Автобалансуючий пристрій
Номер патенту: 53169
Опубліковано: 15.01.2003
Автори: Майоров Володимир Сергійович, Філімоніхін Генадій Борисович

Формула / Реферат
1. Автобалансуючий пристрій, що працює на позакритичній швидкості обертання, який містить корегуючі вантажі, вільно насаджені на осі, перпендикулярній валу, який відрізняється тим, що додатково встановлений механізм примусового приведення корегуючих вантажів в нейтральне положення.
2. Автобалансуючий пристрій за п. 1, який відрізняється тим, що механізм примусового приведення корегуючих вантажів в нейтральне положення утворює нелінійний момент, що зменшується при збільшенні кута повороту корегуючого вантажу.
3. Автобалансуючий пристрій за п. 2, який відрізняється тим, що механізм примусового приведення корегуючих вантажів в нейтральне положення виконано у вигляді двох пружин, які тиснуть на дві пластини, які охоплюють кінець осі корегуючого вантажу, виконаної у вигляді лиски.
4. Автобалансуючий пристрій за п. 2, який відрізняється тим, що механізм примусового приведення корегуючих вантажів в нейтральне положення виконано у вигляді зігнутої пружної пластини, яка охоплює кінець осі корегуючого вантажу, яка виконана у формі лиски і тисне на її поверхню.
Текст
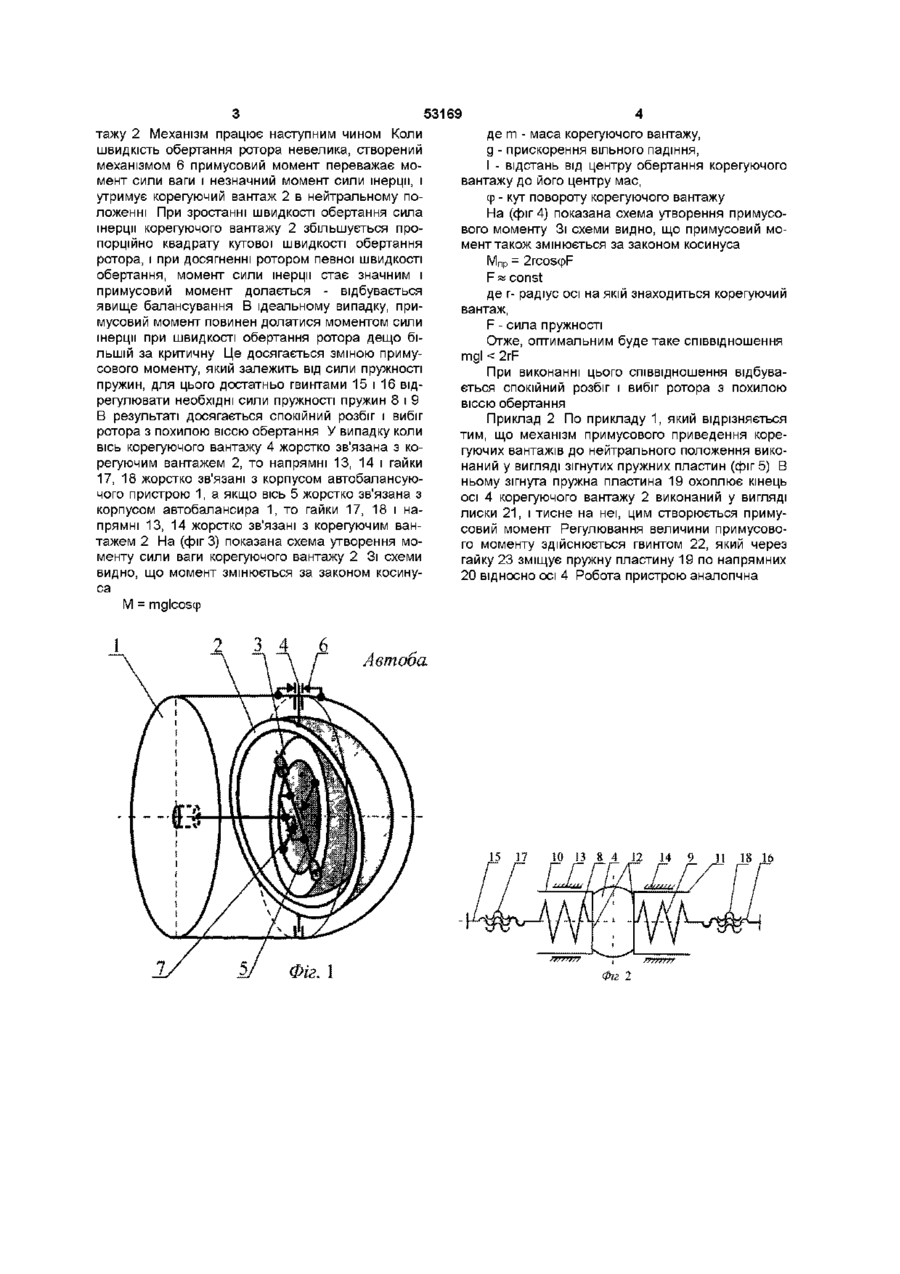
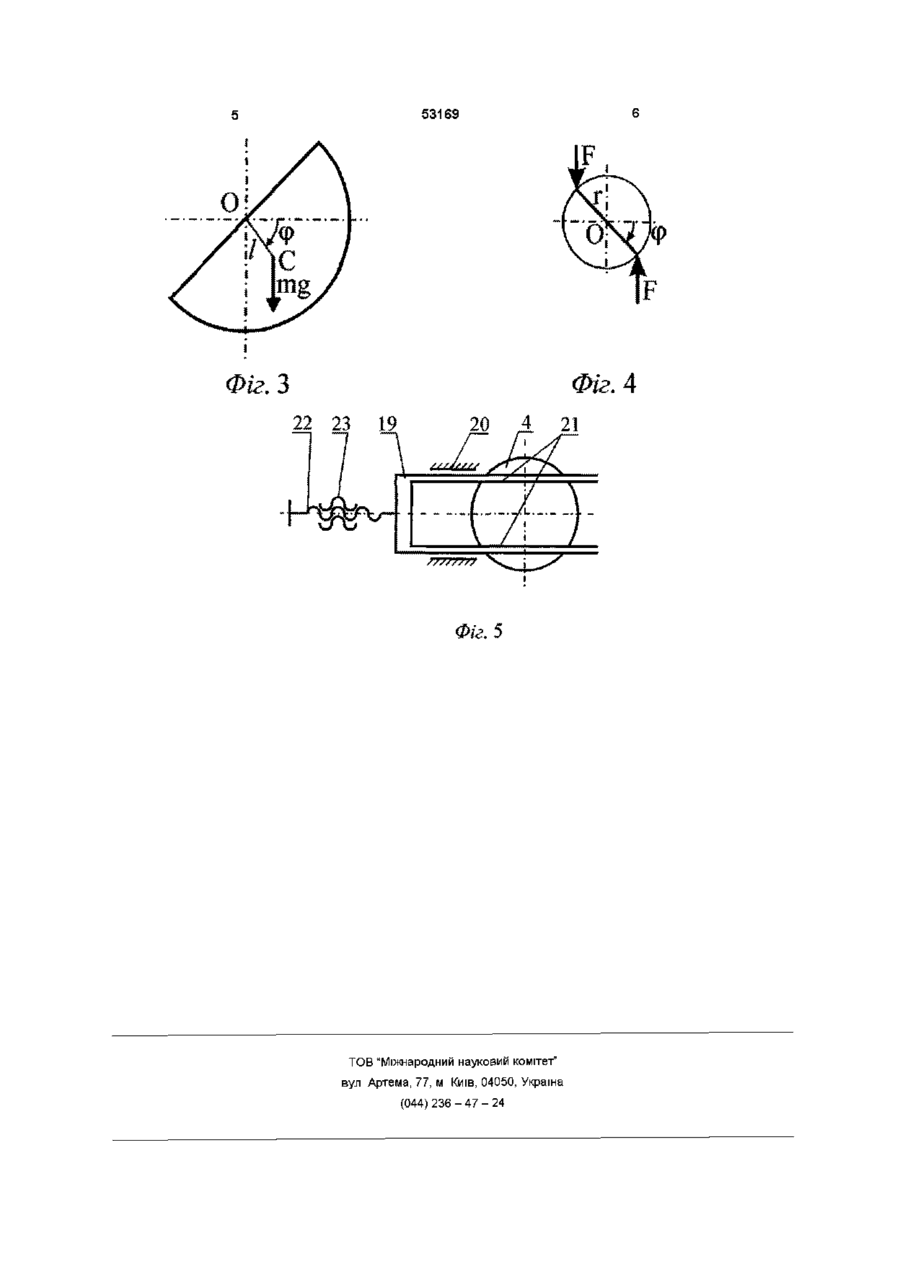
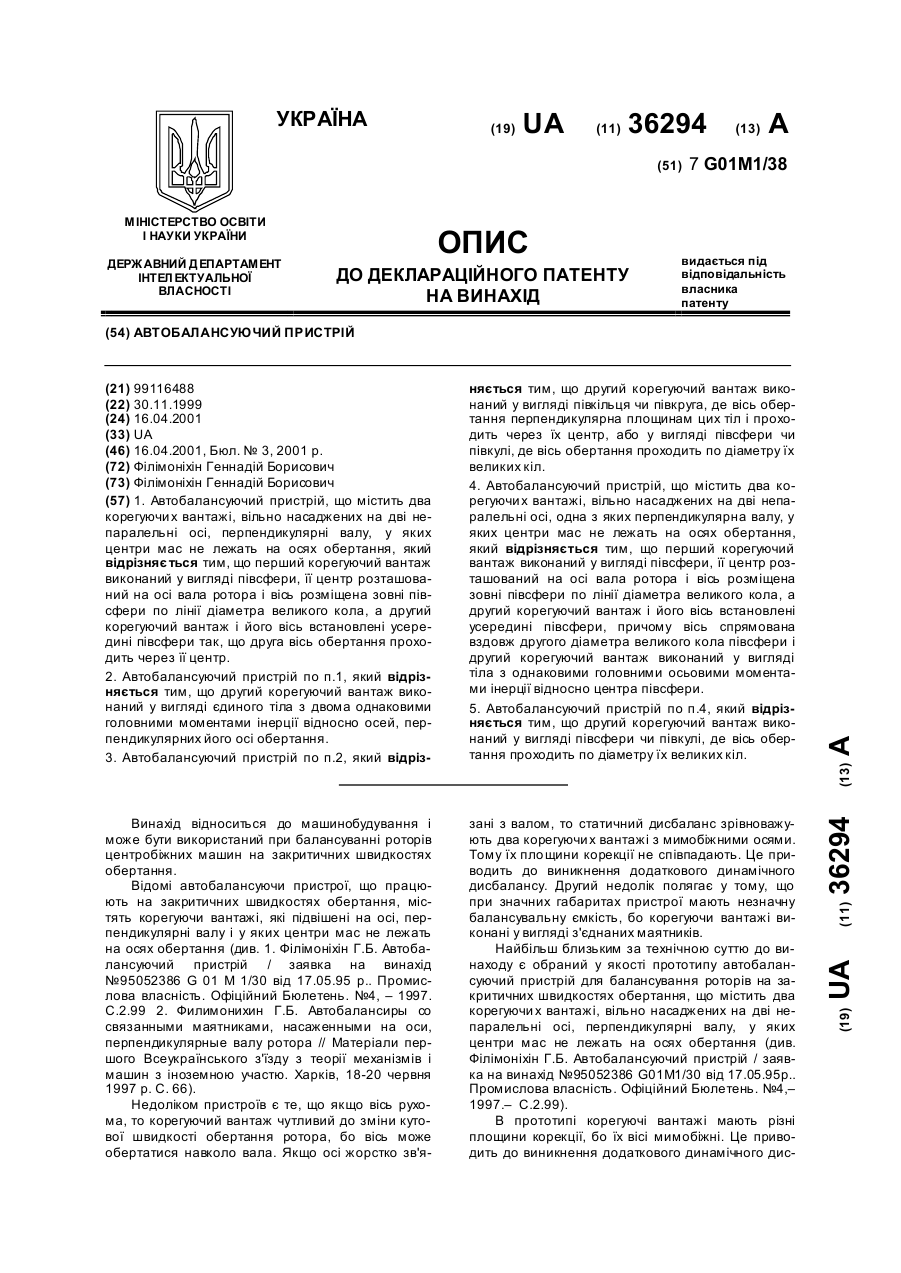
1 Автобалансуючий пристрій, що працює на позакритичній швидкості обертання, який містить корегуючі вантажі, вільно насаджені на осі, перпендикулярній валу, який відрізняється тим, що додатково встановлений механізм примусового приведення корегуючих вантажів в нейтральне положення 2 Автобалансуючий пристрій за п 1, який відріз Винахід відноситься до машинобудування