Спосіб визначення координат та орієнтації осі свердловини
Номер патенту: 31185
Опубліковано: 15.12.2000
Автори: Карпачов Юрій Андрійович, Анупрієнко Генадій Єфремович, Рудик Юрій Микитович



Текст
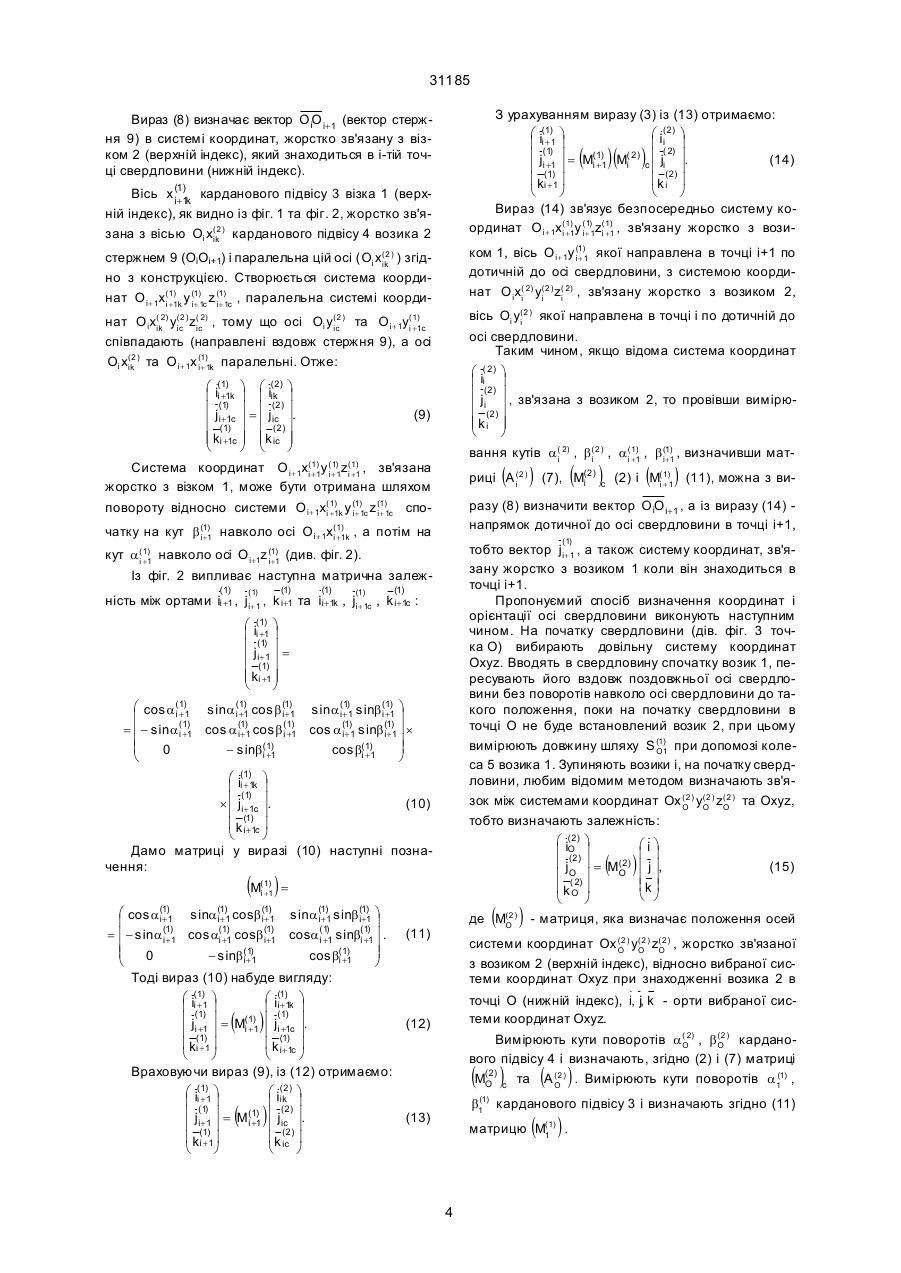
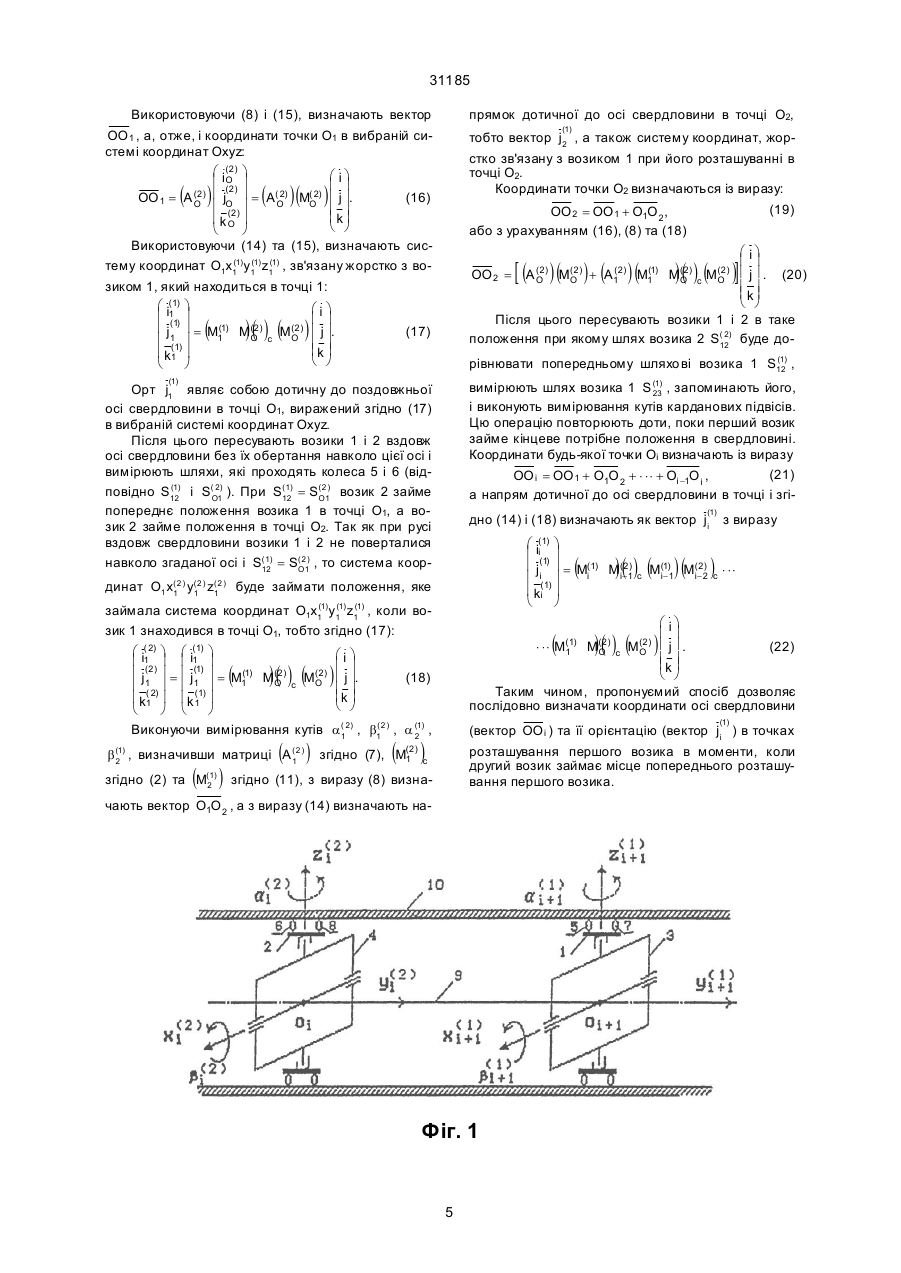
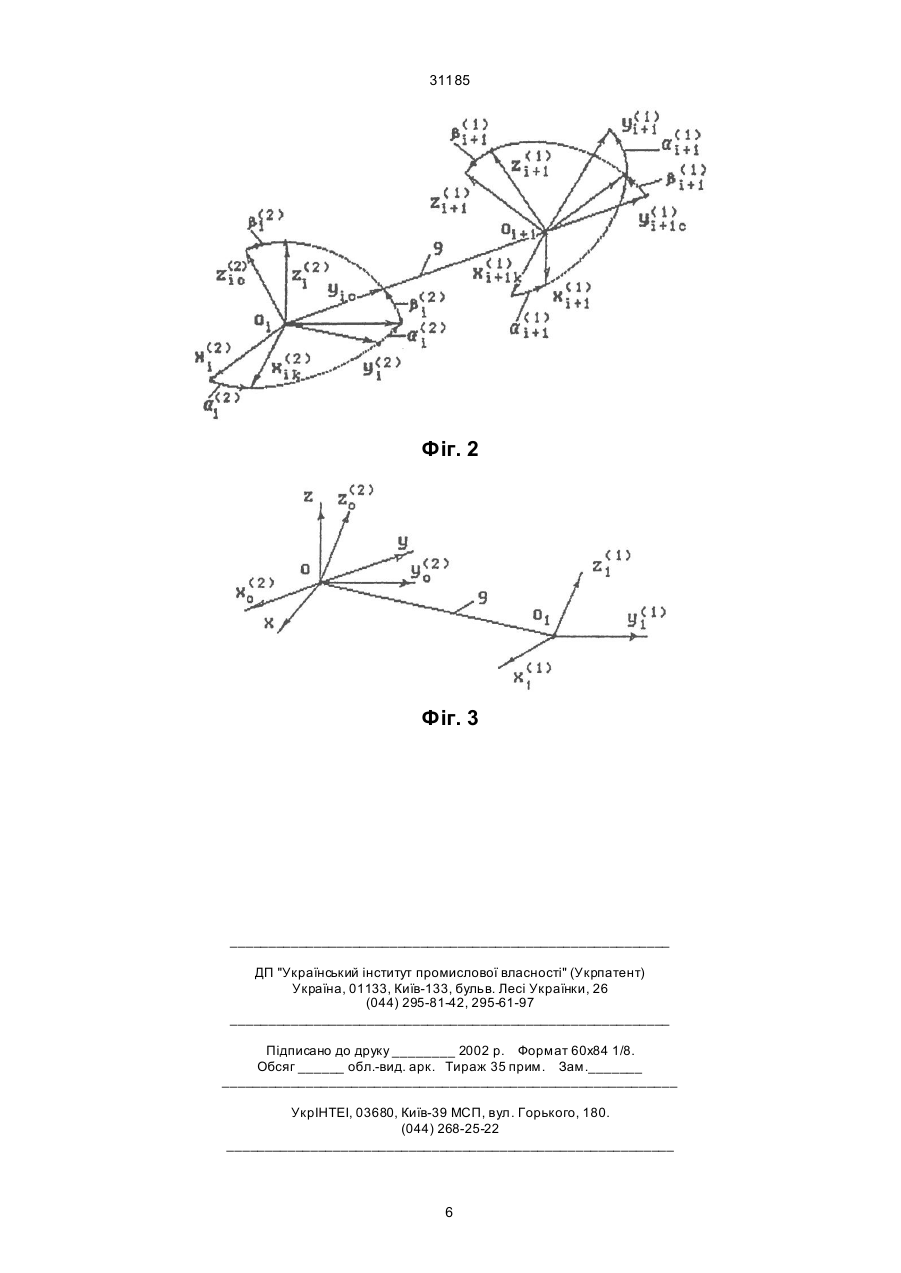
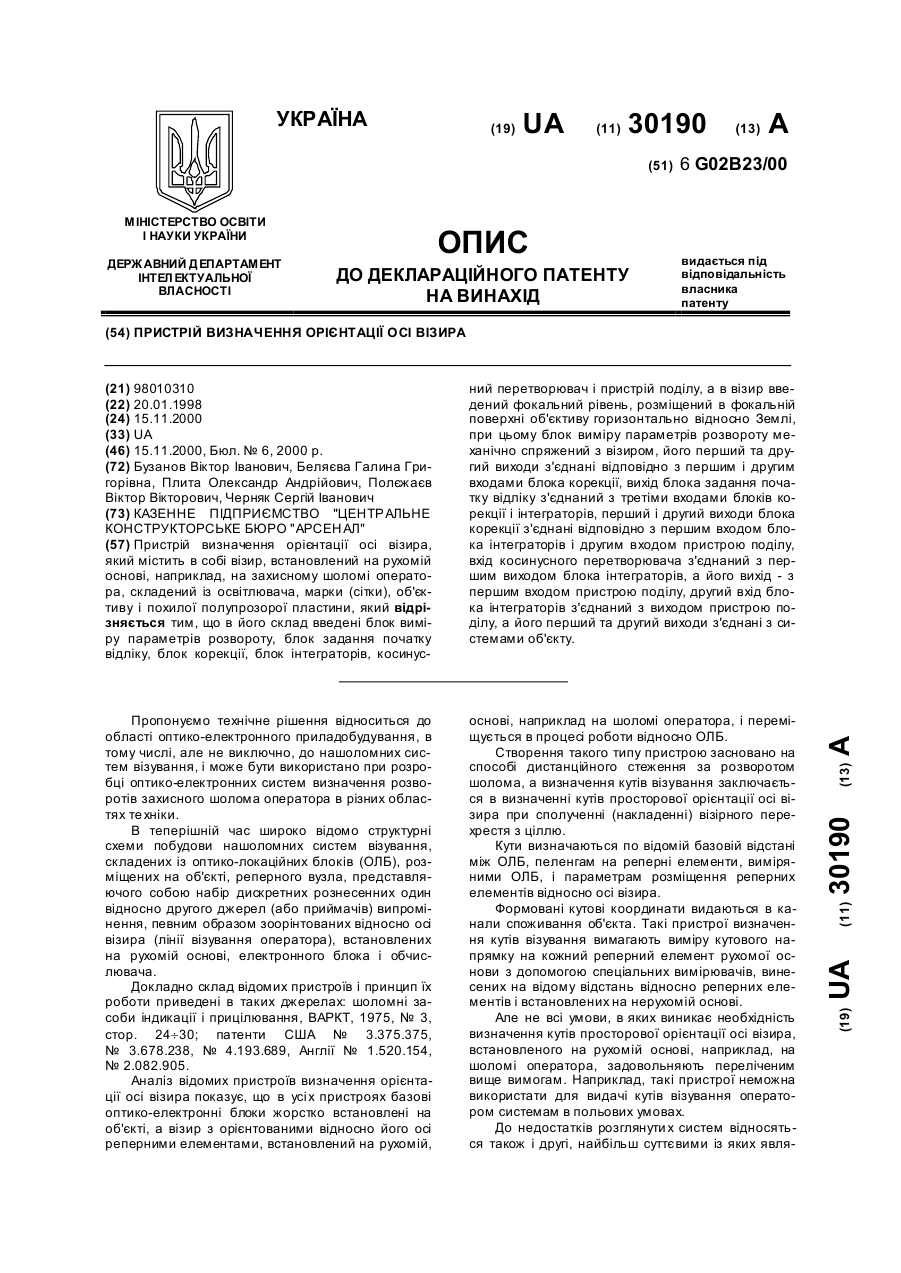
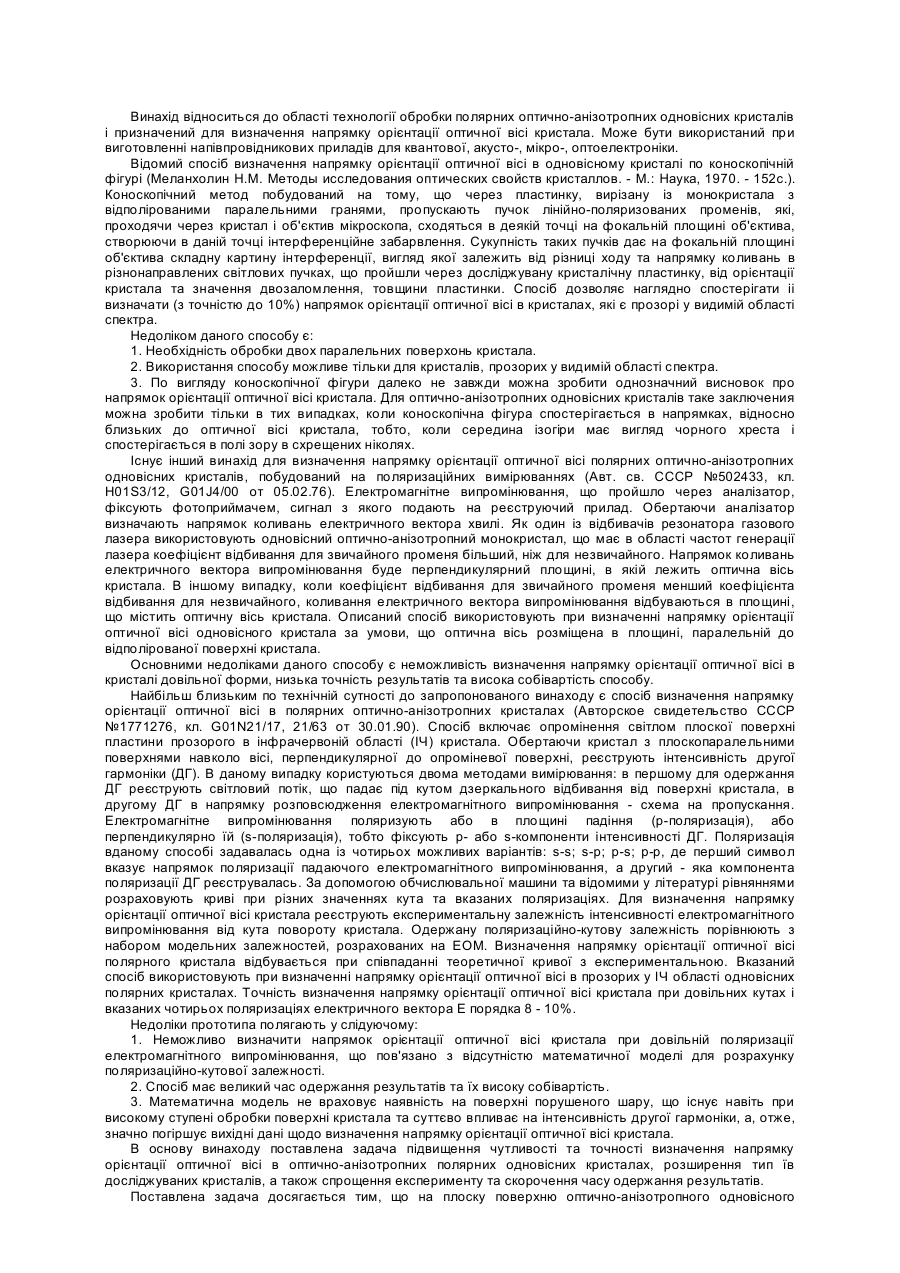
Спосіб визначення координат та орієнтації осі свердловини, який містить у собі операції вимірювання, при допомозі карданового підвісу з внутрішньою та зо внішньою рамками, куті в по вороту стержня, закріпленного, на внутрішній рамці, відносно зовнішньої та внутрішньої осей, який відрізняється тим, що вибирають систему координат на початку осі свердловини, визначають орієнтацію осі свердловини на її початку в вибранній системі координат, встановлюють на початку свердловини перший візок, зв'язаний з другим аналогічним візком через стержень відомої довжини і карданові підвіси з внутрішніми і зовнішніми рамками, пересувають перший візок вздовж поздовжньої осі свердловини і вимірюють при цьому її шля х доки другий аналогічний візок займе місце на початку свердловини, де в свій час знаходився перший візок на початку шляху, вимірюють кути повороту стержня відносно зовнішніх та внутрішніх осей обох карданових підвісів, потім знов пересувають перший візок вздовж осі свердловини та вимірюють шляхи, які проходять перший і другий візок, коли другий візок проходить шлях, який дорівнює попередньому шляхові першого візка, візки зупиняють і вимірюють вищезгадані кути повороту стержня і так повторюють, доки перший візок займе кінцеве потрібне положення в свердловині, потім, координати осі свердловини та її орієнтацію в місцях вимірювань кутів, визначають по виміряних кутах, відомій довжині стержня та орієнтації осі свердловини на її початку, причому поздовжні осі возиків встановлюють паралельно осі свердловини при їх пересуванні вздовж поздовжньої осі свердловини, при цьому використовують наступні вирази: 31185 (M ) ( 1) i æ cos a (1) i ç = ç - sina (1) i ç ç 0 è sina (1) cos b(1) i i cos a (1) sinb(1) i i - sinb (1) i sina (1) sinb (1) ö i i ÷ cos a (1) sinb (1) ÷ ; i i ÷ ÷ cos b (1) i ø æ cos a (2 ) sina (2 ) 0 ö i i ç ÷ (2 ) (2 ) (2 ) (2 ) = ç - cos b i sina i cos b i cos a i sinb (2 ) ÷ ; i ç ÷ ç sinb (2 ) sina ( 2) - sinb (2 ) cos b (2 ) cos b (2 ) ÷ i i i i i ø è M( 2 ) - матриця, визначаюча положення осей O системи координат, жорстко зв'язанної з другим возиком, відносно вибраної системи координат, коли другий візок знаходиться на початку осі свердловини. ( ) a (1) - кут повороту навколо зовнішньої осі карi данового підвісу першого возика коли він знаходиться в точці і; b (1) - кут повороту навколо внутрішньої осі карi данового підвісу першого возика, коли він знаходиться в точці і; (M ) ( 2) i c = Винахід відноситься до технічної фізики і може бути використаний при визначенні координат та орієнтації осі свердловини, пробуренної в феромагнітному середовищі або обсадженної феромагнітними трубами. Відомі способи визначення орієнтації осі свердловини (наприклад, Морозов Ю.