Спосіб визначення координат центру жорсткості пружно підвішеної платформи
Номер патенту: 46330
Опубліковано: 15.05.2002
Автори: Богдан Кім Степанович, Корнієць Ірина Василівна, Тарасевич Микола Іванович, Санкін Анатолій Олексійович
Формула / Реферат
Спосіб визначення координат центру жорсткості пружно підвішеної платформи, який включає послідовне прикладання еталонного вантажу по кутах та в центрі платформи, вимірювання сумарної деформації пружного підвісу відносно нерухомої основи, який відрізняється тим, що проводять принаймні п'ять циклів навантаження платформи еталонним вантажем по кутах та в центрі, визначають середні значення лінійного переміщення центру симетрії платформи для кожного з місць прикладання навантаження ![]() , обчислюють координати хс, ус центру жорсткості по формулах:
, обчислюють координати хс, ус центру жорсткості по формулах:
де х, у - відстань між осями пружних елементів відповідно по повздовжній і поперечній осях платформи.
Текст
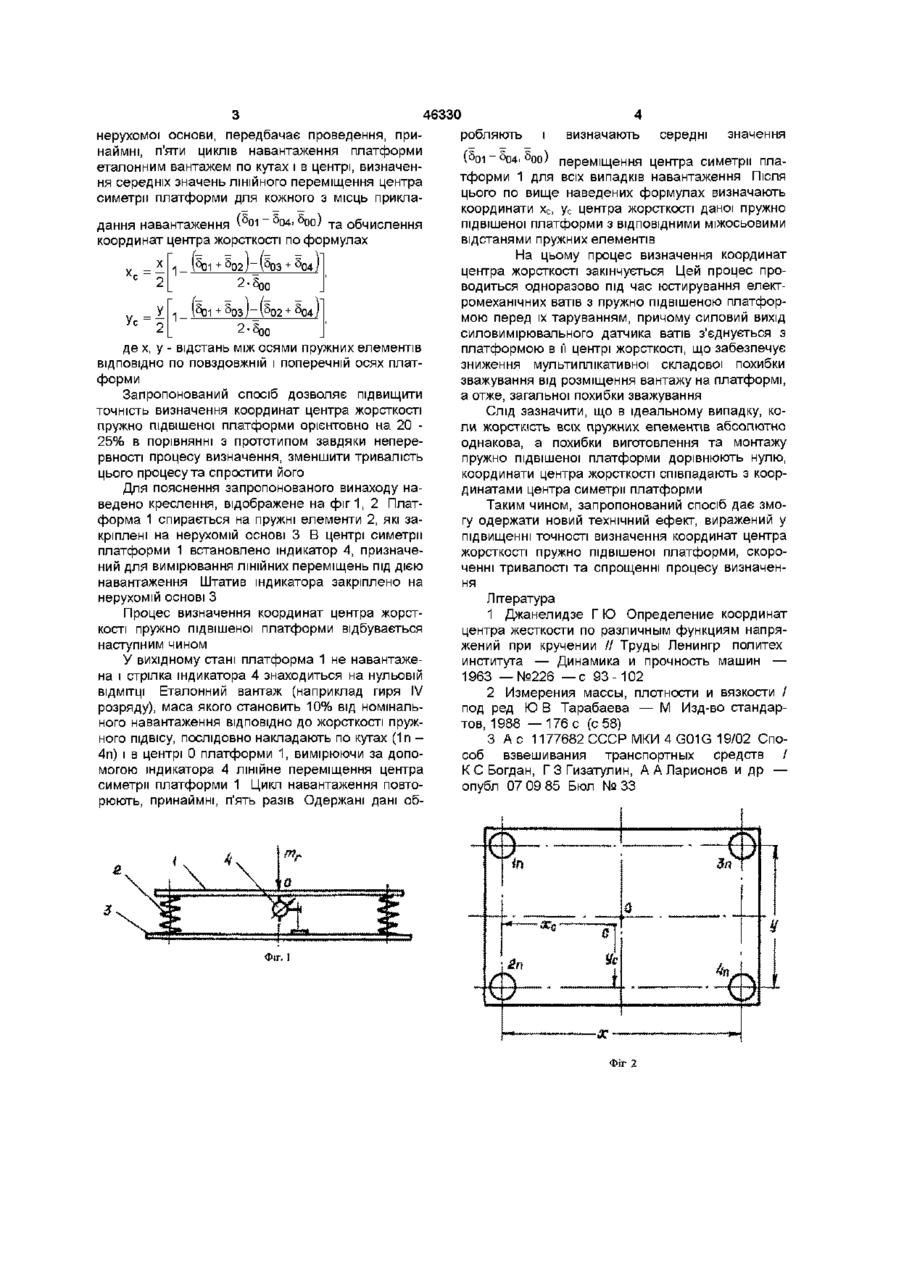
Спосіб визначення координат центру жорсткості пружно підвішеної платформи, який включає послідовне прикладання еталонного вантажу по кутах та в центрі платформи, вимірювання сумарної деформації пружного підвісу відносно нерухомої основи, який відрізняється тим, що проводять принаймні п'ять циклів навантаження платформи еталонним вантажем по кутах та в центрі, визна чають середні значення ЛІНІЙНОГО переміщення центру симетрії платформи для кожного з місць Винахід відноситься до ваговимірювальної техніки і може бути використаний при юстируванні електромеханічних вапв з пружно підвішеною платформою Відомо спосіб визначення координат центра жорсткості пружної балки шляхом вимірювання механічних напружень при крученні [1] Недоліком цього способу є його складність, обумовлена тим, що для одержання результату треба визначити різні функції напружень балки, які залежать від випадкових факторів Крім того, цей спосіб важко інтерполювати для визначення координат центра жорсткості пружно підвішеної платформи Відомо спосіб визначення залежності результатів зважування на платформних вагах від місця розташування вантажу на платформі (метод кутових випробувань) [2] Цей спосіб дозволяє визначити лише похибку зважування, обумовлену відхиленням центра жорсткості пружно підвішеної платформи від її центра симетрії Самі ж відхилення за допомогою цього способу визначити неможливо Найбільш близьким (прототипом) до запропонованого винаходу щодо технічної суті та досягну того результату є спосіб визначення координат центра жорсткості пружно підвішеної платформи, реалізований у ваговому пристрої [3] Цей спосіб полягає в тому, що еталонний вантаж накладають на платформу по кутах і в центрі, вимірюють сумарну деформацію пружного підвісу в різних місцях поблизу центра симетрії платформи і знаходять те місце, в якому похибка зважування від розташування вантажу на платформі є мінімальною