і може бути використаний при балансуванні роторів відцентрових машин з похилою віссю обертання на за критичних швидкостях обертання ВІДОМІ автобалансуючі пристрої, які обрані за прототип, що працюють на за критичній швидкості обертання, містять корегуючі вантажі, вільно насаджені на осі, перпендикулярні валу (див 1 ФІЛІМОНІХІН Г Б Автобалансуючий пристрій / патент України № 95052386 G01M 1/30 Бюл № 4, -1997 Ці пристрої обрані в якості прототипу Недоліком пристроїв є те, що якщо вісь обертання ротора похила то корегуючі вантажі в момент пуску машини не знаходяться в нейтральному положенні, а відхилені від нього під дією сили ваги, і цим вносять додатковий дисбаланс, при цьому неможливий спокійний розбіг і вибіг ротора Винахід вирішує задачу приведення корегуючих вантажів до нейтрального положення, чим забезпечує спокійний розбіг і вибіг ротора Задача вирішується тим, що у пристрої, який працює на за критичній швидкості обертання, містить корегуючі вантажі, вільно насаджені на осі, перпендикулярні валу, додатково встановлені механізми примусового приведення корегуючих вантажів до нейтрального положення Враховуючи, що сили ваги утворюють відносно осей нелінійні няється тим, що механізм примусового приведення корегуючих вантажів в нейтральне положення утворює нелінійний момент, що зменшується при збільшенні кута повороту корегуючого вантажу 3 Автобалансуючий пристрій за п 2, який відрізняється тим, що механізм примусового приведення корегуючих вантажів в нейтральне положення виконано у вигляді двох пружин, які тиснуть на дві пластини, які охоплюють кінець осі корегуючого вантажу, виконаної у вигляді лиски 4 Автобалансуючий пристрій за п 2, який відрізняється тим, що механізм примусового