Привід пристрою регулювання напруги силового трансформатора під навантаженням
Номер патенту: 51696
Опубліковано: 26.07.2010
Автори: Гребеніков Віктор Володимирович, Кацалап Сергій Михайлович, Рассальський Олександр Миколайович

Формула / Реферат
Привід пристрою регулювання напруги силового трансформатора під навантаженням, що містить електродвигун з вихідним валом, привідний вал пристрою регулювання, датчик положення, систему керування приводу пристрою регулювання під навантаженням, який відрізняється тим, що як електродвигун привід містить вентильний електродвигун з постійними магнітами, вихідний вал якого безпосередньо з'єднаний із привідним валом пристрою регулювання під навантаженням, система керування приводу пристрою регулювання під навантаженням зв'язана з пристроєм дистанційного керування, виконана цифровою і містить програмовний логічний контролер, блок силової комутації обмоток вентильного двигуна з постійними магнітами, датчик кута комутації обмоток двигуна, датчик положення і швидкості вала двигуна, панель керування, панель індикації положення пристрою регулювання під навантаженням і джерело безперебійного живлення, причому вихід джерела безперебійного живлення з'єднаний з першим входом програмовного логічного контролера, другий вхід програмовного логічного контролера з'єднаний з виходом панелі керування, третій його вхід з'єднаний з виходом пристрою дистанційного керування приводом пристрою регулювання під навантаженням, четвертий його вхід з'єднаний з першим виходом блока силової комутації обмоток вентильного двигуна з постійними магнітами, перший вихід програмовного логічного контролера з'єднаний з першим входом блока силової комутації, другий його вихід з'єднаний з входом панелі індикації положення пристрою регулювання під навантаженням, третій його вихід з'єднаний з входом пристрою дистанційного керування приводом пристрою регулювання під навантаженням, другий вхід блока силової комутації з'єднаний з джерелом напруги, другий його вихід з'єднаний з обмотками вентильного двигуна з постійними магнітами, вихід датчика кута комутації з'єднаний з п'ятим входом програмовного логічного контролера і третім входом блока силової комутації, вихід датчика положення і швидкості з'єднаний з шостим входом програмовного логічного контролера і четвертим входом блока силової комутації, при цьому датчик кута комутації і датчик положення і швидкості розміщені на загальній осі з вентильним двигуном з постійними магнітами.
Текст
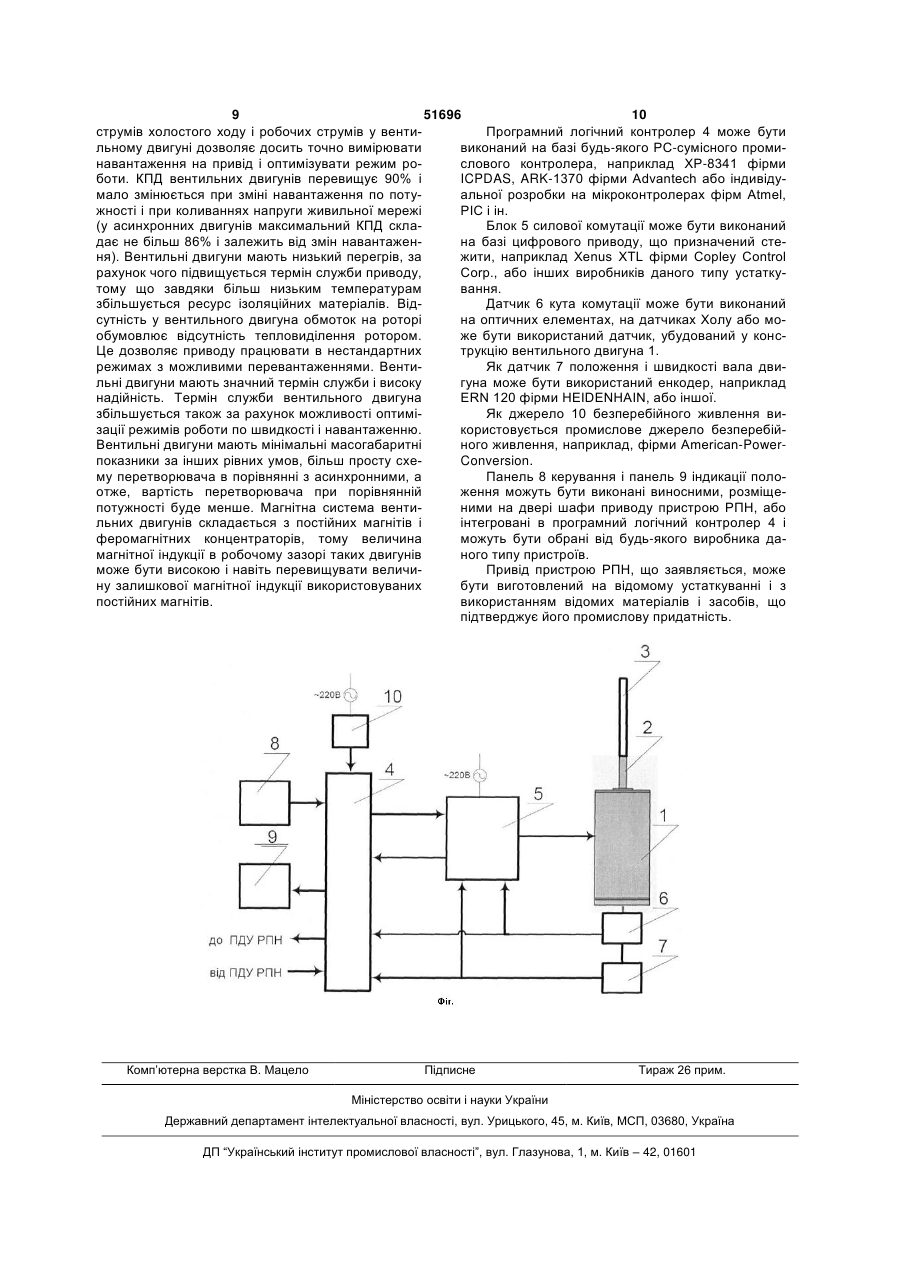
Привід пристрою регулювання напруги силового трансформатора під навантаженням, що містить електродвигун з вихідним валом, привідний вал пристрою регулювання, датчик положення, систему керування приводу пристрою регулювання під навантаженням, який відрізняється тим, що як електродвигун привід містить вентильний електродвигун з постійними магнітами, вихідний вал якого безпосередньо з'єднаний із привідним валом пристрою регулювання під навантаженням, система керування приводу пристрою регулювання під навантаженням зв'язана з пристроєм дистанційного керування, виконана цифровою і містить програмовний логічний контролер, блок силової комутації обмоток вентильного двигуна з постійними магнітами, датчик кута комутації обмоток двигуна, датчик положення і швидкості вала двигуна, панель керування, панель індикації положення пристрою регулювання під навантаженням і U 2 51696 1 3 51696 4 виконана з хвостовиком і зубом. Вихідний вал вилогічного контролера, другий вхід програмного конаний з пазами, зміщеними уздовж його осі. Вісь логічного контролера з'єднаний з виходом панелі механізму розчіплювання жорстко закріплена на керування, третій його вхід з'єднаний з виходом