Це і буде в першому наближенні центр жорсткості пружно підвішеної платформи Слід додати, що дискретність процесу вимірювань не дозволяє одержати високу точність визначення центра жорсткості В основу запропонованого винаходу поставлена задача підвищення точності визначення координат центра жорсткості пружно підвішеної платформи при одночасному спрощенні процесу Поставлена задача вирішена тим, що запропонований спосіб визначення координат центра жорсткості пружно підвішеної платформи, який включає послідовне накладання еталонного вантажу по кутах та в центрі платформи і вимірювання сумарної деформації пружного підвісу відносно прикладання навантаження (5 0 1 -5Q4,SOO) > °б числюють координати хс, ус центру жорсткості по формулах Ус = де х, у - відстань між осями пружних елементів ВІДПОВІДНО по повздовжній і поперечній осях платформи О со го (О 46330 нерухомої основи, передбачає проведення, принаймні, п'яти циклів навантаження платформи еталонним вантажем по кутах і в центрі, визначення середніх значень ЛІНІЙНОГО переміщення центра симетрії платформи для кожного з місць прикладання навантаження (°О1 ~°04> °оо) та обчислення координат центра жорсткості по формулах Ус = де х, у - відстань між осями пружних елементів ВІДПОВІДНО по повздовжній і поперечній осях платформи Запропонований спосіб дозволяє підвищити точність визначення координат центра жорсткості пружно підвішеної платформи орієнтовно на 20 25% в порівнянні з прототипом завдяки неперервності процесу визначення, зменшити тривалість цього процесу та спростити його Для пояснення запропонованого винаходу наведено креслення, відображене на фіг1, 2 Платформа 1 спирається на пружні елементи 2, які закріплені на нерухомій основі З В центрі симетрії платформи 1 встановлено індикатор 4, призначений для вимірювання ЛІНІЙНИХ переміщень під дією навантаження Штатив індикатора закріплено на нерухомій основі З Процес визначення координат центра жорсткості пружно підвішеної платформи відбувається наступним чином У вихідному стані платформа 1 не навантажена і стрілка індикатора 4 знаходиться на нульовій ВІДМІТЦІ Еталонний вантаж (наприклад гиря IV розряду), маса якого становить 10% від номінального навантаження ВІДПОВІДНО ДО жорсткості пружного підвісу, послідовно накладають по кутах (1п 4п) і в центрі 0 платформи 1, вимірюючи за допомогою індикатора 4 лінійне переміщення центра симетрії платформи 1 Цикл навантаження повторюють, принаймні, п'ять разів Одержані дані об робляють і визначають середні значення ( 5 0 1 - 5 0 4 , 5 0 0 ) П Є р Є М | щ Є Н Н Я центрасиметрії платформи 1 для всіх випадків навантаження Після цього по вище наведених формулах визначають координати хс, ус центра жорсткості даної пружно підвішеної платформи з ВІДПОВІДНИМИ МІЖОСЬОВИМИ відстанями пружних елементів На цьому процес визначення координат центра жорсткості закінчується Цей процес проводиться одноразово під час юстирування