приведення корегуючих вантажів в нейтральне положення виконано у вигляді зігнутої пружної пластини, яка охоплює кінець осі корегуючого вантажу, яка виконана у формі лиски і тисне на її поверхню ВІДХИЛЯЮЧІ моменти, то механізми примусового приведення корегуючих вантажів в нейтральне положення повинні утворювати нелінійні моменти, що зменшуються при збільшенні кута повороту корегуючого вантажу Зокрема нелінійний механізм примусового приведення корегуючих вантажів до нейтрального положення може бути виконаний у вигляді двох пружин, які тиснуть на дві пластини, які охоплюють кінець осі корегуючого вантажу, виконаної у вигляді лиски, або у вигляді зігнутої пружної пластини, яка охоплює кінець осі корегуючого вантажу, яка виконана у вигляді лиски, і тисне на неї Приклади конкретного виконання Приклад 1 На (фиг 1) зображений автобалансуючий пристрій 1, що містить корегуючи вантажі 2, 3 вільно насаджені на осі 4, 5 перпендикулярні валу, встановлені механізми 6, 7 примусового приведення корегуючих вантажів 2, 3 до нейтрального положення Зокрема механізми примусового приведення корегуючого вантажу в нейтральне положення може бути виконаний у вигляді двох пружин (фіг 2) Він МІСТИТЬ ДВІ пружини 8, 9, які тиснуть на дві пластини 10, 11, ці пластини охоплюють кінець осі 4, виконаній у вигляді лиски 12 Розглянемо роботу механізму на одному з корегуючих вантажів, наприклад, для корегуючого ван (О со Ю 53169 тажу 2 Механізм працює наступним чином Коли де m - маса корегуючого вантажу, швидкість обертання ротора невелика, створений g - прискорення вільного падіння, механізмом 6 примусовий момент переважає моІ - відстань від центру обертання корегуючого мент сили ваги і незначний момент сили інерції, і