втулці і веденому колесі. Засувки вільно розміщені пристрою дистанційного керування приводом прина осі механізму розчіплювання і зв'язані його строю регулювання під навантаженням, четвертий пружиною. Зуби засувок введені в пази вихідного його вхід з'єднаний з першим виходом блока силовала, а кулачок механізму блокування жорстко вої комутації обмоток вентильного двигуна з посзакріплений на його осі, вільно встановленої в тійними магнітами, перший вихід програмного лонерухомому стакані. Кулачок установлений так, що гічного контролера з'єднаний з першим входом його зуб розміщений у пазу стакана, а кожен його блока силової комутації, другий його вихід з'єднавиступ має можливість взаємодії в кінцевих полоний з входом панелі індикації положення пристрою женнях із хвостовиком відповідної засувки в залерегулювання під навантаженням, третій його вихід жності від напрямку обертання. з'єднаний з входом пристрою дистанційного керуВідомий привід характеризується низькою ексвання приводом пристрою регулювання під наванплуатаційною надійністю, високою трудомісткістю таженням, другий вхід блока силової комутації при виготовленні і низкою точністю позиціювання з'єднаний з джерелом напруги, другий його вихід при регулюванні під навантаженням. з'єднаний з обмотками вентильного двигуна з посЦе пояснюється тим, що привід являє собою тійними магнітами, вихід датчика кута комутації складний електромеханічний пристрій з безліччю з'єднаний з п'ятим входом програмного логічного взаємодіючих між собою деталей, оснащених праконтролера і третім входом блока силової комутапорцями, втулками, пружинами, засувками, хвосції, вихід датчика положення і швидкості з'єднаний товиками, зубами. У процесі роботи всі ці елеменз шостим входом програмного логічного контролети швидко зношуються і знижується точність ра і четвертим входом блока силової комутації, позиціювання при регулюванні напруги силового при цьому датчик кута комутації і датчик положентрансформатора під навантаженням. Наявність ня і швидкості розміщені на загальній осі з вентивеликої кількості взаємодіючих між собою деталей льним двигуном з постійними магнітами. вимагає дуже високої точності при виготовленні, Причинно-наслідковий зв'язок між сукупністю що пов'язане з великими трудовитратами і висосуттєвих ознак корисної моделі і технічним резулькою трудомісткістю при виготовленні такого притатом, що досягається, полягає в наступному. вода. Найменше відхилення в розмірах прапорців, Вентильний електродвигун з постійними магнівтулок, пружин, засувок, хвостовика, зубів приведе тами забезпечує підвищення експлуатаційної надо зниження надійності приводу, нестабільній його дійності приводу пристрою РПН і підвищення точроботі, що, у свою чергу, приведе до порушення ності позиціювання при регулюванні, тому що в роботи силового трансформатора. ньому відсутні взаємодіючі між собою деталі, споВ основу корисної моделі поставлена задача ряджені прапорцями, втулками, пружинами, засувудосконалити привід пристрою РПН шляхом увеками, хвостовиками, зубами. Вентильний електродення нових конструктивних елементів, нових зв'ядвигун з постійними магнітами дозволяє визначати зків між конструктивними елементами, нового вимомент навантаження на валу пристрою РПН, конання конструктивних елементів, що тому що величина електромагнітного моменту, що забезпечить підвищення його експлуатаційної нарозвивається, має лінійну залежність від струму дійності, зниження трудомісткості при виготовленнавантаження. Це дає можливість здійснювати ні, підвищення точності позиціювання при регулюмоніторинг роботи пристрою РПН, що сприяє підванні. вищенню точності позиціювання при регулюванні. Поставлена задача вирішується тим, що в Мінімальне