Спосіб обробітку грунту
Номер патенту: 49939
Опубліковано: 15.10.2002
Автори: Боженар Віктор Якимович, Тернюк Микола Емануїлович, Нечуйвітер Леонід Іванович, Ситник Сергій Валентинович, Нечуйвітер Володимир Леонідович, Дмитрук Іван Андрійович
Формула / Реферат
1. Спосіб обробітку ґрунту з допомогою ґрунтообробного агрегату з роторним робочим органом, який рухається по поверхні ґрунту, а його роторному робочому органу надають примусового обертового руху, який відповідає напрямку швидкості обкату по поверхні ґрунту навколо його геометричної осі, розташованої паралельно поверхні ґрунту та перпендикулярно до напрямку руху ґрунтообробного агрегату, який відрізняється тим, що роторному робочому органу ґрунтообробного агрегату надають додаткового обертового руху навколо його геометричної осі в напрямку кутової швидкості його обкату по поверхні ґрунту, при цьому величину кутової швидкості цього додаткового обертового руху визначають із співвідношення:

де:
![]() - величина кутової швидкості додаткового обертового руху роторного робочого органа ґрунтообробного агрегату;
- величина кутової швидкості додаткового обертового руху роторного робочого органа ґрунтообробного агрегату;
Vг - гранична лінійна швидкість периферійних частин роторного робочого органа ґрунтообробного агрегату, при якій починається відрив часток ґрунту від цього органа;
R - відстань від поверхні ґрунту до геометричної осі роторного робочого органа ґрунтообробного агрегату;
t - глибина обробітку ґрунту;
![]() - кутова швидкість примусового обертання роторного робочого органа ґрунтообробного агрегату.
- кутова швидкість примусового обертання роторного робочого органа ґрунтообробного агрегату.
2. Спосіб обробітку ґрунту по п.1, який відрізняється тим, що значення кутової швидкості примусового обертання роторного робочого органа ґрунтообробного агрегату визначають за залежністю:

де:
Vт - швидкість транспортування ґрунтообробного агрегату по поверхні ґрунту (при проведенні обробітку).
Текст
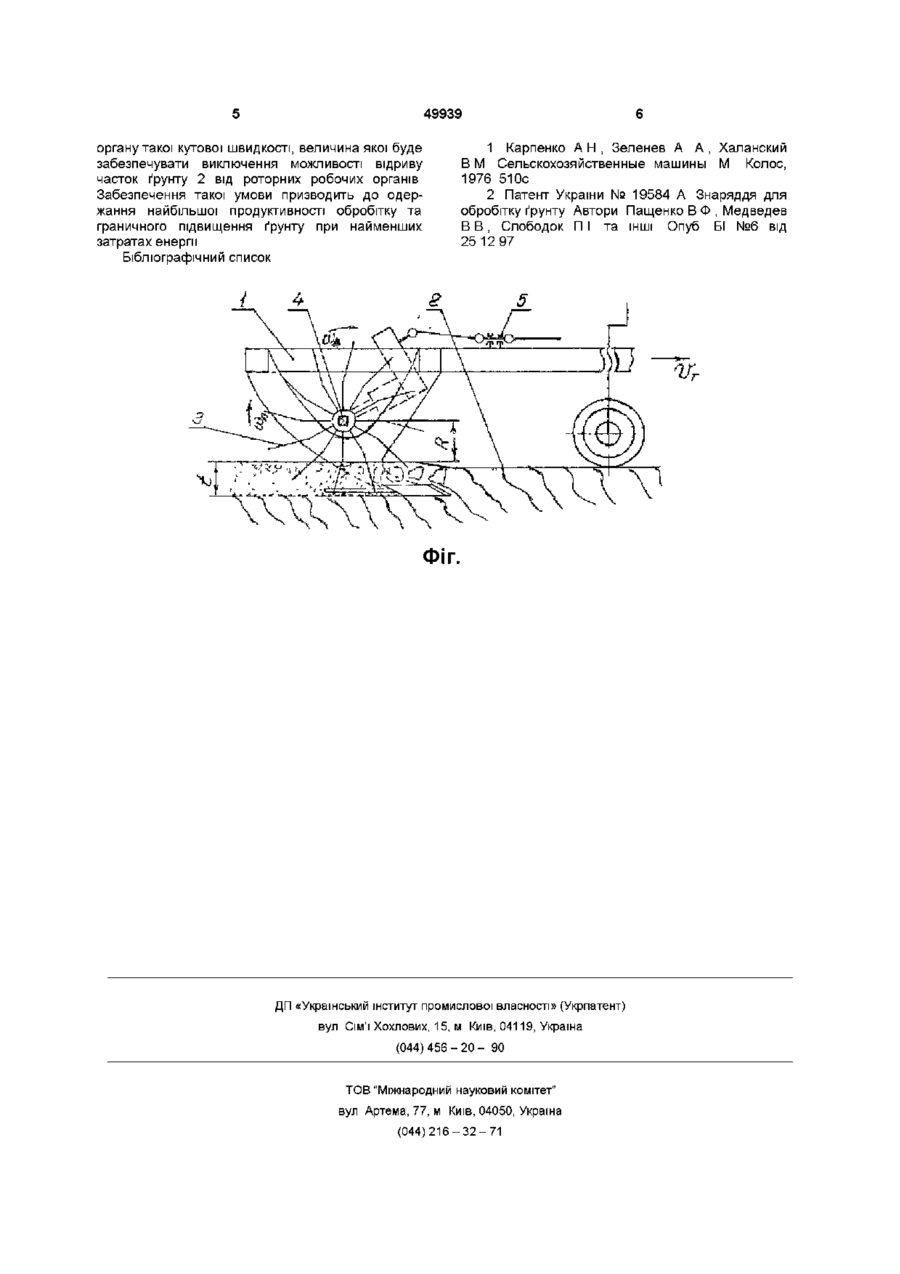
