Спосіб визначення об’єму рідини у резервуарі
Номер патенту: 47683
Опубліковано: 15.07.2002
Автори: Дашківський Вадим Олексійович, Ісак Омелян Гаврилович, Яцко Ласло Дюлович
Формула / Реферат
Спосіб визначення об'єму рідини у резервуарі, що заснований на вимірюванні рівня рідини за допомогою датчика рівня, за показниками якого методом аналітичної геометрії визначають координати точки перетину осі датчика з площиною вільної поверхні рідини в резервуарі, а також визначають положення цієї площини в системі координат, прив'язаної до резервуара, а потім методом інтегрування обчислюють об'єм рідини, що обмежений площиною вільної поверхні рідини та внутрішньою поверхнею резервуара, математична модель якої попередньо задана, який відрізняється тим, що для визначення положення площини вільної поверхні рідини в резервуарі додатково вимірюють напрямок сумарного вектора сил, що діють на рідину.
Текст
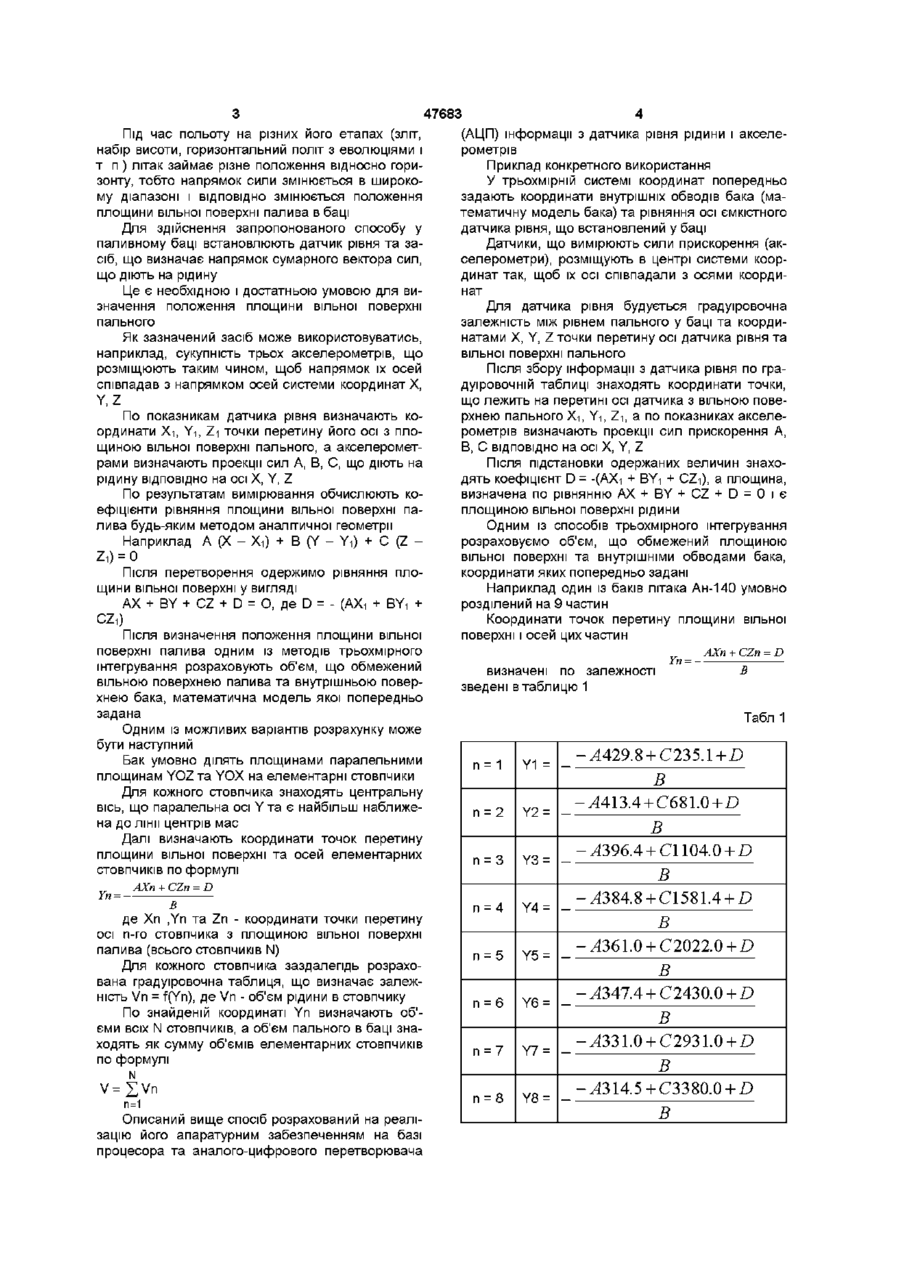
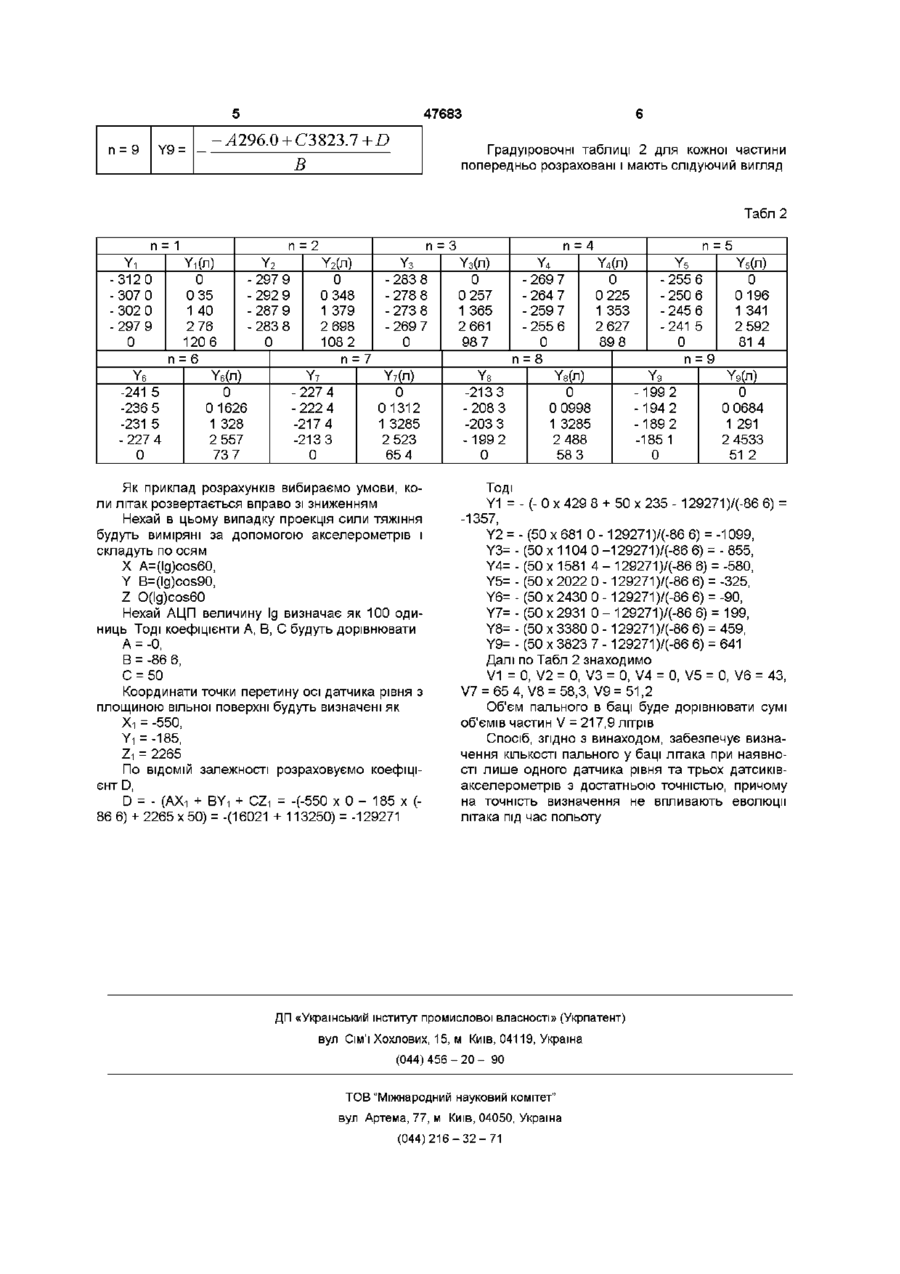
Спосіб визначення об'єму рідини у резервуарі, що заснований на вимірюванні рівня рідини за допомогою датчика рівня, за показниками якого методом аналітичної геометрії визначають коор динати точки перетину осі датчика з площиною вільної поверхні рідини в резервуарі, а також визначають положення цієї площини в системі координат, прив'язаної до резервуара, а потім методом інтегрування обчислюють об'єм рідини, що обмежений площиною вільної поверхні рідини та внутрішньою поверхнею резервуара, математична модель якої попередньо задана, який відрізняється тим, що для визначення положення площини вільної поверхні рідини в резервуарі додатково вимірюють напрямок сумарного вектора сил, що діють на рідину Винахід відноситься до способів призначених для контролю КІЛЬКОСТІ рідини у резервуарах транспортних засобів, в тому числі для визначення КІЛЬКОСТІ палива у баках літака Найбільш близьким аналогом до запропонованого винаходу є спосіб визначення об'єму рідини у резервуарі, патент України № 32382 МКІ G01F 17/00, 23/30, публ 15 12 2000 Бюл №7-11 Зазначений спосіб заснований на вимірюванні об'єму рідини за допомогою щонайменше трьох датчиків рівня рідини, причому зазначені датчики встановлені в резервуарі таким чином, що їх осі не лежать в одній площині, що дозволяє визначити положення вільної поверхні рідини по координатах точок перетину вільної поверхні рідини з осями датчиків рівня На основі отриманих даних методом інтегрування обчислюється об'єм рідини, що