Спосіб виявлення буксування чи юза колісних пар транспортного засобу
Номер патенту: 53269
Опубліковано: 15.03.2007
Автори: Зарецький Михаїл Львович, Повійчук Олена Анатоліївна, Повійчук Борис Павлович, Гривнак Андрій Ярославович
Формула / Реферат
Спосіб виявлення буксування чи юза колісних пар транспортного засобу, відповідно до якого визначають силу опору руху та динамічне зусилля, на основі чого формують керуючий сигнал, який відрізняється тим, що силу опору руху визначають, використовуючи рівняння руху поїзда, а керуючий сигнал формують по різниці величин динамічних зусиль колісних пар і по величині динамічного зусилля кожної колісної пари, які свідчать про початок буксування чи юза.
Текст
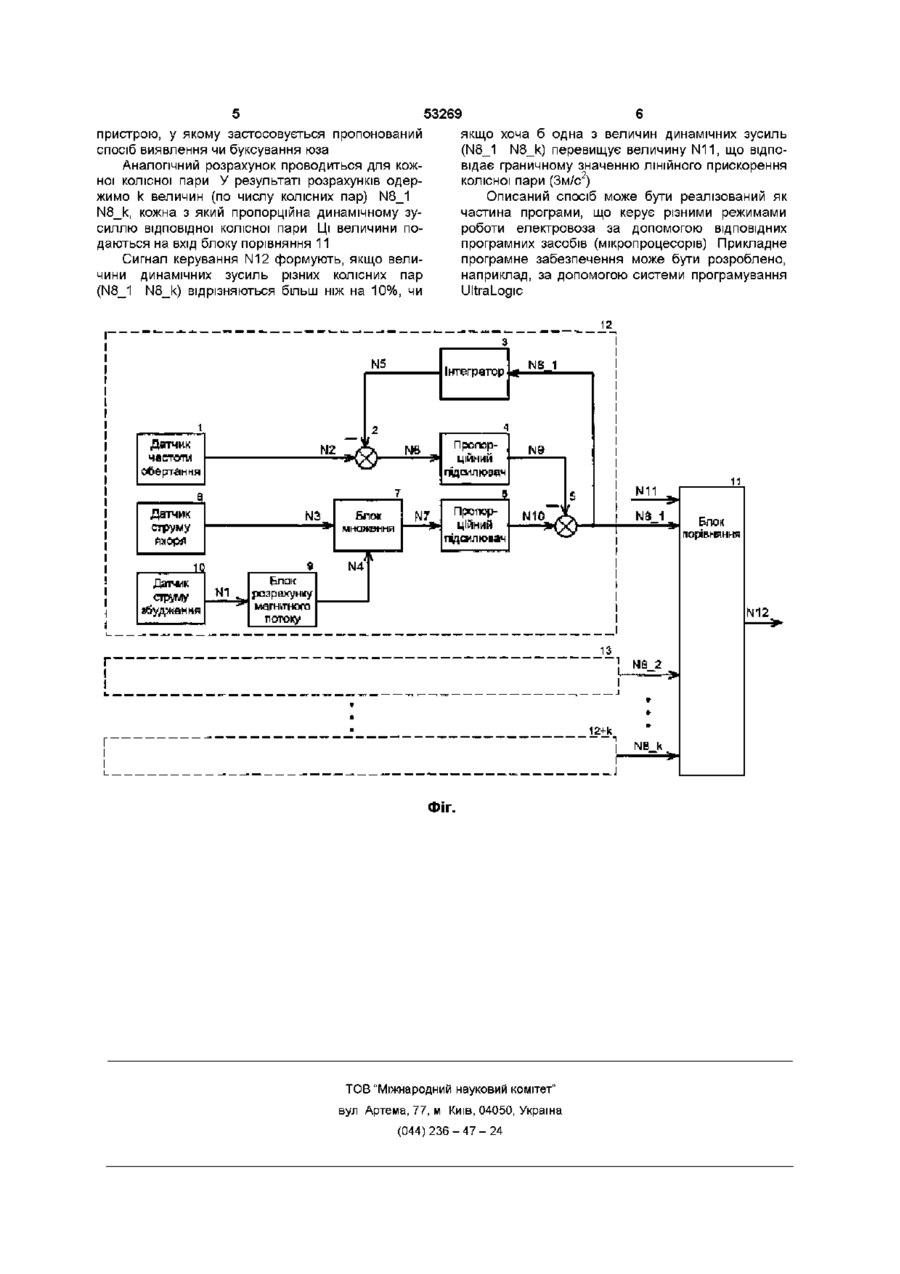
Спосіб виявлення буксування чи юза колісних пар транспортного засобу, ВІДПОВІДНО ДО ЯКОГО визначають силу опору руху, динамічне зусилля й одержують керуючий сигнал, який відрізняється тим, що силу опору руху визначають, використовуючи рівняння руху поїзда, а керуючий сигнал формують по різниці динамічних зусиль колісних пар і по величині динамічного зусилля кожної колісної пари, яка свідчить про початок буксування чи юза НІЙ парі дозволило б домогтися виявленню буксування (чи юза) на ранній стадії, як і в пристроях з формуванням ознаки буксування по величині прискорення колісної пари, тому що динамічний момент пропорційний прискоренню Причому розрахунок динамічного зусилля можна зробити без використання операції диференціювання, позбувшись у такий спосіб від схильності способу до видачі помилкових сигналів Відомий спосіб виявлення буксування рейкового транспортного засобу використанням пристрою (авторське посвідчення СРСР № 1009830, В 60 L 3/10) прийнятого за прототип, у якому по сигналах від датчиків тягового зусилля з, допомогою відомих залежностей (рівняння руху, емпірична формула для розрахунку сили опору руху) визначають величину, пропорційну динамічному зусиллю електровоза, що надходить на вхід інтегратора для обчислення частоти обертання відповідної колісної пари Сигнал керування формують, якщо різниця між обчисленим і обмірюваним за допомогою датчиків значеннями частоти обертання кожної колісної пари більше деякого заданого значення Обраний прототип володіє тим же недоліком, що і всі способи, ще використовують пристрої, у яких ознака наявності буксування формується по швидкості буксування виявляється тільки тоді, коли різниця розрахованої й обмірюваної швидкостей досить велика, а значить буксування вже досить сильне розвите Крім того, формула, по якій робиться розрахунок сили опору руху, є усередненою емпіричною залежністю сили опору від швид (О со ю 53269 кості електровоза і не несе повних зведень про величину сили опору в конкретних умовах В основу винаходу поставлена задача запобігання аварійних ситуацій і зниження експлуатаційних витрат за рахунок виявлення буксування чи юза на ранній стадії Ця задача вирішується тим, що пропонується спосіб виявлення буксування чи юза колісних пар транспортного засобу, при якому визначають силу опору руху, динамічне зусилля й одержують керуючий сигнал, при цьому силу опору руху визначають, використовуючи рівняння руху поїзда, а керуючий сигнал формують по різниці динамічних зусиль колісних пар і по величині динамічного зусилля кожної колісної пари, що свідчить про початок буксування чи юза Сформований таким способом сигнал дозволяє вчасно відреагувати і придушити ще нерозвинене буксування (чи юз) При достатній швидкодії можливе придушення буксування (чи юза) до того, як струм, і, ВІДПОВІДНО, тягове