електромеханічних ватів з пружно підвішеною платформою перед їх таруванням, причому силовий вихід силовимірювального датчика ватів з'єднується з платформою в її центрі жорсткості, що забезпечує зниження мультиплікативної складової похибки зважування від розміщення вантажу на платформі, а отже, загальної похибки зважування Слід зазначити, що в ідеальному випадку, коли жорсткість всіх пружних елементів абсолютно однакова, а похибки виготовлення та монтажу пружно підвішеної платформи дорівнюють нулю, координати центра жорсткості співпадають з координатами центра симетрії платформи Таким чином, запропонований спосіб дає змогу одержати новий технічний ефект, виражений у підвищенні точності визначення координат центра жорсткості пружно підвішеної платформи, скороченні тривалості та спрощенні процесу визначення Література 1 Джанелидзе Г Ю Определение координат центра жесткости по различным функциям напряжений при кручении // Труды Ленингр политех института — Динамика и прочность машин — 1963 —№226 — с 93-102 2 Измерения массы, плотности и вязкости / под ред Ю В Тарабаева — М Изд-во стандартов, 1988 — 1 7 6 с (с 58) 3 А с 1177682 СССР МКИ 4 G01G 19/02 Способ взвешивания транспортных средств / К С Богдан, ГЗГизатулин, А А Ларионов и др — опубл 07 09 85 Бюл № 33 Фіг. І Фіг 2 46330 ДП «Український інститут промислової власності» (Укрпатент) вул Сім'ї Хохлових, 15, м Київ, 04119, Україна (044)456-20- 90 ТОВ "Міжнародний науковий комітет" вул Артема, 77, м Київ, 04050, Україна (044)216-32-71
ДивитисяДодаткова інформація
Автори англійськоюBohdan Kim Stepanovych, Tarasevych Mykola Ivanovych, Sankin Anatolii Oleksiiovych
Автори російськоюБогдан Ким Степанович, Тарасевич Николай Иванович, Санкин Анатолий Алексеевич
МПК / Мітки
МПК: G01G 23/00, G01M 5/00
Мітки: визначення, платформи, координат, підвішеної, центру, спосіб, пружної, жорсткості
Код посилання
<a href="https://ua.patents.su/3-46330-sposib-viznachennya-koordinat-centru-zhorstkosti-pruzhno-pidvisheno-platformi.html" target="_blank" rel="follow" title="База патентів України">Спосіб визначення координат центру жорсткості пружно підвішеної платформи</a>
Спосіб визначення координат дефектів методом акустичної емісії
Номер патенту: 43125
Опубліковано: 15.11.2001
Автори: Горошко Андрій Володимирович, Ковтун Ігор Іванович, Ройзман Вілен Петрович, Прохоренко Сергій Вікторович
МПК: G01N 29/14
Мітки: дефектів, визначення, координат, спосіб, емісії, методом, акустичної
Формула / Реферат:
Спосіб визначення координат дефектів методом акустичної емісії (АЕ), що полягає у реєстрації хвиль акустичного діапазону, генерованих досліджуваним об'єктом під впливом зовнішньої енергетичної дії, за допомогою групи скорельованих акустичних давачів та визначенні різниці часу приходу переднього фронту хвилі, утвореного у місці розташування дефектоутворюючої неоднорідності у матеріалі об'єкта, обчисленні координат джерела реєстрованого...
