Пристрій для автоматичного керування групою синхронних двигунів
Номер патенту: 48266
Опубліковано: 10.03.2010
Автори: Паламарчук Олеся Петрівна, Григораш Юлія Анатоліївна, Демов Олександр Дмитрович
Формула / Реферат
Пристрій для автоматичного керування групою синхронних двигунів, що містить обчислювальний пристрій, виходи якого з'єднано з керуючими входами пристроїв регулювання струму збудження синхронних двигунів, який відрізняється тим, що введено n давачів реактивного навантаження синхронних двигунів та m давачів реактивної потужності, встановлених в мережах енергопостачальних компаній, причому виходи n давачів реактивного навантаження синхронних двигунів з'єднано з першими інформаційними входами обчислювального пристрою, а виходи m давачів реактивної потужності з'єднано з другими інформаційними входами обчислювального пристрою.
Текст
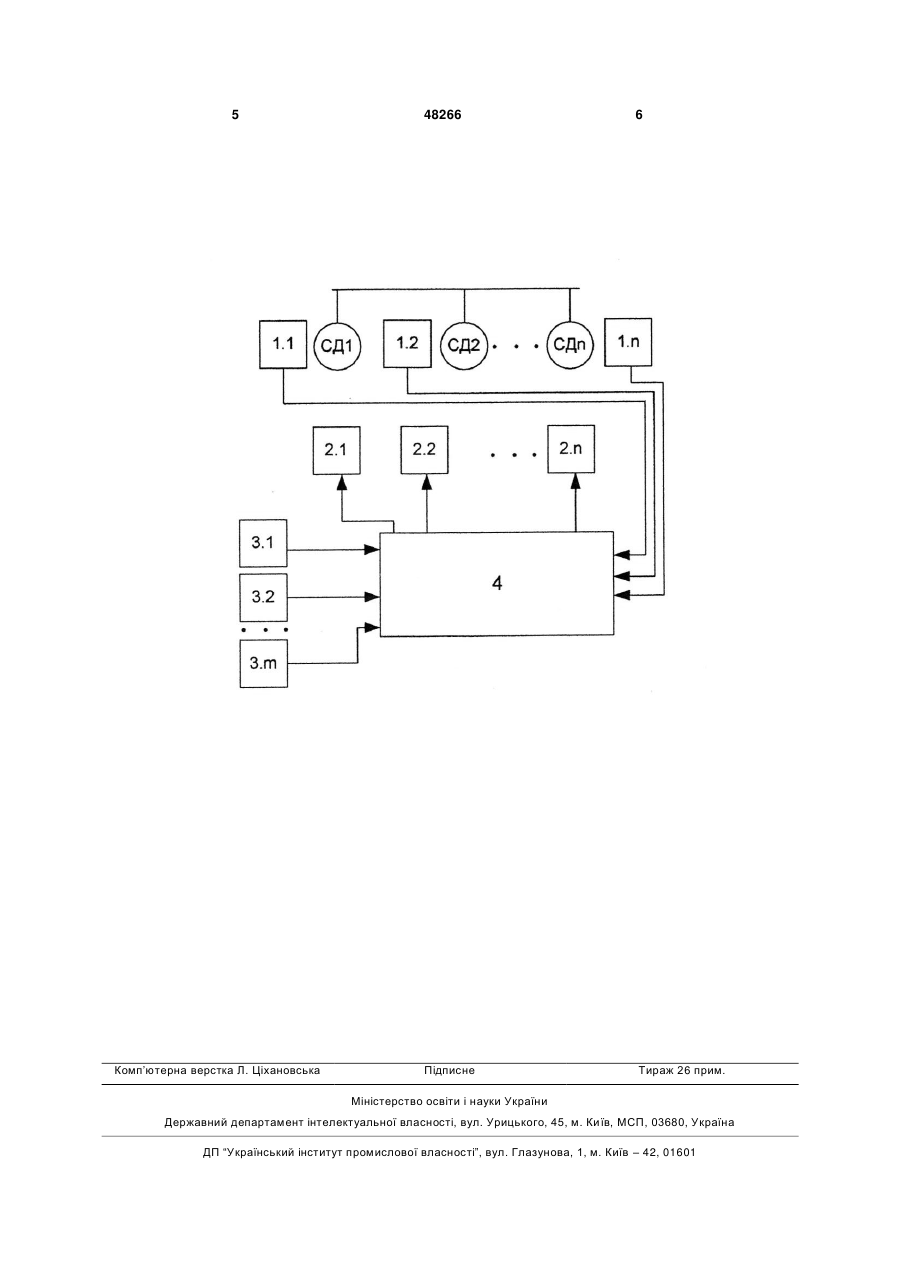
Пристрій для автоматичного керування групою синхронних двигунів, що містить обчислювальний пристрій, виходи якого з'єднано з керуючи 3 48266 генератора; lі - коефіцієнт втрат в лінії, по якій одержує живлення і-ий СД і визначається як: 10 3 ri . li 2 Uн PEK n 2 2 Uн Qн m Qi i 1 R jA Q j j 1 З приведеної формули видно, що в найближчому аналозі не враховуються втрати в мережах ЕК, які залежать від реактивних навантажень СД: P Qi di Qi i 1 n hi Q2 i i 1 n li Q2 i i 1 2 2 Uн P Qi n 1 Qi i Qн ; Q i n при виконанні обмежень Qi i 1 n di Qi i 1 Qн Qi i 1 m n R jA j 1 li Q2 , i i 1 визначення величини сумарних втрат P , в мережах СД та ЕК і, відповідно, до не правильного вибору уставок автоматичного керування збудженням СД, що, в свою чергу, не забезпечує мінімуму втрат P . Таким чином оптимальні значення реактивних навантажень СД відповідають мінімуму функції втрат P : n Qн 2 n 1 2 Uн де RjA - спільний опір для реактивних потоків Qj n та Qн Qi ; Qн - реактивне навантаження i 1 вузла А, до якого приєднано СД; Qj - реактивна n потужність j-oго вузла мереж ЕК; Qн Qi i 1 реактивна потужність, яку отримує вузол А від ЕК. Неврахування цього призводить до хибного n 4 m R jA Q j j 1 1 2 Uн n Qн Qi i 1 2 m R jA j 1 min, (1) Q ді , де Qді - допустиме реактивне навантаження і-ого СД, або hi Q2 i i 1 де dn+1, hn+1 - коефіцієнти, які формуються в залежності від Qj відповідно: m m 2 R jA Q j R jA j 1 j 1 , hn 1 . dn 1 2 2 Uн Uн В основу корисної моделі поставлено задачу створення пристрою для автоматичного керування групою СД, в якому за рахунок введення нових давачів реактивної потужності, встановлених в вузлах мережі ЕК і відповідно нових зв'язків, які з'єднують виходи давачів реактивної потужності з інформаційними входами обчислювального пристрою, з'являється можливість формування сигналу, пропорційного величині мінімальних втрат в мережах СД та ЕК, що дозволяє уникнути хибного вибору уставок СД і, відповідно, досягти найбільшого зменшення втрат. Поставлена задача досягається тим, що в пристрій для автоматичного керування групою СД, що містить обчислювальний пристрій, виходи якого з'єднано з керуючими входами пристроїв регулювання струму збудження синхронних двигунів, n давачів реактивного навантаження синхронних двигунів, виходи яких з'єднано з першими