1 Спосіб обробітку ґрунту з допомогою ґрунтообробного агрегату з роторним робочим органом, який рухається по поверхні ґрунту, а його роторному робочому органу надають примусового обертового руху, який відповідає напрямку швидкості обкату по поверхні ґрунту навколо його геометричної осі, розташованої паралельно поверхні ґрунту та перпендикулярно до напрямку руху ґрунтообробного агрегату, який відрізняється тим, що роторному робочому органу ґрунтообробного агрегату надають додаткового обертового руху навколо його геометричної осі в напрямку кутової швидкості його обкату по поверхні ґрунту, при цьому величину кутової швидкості цього додаткового обертового руху визначають із співвідношення Vr 'ЇХ т -ш, R+t Винахід відноситься до сільського господарства, зокрема, до способів обробітку ґрунту під засів сільськогосподарських культур Відомий спосіб обробітку ґрунту під засів сільськогосподарських культур за допомогою стрільчатих плоскоріжучих лап, які переміщуються паралельно поверхні ґрунту [1] До недоліків цього способу треба віднести великі енергетичні витрати на обробіток ґрунту, ускладненість регулювання процесу обробітку та отримання потрібної фракційності ґрунту Найбільш близьким по технічній суті до запропонованого способу є спосіб обробітку Шп - величина кутової швидкості додаткового обертового руху роторного робочого органа ґрунтообробного агрегату, \/г - гранична лінійна швидкість периферійних частин роторного робочого органа ґрунтообробного агрегату, при якій починається відрив часток ґрунту від цього органа, R - відстань від поверхні ґрунту до геометричної осі роторного робочого органа ґрунтообробного агрегату, t - глибина обробітку ґрунту, ш п - кутова швидкість примусового обертання роторного робочого органа ґрунтообробного агрегату 2 Спосіб обробітку ґрунту по п 1, який відрізняється тим, що значення кутової швидкості примусового обертання роторного робочого органа ґрунтообробного агрегату визначають за залежністю V шп = Де VT О R швидкість транспортування ґрунтообробного агрегату по поверхні ґрунту (при проведенні обробітку) ґрунту під засів сільськогосподарських культур допомогою ґрунтообробного агрегату з роторним робочим органом, який рухається по поверхні ґрунту, а його роторному робочому органу надають примусового обертового руху, який відповідає напрямку швидкості обкату по поверхні ґрунту навколо його геометричної юсі, розташованої паралельно поверхні ґрунту та перпендикулярно до напрямку руху ґрунтообробного агрегату [2] Цей спосіб забезпечує зменшення енергозатрат (по опору