Т. Ме тодика и техника направленного бурения на твердые полезные ископаемые. Л. Недра, 1987, с. 183-187), побудовані на використанні гіроскопічних інклінометрів. По принципу дії ці інклінометри є зберігачами попередньо заданого азимутального напрямку. Перед спуском інклінометра в свердловину здійснюється відповідна його орієнтація, запуск гіроскопа, визначення та компенсація його дрейфу. Весь цей процес достатньо трудомістський. При роботі інклінометра в свердловині, внаслідок неточності компенсації дрейфу та його непостійності, з часом буде наростати похибка в визначенні азимутального напрямку. В таких інклінометрах неврахований дрейф гіроскопів складає величину 4-5 градусів за годину, том у допустимий час їх роботи в свердловині з моменту калібровий на поверхні не перевищує години. Часто цього часу виявляється недостатньо, особливо для глибоких свердловин. Неможливо також створити на такому принципі інклінометричні засоби для довготривалого їх перебування в свердловині. Кутове положення інклінометра відносно вертикального напрямку визначається пристроями, в яких використовується принцип фізичного маятника. Конструктивно гіроскопічний зберігач азимутального напрямку та фізичний маятник достатньо складні та громіздкі і ці складності суттєво зростають при збільшенні допустимих зенітних кутів свердловини. Ці обставини при малих діаметрах свердловин обмежують застосування інклінометрів, котрі розглядаються, зенітними кутами 30° і, в окремих випадках, кутами в 60°. За прототип прийнятий спосіб визначення координат, який використаний в багатокоординатному вимірювачі, описаний в описі винаходу до патенту України № 3945, G01C23/00, G01C21/00, заявка № 4896424/22 від 25.12.90 p., опублікована 27.12.94 p., Бюл. № 6-1, автори Анупрієнко Г.Є., Савенко Ю.М., Рудик Ю.М., Карпачов Ю.А., Клименко О.М., Ча ус Л.М., який полягає в тому, що за допомогою карданового підвісу з внутрішньою та зовнішньою рамками вимірюють кути повороту спиці (стержня), закріпленної на внутрішній рамці, відносно зовнішньої та вн утрішньої осі, а потім розраховують координати рухомої точки з урахуванням довжини спиці і виміряннях кутів. Недоліком прототипу є неможливість вимірювання координат точок, більших ніж довжина спиці (стержня), а також орієнтації осі свердловини в просторі. В основу винаходу покладено задачу вдосконалення способу визначення координат, в якому за рахунок визначення орієнтації осі свердловини на її початку, переміщення стержня відомої довжини вздовж осі свердловини без його поворотів навколо згаданної осі при допомозі двох одинакових возиків, осі яких паралельні осі свердловини в місцях де знаходяться возики, і вимірювання кутів повороту стержня відносно зовнішньої та внутрішньої осі двох карданових підвісів, закріпленних відповідно на першому та другому возиках, забезпечується поступальне визначення координат осі свердловини та її орієнтація в точках розташування першого возика в моменти, коли другий возик займає місце попереднього положення першого возика при попередньому вимірюванні згаданних кутів. Поставлена задача вирішується тим, що в способі визначення координат, який містить в собі операції