Спосіб виходу на зв’язок з космічними апаратами із невідомими параметрами орбіти
Номер патенту: 51695
Опубліковано: 26.07.2010
Автори: Ожінський Віктор Васильович, Парфенюк Василь Григорович
Формула / Реферат
Спосіб виходу на зв'язок з космічними апаратами із невідомими параметрами, який полягає в тому, що перед проведенням сеансу зв'язку з наземною станцією керування дані з навігаційного приймача обробляються бортовою цифровою обчислювальною машиною, кодуються у пакет спецінформації з маркером навігаційних вимірів та передаються до бортового спеціального комплексу, який ненаправленою антеною передає дані на наземні станції прийому наукової інформації, та далі каналами зв'язку (мережею Інтернет) інформація потрапляє до наземного комплексу керування.
Текст
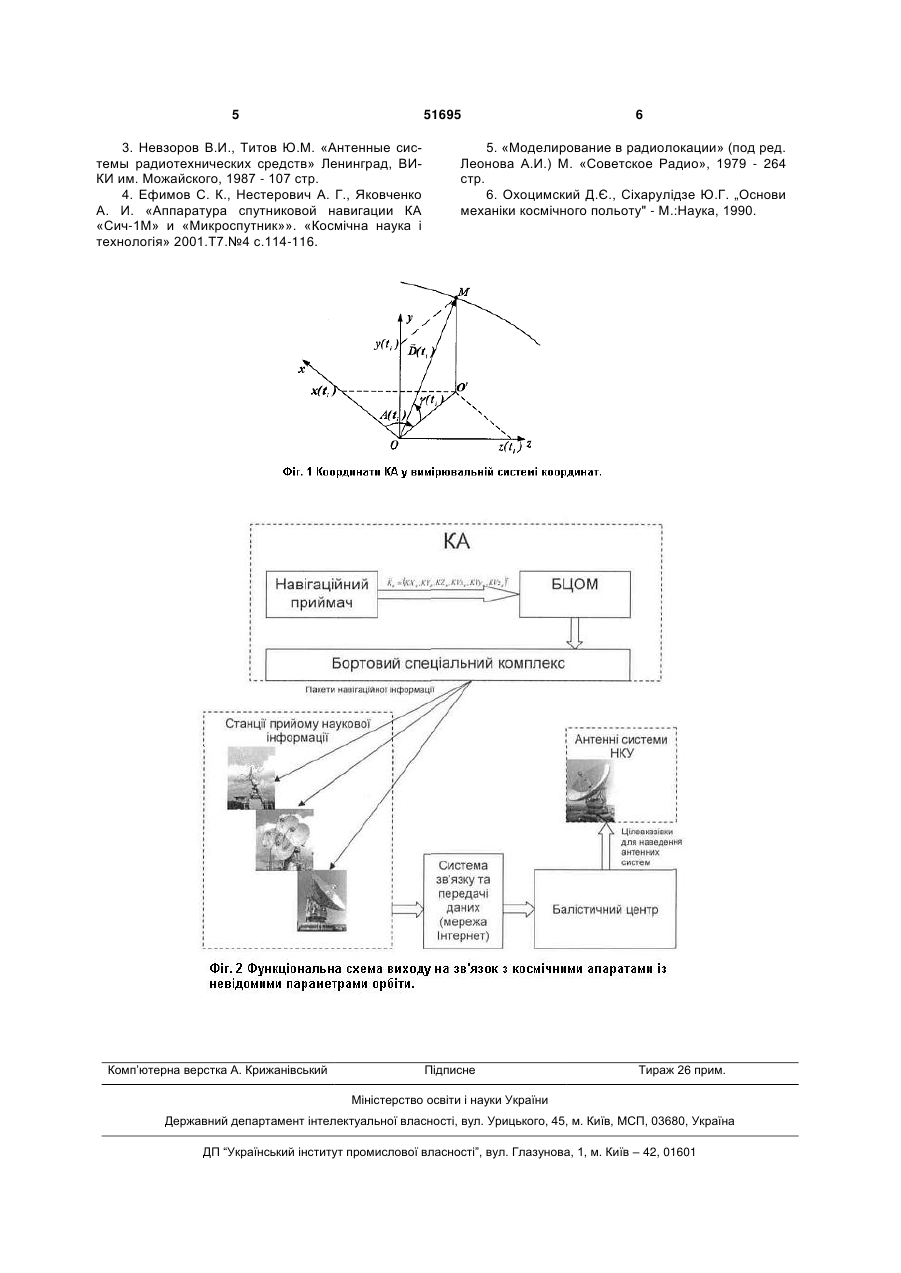
Спосіб виходу на зв'язок з космічними апаратами із невідомими параметрами, який полягає в тому, що перед проведенням сеансу зв'язку з на 3 51695 по осі обертання Землі, вісь OY доповнює систему до правої. Бортова цифрова обчислювальна машина обробляє інформацію, формує кадри наукової інформації, та періодично, через інтервали які обчисляються при розробці космічної системи і обумовлені конструкцією космічного апарата, його енергобалансом, параметрами орбіти видає до передавача спеціальної апаратури. Існує два варіанти застосування запропонованого способу. Перший передбачає використання існуючих світових мереж прийому, обробки зберігання наукової інформації(наприклад GIS - геоінформаційні системи), коли приймальні станції системи розміщують прийняту інформацію на загальних серверах з вільним доступом. В цьому випадку час роботи бортового передавача можливо не прив'язувати до зон радіо видимості радіотехнічних систем НКК. Перевагою такого варіанту є можливість завчасного визначення начальних умов руху та розрахунку цілевказівок для наземних засобів за стандартним циклом балістико навігаційного забезпечення КА. Недоліком є відкритість навігаційної інформації. Другий варіант передбачає використання існуючої вітчизняної мережі приймальних станцій. В цьому випадку прийняті навігаційні дані системою зв'язку та передачі інформації автоматично передаються до НКК. Зрозуміло, що приймальні станції мають бути територіальне рознесені із засобами НКК і підвищені вимоги ставляться до продуктивності наземних обчислювальних засобів. При невеликому рознесенні станцій час на розрахунок буде невеликим і можливо скористатись наступним методом: дані АСН, що надходять з борту КА у Гринвіцькій системі координат xr(ti), yr(ti), zr(ti) у вимірювальній системі