вантажу до його центру мас, утримує корегуючий вантаж 2 в нейтральному поФ - кут повороту корегуючого вантажу ложенні При зростанні швидкості обертання сила На (фіг 4) показана схема утворення примусоінерції корегуючого вантажу 2 збільшується прового моменту Зі схеми видно, що примусовий мопорційно квадрату кутової швидкості обертання мент також змінюється за законом косинуса ротора, і при досягненні ротором певної швидкості М пр = 2rcoscpF обертання, момент сили інерції стає значним і F и const примусовий момент долається - відбувається де г- радіус осі на якій знаходиться корегуючий явище балансування В ідеальному випадку, привантаж, мусовий момент повинен долатися моментом сили F - сила пружності інерції при швидкості обертання ротора дещо біОтже, оптимальним буде таке співвідношення льшій за критичну Це досягається зміною примуmgl < 2rF сового моменту, який залежить від сили пружності При виконанні цього співвідношення відбувапружин, для цього достатньо гвинтами 15 і 16 відється спокійний розбіг і вибіг ротора з похилою регулювати необхідні сили пружності пружин 8 і 9 віссю обертання В результаті досягається спокійний розбіг і вибіг Приклад 2 По прикладу 1, який відрізняється ротора з похилою віссю обертання У випадку коли тим, що механізм примусового приведення коревісь корегуючого вантажу 4 жорстко зв'язана з когуючих вантажів до нейтрального положення викорегуючим вантажем 2, то напрямні 13, 14 і гайки наний у вигляді зігнутих пружних пластин (фіг 5) В 17, 18 жорстко зв'язані з корпусом автобалансуюньому зігнута пружна пластина 19 охоплює кінець чого пристрою 1, а якщо вісь 5 жорстко зв'язана з осі 4 корегуючого вантажу 2 виконаний у вигляді корпусом автобалансира 1, то гайки 17, 18 