Спосіб визначення координат наземного джерела радіовипромінювання
Номер патенту: 43565
Опубліковано: 17.12.2001
Автори: Деденок Віктор Петрович, Худов Генадій Володимирович, Березіна Світлана Іванівна, Бутенко Ольга Станіславівна, Голкін Дмитро Васильович
МПК: G01S 5/06
Мітки: джерела, радіовипромінювання, визначення, наземного, координат, спосіб
Формула / Реферат:
Спосіб, визначення координат наземного джерела радіовипромінювання, який полягає в тому, що приймачі випромінювання встановлюють в двох пунктах прийому з відомими координатами, вимірюють різницю дальностей від джерела випромінювання до приймачів і запам'ятовують час виміру, виміряне значення різниці дальностей використовують для індикації першого різницево-дальномірного пеленга, який відрізняється тим, що радіоприймачі випромінювання...
Спосіб визначення координат та орієнтації осі свердловини

Номер патенту: 31185
Опубліковано: 15.12.2000
Автори: Карпачов Юрій Андрійович, Анупрієнко Генадій Єфремович, Рудик Юрій Микитович
МПК: E21B 47/02, G01C 9/00
Мітки: орієнтації, визначення, спосіб, осі, свердловини, координат
Текст:
...: i i i (2 ) (2 ) j ic = - cosb ( 2 ) sina ( 2) i i i i (2 ) cos b ( 2 ) cos a ( 2 ) j i i i + (2 ) sinb ( 2 ) k i . i (4) + + Із виразу (4) отримуєм вираз для вектора (поворот нанавколо осі O iO i+ 1 : ( 2) ( 2) æ O iOi + 1 = R jic = ç - cos b ( 2 ) sin a ( 2 ) ii + i i è вісью O iz( 2 ) жорстко зв'язаною з возиком 2. i При цьому створюється система координат O ix( 2) y( 2 ) z( 2) (див. фіг. 2), де вісь Oi y( 2 ) направлеik ic ic ic ...
Спосіб визначення жорсткості підшипникових опор
Номер патенту: 34525
Опубліковано: 15.03.2001
Автори: Клявлін Валерій Володимирович, Немчин Олександр Федорович
МПК: G01M 13/00
Мітки: опор, визначення, жорсткості, спосіб, підшипникових
Текст:
...запропонованого способу є те, що пари точок на корпусі досліджуваного підшипника розміщені рівномірно відносно його вісі симетрії. При цьому для "незношеного", тобто відносно "нового" підшипника, достатньо вибирати що найменше дві пари таких то чок. Чим більше термін експлуа тації підшипника, тим менше його ресурс і жорсткість опори, і тим більше пар точок вимірів на його корпусі треба обирати. Для підвищення достовірності результатів ви...