значення струмів холостого ходу і роприводі пристрою регулювання напруги силового бочих струмів вентильного електродвигуна з пострансформатора під навантаженням, що включає тійними магнітами дозволяє досить точно вимірюелектродвигун з вихідним валом, привідний вал вати навантаження на привід і оптимізувати режим пристрою регулювання, датчик положення, систероботи. У вентильного електродвигуна з постійниму керування приводу пристрою регулювання під ми магнітами відсутні обмотки на роторі, тому ненавантаженням, відповідно до технічного рішення, має тепловиділення від ротора. Це обумовлює новим є те, що як електродвигун привід містить збільшення терміну служби приводу, тому що збівентильний електродвигун з постійними магнітами, льшується ресурс ізоляційних матеріалів. Привід, вихідний вал якого безпосередньо з'єднаний із що містить вентильний електродвигун з постійнипривідним валом пристрою регулювання під навами магнітами, здатний працювати в нестандартних нтаженням (РПН), система керування приводу режимах з можливими перевантаженнями. пристрою регулювання під навантаженням зв'язаПрограмний логічний контролер призначений на з пристроєм дистанційного керування (ПДК), для контролю поточного положення пристрою виконана цифровою і містить програмний логічний РПН. Блок силової комутації відпрацьовує заданий контролер, блок силової комутації обмоток вентирежим переключення пристрою РПН по положенльного двигуна з постійними магнітами, датчик ню, швидкості переміщення і току. Датчик кута кокута комутації обмоток двигуна, датчик положення мутації призначений для виміру положення ротора і швидкості вала двигуна, панель керування, павентильного двигуна щодо статора і визначає кут нель індикації положення пристрою регулювання комутації фазних обмоток вентильного двигуна. під навантаженням і джерела безперебійного живДатчик положення і швидкості призначений для лення, причому вихід джерела безперебійного виміру кутової швидкості обертання вала вентильживлення з'єднаний з першим входом програмного ного двигуна, визначення його положення і підра 5 51696 6 хунку кількості оборотів вала двигуна і забезпечує керування на другий вхід програмного логічного високу точність позиціювання при переключенні. контролера в ручному режимі подаються команди, Джерело безперебійного живлення забезпечує аналогічні командам від пристрою дистанційного безперебійну роботу приводу. Панель індикації керування приводом пристрою РПН. положення відображає дані про поточне положенні Приводом, що заявляється, і який містить як пристрою РПН. Панель керування призначена для електродвигун вентильний двигун з постійними подачі команд у режимі автономного керування. магнітами, вихідний вал якого безпосередньо з'єдПісля підключення першого входу програмного наний із привідним валом пристрою РПН, у якому логічного контролера і другого входу блока силосистема керування приводу пристрою РПН викової комутації до джерел живлення від пристрою нана цифровою і містить програмний логічний кондистанційного керування приводом пристрою РПН тролер, блок силової комутації обмоток вентильна третій вхід програмного логічного контролера ного двигуна з постійними магнітами, датчик кута надходить команда виконати переключення n+1 комутації обмоток двигуна, датчик положення і або n-1, де n - поточне положення пристрою РПН, швидкості вала двигуна, панель керування, панель тобто перейти в наступне його положення або поіндикації положення пристрою РПН і джерело безвернутися в попереднє. Програмний логічний конперебійного живлення, забезпечується підвищентролер контролює поточне положення пристрою ня його експлуатаційної надійності, зниження труРПН і порівнює його з отриманою командою. Якщо