і налиски 21, і тисне на неї, цим створюється примупрямні 13, 14 жорстко зв'язані з корегуючим вансовий момент Регулювання величини примусовотажем 2 На (фігЗ) показана схема утворення мого моменту здійснюється гвинтом 22, який через менту сили ваги корегуючого вантажу 2 Зі схеми гайку 23 зміщує пружну пластину 19 по напрямних видно, що момент змінюється за законом косину20 відносно осі 4 Робота пристрою аналогічна са М = mglcoscp Автоба L5 П Фіг. 1 10 ІЗ 8 4 J2 14 9 Ц 18 16 53169 F Фіг. 4 Фіг. З 22 23 19 20 1 21 Фіг. 5 ТОВ "Міжнародний науковий комітет" вул Артема, 77, м Київ, 04050, Україна (044)236-47-24
ДивитисяДодаткова інформація
Назва патенту англійськоюDevice for automatic balancing
Автори англійськоюFilimonikhin Hennadii Borysovych
Назва патенту російськоюУстройство для автоматической балансировки
Автори російськоюФилимонихин Геннадий Борисович
МПК / Мітки
МПК: G01M 1/30
Мітки: пристрій, автобалансуючий
Код посилання
<a href="https://ua.patents.su/3-53169-avtobalansuyuchijj-pristrijj.html" target="_blank" rel="follow" title="База патентів України">Автобалансуючий пристрій</a>
Автобалансуючий пристрій
Номер патенту: 36294
Опубліковано: 16.04.2001
Автор: Філімоніхін Геннадій Борисович
МПК: G01M 1/38
Мітки: пристрій, автобалансуючий
Текст:
...Тому вона є головною віссю інерції другого корегуючого вантажу. Тому поведінка цього вантажу аналогічна поведінці півсфери і площина корекції вантажу також проходить через точку О. Отже, площини корекції корегуючих вантажів співпадають. Описаній ідеальній роботі пристрою заважають сили ваги, але їх вплив на великих швидкостях обертання ротора незначний. Виконання першого корегуючого вантажу у вигляді півсфери і розміщення його осі обертання...