обмежений площиною вільної поверхні рідини та внутрішньою поверхнею резервуара, математична модель якої попередньо задана До недоліків даного способу відноситься обмежена можливість його застосування, зокрема, коли конструкція резервуара не дозволяє розмістити три датчика рівня таким чином, щоб забезпечити необхідну точність вимірювання Крім того, в експлуатації знаходиться значна КІЛЬКІСТЬ літаків що потребують модернізації систем визначення КІЛЬКОСТІ пального, в баках яких встановлено по одному датчику рівня пального, що робить несприйнятним відомий спосіб визна чення КІЛЬКОСТІ пального в баках літаків Запропонований спосіб дозволяє виключити зазначені недоліки Завданням винаходу є створення способу визначення КІЛЬКОСТІ рідини у резервуарі, в якому за рахунок визначення напрямку сумарного вектора сил, що діють на рідину, та показниках лише одного датчика рівня, визначається положення площини вільної поверхні рідини, що дозволяє врахувати вплив еволюцій літака під час польоту (крен, тангаж, прискорення і т п) на результати вимірювання Поставлене завдання досягається тим, що у способі визначення об'єму рідини у резервуарі, що заснований на вимірюванні рівня рідини за допомогою датчика рівня, за показниками якого методом аналітичної геометрії визначають координати точки перетину осі датчика з площиною вільної поверхні рідини в резервуарі, а , також визначають положення цієї площини в системі координат, прив'язаної до резервуара, а потім методом інтегрування обчислюють об'єм рідини, що обмежений площиною вільної поверхні та внутрішньою поверхнею резервуара, математична модель якої попередньо задана, згідно з винахідом для визначення положення площини вільної поверхні рідини в резервуарі додатково вимірюють напрямок сумарного вектора сил, що діють на рідину Для визначення положення вільної поверхні в винаході використана відома властивість - площина вільної поверхні рідини завжди перпендикулярна напрямку сумарного вектора сил, що діють на рідину CO 00 (О Під час польоту на різних його етапах (зліт, набір висоти, горизонтальний політ з еволюціями і т п ) літак займає різне положення відносно горизонту, тобто напрямок сили змінюється в широко 47683 му діапазоні і ВІДПОВІДНО ЗМІНЮЄТЬСЯ положення площини вільної поверхні палива в баці Для здійснення запропонованого способу у паливному баці встановлюють датчик рівня та засіб, що визначає напрямок сумарного вектора сил, що діють на рідину Це є необхідною і достатньою