Пристрій для визначення координат точки зображення з максимальною яскравістю
Номер патенту: 22957
Опубліковано: 05.05.1998
Автори: Василецький Сергій Анатолійович, Колесницький Олег Костянтинович, Кожем'яко Володимир Прокопович
МПК: G06K 9/46
Мітки: зображення, точки, пристрій, яскравістю, визначення, координат, максимальною
Формула / Реферат:
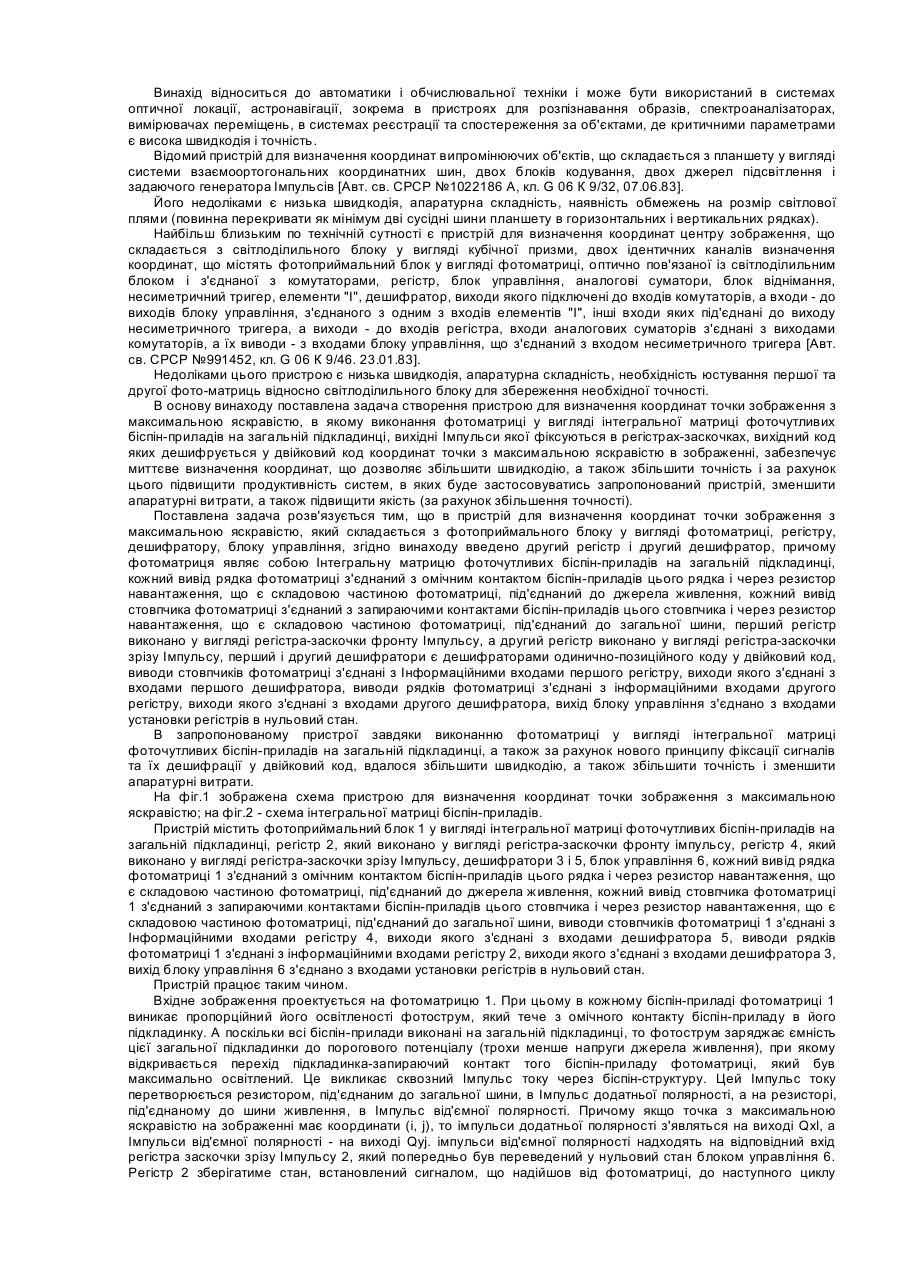
Пристрій для визначення координат точки зображення з максимальною яскравістю, що містить фотоприймальний блок, у вигляді фотоматриці, регістр, дешифратор, блок управління, який відрізняється тим, що в нього введено другий регістр і другий дешифратор, причому фотоматриця являє собою Інтегральну матрицю фоточутливих біспін-приладів на загальній підкладинці, кожний вивід рядка фотоматриці з'єднаний з омічним контактом біспін-приладів цього рядка...
Попередній патент: Спосіб інтенсифікації видобутку нафти
Наступний патент: Спосіб визначення концентрацій речовин в середовищах і пристрій для його здійснення
Випадковий патент: Спосіб оцінки ступеня демієлінізації аксонів при експериментальному алергічному енцефаломієліті