інформаційними входами обчислювального пристрою, m давачів реактивної потужності, виходи яких з'єднано з другими інформаційними входами обчислювального пристрою. n li Q2 i i 1 dn 1 Qi hn 1 Q2 i min, На кресленні представлено блок-схему пристрою для автоматичного керування групою СД. Пристрій містить обчислювальний пристрій 4, виходи якого з'єднано з керуючими входами пристроїв регулювання струму збудження синхронних двигунів 2.1, 2.2, ..., 2.n, n давачів реактивного навантаження синхронних двигунів 1.1, 1.2, ..., 1.n, виходи яких з'єднано з першими інформаційними входами обчислювального пристрою 4, m давачів реактивної потужності 3.1, 3.2, ..., 3.n, виходи яких з'єднано з другими інформаційними входами обчислювального пристрою 4. Запропонований пристрій працює так. Сигнали з n давачів реактивного навантаження СД 1.1, 1.2, ..., 1.n надходять на перші інформаційні входи обчислювального пристрою 4. Сигнали з m давачів реактивної потужності 3.1, 3.2, ..., 3.m, які установлені в вузлах реактивних навантажень в мережі ЕК, потрапляють на другі інформаційні входи обчислювального пристрою 4. Використовуючи сигнали з перших та других інформаційних входів, обчислювальний пристрій 4 відповідно математичній моделі (1) здійснює обчислення оптимальних уставок пристроїв регулювання струму збудження, які забезпечують мінімум функції P Qi і видає на керуючі виходи відповідні сигнали, що надходять на пристрої регулювання струму збудження 2.1, 2.2, ..., 2.n. 5 Комп’ютерна верстка Л. Ціхановська 48266 6 Підписне Тираж 26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюDevice for automatic control of group of synchronous motors
Автори англійськоюDemov Oleksandr Dmytrovych, Palamarchuk Olesia Petrivna, Hryhorash Yuliia Anatoliivna
Назва патенту російськоюУстройство для автоматического управления группой синхронных двигателей
Автори російськоюДемов Александр Дмитриевич, Паламарчук Олеся Петровна, Григораш Юлия Анатольевна
МПК / Мітки
МПК: G05F 1/70
Мітки: пристрій, двигунів, групою, синхронних, керування, автоматичного
Код посилання
<a href="https://ua.patents.su/3-48266-pristrijj-dlya-avtomatichnogo-keruvannya-grupoyu-sinkhronnikh-dviguniv.html" target="_blank" rel="follow" title="База патентів України">Пристрій для автоматичного керування групою синхронних двигунів</a>
Спосіб навантаження синхронних двигунів при випробуваннях і пристрій для його здійснення
Номер патенту: 69003
Опубліковано: 16.08.2004
Автори: Калінов Андрій Петрович, Блінов Роман Андрійович, Родькін Дмитро Йосипович, Чорний Олексій Петрович, Мастєровий Віктор Яковлевич, Барвінок Дмитро Володимирович
МПК: G01R 31/34
Мітки: навантаження, двигунів, спосіб, здійснення, синхронних, пристрій, випробуваннях
Формула / Реферат:
1. Спосіб навантаження синхронних двигунів при випробуваннях, який полягає в тому, що синхронний двигун підключають до перетворювача частоти, розганяють до розрахункової швидкості, змінюють момент двигуна шляхом періодичного впливу на ланцюги керування, який відрізняється тим, що синхронний двигун підключають до перетворювача частоти, розганяють до синхронної швидкості, синхронізують з мережею, підключають до мережі, задають змінну складову...