координат пункту прийому будуть [4]: x( ti ) xГ ( ti ) y( ti ) AВГ yГ ( ti ) z( ti ) zГ ( ti ) де АВГ - матриця переходу від Гринвіцької до вимірювальної системи координат. Направляючі косинуси матриці обчислюються через величину кутів і (довгота та широта пункту прийому), тому матриця АВГ має вигляд: cos sin sin sin cos AВГ cos cos sin sin cos cos sin 0 , Нахильна відстань до КА обчислюється, як R( ti ) x 2 ( ti ) y 2 ( ti ) z( ti ) . Напрям на КА, що рухається в зоні радіоогляду пункту прийому визначається двома кутами (Фіг.1): азимутом (ti), обчисленим у площині місцевого горизонту пункту від напряму на північ (позитивного напряму осі Ох) до проекції вектору на хильної відстані R( ti ) на площину місцевого горизонту, кутом місця (ti) між вектором нахильної відстані та його проекцією на площину місцевого горизонту. З геометричних співвідношень виходить: 4 ( ti ) arcsin ( ti ) z( ti ) x 2 ( ti ) z2 ( tГ ) arcsin ; y( ti ) ; R( ti ) де x(ti), y(ti), z(ti) - проекції вектору нахильної відстані R( ti ) на осі вимірювальної системи координат (або координати КА в ВСК). Далі за поточним значенням координат КА і заданій моделі руху проводиться розрахунок місцезнаходження КА у вимірювальній системі координат на момент часу ti+1 (момент наступного розрахунку координат за даними АСН). Наступна робота здійснюється, як і у пристрої програмного керування, шляхом інтерполяції: лінійної у разі роботи з КА, рух яких відносно пункту прийому характеризується відносно малими кутовими швидкостями, або при малому значенні t=ti+1-ti; нелінійного - при великих кутових швидкостях, великому значенні t. У першому випадку частину функції (t) між двома сусідніми точками замінюють відрізком лінійної функції, у другому поліномом другого або третього порядку. Як приклад можна привести використану в універсальних пристроях програмного керування інтерполяцією за кубічним законом [4]: (t)=a+bt+ct2+dt3 де (t) - поточний кут повороту антени; a= нач - початкове значення кута; b нач - значення кутової швидкості на початку інтервалу інтерполяції. (3 t 3 t) c ; 2 t t 2 ) (2 t d ; t3 де - різниця кутів на початку та у кінці інтервалу інтерполяції. (ti) та поворотного пристрою, що відпрацьовує кути керування антенними системами. Пропонований спосіб має наступні технічні переваги: - забезпечується високоточне керування антенними системами по фактичній інформації про місцезнаходження КА; - відсутня необхідність створення додаткових засобів локації та пошуку КА при виведенні на не розрахункову орбіту; - можливість використання як непрямого джерела отримання телеметричної інформації; - легка реалізація з використанням сучасної обчислювальної техніки та елементної бази. Перелік посилань 1. Загорулько А.