вимірювання при допомозі карданового підвісу з внутрішньою та зовнішньою рамками кутів повороту стержня, закріпленного на внутрішній рамці, відносно зовнішньої та внутрішньої осей, згідно з винаходом, вибирають систему координат на початку осі свердловини, визначають орієнтацію осі свердловини на її початку будь яким відомим способом, встановлюють на початку свердловини перший возик, зв'язанний через стержень відомої довжини та карданові підвіси з внутрішніми і зовнішніми рамками з другим таким же возиком, пересувають перший возик вздовж осі свердловини і вимірюють при цьому її шлях до того, поки другий аналогічний возик займе місце на початку свердловини, де в свій час находився перший візок на початку шляху, вимірюють кути повороту стержня відносно зовнішніх та внутрішніх осей обох карданових підвісів, потім знов пересувають перший возик вздовж осі свердловини і вимірюють шляхи, які проходять перший та другий возики, коли другий возик проходить шлях, рівний попередньому шляхові, пройденому першим возиком, возики зупиняють і вимірюють вищезгаданні кути повороту стержня і так повторюють, поки перший возик займе кінцеве потрібне положення в свердловині, потім координати осі свердловини та її орієн 2 31185 тацію в місцях вимірювання кутів визначають по замірянних кутах, відомій довжині стержня, початкових координатах та орієнтації осі свердловини на її початку, причому поздовжні осі возиків встановлюють паралельно осі свердловини при їх пересуванні вздовж поздовжньої осі свердловини. Суть пропозиції пояснюється кресленням, де на фіг. 1 зображена кінематична схема приладу, реалізуючого пропонуємий спосіб, на фіг. 2 – системи координат та кути, які вимірюються в і-тій точці знаходження другого возика, на фіг. 3 – система координат на початку свердловини. На фіг. 1 прийняті наступні позначення: 1 - 2 - возики; 3 - 4 - карданові підвіси на возиках 1 та 2 відповідно; 5 - 6 - опорні колеса, які використовуються для вимірювання шляху, пройденного першим і другим возиком відповідно; 7 - 8 - опорні колеса; 9 - стержень довжиною R (Оі Оі+1 - R); 10 - свердловина; 1 Ox ( 2 ) y( 2 ) z( 2 ) і O i+ 1x( 1) y (+)1z( 1) - системи коордиi i i i +1 i i +1 нат, зв'язані відповідно з возиками 2 і 1 (верхній індекс), коли вони знаходяться в точці і та і+1 (нижній індекс) свердловини. Осі y( 2 ) і y( 1) спряi i +1 мовані по дотичній до осі свердловини, коли возики 2 та 1 знаходяться в точках і та і+1 відповідно. Якщо свердловина має кривизну, то коли в ній знаходяться два возики 1 і 2, які містять в собі карданові підвіси 3 та 4, з'єднані стержнем 9, жорстко зв'язаним з внутрішніми осями карданових підвісів, як показано на фіг. 1, стержень 9, з'єднуючий точки Оі та Оі+1, може розвернутися відносно системи координат O ix( 2) y( 2 ) z( 2) , зв'язанної з возиком 2 i i i (верхній індекс), спочатку на кут вколо осі O i x( 2 ) ik O i z( 2 ) i ), а потім на кут a ( 2) i b (2 ) i Із фіг. 2 витікає наступна матрична залежність (2 ) між системами O ix( 2) y( 2 ) z( 2) ik ic ic (2 ) (2 ) a ( 2) i та b (2 ) i координат при розвер(залежність O ix( 2) y( 2 ) z( 2) i i i та ): ( 2) æ cosa(2 ) sina(2 ) 0 öæ ii ö i