руху) в 1 5 раза по відношенню до раніше приведеного способу Він со 49939 також покращує можливості регулювання фракційності ґрунту Разом з цим, він не реалізує найвищої продуктивності та не забезпечує гранично високої інтенсивності подрібнення ґрунту В основу винаходу покладена задача вдосконалення та збільшення продуктивності обробітку ґрунту та досягнення граничної інтенсивності його подрібнення Ця задача вирішується тим що роторному робочому органу ґрунтообробного агрегату надають додаткового обертового руху навколо його геометричної осі в напрямку кутової швидкості його обкату по поверхні ґрунту, при цьому величину кутової швидкості цього додаткового обертового руху визначають із співвідношення, Vr M т R+t П де Год - величина кутової швидкості додаткового обертового руху роторного робочого органі ґрунтообробного агрегату, Vr - гранична лінійна швидкість периферійних частин роторного робочого органу ґрунтообробного агрегату, при якій починається відрив часток ґрунту від цього органу, R - відстань від поверхні ґрунту до геометричної ВІСІ роторного робочого органу ґрунтообробного агрегату, t - глибина обробітку ґрунту, соп - кутова швидкість примусового обертового руху роторного робочого органу ґрунтообробного агрегату При цьому, по одному із варіантів способу значення кутової швидкості примусового обертання роторного робочого органу ґрунтообробного агрегату визначають по залежності VТ . n R де VT швидкість транспортування ґрунтообробного агрегату по поверхні ґрунту (при проведенні обробітку), На кресленні зображена схема, яка реалізує запропонований спосіб Ґрунтообробний агрегат 1, який рухається по поверхні ґрунту 2, несе на собі роторні робочі органи 3, які мають загальну вісь 4, Ця вісь 4 розміщена горизонтально до поверхні ґрунту 2 і перпендикулярно до напрямку руху ґрунтообробного агрегату, який рухається зі швидкістю VT ВІСЬ 4 розташована на відстані R від поверхні ґрунту Роторні робочі органи З заглиблюються в ґрунт на глибину t Примусовий обертовий рух роторних робочих органів має кутову швидкість соп, а додатковий обертовий рух має кутову швидкість сод При цьому відрив часток ґрунту від роторного робочого органу починається при величині граничної лінійної швидкості VT периферійних частин роторного робочого органу ґрунтообробного