домісткості при виготовленні, підвищення точності пристрій РПН не знаходиться в крайньому полопозиціювання при регулюванні, тому що відсутні женні, то з першого виходу програмного логічного механічні деталі. При виготовленні такого приводу контролера на перший вхід блока силової комутаістотно зменшуються витрати часу і знижується ції надходить команда виконати переключення. складність технологічних операцій. Знос складових Блок силової комутації відпрацьовує заданий рейого блоків і датчиків значно нижче, а точність вижим переключення пристрою РПН і на його другоконання команд суттєво вище. му виході збуджуються фазні струми для керуванПривід пристрою регулювання напруги силоня обертанням вала вентильного двигуна. З вого трансформатора під навантаженням пояснювиходу датчика кута комутації на третій вхід блока ється кресленням, на якому приведена блок-схема силової комутації надходить сигнал зворотного приводу, що заявляється. зв'язку для синхронізації моменту переключення Привід пристрою регулювання напруги силофазних струмів вентильного двигуна. Одночасно з вого трансформатора під навантаженням містить виходу датчика положення і швидкості на четвервентильний електродвигун 1 з постійними магнітатий вхід блока силової комутації надходить сигнал ми, вихідний вал 2 якого безпосередньо з'єднаний про положення і швидкість вала вентильного двиіз привідним валом 3 пристрої РПН (на кресленні гуна. У блоці силової комутації, що містить контур не показаний). Привід містить також програмний положення, контур швидкості і контур струму, здійлогічний контролер 4, блок 5 силової комутації снюється пропорційно-інтегральне регулювання, обмоток вентильного двигуна 1 з постійними магзабезпечуючи задане переміщення за часом і понітами, датчик 6 кута комутації обмоток вентильноложенням, що, при необхідності, у процесі експлуго двигуна 1, датчик 7 положення і швидкості вала атації може бути змінене в широкому діапазоні. вентильного двигуна 1, панель 8 керування, паОдночасно з виходу датчика кута комутації надхонель 9 індикації положення пристрою РПН, джередить сигнал на п'ятий вхід програмного логічного ло 10 безперебійного живлення. Керування привоконтролера, а з виходу датчика положення і швиддом здійснюється в автономному режимі за кості на шостий вхід програмного логічного контдопомогою панелі керування 8. ролера. Програмний логічний контролер здійснює Вихід джерела 10 безперебійного живлення по цих сигналах арифметично-логічний контроль з'єднаний з першим входом програмного логічного позиціювання (переміщення) пристрою РПН і за контролера 4, другий вхід програмного логічного результатами контролю, при необхідності, виробконтролера 4 з'єднаний з виходом панелі 8 керуляє зі свого першого виходу на перший вхід блока вання, третій його вхід з'єднаний з виходом присилової комутації коригувальні команди. З першого строю дистанційного керування приводом привиходу блока силової комутації на четвертий вхід строю РПН, четвертий його вхід з'єднаний з програмного логічного контролера надходять сигпершим виходом блока 5 силової комутації обмонали про стан режиму переключення пристрою ток вентильного двигуна 1 з постійними магнітами, РПН, зокрема про величину струму, про поточне п'ятий його вхід з'єднаний з виходом датчика 6 положення пристрою РПН, про те, чи йде переккута комутації, шостий його вхід з'єднаний з вихолючення в даний момент. З третього виходу продом датчика 7 положення і швидкості, перший виграмного логічного контролера на вхід пристрою хід програмного логічного контролера 4 з'єднаний дистанційного керування приводом пристрою РПН з першим входом блока 5 силової комутації, друнадходять усі необхідні для керування сигнали, що