Н. Особенности программных способов управления космическими аппаратами при однопунктной технологии. // Моделювання та інформаційні технології: Збірник, наукових, праць. X.: НАНУ, Інститут проблем моделювання в енергетиці імені Г.Є. Пухова. -2005- Вип. 32. - С.80-87 2. Калашников Н.И. "Системы связи через ИСЗ", М. «Связь», 1969 - 384 стр. 5 51695 3. Невзоров В.И., Титов Ю.М. «Антенные системы радиотехнических средств» Ленинград, ВИКИ им. Можайского, 1987 - 107 стр. 4. Ефимов С. К., Нестерович А. Г., Яковченко А. И. «Аппаратура спутниковой навигации КА «Сич-1М» и «Микроспутник»». «Космічна наука і технологія» 2001.Т7.№4 с.114-116. Комп’ютерна верстка А. Крижанівський 6 5. «Моделирование в радиолокации» (под ред. Леонова А.И.) М. «Советское Радио», 1979 - 264 стр. 6. Охоцимский Д.Є., Сіхарулідзе Ю.Г. „Основи механіки космічного польоту" - М.:Наука, 1990. Підписне Тираж 26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюRadio contact method for radio contact to space vehicles with unknown orbit parameters
Автори англійськоюParfeniuk Viktor Hryhorovych, Ozhinskyi Viktor Vasyliovych
Назва патенту російськоюСпособ выхода на связь с космическими аппаратами с неизвестными параметрами орбиты
Автори російськоюПарфенюк Василий Григорьевич, Ожинский Виктор Васильевич
МПК / Мітки
МПК: G05B 17/00
Мітки: космічними, виходу, апаратами, невідомими, параметрами, зв'язок, спосіб, орбіти
Код посилання
<a href="https://ua.patents.su/3-51695-sposib-vikhodu-na-zvyazok-z-kosmichnimi-aparatami-iz-nevidomimi-parametrami-orbiti.html" target="_blank" rel="follow" title="База патентів України">Спосіб виходу на зв’язок з космічними апаратами із невідомими параметрами орбіти</a>
Координатно-часовий спосіб керування космічними апаратами
Номер патенту: 19490
Опубліковано: 15.12.2006
Автори: Загорулько Олександр Миколайович, Моргун Олександр Андрійович, Богом'я Володимир Іванович
МПК: B64G 1/24
Мітки: керування, апаратами, космічними, спосіб, координатно-часовий
Формула / Реферат:
Координатно-часовий спосіб керування космічними апаратами, який полягає в тому, що програма роботи бортових систем КА (космічного апарата), яка записується в бортовий запам'ятовуючий пристрій для подальшого відпрацювання, являє собою параметричну (змістовну) частину та часову і просторову (координатну) складові, які забезпечують виконання операцій керування як в заданий час, так і в заданій точці простору, яка відрізняється тим, що поряд з...