агрегата Примусовий та додатковий обертовий рух роторних робочих органів здійснюється від валу відбору потужності енергетичного засобу пересування (на креслені не показано) через привід 5 Спосіб реалізується слідуючим чином Ґрунтообробний агрегат 1 рухається по поверхні ґрунту 2 зі швидкістю VT При цьому вісь 4 роторного робочого органу 3 розташована паралельно поверхні ґрунту 2 і перпендикулярно напрямку руху зі швидкістю VT, Роторному робочому органу 3 надається примусовий обертовий рух в напрямку кутової швидкості його обкату по поверхні ґрунту 2 відносно геометричної осі 4 з кутовою швидкістю - Ю Складання двох п рухів поступального з ЛІНІЙНОЮ ШВИДКІСТЮ - VT та обертового з кутовою швидкістю - Юп, при умові, що роторні робочі органи 3 мають вказане розположення ВІСІ 4 на відстані R від ґрунту 2 призводить до такого руху, котрий забезпечує обробіток ґрунту Надання роторному робочому органу З додаткового обертового руху відносно його геометричної ВІСІ 4 в напрямку кутової швидкості 8 його обкату по поверхні ґрунту 2 з величиною, що визначається співвідношенням Vr Т -шп П R+t дозволяє максимально підвищити продуктивність обробітку та гранично збільшити інтенсифікацію подрібнення ґрунту 2, Це зумовлюється тим, що максимальна продуктивність та інтенсифікація вказаних процесів будуть досягненні тоді, коли лінійна швидкість периферійної частини роторного робочого органу 3 буде дорівнювати граничній ЛІНІЙНІЙ швидкості VT ТИХ же периферійних частин роторного робочого органу 3 ґрунтообробного агрегату 1 Виходячи з цього, гранична сумарна кутова швидкість роторного робочого органу 3 повинна дорівнювати Vr/(R+t) Поскільки примусова кутова швидкість роторного робочої о органу 3 рівна соп, то кутова швидкість додаткового обертового руху визначається як різниця сумарної кутової швидкості роторного робочого органу 1 примусової кутової швидкості, тобто м Vr м т П R+t Кутова швидкість ш п примусового обертового руху роторного робочого органу 3 залежить від швидкості VT транспортування ґрунтообробного агрегату 1 Величину кутової швидкості соп можна розглядати як залежність швидкості VT енергетичного засобу пересування після його втрат енергії на буксування та відстані R від поверхні ґрунту 2 до геометричної ВІСІ 4 роторного робочого органу 3, яка має слідуючий