i ç ÷ç (2 ) ÷ = ç - cosb(2) sina (2) cosb (2 ) cosa(2 ) sinb(2) ÷ç ji ÷. (1) i i i i i ÷ ç ÷ç ç sinb(2) sina (2) - sinb(2) cosb(2 ) cosb(2 ) ÷ç k(2) ÷ i i i i i ø i è è ø Дамо матриці в виразі (1) наступні позначення: M( 2) c = i ( ) æ cos a (2 ) sina (2 ) i i ç (2 ) (2 ) = ç - cos b i sina i cos b (2 ) cos a (2 ) i i ç ç sinb (2 ) sina (2 ) - sinb (2 ) cos a (2 ) i i i i è де індекс "с" означає стержень 9. Тоді вираз (1) прийме вигляд: æ i( 2) ö æ i( 2) ö ç ik ÷ ç i ÷ (2 ) ÷ (2 ) çj = M(2 ) c ç ji ÷. i ç ic2) ÷ ç ( 2) ÷ ç k( ÷ ç ki ÷ ç ic ÷ ç ÷ è ø è ø 0 ö ÷ sinb (2 ) ÷, (2) i ÷ cos b (2 ) ÷ i ø ( ) (3) (2 ) Із виразу (1) визначемо орт j ic , тобто напрям стержня O iO i+ 1 в системі координат O ix( 2) y( 2 ) z( 2) : i i i (2 ) (2 ) j ic = - cosb ( 2 ) sina ( 2) i i i i (2 ) cos b ( 2 ) cos a ( 2 ) j i i i + (2 ) sinb ( 2 ) k i . i (4) + + Із виразу (4) отримуєм вираз для вектора (поворот нанавколо осі O iO i+ 1 : ( 2) ( 2) æ O iOi + 1 = R jic = ç - cos b ( 2 ) sin a ( 2 ) ii + i i è вісью O iz( 2 ) жорстко зв'язаною з возиком 2. i При цьому створюється система координат O ix( 2) y( 2 ) z( 2) (див. фіг. 2), де вісь Oi y( 2 ) направлеik ic ic ic (2 ) + cos b ( 2 ) cos a ( 2 ) j i i i (2 ) ö + sinb ( 2 ) k i ÷R i ø (5) або O iOi +1 = O i x( 2 ) ik на вздовж стержня 9 (індекс внизу "с"), вісь направлена по внутрішній осі карданового підвісу возика 2 (верхній індекс 2 і нижній індекс "k"). По ( = R - cosb(2) sin (2 ), cosb(2) cosa(2 ), sin (2) ai bi i i i значимо i, j i k - одиничні орти систем координат, які розглядаються, верхні та нижні індекси при ) æ i(2) ö çi ÷ ç j(2) ÷ , ç i(2 ) ÷ ç ki ÷ è ø (6) де R довжина стержня 9. Приймемо наступне позначення: (2 ) Ai = R - cosb ( 2) sina ( 2) , cosb ( 2) cosa( 2 ) , sinb( 2 ) . (7) i i i i i Тоді вираз (6) можна уявити в наступному вигляді æ i(2 ) ö ç i ÷ (2 ) O iO i+ 1 = A ( 2 ) ç j i ÷ . (8) i ç (2 ) ÷ çk i ÷ è ø i, j i k будуть конкретно вказувати, до якого возика і до якої системи координат відносяться одиничні орти. ( ) ( (2 ) ki Отже, орти i відносяться до системи координат з центром в точці Оі, зв'язаної жорстко з другим возиком, тобто до системи коор(2 ) (2 ) та i ik , j ic , k ic æ i( 2) ö ç ik ÷ ç j(2 ) ÷ = ç ic2) ÷ ç k( ÷ ç ic ÷ è ø O iz( 2 ) - вісь зовні шньо ї рамки, яка співпада є з i (2 ) (2 ) танні стержня 9 на кути (внутрішня вісь карданового підвісу 4). Вісь ( 2 ) ( 2) i i , ji (2 ) між ортами i i , j i , k i ) ( ) (2 ) динат O ix( 2) y( 2 ) z( 2) . Орти i ik , j ic , k ic відносяться i i i до системи координат, зв'язаної зі стержнем 9, тобто до системи координат O ix( 2) y( 2 ) z( 2) . ik ic ic 3 31185 З урахуванням виразу (3) із (13) отримаємо: æ i(1) ö æ i(2 ) ö ç i +1 ÷ ç i ÷ ( 1) ç j ÷ = M(1) M( 2 ) ç j( 2) ÷. (14) i +1 ÷ i +1 i cç i ç (1) ÷ (2 ) ç ki + 1 ÷ çk i ÷ è ø è ø Вираз (14) зв'язує безпосередньо систему ко1 ординат O i+ 1x( 1) y (+)1z( 1) , зв'язану жорстко з возиi +1 i i +1 Вираз (8) визначає вектор O iO i+ 1 (вектор стерж ня 9) в системі координат, жорстко зв'язану з візком 2 (верхній індекс), який знаходиться в і-тій точці свердловини (нижній індекс). ( )( ) Вісь x (1)k карданового підвісу 3 