Пристрій для автоматичного керування планшетністю штаби прокату
Номер патенту: 14507
Опубліковано: 15.05.2006
Автори: Островерхов Микола Якович, Попович Микола Гаврилович
МПК: B21B 37/00
Мітки: автоматичного, штаби, пристрій, прокату, керування, планшетністю
Формула / Реферат:
Пристрій для автоматичного керування планшетністю штаби прокату, що містить датчик розподілу натягу по ширині штаби, виходи якого по числу зон вимірювання з'єднані з входами блока керування, перетворювачі частоти з рекуперативним гальмуванням, виходи яких з'єднано із входами лінійних асинхронних двигунів, встановлених під штабою відповідно до зон вимірювання натягу, датчик швидкості штаби, який з'єднано з додатковим входом блока керування,...
Пристрій для автоматичного керування планшетністю штаби прокату
Номер патенту: 22004
Опубліковано: 10.04.2007
Автори: Попович Микола Гаврилович, Островерхов Микола Якович
МПК: B21B 37/00
Мітки: пристрій, штаби, керування, автоматичного, планшетністю, прокату
Формула / Реферат:
Пристрій для автоматичного керування планшетністю штаби прокату, що містить датчик розподілу натягу по ширині штаби, виходи якого по числу зон вимірювання з'єднані з входами регуляторів, виходи яких підключені до відповідних входів суматорів, та входом вузла визначення середньоарифметичного значення натягу штаби, виходи якого підключені до інших відповідних входів регуляторів, перетворювачі частоти з рекуперативним гальмуванням, виходи яких...
Пристрій для автоматичного керування планшетністю штаби прокату
Номер патенту: 22411
Опубліковано: 25.04.2007
Автори: Попович Микола Гаврилович, Островерхов Микола Якович
МПК: B21B 37/00
Мітки: автоматичного, планшетністю, прокату, пристрій, штаби, керування
Формула / Реферат:
Пристрій для автоматичного керування планшетністю штаби прокату, що містить датчик, виходи якого по числу зон вимірювання з'єднано з входами блока керування, перетворювачі частоти з рекуперативним гальмуванням, виходи яких з'єднано із входами лінійних асинхронних двигунів, встановлених під штабою відповідно до зон вимірювання натягу, а входи - з відповідними виходами блоків заданого співвідношення частоти і величини напруги живлення, входи...
Спосіб автоматичного керування групою паралельно працюючих дробарок
Номер патенту: 22217
Опубліковано: 30.06.1998
Автори: Назаренко Володимир Михайлович, Марусич Юрій Юрійович
МПК: B02C 25/00
Мітки: паралельно, керування, групою, дробарок, спосіб, автоматичного, працюючих
Формула / Реферат:
Способ автоматического управления группой параллельно работающих дробилок, включающий измерение мощности, потребляемой каждой дробилкой, массы исходной руды, вычисление удельных затрат мощности на дробление по каждой дробилке в зависимости от потребляемой дробилками мощности и массы исходной руды и изменение размера разгрузочной щели дробилок, отличающийся тем, что перед измерением размера разгрузочной щели дробилок измеряют...
Попередній патент: Пристрій для контролю ресурсу групи комутаційних апаратів
Наступний патент: Спосіб паралельного ключового хешування
Випадковий патент: Мобільний енергетичний засіб з гідравлічним приводом розпушувачів ґрунту