Спосіб керування космічними апаратами.
Номер патенту: 32203
Опубліковано: 12.05.2008
Автори: Загорулько Олександр Миколайович, Ожінський Віктор Васильович, Богом'я Володимир Іванович
МПК: G05B 17/00
Мітки: апаратами, спосіб, керування, космічними
Формула / Реферат:
Спосіб керування космічними апаратами (КА), який полягає в тому, що в процесі експлуатації КА процесор з використанням математичного апарату нечіткої логіки накопичує досвід про типові відмови, відмови, викликані випрацюванням ресурсу апаратури, "плаваючі" несправності, коригує алгоритми функціонування БЦОМ, перешкоджаючи переходу в аварійні режими та режими обмеженого функціонування, забезпечуючи зберігання корисної інформації,...
Спосіб відхилення головного максимуму діаграми спрямованості рупорних випромінювачів антенних систем наземного автоматизованого комплексу управління космічними апаратами
Номер патенту: 44896
Опубліковано: 26.10.2009
Автори: Рачинський Костянтин Олександрович, Залужний Руслан Миколайович, Пашков Дмитро Павлович, Ломоносов Сергій Євгенійович
МПК: H04B 7/00
Мітки: антенних, максимуму, спрямованості, діаграми, випромінювачів, космічними, рупорних, відхілення, управління, апаратами, головного, автоматизованого, наземного, комплексу, систем, спосіб
Формула / Реферат:
Спосіб відхилення головного максимуму діаграми спрямованості рупорних випромінювачів антенних систем наземного автоматизованого комплексу управління космічними апаратами, який полягає в застосуванні додаткового антенного пристрою - концентричних фрагментів зон Френеля, який в сукупності з антеною формує поле (відповідний амплітудний та фазовий розподіл) в розхилі рупора таким чином, що головний максимум діаграми спрямованості в дальній зоні...
Система керування параметрами організації
Номер патенту: 35528
Опубліковано: 25.09.2008
Автори: Баришев Юрій Володимирович, Дудатьєв Андрій Веніамінович
МПК: G05B 13/00
Мітки: параметрами, керування, організації, система
Формула / Реферат:
Система керування параметрами організації, що містить об'єкт керування, виходи якого з'єднані з блоком отримування чітких вхідних даних та блоком визначення експертних знань, виходи яких з'єднані з блоком перетворення, виходи якого з'єднані з блоком оцінювання стану об'єкта, блок прийняття рішення, блок виконання, яка відрізняється тим, що введено блок керування, входом якого є вихід блока прийняття рішення, блок індикації, входом якого є...
Спосіб керування технологічними параметрами турбомеханізмів
Номер патенту: 60176
Опубліковано: 15.09.2003
Автори: Федорейко Валерій Степанович, Корчемний Микола Олександрович, Рутило Микола Іванович, Клендій Петро Богданович, Понятишин Василь Зіновійович, Нестеренко Олексій Вікторович
МПК: F01D 17/00
Мітки: керування, турбомеханізмів, технологічними, параметрами, спосіб
Формула / Реферат:
Спосіб керування технологічними параметрами турбомеханізмів, що включає використання електроенергетичних параметрів (напруги, струму, частоти) і на основі їх обрахунку вироблення керуючих дій, який відрізняється тим, що для отримання реальних технологічних характеристик турбомеханізму використовують електромеханічні параметри електроприводу (електромагнітний момент та швидкість електродвигуна), які формує перетворювач частоти з векторним...
Попередній патент: Спосіб отримання даних про прозорість атмосфери
Наступний патент: Привід пристрою регулювання напруги силового трансформатора під навантаженням
Випадковий патент: Спосіб кардіохірургічної та акушерської допомоги вагітним жінкам з синдромом марфана