візка 1 (верхi+1 ній індекс), як видно із фіг. 1 та фіг. 2, жорстко зв'язана з вісью Oi x( 2 ) карданового підвісу 4 возика 2 ik ком 1, вісь O i+ 1y (1)1 якої направлена в точці і+1 по i+ дотичній до осі свердловини, з системою координат O ix( 2) y( 2 ) z( 2) , зв'язану жорстко з возиком 2, i i i стержнем 9 (ОіОi+1) і паралельна цій осі ( Oi x( 2 ) ) згідik но з конструкцією. Створюється система координат O i+ 1x( 1) k y (1)1c z (1)1c , паралельна системі коордиi +1 i + i+ вісь Oi y( 2 ) якої направлена в точці і по дотичній до i осі свердловини. Таким чином, якщо відома система координат ( 2) ö æi ç i ÷ ç j(2 ) ÷ , зв'язана з возиком 2, то провівши вимірюç i( 2 ) ÷ ç ÷ ç ki ÷ è ø нат O ix( 2) y( 2 ) z( 2) , тому що осі Oi y( 2 ) та O i+ 1y( 1) c ik ic ic ic i +1 співпадають (направлені вздовж стержня 9), а осі Oi x( 2 ) та O i+ 1x (1)1k паралельні. Отже: ik i+ æ i(1) ö æ i(2 ) ö ç i +1k ÷ ç ik ÷ ç j(1) ÷ = ç j(2 ) ÷. ç i(+11c ÷ ç ic2 ) ÷ ç ki +) c ÷ ç k ( ÷ ç 1 ÷ ç ic ÷ è ø è ø (9) вання кутів a ( 2) , b ( 2 ) , a ( 1) , b (1) , визначивши матi i i +1 i+1 ( ) 1 O i+ 1x( 1) y (+)1z( 1) , i +1 i i +1 Система координат зв'язана жорстко з візком 1, може бути отримана шляхом повороту відносно системи O i+ 1x( 1) k y (1)1c z (1)1c споi +1 i + i+ чатку на кут кут b (1) i+1 навколо осі a ( 1) i +1 O i+ 1x( 1) k i +1 риці A ( 2 ) i , а потім на (1) (1) (1) ( 1) (1) ність між ортами ii +1 , j i+ 1 , k i+1 та ii+ 1k , j i+ 1c , k i+ 1c : æ i(1) ö ç i +1 ÷ ç j(1) ÷ = ç i(+11 ÷ ç ki +) ÷ ç 1÷ è ø 1 æ cos a (1)1 sina (1) cos b (1)1 sina (+)1 sinb (1) ö i+ i +1 i+ i i +1 ÷ ç ( 1) (1) ( 1) (1) = ç - sina i +1 cos a i+ 1 cos b i +1 cos a i+ 1 sinb (1)1 ÷ ´ i+ ç ÷ ç ÷ 0 - sinb (1) cos b(1)1 i +1 i+ è ø æ i(1) ö ç i + 1k ÷ ( 1) ´ ç ji+ 1c ÷. (10) ç (1) ÷ ç k i+ 1c ÷ è ø Дамо матриці у виразі (10) наступні позначення: M( 1) = i +1 ( ) ( ) æ cos a (1)1 sina (1)1 cosb (1)1 sina (1)1 sinb (1) ö i+ i+ i+ i+ i+1 ÷ ç = ç - sina (1)1 cos a(1) cosb (1) cosa (1)1 sinb(1)1 ÷ . i+ i +1 i+1 i+ i+ ç ÷ 1 ç ÷ 0 - sinb (+)1 cos b(1) i i +1 è ø ( ) (2) і M( 1)1 (11), можна з виi+ тобто вектор j i+ 1 , а також систему координат, зв'язану жорстко з возиком 1 коли він знаходиться в точці і+1. Пропонуємий спосіб визначення координат і орієнтації осі свердловини виконують наступним чином. На початку свердловини (дів. фіг. 3 точка О) вибирають довільну систему координат Oxyz. Вводять в свердловину спочатку возик 1, пересувають його вздовж поздовжньої осі свердловини без поворотів навколо осі свердловини до такого положення, поки на початку свердловини в точці О не буде встановлений возик 2, при цьому вимірюють довжину шляху S (1) при допомозі колеO1 са 5 возика 1. Зупиняють возики і, на початку свердловини, любим відомим методом визначають зв'язок між системами координат Ox ( 2 ) y( 2 ) z( 2 ) та Oxyz, O O O тобто визначають залежність: æ i(2 ) ö æi ö ç O ÷ ç ÷ ç j(2 ) ÷ = M(2 ) ç j ÷, (15) O ÷ O ç ( 2) ç ÷ çk ÷ ç kO ÷ è ø è ø (2 ) де MO - матриця, яка визначає положення осей навколо осі (див. фіг. 2). Із фіг. 2 випливає наступна матрична залеж( 1) c разу (8) визначити вектор O iO i+ 1 , а із виразу (14) напрямок