Система керування безпілотним літальним апаратом
Номер патенту: 54022
Опубліковано: 25.10.2010
Автори: Симонов Володимир Федорович, Бандура Іван Миколайович, Назарова Анастасія Олександрівна
Формула / Реферат
Система керування безпілотним літальним апаратом, що складається з послідовно з'єднаних підсилювача, рульової машини, керма висоти, безпілотного літального апарата, а також пристрою зворотного зв'язку, вхід якого з'єднаний з першим виходом рульової машини, швидкісного гіроскопа, вхід якого з'єднаний з виходом безпілотного літального апарата, гіровертикалі, вхід якої з'єднаний з виходом безпілотного літального апарата, висотоміра, вхід якого з'єднаний з виходом безпілотного літального апарата, яка відрізняється тим, що до її складу введені послідовно з'єднані задавач, мультиплексор, аналого-цифровий перетворювач, обчислювач, цифро-аналоговий перетворювач, вихід якого з'єднаний з підсилювачем, а також датчик напруги, вхід якого з'єднаний з другим виходом рульової машини, а вихід з'єднаний через перший нормуючий підсилювач з шостим входом мультиплексора, датчик струму, вхід якого з'єднаний з третім виходом рульової машини, а вихід з'єднаний через другий нормуючий підсилювач з сьомим входом мультиплексора, при цьому виходи пристрою зворотного зв'язку, швидкісного гіроскопа, гіровертикалі та висотоміра з'єднані відповідно з другим, третім, четвертим та п'ятим входами мультиплексора.
Текст
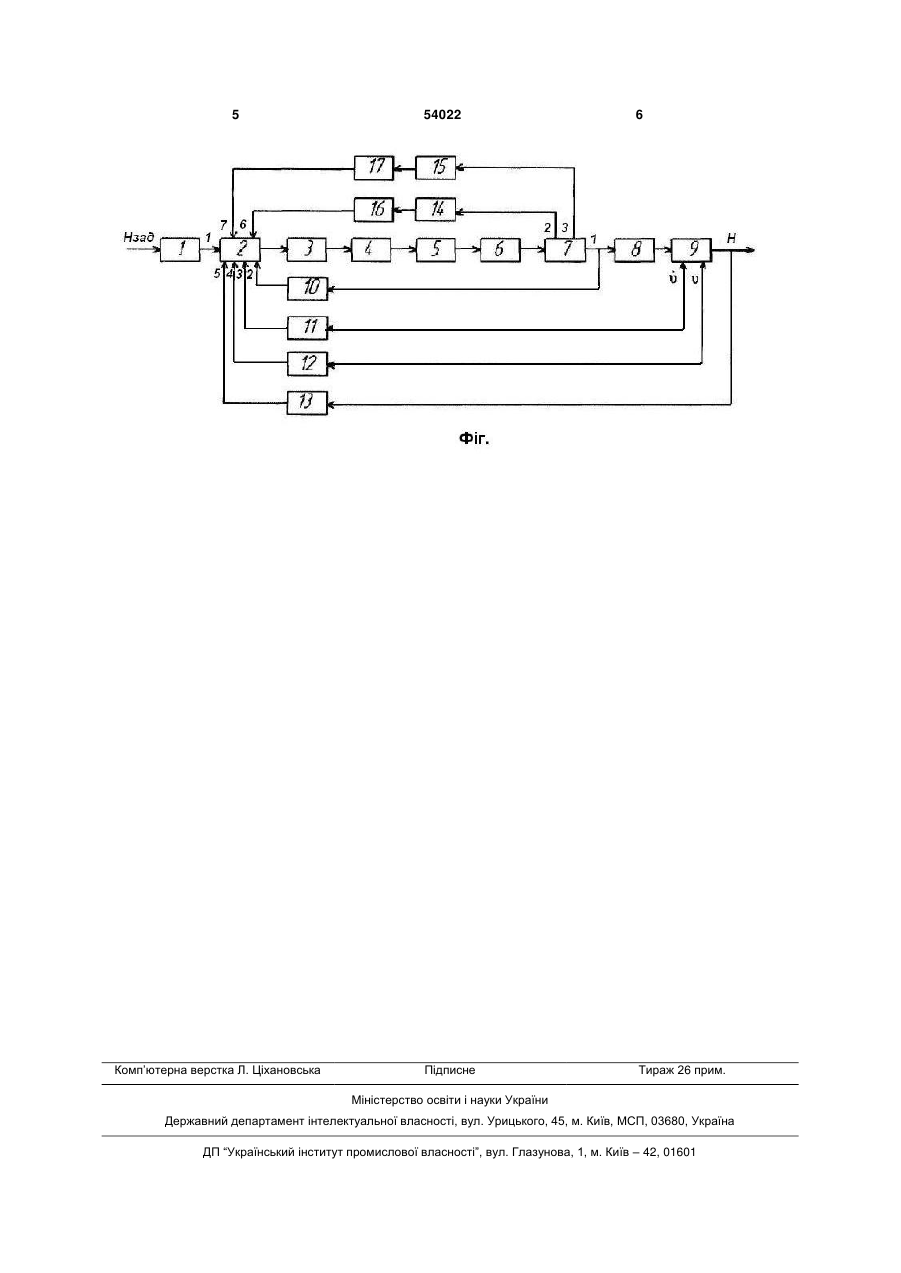
Система керування безпілотним літальним апаратом, що складається з послідовно з'єднаних підсилювача, рульової машини, керма висоти, безпілотного літального апарата, а також пристрою зворотного зв'язку, вхід якого з'єднаний з першим виходом рульової машини, швидкісного гіроскопа, вхід якого з'єднаний з виходом безпілотного літального апарата, гіровертикалі, вхід якої 3 54022 ний з підсилювачем, а також датчик напруги, вхід якого з'єднаний з другим виходом рульової машини, а вихід з'єднаний через перший нормуючий підсилювач з шостим входом мультиплексора, датчик струму, вхід якого з'єднаний з третім виходом рульової машини, а вихід з'єднаний через другий нормуючий підсилювач з сьомим входом мультиплексора, виходи пристрою зворотного зв'язку, швидкісного гіроскопа, гіровертикалі та висотоміра з'єднані відповідно з другим, третім, четвертим та п'ятим входами мультиплексора. Сутність корисної моделі пояснюється кресленням, де на Фіг. зображена блок-схема запропонованої оптимальної за витратою енергії на керування системи безпілотного літального апарата. Система керування безпілотного літального апарата містить: послідовно з'єднані задавач 1, мультиплексор 2, аналого-цифровий перетворювач 3, обчислювач 