній, сигналу
Формула / Реферат:
Спосіб формування когерентного відповідного сигналу у когерентно-імпульсній радіолокаційній станції з активною відповіддю, який полягає в тому, що прийнятий радіолокаційною станцією сигнал перетворюють на проміжну частоту, фільтрують, формують відповідний сигнал на проміжній частоті, підсилюють його і перетворюють на частоту прийнятого сигналу і випромінюють, який відрізняється тим, що переносять частоту сигналу радіолокаційної станції на...
Станція постановки модульованих завад оптико-електронним приладам
Номер патенту: 44930
Опубліковано: 15.03.2002
Автори: Архипов Микола Іванович, Кучин Валерій Павлович, Логвиненко Микола Миколайович
МПК: G01S 7/36
Мітки: оптико-електронним, модульованих, станція, постановки, приладам, завад
Формула / Реферат:
Станція постановки модульованих завад оптико-електронним приладам, що містить імпульсне джерело коливань, модулятор цих коливань і блок керування, яка відрізняється тим, що вона додатково містить процесор, перший вхід якого сполучений з блоком керування, а вихід сполучений з входом цифро-аналогового перетворювача, вихід зазначеного цифро-аналогового перетворювача підключений до входу модулятора, вихід якого сполучений з входом імпульсного...
Попередній патент: Спосіб вилучення фосфоровмісних відходів та осаджена суміш солей, що містить кальцій та фосфор
Випадковий патент: Пристрій для миття коренебульбоплодів