Автобалансуючий пристрій
Номер патенту: 36244
Опубліковано: 16.04.2001
Автор: Філімоніхін Геннадій Борисович
МПК: G01M 1/38
Мітки: автобалансуючий, пристрій
Текст:
...корегуючого вантажу до зміни кутової швидкості обертання ротора з'являється після його повороту навколо осі, що весь час перпендикулярна валу, бо після цього друга вісь перестає бу ти перпендикулярною до осі обертання ротора. Чим більший цей кут повороту, тим більша чутливість корегуючого вантажу до зміни кутової швидкості обертання ротора Тому пристрій найменш чутливий до зміни кутової швидкості обертання ротора при незначних...
Автобалансуючий пристрій
Номер патенту: 52430
Опубліковано: 16.12.2002
Автори: Невдаха Юрій Андрійович, Філімоніхін Геннадій Борисович
МПК: G01M 1/38
Мітки: пристрій, автобалансуючий
Формула / Реферат:
Автобалансуючий пристрій, що містить коригувальні вантажі, насаджені на осі, перпендикулярні валу і попарно зв'язані між собою з можливістю обертання навколо цих осей на рівні кути у протилежні боки, який відрізняється тим, що один з коригувальних вантажів в парі виконується меншої маси.
Автобалансуючий пристрій
Номер патенту: 21797
Опубліковано: 30.04.1998
Автор: Філімоніхін Геннадій Борисович
МПК: G01M 1/38
Мітки: пристрій, автобалансуючий
Формула / Реферат:
Автобалайсуючий пристрій, що містить корпус, встановлений співосно ротору, розташовані у корпусі чотири осі, дві пари зубчатих коліс, встановлених на осях і чотири корегуючі вантажі, кінематично з'єднані колесами, який відрізняється тим, що корегуючі вантажі виконані у вигляді кільцевих сегментів з зубцями усередині і встановлені у циліндричну напрямну, розміщену співосно осі ротора.
Автобалансуючий пристрій
Номер патенту: 40768
Опубліковано: 15.08.2001
Автори: Сотніков Валентин Семенович, Філімоніхін Геннадій Борисович
МПК: G01M 1/38
Мітки: пристрій, автобалансуючий
Формула / Реферат:
1. Автобалансуючий пристрій, що містить два з'єднаних під прямим кутом маятники і вісь, на яку вони насаджені, який відрізняється тим, що вісь встановлена з можливістю здійснювати сферичний рух навколо нерухомої точки на осі вала.2. Автобалансуючий пристрій по п.1, який відрізняється тим, що до маятників або осі кріпиться симетричне масивне тіло.
Попередній патент: Папір для виготовлення офортів
Наступний патент: Електрокоагулятор для очищення рідин
Випадковий патент: Спосіб проведення ремонту провалу склепіння залізобетонного каналізаційного трубопроводу