4, цифро-аналоговий перетворювач 5, підсилювач 6, рульову машину 7, кермо висоти 8, БПЛА 9. Мультиплексор 2 має сім входів. Перший вхід мультиплексора 2 підключений до виходу задавача 1. На БПЛА 9 встановлені: швидкісний гіроскоп 11, що вимірює кутову швидкість тангажа ', його вихід з'єднаний з третім входом мультиплексора 2, гіровертикаль 12, яка вимірює кут тангажа , її вихід з'єднаний з четвертим входом мультиплексора 2, висотомір 13, який вимірює висоту Н, його вихід з'єднаний з п'ятим входом мультиплексора 2. Вхід пристрою зворотного зв'язку 10, з'єднаний з першим виходом рульової машини 7, а вихід - з другим входом мультиплексора 2. Вхід датчика напруги 14, з'єднаний з другим виходом рульової машини 7, а вихід - з входом першого нормуючого підсилювача 16. Вхід датчика струму 15 з'єднаний з третім виходом рульової машини 7, а вихід - з входом другого нормуючого підсилювача 17. Вихід першого нормуючого підсилювача 16 з'єднаний з шостим входом мультиплексора 2, а вихід другого нормуючого підсилювача 17 з'єднаний з сьомим входом мультиплексора 2. Система керування безпілотним літальним апаратом працює наступним чином: під час польоту на перший вхід мультиплексора 2 через задавач 1 подається сигнал про задане значення висоти, який порівнюється в обчислювачі з дійсним Uцо ( t ) значенням висоти. Якщо між цими сигналами є різниця, то сигнал з виходу мультиплексора 2 через аналого-цифровий перетворювач 3 надходить на вхід обчислювача 4. Сигнал з виходу обчислювача 4 через цифро-аналоговий перетворювач 5 іде на підсилювач 6, а потім на рульову машину 7, яка повертає кермо висоти 8, що викликає поворот БПЛА 9, на якому встановлені: швидкісний гіроскоп 11, що вимірює кутову швидкість ', гіровертикаль 12, яка вимірює кут тангажа , висотомір 13, який вимірює висоту Н, ці сигнали подаються відповідно на другий, третій, четвертий та п'ятий входи мультиплексора 2. Сигнал з висотоміра викликає відхилення керма висоти, поворот поздовжньої осі та змінення кута атаки на величину, пропорційну відхиленню висоти. Збільшення підйомної сили викликає поворот вектора швидкості в вертикальній площині та появу вертикальної швидкості. За рахунок вертикальної швидкості змінюється барометрична висота та змінюється сигнал висотоміра 13. При цьому кермо висоти 8 відхилиться в протилежний бік та вийде змінення підйомної сили зворотного знаку. Під дією зворотного змінення підйомної силі вектор швидкості почне знову обертатися до горизонтального положення, і зміна висоти буде продовжуватись у тому ж напрямку. Сигнал про значення напруги подається з другого виходу рульової машини 7 на датчик напруги 14, далі - через перший нормуючий підсилювач 16 на шостий вхід мультиплексора 2. Сигнал про діюче значення струму подається з третього виходу рульової машини 7 на датчик струму 15, далі через другий нормуючий підсилювач 17 на сьомий вхід мультиплексора 2. Обчислювач реалізує оптимальний за витратами електроенергії алгоритм керування. Критерій оптимальності має вигляд: t 2 I U ( )d . 