вигляд V_ R Таким чином, суть способу обробітку ґрунту полягає в тому, щоб надати роторному робочому 49939 органу такої кутової швидкості, величина якої буде забезпечувати виключення можливості відриву часток ґрунту 2 від роторних робочих органів Забезпечення такої умови призводить до одержання найбільшої продуктивності обробітку та граничного підвищення ґрунту при найменших затратах енергії Бібліографічний список 1 Карпенко А Н , Зеленев А А , Халанский В М Сельскохозяйственные машины М Колос, 1976 510с 2 Патент України № 19584 А Знаряддя для обробітку ґрунту Автори Пащенко В Ф , Медведев В В, Слободок ПІ та 25 12 97 ФІГ. ДП «Український інститут промислової власності» (Укрпатент) вул Сім'ї Хохлових, 15, м Київ, 04119, Україна ( 0 4 4 ) 4 5 6 - 2 0 - 90 ТОВ "Міжнародний науковий комітет" вул Артема, 77, м Київ, 04050, Україна (044)216-32-71 ІНШІ Опуб БІ №6 від
ДивитисяДодаткова інформація
Назва патенту англійськоюSoil cultivation method
Автори англійськоюNechuiviter Leonid Ivanovych, Terniuk Mykola Emanuilovych, Nechuiviter Volodymyr Leonidovych, Dmytruk Ivan Andriiovych
Назва патенту російськоюСпособ обработки почвы
Автори російськоюНечуйвитер Леонид Иванович, Тернюк Николай Эммануилович, Нечуйвитер Владимир Леонидович, Дмитрук Иван Андреевич
МПК / Мітки
МПК: A01B 49/02
Мітки: спосіб, обробітку, грунту
Код посилання
<a href="https://ua.patents.su/3-49939-sposib-obrobitku-gruntu.html" target="_blank" rel="follow" title="База патентів України">Спосіб обробітку грунту</a>
Спосіб обробітку грунту
Номер патенту: 20258
Опубліковано: 15.07.1997
Автори: Рогатинський Василь Іванович, Радзієвський Леонід Леонідович, Гершкул Іван Павлович, Шмат Сергій Іванович, Іванько Іван Павлович, Черячукін Микола Іванович
МПК: A01B 79/00
Мітки: спосіб, обробітку, грунту
Формула / Реферат:
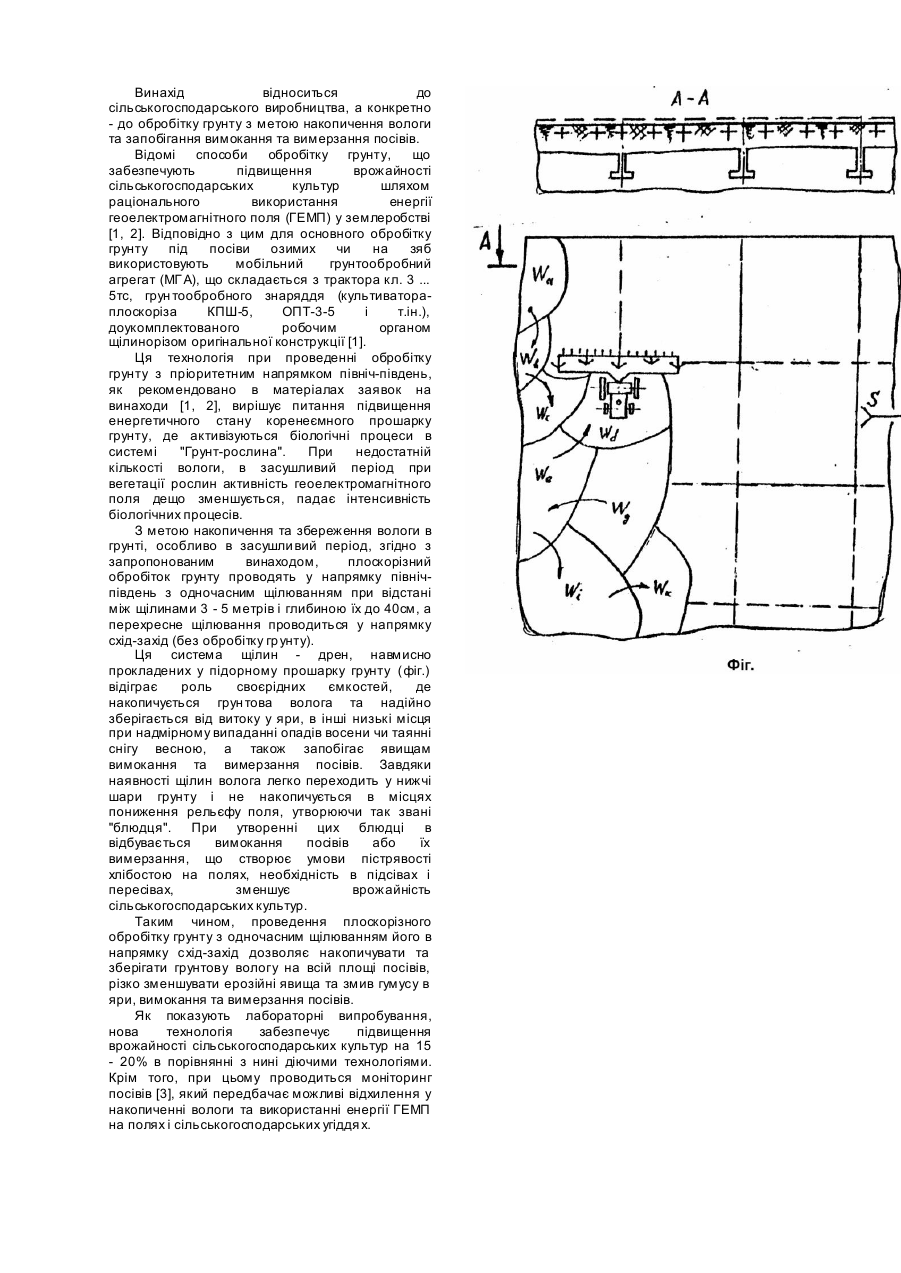
1. Спосіб обробітку грунту, якнії включає плоскорізний обробіток з одночасним щілюванням, який відрізняється тим, що основний обробіток грунту виконують плоскорізним ґрунтообробним знаряддям сумісно з агроприйомом глибокого щілювання у напрямку північ-південь і ортогонального щілювання у напрямку схід-захід при розташуванні щілин одна від одної на відстані 3-5 м. 2. Спосіб обробітку грунту по п, 1, передбачає проведення догляду за...