умовою для визначення положення площини вільної поверхні пального Як зазначений засіб може використовуватись, наприклад, сукупність трьох акселерометрів, що розміщюють таким чином, щоб напрямок їх осей співпадав з напрямком осей системи координат X, Y, Z По показникам датчика рівня визначають координати Х-і, Y-i, Zi точки перетину його осі з площиною вільної поверхні пального, а акселерометрами визначають проекції сил А, В, С, що діють на рідину ВІДПОВІДНО на осі X, Y, Z По результатам вимірювання обчислюють коефіцієнти рівняння площини вільної поверхні палива будь-яким методом аналітичної геометрії Наприклад А (X - Хі) + В (Y - Yi) + С (Z Після перетворення одержимо рівняння площини вільної поверхні у вигляді АХ + BY + CZ + D = О, де D = - (АХі + BYi + Після визначення положення площини вільної поверхні палива одним із методів трьохмірного інтегрування розраховують об'єм, що обмежений вільною поверхнею палива та внутрішньою поверхнею бака, математична модель якої попередньо задана Одним із можливих варіантів розрахунку може бути наступний Бак умовно ділять площинами паралельними площинам YOZTa YOX на елементарні стовпчики Для кожного стовпчика знаходять центральну вісь, що паралельна осі YTa є найбільш наближена до лінії центрів мас Далі визначають координати точок перетину площини вільної поверхні та осей елементарних стовпчиків по формулі Yn = 4 (АЦП) інформації з датчика рівня рідини і акселерометрів Приклад конкретного використання У трьохмірній системі координат попередньо задають координати внутрішніх обводів бака (математичну модель бака) та рівняння осі ємкістного датчика рівня, що встановлений у баці Датчики, що вимірюють сили прискорення (акселерометри), розміщують в центрі системи координат так, щоб їх осі співпадали з осями координат Для датчика рівня будується градуїровочна залежність між рівнем пального у баці та координатами X, Y, Z точки перетину осі датчика рівня та вільної поверхні пального Після збору інформації з датчика рівня по градуїровочній таблиці знаходять координати точки, що лежить на перетині осі датчика з вільною поверхнею пального Х-і, Y-і, Z^\, а по показниках акселерометрів визначають проекції сил прискорення А, В, С ВІДПОВІДНО на осі X, Y, Z Після підстановки одержаних величин знаходять коефіцієнт D = -(АХі + BYi + CZ-i), а площина, визначена по рівнянню A X + B Y + C Z + D = O i e площиною вільної поверхні рідини Одним із способів трьохмірного інтегрування розраховуємо