зусилля помітне зменшаться Пропонований спосіб виявлення чи буксування юза полягає в наступному при русі електровоза безупинно роблять розрахунок динамічного зусилля кожної колісної пари Потім розраховані величини динамічних зусиль колісних пар порівнюють між собою, а також з деякою заданою величиною, що відповідає, наприклад, лінійному прискоренню 3м/с Якщо величини динамічних зусиль різних колісних пар відрізняються більш, ніж на 10%, чи, якщо хоча б одна з величин перевищує згадане граничне значення, формують керуючий сигнал, ще свідчить про виявлення буксування (у режимі тяги) чи юза (у режимі гальмування) Визначення сили опору руху за допомогою рівняння руху поїзда дозволяє сформувати керуючий сигнал по величині динамічного зусилля, пропорційного прискоренню, що дає можливість знайти, а значить і подавити буксування (чи юз) на ранній стадії і тим самим знизити експлуатаційні витрати й уникнути аварійних ситуацій, що виникають при розносному буксуванні (чи юзі) Пропонований спосіб виявлення буксування чи юза здійснюють за допомогою спостерігача, структурна схема якого представлена на кресленні (див фіг) Спостерігач складається з k (по КІЛЬКОСТІ КОЛІ СНИХ пар) блоків розрахунку динамічного зусилля 12, 13 12 + к, виходи яких підключені до блоку порівняння Кожен блок розрахунку динамічного зусилля включає датчик частоти обертання тягового двигуна 1, з'єднаний з першим входом суматора 2, інший вхід якого підключений до виходу інтегратора 3, а вихід інтегратора 3 - через пропорційний підсилювач 4 до першого входу суматора 5 Інший вхід суматора 5 через пропорційний підсилювач 6 з'єднаний із блоком множення 7, входи якого зв'язані з виходами датчика струму якоря тягового двигуна 8 і блоку розрахунку магнітного потоку 9 Вхід блоку 9 підключений до виходу датчика струму порушення тягового двигуна 10 Вихід суматора 5 зв'язаний із входом інтегратора 3, а також з одним із входів блоку порівняння 11 Нижче описана робота спостерігача Від датчика струму збуджування тягового двигуна 10 на вхід блоку розрахунку магнітного потоку 9 надходить сигнал, пропорційний обмірюваному значенню струму порушення N1 Блок 9 має передатну характеристику, що збігається з характеристикою намагнічування ВІДПОВІДНОГО ТЯГОВОГО дви гуна, тому на його виході формується сигнал, пропорційний магнітному потоку двигуна N4 Цей сигнал надходить на вхід блоку множення 7, на інший вхід якого подається сигнал N3 від датчика струму якоря 8 цього ж тягового двигуна Таким чином, вихідний сигнал блоку множення 7 - N7 пропорційний величині добутку магнітного потоку на струм якоря (Ф Ія) Тому що зусилля, що розвивається тяговим двигуном, FflB, H, обчислюється по формулі ДВ 'ДВ D,, D,, Лз -СМ-Ф-ІЯ1 де |j - передатне відношення зубчастої передачі, DK - діаметр колеса, м, Пз - коефіцієнт корисної дії зубчастої передачі, Мдв - момент, що розвивається тяговим двигуном, Н-м, С - постійна тягового двигуна, Ф - магнітний потік, Вб, І я - струм якоря тягового двигуна, А, те, вважаючи п з постійним і підібравши коефіцієнт підсилення блоку 9 рівним Ко = D, •Лз-1 можна затверджувати, що вихідна величина пропорційного підсилювача N10 пропорційна тяговому зусиллю на ободах коліс колісної пари Суматор 5 робить вирахування сигналів N10, пропорційного тяговому зусиллю двигуна, що розвивається, FflB, і N9, пропорційного силі опору руху Результат вирахування N8_1, ВІДПОВІДНО ДО рівняння руху поїзда, пропорційним динамічному зусиллю FflHH, H ""дин ~ ""дв ~ ""с > ~ ~ де Fc - сила опору руху, що приходиться на одну колісну пару, Н Інтегратор 