Пристрій для очистки поверхні від льоду, ущільненого снігу та/або обробітку грунту
Номер патенту: 1305
Опубліковано: 15.07.2002
Автор: Погорельський Станіслав Володимирович
МПК: A01B 21/08
Мітки: обробітку, поверхні, снігу, грунту, ущільненого, пристрій, льоду, очистки
Формула / Реферат:
Пристрій для очистки поверхні від льоду, ущільненого снігу та/або обробітку грунту, який містить робочі органи, встановлені з можливістю обертання навколо геометричних осей робочих органів, розташованих з нахилом та переважно поперек руху робочих органів, який відрізняється тим, що робочі органи розташовані зі зміщенням один відносно іншого поперек руху та вздовж напрямку руху.
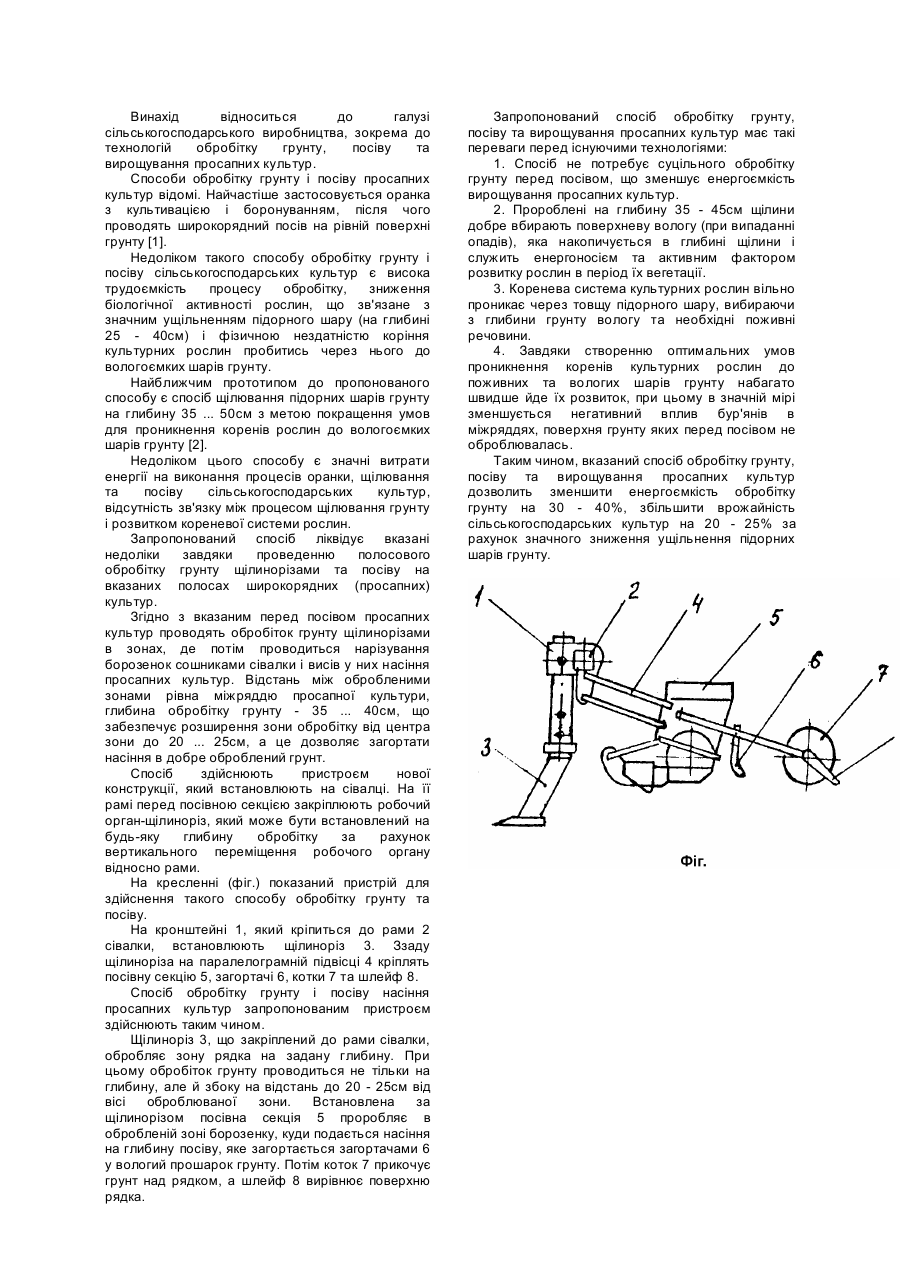
Спосіб обробітку грунту і посіву насіння просапних культур та пристрій для його здійснення
Номер патенту: 24422
Опубліковано: 17.07.1998
Автори: Дунаєвський Олег Васильович, Іванько Іван Павлович, Шило Валерія Сергіївна, Сало Лариса Віталіївна, Шмат Сергій Іванович
МПК: A01B 49/04
Мітки: обробітку, просапних, культур, здійснення, грунту, посіву, насіння, пристрій, спосіб
Формула / Реферат:
1. Спосіб обробітку грунту і посіву насіння просапних культур, який включає передпосівний обробіток грунту щілинорізами, який відрізняється тим, що посів насіння проводять у зоні завчасно пророблених на глибину 35 - 45см щілин.2. Пристрій для здійснення способу обробітку грунту і посіву за п.1, який включає робочий орган - щілиноріз, який відрізняється тим, що на рамі сівалки перед посівними секціями встановлюють щілинорізи з відстанню...