об'єм, що обмежений площиною вільної поверхні та внутрішніми обводами бака, координати яких попередньо задані Наприклад один із баків літака Ан-140 умовно розділений на 9 частин Координати точок перетину площини вільної поверхні і осей цих частин визначені по залежності зведені в таблицю 1 Табл 1 п= 1 Y1 = п= 2 Y2 = п= 3 Y3 = п= 4 Y4 = п= 5 Y5 = п= 6 Y6 = п= 7 Y7 = п= 8 Y8 = АХп + CZn = D в де Xn ,Yn та Zn - координати точки перетину осі п-го стовпчика з площиною вільної поверхні палива (всього стовпчиків N) Для кожного стовпчика заздалегідь розрахована градуїровочна таблиця, що визначає залежність Vn = f(Yn), де Vn - об'єм рідини в стовпчику По знайденій координаті Yn визначають об'єми всіх N стовпчиків, а об'єм пального в баці знаходять як сумму об'ємів елементарних стовпчиків по формулі N V=£Vn п=1 Описаний вище спосіб розрахований на реалізацію його апаратурним забезпеченням на базі процесора та аналого-цифрового перетворювача АХп + CZn = D Yn = — -y4429.8 + C 2 3 5 . 1 + D В -y4413.4 + C681.0+D В -y4396.4 + C1104.0 + D В -y4384.8 + C1581.4 + D В -y4361.0 + C2022.0 + D В -y4347.4 + C2430.0 + D В -y4331.0 + C2931.0 + D В -y4314.5 + C3380.0 + D В 47683 5 n=9 Y9 = -Л296. 0 + C3823П + D В Градуїровочні таблиці 2 для кожної частини попередньо розраховані і мають слідуючий вигляд Табл 2 n=2 п =1 Yi -312 -307 -302 -297 0 Y2 Yi(n) 0 0 -297 0 0 35 -292 0 1 40 -287 9 2 76 -283 120 6 0 п =6 Y6 Ye(n) -241 5 0 -236 5 0 1626 -231 5 1 328 -227 4 2 557 0 73 7 9 9 9 8 n=3 Y2(n) 0 0 348 1 379 2 698 108 2 n=7 Y7 -227 4 -222 4 -217 4 -213 3 0 Y3 -283 -278 -273 -269 0 8 8 8 7 Y7(n) 0 0 1312 1 3285 2 523 65 4 Як приклад розрахунків вибираємо умови, коли літак розвертається вправо зі зниженням Нехай в цьому випадку проекція сили тяжіння будуть виміряні за допомогою акселерометрів і складуть по осям X A=(lg)cos60, Y B=(lg)cos90, Z O(lg)cos60 Нехай АЦП величину Ig визначає як 100 одиниць Тоді коефіцієнти А, В, С будуть дорівнювати А = -0, В = -86 6, С = 50 Координати точки перетину осі датчика рівня з площиною вільної поверхні будуть визначені як Хі = -550, Yi = -185, Zi = 2265 По ВІДОМІЙ залежності розраховуємо коефіцієнт D, D = - (АХі + BYi + CZi = -(-550 х 0 - 185 х (86 6) + 2265 х 50) = -(16021 + 113250) = -129271 n=4 Y3(n) 0 0 257 1 365 2 661 98 7 Y8 -213 3 -208 3 -203 3 -199 2 0 Y4 -269 -264 -259 -255 0 n=8 7 7 7 6 Y4(n) 0 0 225 1 353 2 627 89 8 Ys(n) 0 0 0998 1 3285 2 488 58 3 n=5 Y5 Ys(n) -255 6 0 -250 6 0 196 -245 6 1 341 -241 5 2 592 0 81 4 n=9 Y9 Yg(n) -199 2 0 -194 2 0 0684 -189 2 1 291 -185 1 2 4533 0 51 2 Тоді Y1 = - (- 0 х 429 8 + 50 х 235 - 129271 )/(-86 6) = -1357, Y2 = - (50 х 681 0 -129271 )/(-86 6) = -1099, Y3= - (50 х 1104 0 -129271 )/(-86 6) = - 855, Y4= - (50 х 1581 4 - 129271 )/(-86 6) = -580, Y5= - (50 х 2022 0 -129271 )/(-86 6) = -325, Y6= - (50 х 2430 0 -129271 )/(-86 6) = -90, Y7= - (50 х 2931 0 - 129271 )/(-86 6) = 199, Y8= - (50 х 3380 0 -129271 )/(-86 6) = 459, Y9= - (50 х 3823 7 -129271 )/(-86 6) = 641 Далі по Табл 2 знаходимо V1 = 0, V2 = 0, V3 = 0, V4 = 0, V5 = 0, V6 = 43, V7 = 65 4, V8 = 58,3, V9=51,2 Об'єм пального в баці буде дорівнювати сумі об'ємів частин V = 217,9 літрів Спосіб, згідно з винаходом, забезпечує визначення КІЛЬКОСТІ пального у баці літака при наявності лише одного датчика рівня та трьох датсиківакселерометрів з достатньою точністью, причому на точність визначення не впливають еволюції літака під час польоту ДП «Український інститут промислової власності» (Укрпатент) вул Сім'ї Хохлових, 15, м Київ, 04119, Україна ( 0 4 4 ) 4 5 6 - 2 0 - 90 ТОВ "Міжнародний науковий комітет" вул Артема, 77, м Київ, 04050, Україна (044)216-32-71
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for determining the liquid in a tank volume
Автори англійськоюYatsko Laslo Diulovych
Назва патенту російськоюМетод определения объема жидкости в резервуаре
Автори російськоюЯцко Ласло Дюлович
МПК / Мітки
МПК: G01F 23/30, G01F 17/00
Мітки: визначення, об'єму, рідини, спосіб, резервуарі
Код посилання
<a href="https://ua.patents.su/3-47683-sposib-viznachennya-obehmu-ridini-u-rezervuari.html" target="_blank" rel="follow" title="База патентів України">Спосіб визначення об’єму рідини у резервуарі</a>
Спосіб визначення кількості рідини у резервуарі
Номер патенту: 32385
Опубліковано: 15.12.2000
Автори: Дашківський Вадим Олексійович, Ісак Омелян Гаврилович, Яцко Ласло Дюлович
МПК: G01F 23/00, G01F 17/00
Мітки: спосіб, рідини, резервуарі, кількості, визначення
Формула / Реферат:
Спосіб визначення об'єму рідини у резервуарі, що заснований на вимірюванні рівня рідини за допомогою датчика рівня, який відрізняється тим, що вимірювання рівня рідини здійснюють за допомогою щонайменше трьох датчиків рівня, причому зазначені датчики встановлюють в резервуарі таким чином, що їх осі не лежать в одній площині, по показниках датчиків рівня методами аналітичної геометрії визначають координати точок перетину осей датчиків рівня з...