3 робить інтегрування сигналу N8_1, визначаючи тим самим величину N5, пропорційну частоті обертання колісної пари ш р , з 1 [F -dt, де J - сума моментів інерції тягового двигуна і колісної пари, приведена до осі колісної пари, кг м2 Оскільки при буксуванні (чи юзі) колесо прослизає і маса поїзда виключається з маси, приведеної до осі колісної пари, у формулу для визначення частоти обертання підставляють не момент інерції поїзда, а суму моментів інерції тягового двигуна і колісної пари, приведену до осі колісної пари Від датчика частоти обертання тягового двигуна 1 на вхід суматора 2 надходить сигнал N2, пропорційний обмірюваному значенню частоти обертання шо, с 1 Сигнал неузгодженості N6 надходить на вхід пропорційного підсилювача 4 Коефіцієнт підсилення підсилювача приймається рівним одиниці, але може бути змінений за результатами ІСПИТІВ 53269 якщо хоча б одна з величин динамічних зусиль (N8_1 N8_k) перевищує величину N11, що відповідає граничному значенню ЛІНІЙНОГО прискорення колісної пари (3м/с2) Описаний спосіб може бути реалізований як частина програми, що керує різними режимами роботи електровоза за допомогою ВІДПОВІДНИХ програмних засобів (мікропроцесорів) Прикладне програмне забезпечення може бути розроблено, наприклад, за допомогою системи програмування UltraLogic пристрою, у якому застосовується пропонований спосіб виявлення чи буксування юза Аналогічний розрахунок проводиться для кожної колісної пари У результаті розрахунків одержимо k величин (по числу колісних пар) N8_1 N8_k, кожна з який пропорційна динамічному зусиллю відповідної колісної пари Ці величини подаються на вхід блоку порівняння 11 Сигнал керування N12 формують, якщо величини динамічних зусиль різних колісних пар (N8_1 N8_k) відрізняються більш ніж на 10%, чи N5 N2 — и Датчик часто™ обертання а N3 9 10 збудження m Блок розрахунку Бло* мьюжвннл N3 1 Пропорційний підсилювач N6 7 Датчик струму Дат-ик Інтегратор 9 ПрОЛСрЦІЙНгіЙ N7 підсилювач N10 -*чф 1L N4 потоку 12+к ФІГ. ТОВ "Міжнародний науковий комітет" вул Артема, 77, м Київ, 04050, Україна (044)236-47-24
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod of identification of slipping or skid of wheel pairs of transportation means
Автори англійськоюHryvnak Andrii Yaroslavovych, Poviichuk Borys Pavlovych
Назва патенту російськоюСпособ выявления буксования или юза колесных пар транспортного средства
Автори російськоюГривнак Андрей Ярославович, Повийчук Борис Павлович
МПК / Мітки
МПК: B60L 3/10
Мітки: виявлення, спосіб, пар, транспортного, колісних, буксування, засобу, юза
Код посилання
<a href="https://ua.patents.su/3-53269-sposib-viyavlennya-buksuvannya-chi-yuza-kolisnikh-par-transportnogo-zasobu.html" target="_blank" rel="follow" title="База патентів України">Спосіб виявлення буксування чи юза колісних пар транспортного засобу</a>
Пристрій для виявлення буксування чи юза колісних пар транспортного засобу
Номер патенту: 8782
Опубліковано: 15.08.2005
Автор: Шапран Євген Миколайович
МПК: G01P 15/16, B60L 3/10
Мітки: транспортного, юза, буксування, колісних, засобу, пристрій, виявлення, пар
Формула / Реферат:
Пристрій для виявлення буксування чи юза колісних пар транспортного засобу, що має для всіх ведучих колісних пар блоки розрахунку динамічного зусилля, кожен з яких містить датчик частоти обертання тягового двигуна, з'єднаний з одним із входів додаткового суматора, інший вхід якого підключений до виходу інтегратора, датчик струму якоря тягового двигуна, вихід якого з'єднаний з одним із входів блока множення, інший вхід якого через блок...