0 цо Цифровий обчислювач на основі інформації про струм і напругу рульового приводу, а також про стан літального апарата виробляє керуючу дію за алгоритмом, знайденим за допомогою аналітичного конструюванню регулятора: C1Uрм( t ) C2i( t ) C3 H( t ) C4U де Uрм - напруга рульової машини; і - струм; H - відхилення від заданого значення висоти; - відхилення від заданого значення кута тангажа; ' - відхилення від заданого значення кутової швидкості тангажа; рв - кут руля висоти. 4 ( t ) C5 ( t ) C6 рв( t ) , Таким чином, введення до системи додатково датчиків напруги та струму, нормуючих підсилювачів, аналого-цифрових підсилювачів та цифрового обчислювача, що реалізує оптимальний за витратами енергії закон керування, дозволяє забезпечити найбільш економний режим споживання енергії, що витрачається на безпілотному літальному апараті і тим самим збільшити його дальність польоту. 5 Комп’ютерна верстка Л. Ціхановська 54022 6 Підписне Тираж 26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюControl system of pilotless vehicle
Автори англійськоюSymonov Volodymyr Fedorovych, Bandura Ivan Mykolaiovych, Nazarova Anastasia Oleksandrivna
Назва патенту російськоюСистема управления беспилотным летательным аппаратом
Автори російськоюСимонов Владимир Федорович, Бандура Иван Николаевич, Назарова Анастасия Александровна
МПК / Мітки
МПК: B64C 13/00
Мітки: керування, безпілотним, літальним, апаратом, система
Код посилання
<a href="https://ua.patents.su/3-54022-sistema-keruvannya-bezpilotnim-litalnim-aparatom.html" target="_blank" rel="follow" title="База патентів України">Система керування безпілотним літальним апаратом</a>
Система керування безпілотним літальним апаратом
Номер патенту: 46179
Опубліковано: 10.12.2009
Автори: Кулік Анатолій Степанович, Фірсов Сергій Миколайович, До Куок Туан, Гусарова Ганна Григорівна
МПК: B64C 21/00
Мітки: керування, літальним, апаратом, система, безпілотним
Формула / Реферат:
Система керування безпілотним літальним апаратом, яка містить пристрій управління, електричний привід, з'єднаний з виходом пристрою управління, датчик кутової швидкості, з'єднаний з першим входом пристрою управління, датчик кута, з'єднаний з другим входом пристрою управління, яка відрізняється тим, що в неї введені магнітний курс, висотомір, GPS, виходи яких підключені до третього, четвертого, п'ятого входів пристрою управління...