Спосіб визначення маси окремих компонентів двошарової рідини у резервуарі
Номер патенту: 40176
Опубліковано: 16.07.2001
Автор: Нікітінський Михайло Павлович
МПК: G01N 9/00
Мітки: маси, визначення, окремих, рідини, резервуарі, двошарової, спосіб, компонентів
Формула / Реферат:
Спосіб визначення маси окремих компонентів двошарової рідини у резервуарі, при якому поплавець визначеної форми та постійної маси поміщують у досліджувальну рідину, вимірюють датчиком виштовхуючу силу, яка дорівнює масі рідини, що витискається поплавцем, обчислюють густину як масу у фіксованому об'ємі, який відрізняється тим, що поплавець жорстко зв'язаний з відкалібруваним силовимірювальним датчиком занурюють у досліджувальну рідину по...
Пристрій для визначення рівня рідини в резервуарі
Номер патенту: 6455
Опубліковано: 29.12.1994
Автори: Жуков Юрій Даниїлович, Половніков Валєрій Алєксандровіч, Гордєєв Борис Миколайович, Алєксандров Михайло Миколайович
МПК: G01F 23/24
Мітки: рідини, пристрій, визначення, резервуарі, рівня
Формула / Реферат:
(57) Устройство для определения уровня жидкости в резервуаре, содержащее чувствительный элемент, выполненный в виде двух изолированных друг от друга проводников, подключенный к выходу генератора и входу приемника, выход которого соединен со входом усилителя, и индикатор, отличающееся тем, что в него введены не менее двух чувствительных элементов, расположенных на разных уровнях и подключенных к выходу генератора и входу приемника, и...
Спосіб управління рівнем рідини у резервуарі конденсатно-живильного тракту парової турбоустановки
Номер патенту: 18694
Опубліковано: 25.12.1997
Автори: Нікітін Юрій Васильович, Сіренко Геннадій Іванович, Королько Людмила Василівна, Макаренко Микола Іванович
МПК: F22D 5/00
Мітки: конденсатно-живильного, рідини, резервуарі, тракту, управління, рівнем, турбоустановки, спосіб, парової
Формула / Реферат:
Способ управления уровнем жидкости в резервуаре конденсатно-питательного тракта паровой турбоустановки путем измерения текущих значений уровня жидкости в резервуаре и положения регулирующего клапана и изменения положения регулирующего клапана по изменению уровня жидкости, отличающийся тем, что измеряют расход жидкости через регулирующий клапан и после выдачи каждого управляющего сигнала запоминают значения положения регулирующего клапана и...
Пристрій для розігріву рідини в резервуарі
Номер патенту: 14532
Опубліковано: 09.01.1997
Автор: Коваль Володимир Павлович
МПК: B65D 88/74
Мітки: розігріву, резервуарі, пристрій, рідини
Формула / Реферат:
1. Устройство для разогрева жидкости в резервуаре, содержащее паропровод с нагревателем, выполненным в виде штанги, соединенной с парораспределителями, имеющими элементы закрывания отверстий, надетую на штангу трубу с тягами и откидные трубы с соплами на конце, отличающееся тем, что оно снабжено подъемно-опускным механизмом и опорными стоиками, причем нижнее основание каждой из них закреплено на парораспределителе, а на верхнем окончании...
Попередній патент: Спосіб введення зонда у шлунок
Наступний патент: Пристрій для захисту свердловин від ударних хвиль і гідропотоку
Випадковий патент: Спосіб одержання поліуретанів