Спосіб і пристрій виявлення реалізації граничних сил зчеплення та попередження буксування (юза) колісних пар тягового рейкового транспорту
Номер патенту: 73692
Опубліковано: 15.08.2005
Автори: Павленко Антон Альбертович, Павленко Владислав Альбертович, Павленко Альберт Прокопович
МПК: B61C 15/00, B60L 3/10
Мітки: транспорту, пар, реалізації, зчеплення, виявлення, спосіб, колісних, рейкового, попередження, юза, буксування, пристрій, тягового, граничних, сіль
Формула / Реферат:
1. Спосіб виявлення реалізації граничних сил зчеплення і попередження буксування (юза) колісних пар тягового рейкового транспорту, згідно з яким реалізацію кожною колісною парою граничних сил її зчеплення з рейками виявляють на інтервалі часу до початку розвитку реального буксування шляхом реєстрації перевищення призначених порогових величин попередньо виділеними за допомогою вузькосмугових частотних фільтрів нормованими гармонічними...
Пристрій для виявлення буксування колісних пар локомотива
Номер патенту: 15171
Опубліковано: 15.06.2006
Автор: Шапран Євген Миколайович
МПК: G01P 15/16, B60L 3/10
Мітки: виявлення, буксування, пристрій, пар, колісних, локомотива
Формула / Реферат:
Пристрій для виявлення буксування колісних пар локомотива, який містить датчики струму і напруги тягових двигунів, підключених до входів відповідних диференціюючих блоків, елемент затримки, інвертор, логічний елемент кон'юнкції, виконавчий блок, а також задатчик інтервалів часу, перший та другий ключові елементи, виходи яких з'єднані з входами логічного елемента кон'юнкції, перший та другий інтегратори, перші входи яких з'єднані з виходами...
Пристрій для змащування гребенів колісних пар рейкового транспортного засобу

Номер патенту: 67211
Опубліковано: 15.06.2004
Автори: Бєлозьоров Євген Володимирович, Вівденко Юрій Григорійович, Бєлозьорова Вікторія Володимирівна, Голубенко Олександр Леонідович, Спірягін Максим Ігоревич
МПК: B61K 3/00
Мітки: гребенів, колісних, пристрій, засобу, рейкового, змащування, транспортного, пар
Формула / Реферат:
Пристрій для змащування гребенів колісних пар рейкового транспортного засобу, який містить резервуар з мастилом, масляний трубопровід, змащувальний елемент та запірно-регулюючий механізм, який відрізняється тим, що як резервуар з мастилом застосовано резервуар, розташований на осі колісної пари з можливістю створення відцентрової сили під час руху транспортного засобу для витиску рідкого мастила, як запірно-регулюючий механізм для мастила...
Пристрій виявлення буксування та юзу коліс рейкового транспортного засобу
Номер патенту: 19743
Опубліковано: 25.12.1997
Автори: Павленко Антон Альбертович, Кутовий Юрій Миколайович, Павленко Альберт Прокопович, Клепіков Володимир Борисович
МПК: B60L 3/10
Мітки: виявлення, засобу, юзу, рейкового, буксування, коліс, транспортного, пристрій
Формула / Реферат:
1. Устройство обнаружения буксования и юза колес рельсового транспортного средства, содержащее датчик колебаний механической части привода колесной пары и первый канал обнаружения буксования и юза, включающий последовательно соединенные первый полосовой фильтр с полоской пропускания нижних частот колебаний механической части привода колесной пары, первый выпрямитель, первый сглаживающий фильтр, первый пороговый элемент, и второй пороговый...
Попередній патент: Пристрій для захисту від механічних пошкоджень різних поверхонь, переважно трубопроводу
Наступний патент: Машина і спосіб для очищення щебеню
Випадковий патент: Пристрій для натягання ланцюгової передачі