дотичної до осі свердловини в точці і+1, O i+1z (1) i +1 ( 1) ( ) (7), M(2 ) i ( ) (11) системи координат Ox ( 2 ) y( 2 ) z( 2 ) , жорстко зв'язаної O O O з возиком 2 (верхній індекс), відносно вибраної системи координат Oxyz при знаходженні возика 2 в Тоді вираз (10) набуде вигляду: æ i(1) ö æ i(1) ö ç i +1 ÷ ç i+ 1k ÷ ( 1) ç j ÷ = M(1) ç j(1) ÷. (12) i + 1 ç i +1c ÷ ç i(+1 ÷ 1) (1) ç ki + 1 ÷ ç k i+ 1c ÷ è ø è ø Враховуючи вираз (9), із (12) отримаємо: æ i(1) ö æ i(2 ) ö ç i +1 ÷ ç ik ÷ ( 1) ç j ÷ = M(1) ç j(2 ) ÷. (13) i +1 ç ic ÷ ç i(+11 ÷ ) (2 ) ç ki + 1 ÷ ç k ic ÷ è ø è ø точці О (нижній індекс), i, j, k - орти вибраної системи координат Oxyz. Вимірюють кути поворотів a ( 2) , b ( 2 ) карданоO O вого підвісу 4 і визначають, згідно (2) і (7) матриці ( M(2 ) c та A ( 2 ) . Вимірюють кути поворотів a 11) , O O ( ) ( ) ( b11) ( ) ( ) карданового підвісу 3 і визначають згідно (11) ( ) матрицю M( 1) . 1 4 31185 Використовуючи (8) і (15), визначають вектор прямок дотичної до осі свердловини в точці O2, OO 1 , а, отже, і координати точки О1 в вибраній системі координат Oxyz: æ i(2 ) ö æ iö ç O ÷ ç ÷ (2 ) (2 ) ç ÷ = A( 2) M( 2) ç j ÷. OO 1 = A O j (16) O O ç O2 ) ÷ ç ÷ ( ç k÷ ç kO ÷ è ø è ø Використовуючи (14) та (15), визначають сис( ( ( тему координат O1x11) y11) z11) , зв'язану жорстко з возиком 1, який находиться в точці 1: æ i(1) ö æi ö ç 1 ÷ ç ÷ ç j(1) ÷ = M(1) M(2 ) M(2 ) ç j ÷. (17) 1 ÷ 1 O c O ç (1) ç ÷ çk ÷ ç k1 ÷ è ø è ø тобто вектор j 2 , а також систему координат, жорстко зв'язану з возиком 1 при його розташуванні в точці O2. Координати точки O2 визначаються із виразу: (19) OO 2 = OO 1 + O1O 2 , ( ) (1) ( )( ) ( або з урахуванням (16), (8) та (18) æ iö ç ÷ ç j ÷ . (20) OO 2 = + ç ÷ ç k÷ è ø Після цього пересувають возики 1 і 2 в таке положення при якому шлях возика 2 S( 2) буде до12 [ ( )( ) ( )( A (2 ) O )( ) ( ) згідно (2) та ( ) 1 M(2 ) M( 2 ) O (1) æ i(1) ö ç i ÷ ç j(1) ÷ = M(1) M(2 ) M(1) M(2 ) i i- 1 c i- 1 i- 2 ç i(1) ÷ ç ki ÷ è ø ( ( ( ( займала система координат O1x11) y11) z11) , коли возик 1 знаходився в точці О1, тобто згідно (17): æ i( 2) ö æ i(1) ö æi ö ç 1 ÷ ç 1 ÷ ç ÷ ç j(2 ) ÷ = ç j(1) ÷ = M(1) M(2 ) M(2 ) ç j ÷. (18) 1 ÷ 1 ÷ 1 O c O ç ( 2) ç (1) ç ÷ çk ÷ ç k1 ÷ ç k 1 ÷ è ø è ø è ø ( Виконуючи вимірювання кутів a ( 2) , b12 ) , a (1) , 1 2 )( ) ( )( з виразу ) × ×× c æ iö ç ÷ ç j÷. × ×× (22) ç ÷ çk ÷ è ø Таким чином, пропонуємий спосіб дозволяє послідовно визначати координати осі свердловини ( M(1) 1 )( ) ( ) )( ) ( ) M( 2 ) c O M( 2 ) O (1) (вектор OO i ) та її орієнтацію (вектор j i ) в точках розташування першого возика в моменти, коли другий возик займає місце попереднього розташування першого возика. ( ) згідно (7), M(2 ) 1 )( ) ( )] M( 2 ) c O дно (14) і (18) визначають як вектор j i динат O1 x( 2 ) y( 2 ) z( 2 ) буде займати положення, яке 1 1 1 ( ) ( M11) вимірюють шлях возика 1 S (1) , запоминають його, 23 і виконують вимірювання кутів карданових підвісів. Цю операцію повторюють доти, поки перший возик займе кінцеве потрібне положення в свердловині. Координати будь-якої точки Оі визначають із виразу (21) OO i = OO 1 + O1O 2 + × × × + Oi -1O i , а напрям дотичної до осі свердловини в точці і згі Орт j1 являє собою дотичну до поздовжньої осі свердловини в точці О1, виражений згідно (17) в вибраній системі координат Oxyz. Після цього пересувають возики 1 і 2 вздовж осі свердловини без їх обертання навколо цієї осі і вимірюють шляхи, які проходять колеса 5 і 6 (від(1 2 повідно S12) і S(O1) ). При S( 1) = S( 21) возик 2 займе 12 O попереднє положення возика 1 в точці О1, а возик 2 займе положення в точці O2. Так як при русі вздовж свердловини возики 1 і 2 не поверталися навколо згаданої осі і S( 1) = S( 21) , то система коор12 O b (1) , визначивши матриці A ( 2 ) 2 1 ( A12 ) (1 рівнювати попередньому шляхо ві возика 1 S12) , (1) ( M( 2 ) O c згідно (11), з виразу (8) визна чають вектор O1O 2 , а з виразу (14) визначають на Фіг. 1 5 31185 Фіг. 2 Фіг. 3 __________________________________________________________ ДП "Український інститут промислової власності" (Укрпатент) Україна, 01133, Київ-133, бульв. Лесі Українки, 26 (044) 295-81-42, 295-61-97 __________________________________________________________ Підписано до друку ________ 2002 р. Формат 60х84 1/8. Обсяг ______ обл.-вид. арк. Тираж 35 прим. Зам._______ ____________________________________________________________ УкрІНТЕІ, 03680, Київ-39 МСП, вул. Горького, 180. (044) 268-25-22 ___________________________________________________________ 6
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for determination of coordinates and orientation of axis of well
Автори англійськоюAnuprienko Hennadii Yefremovych, Karpachov Yurii Andriiovych, Rudyk Yurii Mykytovych
Назва патенту російськоюСпособ определения координат и ориентации оси скважины
Автори російськоюАнуприенко Геннадий Ефремович, Карпачев Юрий Андреевич, Рудик Юрий Никитович
МПК / Мітки
МПК: G01C 9/00, E21B 47/02
Мітки: визначення, осі, свердловини, координат, спосіб, орієнтації
Код посилання
<a href="https://ua.patents.su/6-31185-sposib-viznachennya-koordinat-ta-oriehntaci-osi-sverdlovini.html" target="_blank" rel="follow" title="База патентів України">Спосіб визначення координат та орієнтації осі свердловини</a>
Спосіб визначення орієнтації осі свердловини

Номер патенту: 30032
Опубліковано: 15.11.2000
Автори: Карпачов Юрій Андрійович, Анупрієнко Генадій Єфремович, Гусєв Олексій Володимирович, Рудик Юрій Микитович
МПК: G01C 9/00, E21B 47/02, E21B 47/00
Мітки: спосіб, орієнтації, визначення, свердловини, осі
Формула / Реферат:
1. Спосіб визначення орієнтації осі свердловини, який містить операції вимірювання проекцій вектора сили тяжіння та проекцій вектора абсолютної кутової швидкості обертання Землі на ортогональні осі системи координат гіроскопічного інклінометра, розташованного в свердловині, який відрізняється тим, що на поверхні свердловини вибирають систему координат oxyz, де вісь oz спрямована по вертикалі Землі, а в площині yoz розташований вектор
Пристрій визначення орієнтації осі візира
Номер патенту: 30199
Опубліковано: 15.11.2000
Автори: Беляєва Галина Григорівна, Плита Олександр Андрійович, Черняк Сергій Іванович, Полєжаєв Віктор Вікторович
МПК: G02B 23/00
Мітки: орієнтації, визначення, візира, осі, пристрій