гий його вихід з'єднаний із входом панелі 9 індикаможуть бути розширені до будь-якого цифрового ції положення пристрою РПН, третій його вихід стандарту, у тому числі і для систем моніторингу. з'єднаний з входом пристрою дистанційного керуЗ другого виходу програмного логічного контролевання приводом пристрою РПН, другий вхід блока ра надходить сигнал про поточне положення при5 силової комутації з'єднаний з джерелом напруги, строю РПН на вхід панелі індикації положення. третій його вхід з'єднаний з виходом датчика 6 Програмний логічний контролер зберігає відомості кута комутації, четвертий його вхід з'єднаний з про поточне положення пристрою РПН у флешвиходом датчика 7 положення і швидкості, другий пам'яті при зникненні живлення. З виходу панелі його вихід з'єднаний з обмотками вентильного 7 51696 8 двигуна 1 з постійними магнітами, при цьому датвиходу панелі 8 керування на другий вхід програчик 6 кута комутації і датчик 7 положення і швидмного логічного контролера 4 у ручному режимі кості розміщені на загальній осі з вентильним двиподаються команди, аналогічні командам від пригуном 1 з постійними магнітами. строю дистанційного керування приводом приПривід пристрою регулювання напруги силострою РПН. вого трансформатора під навантаженням працює Як видно з вищевикладеного, у приводі притаким чином. строю регулювання напруги силового трансфорПісля підключення першого входу програмного матора під навантаженням, що заявляється, залогічного контролера 4 до джерела 10 безперебійбезпечується підвищення експлуатаційної ного живлення і другого входу блока 5 силової надійності, зниження трудомісткості при виготовкомутації до джерела напруги від пристрою дисталенні, підвищення точності позиціювання при ренційного керування приводом пристрою РПН на гулюванні, тому що замість механічних деталей третій вхід програмного логічного контролера 4 використовуються програмний логічний контролер надходить команда виконати переключення n+1 4, призначений для прийому керуючих сигналів від або n-1, де n - поточне положення пристрою РПН, пристрою дистанційного керування приводом притобто перейти в наступне його положення або построю РПН, контролю поточного положення привернутися в попереднє. Програмний логічний констрою РПН, обробки і коректування стану перектролер 4 контролює поточне положення пристрою лючення і передачі сигналів про положення, стан і РПН і порівнює його з отриманою командою. Якщо режим приводу у пристрій дистанційного керуванпристрій РПН не знаходиться в крайньому полоня приводом пристрою РПН, блок 5 силової комуженні, то з першого виходу програмного логічного тації, що відпрацьовує заданий режим переклюконтролера 4 на перший вхід блока 5 силової кочення пристрою РПН по положенню, швидкості мутації надходить команда виконати переключенпереміщення і току і контролюється програмним ня. Блок 5 силової комутації відпрацьовує заданий логічним контролером 4, а також датчик 6 кута режим переключення пристрою РПН і на його друкомутації, призначений для виміру положення рогому виході збуджуються фазні струми для керутора вентильного двигуна 1 щодо статора і визнавання обертанням вала вентильного двигуна 1. З чення кута комутації фазних обмоток вентильного виходу датчика 6 кута комутації на третій вхід блодвигуна 1, датчик 7 положення і швидкості вала ка 5 силової комутації надходить сигнал зворотнодвигуна, призначений для виміру кутової швидкосго зв'язку для синхронізації моменту переключення ті обертання вала вентильного двигуна 1, визнафазних струмів вентильного двигуна. Одночасно з чення його положення і підрахунку кількості оборовиходу датчика 7 положення і швидкості на четветів, що забезпечує високу точність позиціювання ртий вхід