Система керування літальним апаратом
Номер патенту: 36519
Опубліковано: 27.10.2008
Автори: Бандура Іван Миколайович, Полторацька Маргарита Миколаївна, Симонов Володимир Федорович
МПК: B64C 13/00, G05D 1/03
Мітки: керування, система, літальним, апаратом
Формула / Реферат:
Система керування літальним апаратом, що містить важіль керування, завантажувальну пружину, датчик кутового положення важеля керування, обчислювач, сервопривід керма висоти, кермо висоти, датчик кута тангажа, датчик кутової швидкості та датчик кутового прискорення літального апарата, перший диференціюючий пристрій, другий диференціюючий пристрій, яка відрізняється тим, що до її складу введені перший аналого-цифровий перетворювач, вхід якого...
Відмовостійка система керування літальним апаратом
Номер патенту: 36472
Опубліковано: 27.10.2008
Автор: Кулік Анатолій Степанович
МПК: G05D 1/10
Мітки: система, апаратом, літальним, відмовостійка, керування
Формула / Реферат:
Відмовостійка система керування літальним апаратом, що має аналого-цифровий перетворювач, бортову обчислювальну машину, цифро-аналоговий перетворювач, причому виходи аналого-цифрового перетворювача з'єднані з входами бортової цифрової обчислювальної машини, виходи якої з'єднані з входами цифро-аналогового перетворювача об'єкта керування, яка відрізняється тим, що містить блок відмовостійких сервоприводів, блок відмовостійких давачів, причому...
Система керування космічним літальним апаратом
Номер патенту: 18400
Опубліковано: 15.11.2006
Автори: Бандура Іван Миколайович, Малєва Людмила Сергіївна, Гордін Олександр Григорович
МПК: B64G 1/24
Мітки: космічним, апаратом, керування, літальним, система
Формула / Реферат:
Система керування космічним літальним апаратом (КЛА), що містить триступеневий гіроскопічний виконавчий орган, датчики моментів на осях підвісу внутрішньої та зовнішньої рами, датчики кута та кутової швидкості КЛА, виходи яких, через попередні перетворювачі, з'єднані з входами блока керування, перший підсилювач потужності підключений до датчика моменту на осі підвісу зовнішньої рами, яка відрізняється тим, що в неї введені два маховики,...
Система керування космічним літальним апаратом

Номер патенту: 67029
Опубліковано: 15.06.2004
Автори: Батаєв Віктор Олександрович, Овсяннікова Ірина Валеріївна, Погудін Андрій Володимирович, Бандура Іван Миколайович
МПК: B64G 1/24
Мітки: літальним, керування, апаратом, космічним, система
Формула / Реферат:
Система керування космічним літальним апаратом, що містить датчик кута та датчик кутових швидкостей, які з'єднані через перший і другий масштабні блоки з формувачем закону керування, і підсилювач потужності, яка відрізняється тим, що в неї введені послідовно включені інтегратор, порівнюючий пристрій, з'єднаний через підсилювач потужності з ротором електродвигуна, на роторі встановлений тахометр, який з'єднаний з другим входом порівнюючого...
Попередній патент: Спосіб отримання гетерошарів оксиду цинку
Наступний патент: Індуктивний негасенсор на інверторі імітансу
Випадковий патент: Спосіб кістково-пластичного заміщення дефекту трубчастої кістки, яка уражена доброякісною пухлиною