Формула / Реферат:
Пристрій визначення орієнтації осі візира, що містить візир, встановлений на рухомій основі, наприклад, на захисному шоломі оператора, складений із освітлювача, марки (сітки), об'єктиву та нахиленої плоскопаралельної пластини, який відрізняється тим, що до нього введено блок вимірювання параметрів розвороту, блок завдання початку відліку, запам'ятовуючий пристрій, суматор та інтегратор, а до візиру додатково встановлено у фокальній поверхні...
Пристрій визначення орієнтації осі візира
Номер патенту: 30190
Опубліковано: 15.11.2000
Автори: Полєжаєв Віктор Вікторович, Беляєва Галина Григорівна, Бузанов Віктор Іванович, Плита Олександр Андрійович, Черняк Сергій Іванович
МПК: G02B 23/00
Мітки: орієнтації, пристрій, визначення, осі, візира
Формула / Реферат:
Пристрій визначення орієнтації вісі візира, який містить в собі візир, встановлений на рухомій основі, наприклад, на захисному шоломі оператора, складений із освітлювача, марки (сітки), об'єктиву і похилої напівпрозорої пластини, який відрізняється тим, що в його склад введені блок виміру параметрів розвороту, блок задання початку відліку, блок корекції, блок інтеграторів, косинусний перетворювач і пристрій поділу, а в візир введений...
Спосіб визначення напрямку орієнтації оптичної осі оптично-анізотропних полярних одновісних кристалів
Номер патенту: 25657
Опубліковано: 30.10.1998
Автори: Мельничук Олександр Володимирович, Пасічник Юрій Архипович, Венгер Євген Федорович
МПК: G01N 21/17
Мітки: одновісних, полярних, осі, оптично-анізотропних, орієнтації, визначення, оптично, спосіб, напрямку, кристалів
Формула / Реферат:
Спосіб визначення напрямку орієнтації оптичної осі оптично-анізотропних полярних одновісних кристалів, який полягає в тому, що на плоску поверхню монокристала направляють пучок лінійно-поляризованого інфрачервоного випромінювання, реєструють коефіцієнт відбивання відбитого від плоскої поверхні випромінювання, який відрізняється тим, що направляють пучок випромінювання з області залишкових променів оптично-анізотропного одновісного полярного...
Спосіб визначення орієнтації фібрил колагенових волокон остеонів кістки

Номер патенту: 31171
Опубліковано: 15.12.2000
Автори: Антонюк Ольга Петрівна, Пішак Василь Павлович, Ушенко Юрій Олександрович, Ушенко Олександр Григорович, Григоришин Петро Михайлович, Круцяк Володимир Миколайович
МПК: A61N 5/06
Мітки: колагенових, фібрил, кістки, остеонів, орієнтації, волокон, спосіб, визначення
Формула / Реферат:
Спосіб визначення орієнтації фібрил колагенових волокон остеонів кістки полягає у тому, що формують мікроскопічне зображення мікропрепарату кістки у схрещених поляризаторі та аналізаторі, візуально оцінюють орієнтацію фібрил колагенових волокон остеонів за напрямками освітлених ділянок у мікроскопічному поляризаційному зображенні мікропрепарату кістки який відрізняється тим, що використовують висококогерентне плоскополяризоване...
Попередній патент: Гідродинамічний змішувач
Наступний патент: Маховик перемінного моменту інерції
Випадковий патент: Спосіб збереження скоротливості лівого шлуночка при протезуванні мітрального клапана