блока 5 силової комутації надходить сигпри переключенні. Використовуються також дженал про положення і швидкість вала вентильного рело 10 безперебійного живлення, що забезпечує двигуна 1. У блоці 5 силової комутації, що містить безперебійну роботу приводу, панель 9 індикації контур положення, контур швидкості і контур струположення, що відображає дані про поточне пому, здійснюється пропорційно-інтегральне регулюложення пристрою РПН, панель 8 керування, привання, забезпечуючи задане переміщення за чазначена для подачі команд у режимі ручного керусом і положенням. Одночасно з виходу датчика 6 вання. При виготовленні такого приводу суттєво кута комутації надходить сигнал на п'ятий вхід зменшуються витрати часу і знижується складність програмного логічного контролера 4, а з виходу технологічних операцій. Знос складових його блодатчика 7 положення і швидкості на шостий вхід ків і датчиків значно нижче, а точність виконання програмного логічного контролера 4. Програмний команд суттєво вище. логічний контролер 4 здійснює по цих сигналах У приводі пристрою регулювання напруги сиарифметично-логічний контроль позиціювання лового трансформатора під навантаженням, що (переміщення) пристрою РПН і за результатами заявляється, використовується вентильний двигун контролю, при необхідності, виробляє зі свого 1 зі збудженням від постійних магнітів. В даний час першого виходу на перший вхід блока 5 силової цей тип електродвигунів є найбільш перспективкомутації коригувальні команди. З першого виходу ним із застосовуваних у регульованих приводах блока 5 силової комутації на четвертий вхід промалої і середньої потужності. До конструктивних і грамного логічного контролера 4 надходять сигнатехніко-експлуатаційних переваг таких двигунів ли про стан режиму переключення пристрою РПН, можна віднестите, що в них відсутні ковзні електзокрема про величину струму, про поточне полоричні контакти і вузли, які вимагають обслуговуженні пристрою РПН, про те, чи йде переключення вання, за рахунок чого підвищується їхній ресурс і в даний момент. З третього виходу програмного надійність у порівнянні з двигунами постійного логічного контролера 4 на вхід пристрою дистанструму або асинхронними двигунами з явно вираційного керування приводом пристрою РПН надженою обмоткою на роторі. Вентильні двигуни ходять усі необхідні для контролю переключення характеризуються великою перевантажувальною сигнали, які можуть бути розширені до будь-якого здатністю по моменту (короткочасно кратність мацифрового стандарту, у тому числі і для систем ксимального моменту дорівнює 5 і більше), а вемоніторингу. З другого виходу програмного логічличина електромагнітного моменту, що при цьому ного контролера 4 надходить сигнал про поточне розвивається, має лінійну залежність від струму положенні пристрою РПН на вхід панелі 9 індикації навантаження, а отже, по величині струму можна положення. Програмний логічний контролер 4 збевизначати момент навантаження на валу прирігає відомості про поточне положенні пристрою строю РПН і в таким чином здійснювати монітоРПН у флеш-пам'яті при зникненні живлення. З ринг роботи пристрою РПН. Мінімальне значення 9 51696 10 струмів холостого ходу і робочих струмів у вентиПрограмний логічний контролер 4 може бути льному двигуні дозволяє досить точно вимірювати виконаний на базі будь-якого PC-сумісного проминавантаження на привід і оптимізувати режим рослового контролера, наприклад ХР-8341 фірми боти. КПД вентильних двигунів перевищує 90% і ICPDAS, ARK-1370 фірми Advantech або індивідумало змінюється при зміні навантаження по потуальної розробки на мікроконтролерах фірм Atmel, жності і при коливаннях напруги живильної мережі РІС і ін. (у асинхронних