Спосіб передпосівного обробітку грунту під цикорій кореневий
Номер патенту: 41525
Опубліковано: 17.09.2001
Автори: Курило Василь Леонідович, Зуєв Микола Михайлович, Ткач Олег Васильович, Миколюк Юрій Васильович, Борисюк Володимир Олексійович
МПК: A01B 79/00
Мітки: кореневий, обробітку, передпосівного, грунту, спосіб, цикорій
Формула / Реферат:
Спосіб передпосівного обробітку ґрунту під цикорій кореневий, що включає вирівнювання, розпушування на глибину, що перевищує глибину загортання насіння і передпосівне коткування поверхні ґрунту, який відрізняється тим, що обробіток здійснюється одним агрегатом, причому розпушування проводиться на глибину, встановлену за співвідношенням:hг=(2,0-3,0.) hз.н,де: hг - глибина розпушування ґрунту, мм;hз.н - глибина загортання...
Робочий орган для міжрядного обробітку грунту і боротьби з бур’янами
Номер патенту: 38568
Опубліковано: 15.05.2001
Автори: Курило Василь Леонідович, Зуев Микола Михайлович, Радейко Богдан Михайлович, Гументик Михайло Ярославович, Пастух Анатолій Андрійович
МПК: A01B 19/00
Мітки: грунту, бур'янами, міжрядного, боротьби, орган, обробітку, робочий
Формула / Реферат:
(21) 2000074502 Дата прийняття(54) (57) рішення 05.02.2001 р.Робочий орган для міжрядного обробітку грунту і боротьби з бур'янами, включає розпушувальні зуби, який відрізняється тим, що робочий...
Попередній патент: Лікарський засіб на основі офлоксацину і спосіб його виробництва
Наступний патент: Знаряддя для обробітку грунту
Випадковий патент: 2-аміно-4-метил-9-(2-метоксифеніл)-7-оксо-3-ціано-6,7,8,9-тетрагідропіридо[3',2':4,5]тієно[3,2-b]піридин