двигунів максимальний КПД склаБлок 5 силової комутації може бути виконаний дає не більш 86% і залежить від змін навантаженна базі цифрового приводу, що призначений стеня). Вентильні двигуни мають низький перегрів, за жити, наприклад Xenus XTL фірми Copley Control рахунок чого підвищується термін служби приводу, Corp., або інших виробників даного типу устаткутому що завдяки більш низьким температурам вання. збільшується ресурс ізоляційних матеріалів. ВідДатчик 6 кута комутації може бути виконаний сутність у вентильного двигуна обмоток на роторі на оптичних елементах, на датчиках Холу або мообумовлює відсутність тепловиділення ротором. же бути використаний датчик, убудований у консЦе дозволяє приводу працювати в нестандартних трукцію вентильного двигуна 1. режимах з можливими перевантаженнями. ВентиЯк датчик 7 положення і швидкості вала двильні двигуни мають значний термін служби і високу гуна може бути використаний енкодер, наприклад надійність. Термін служби вентильного двигуна ERN 120 фірми HEIDENHAIN, або іншої. збільшується також за рахунок можливості оптиміЯк джерело 10 безперебійного живлення визації режимів роботи по швидкості і навантаженню. користовується промислове джерело безперебійВентильні двигуни мають мінімальні масогабаритні ного живлення, наприклад, фірми American-Powerпоказники за інших рівних умов, більш просту схеConversion. му перетворювача в порівнянні з асинхронними, а Панель 8 керування і панель 9 індикації полоотже, вартість перетворювача при порівнянній ження можуть бути виконані виносними, розміщепотужності буде менше. Магнітна система вентиними на двері шафи приводу пристрою РПН, або льних двигунів складається з постійних магнітів і інтегровані в програмний логічний контролер 4 і феромагнітних концентраторів, тому величина можуть бути обрані від будь-якого виробника дамагнітної індукції в робочому зазорі таких двигунів ного типу пристроїв. може бути високою і навіть перевищувати величиПривід пристрою РПН, що заявляється, може ну залишкової магнітної індукції використовуваних бути виготовлений на відомому устаткуванні і з постійних магнітів. використанням відомих матеріалів і засобів, що підтверджує його промислову придатність. Комп’ютерна верстка В. Мацело Підписне Тираж 26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюDrive for a device of on-load regulating power transformer
Автори англійськоюHrebenikov Viktor Volodymyrovych, Katsalap Serhii Mykhailovych, Rassalskyi Oleksandr Mykolaiovych
Назва патенту російськоюПривод усторойства регулирования напряжения силового трансформатора под нагрузкой
Автори російськоюГребеников Виктор Владимирович, Кацалап Сергей Михайлович, Рассальский Александр Николаевич
МПК / Мітки
МПК: H01H 21/00
Мітки: регулювання, трансформатора, привід, навантаженням, пристрою, напруги, силового
Код посилання
<a href="https://ua.patents.su/5-51696-privid-pristroyu-regulyuvannya-naprugi-silovogo-transformatora-pid-navantazhennyam.html" target="_blank" rel="follow" title="База патентів України">Привід пристрою регулювання напруги силового трансформатора під навантаженням</a>
Моторний привід пристрою регулювання під навантаженням силового трансформатора
Номер патенту: 45761
Опубліковано: 25.11.2009
Автори: Наній Віталій Вікторович, Хоменко Ігор Васильович
МПК: H01F 19/00, H02P 13/00
Мітки: трансформатора, навантаженням, привід, регулювання, моторний, силового, пристрою
Формула / Реферат:
Моторний привід пристрою регулювання під навантаженням силового трансформатора, що містить силовий перетворювач, пристрої електричного керування та індикації, а також корпус, який відрізняється тим, що як силовий перетворювач використовують високомоментний низькообертовий електродвигун.
Спосіб регулювання напруги силового трансформатора
Номер патенту: 27394
Опубліковано: 15.09.2000
Автори: Цієр Гаррі Ізраїлович, Бікі Меньгерт Акошович, Шафір Юрій Натанович
МПК: H02J 3/12
Мітки: напруги, спосіб, регулювання, силового, трансформатора
Текст:
...обмера) модели прототипа. Фиг. 6. Упрощенная схема испытаний (импульсного обмера) модели по изобретению. Фиг. 5, 6 служат для подтверждения достигаемого технического результата с помощью опытных данных. Обмотка трансформатора состоит из ветвей грубого регулирования: первая ветвь грубого регулирования 1 и вторая ветвь грубого регулирования 2 и ветви тонкого регулирования 3. Последняя подключена к устройству переключения 4,При...
Пристрій захисту силового трансформатора з ізольованою нейтраллю і трансформатора напруги контролю ізоляції
Номер патенту: 15736
Опубліковано: 17.07.2006
Автори: Журавльов Дмитро Володимирович, Андрієнко Олександр Миколайович, Назаров Адольф Іванович, Кошеленко Ніна Борисівна
МПК: H02H 7/04
Мітки: контролю, напруги, захисту, пристрій, силового, ізоляції, ізольованою, трансформатора, нейтраллю
Формула / Реферат:
Пристрій захисту силового трансформатора з ізольованою нейтраллю і трансформатора напруги контролю ізоляції, що містить розрядник, що розташований в нейтралі, та комутаційний апарат, який відрізняється тим, що він додатково містить трансформатор струму в заземленій нейтралі високовольтної обмотки трансформатора напруги, до вторинної обмотки якого послідовно підключені блок захисту, блок керування та блок вмикання з виходом до ланцюга...
Контактор пристрою регулювання напруги під навантаженням
Номер патенту: 16217
Опубліковано: 29.08.1997
Автори: Моргунова Світлана Серафимовна, Богданов Леонід Дмитриєвич, Вайнштейн Анатолій Львович, Сініцина Тамара Миколаєвна
МПК: H01F 21/12
Мітки: регулювання, пристрою, навантаженням, напруги, контактор
Формула / Реферат:
Контактор устройства регулирования напряжения под нагрузкой, содержащий корпус, в котором расположены механизмы быстродействия и контактора, валы которых соединены соосно через жесткий соединительный элемент из диэлектрика, отличающийся тем, что, с целью уменьшения габаритов и материалоемкости, соединительный элемент выполнен в виде дискового барьера с радиальными ребрами по верхней поверхности с рельефной поверхностью в виде кольцевых...
Спосіб вимірювання первинної напруги силового трансформатора на підстанції
Номер патенту: 49575
Опубліковано: 26.04.2010
Автор: Кубкін Максим Володимирович
МПК: G01R 19/00
Мітки: підстанції, напруги, силового, вимірювання, спосіб, трансформатора, первинної
Формула / Реферат:
Спосіб вимірювання первинної напруги силового трансформатора на підстанції, що полягає у використанні вимірювальних перетворювачів напруги для зменшення напруги до значення зручного для безпосереднього підключення вимірювальних приладів і автоматики, який відрізняється тим, що вимірювання первинної напруги здійснюють шляхом додавання до вимірювальної вторинної напруги спаду напруги в силовому трансформаторі, який визначається за первинним та...
Попередній патент: Спосіб виходу на зв’язок з космічними апаратами із невідомими параметрами орбіти
Наступний патент: З’єднання дисків ротора
Випадковий патент: Сушарка для зерна