Система керування літальним апаратом
Номер патенту: 36519
Опубліковано: 27.10.2008
Автори: Бандура Іван Миколайович, Полторацька Маргарита Миколаївна, Симонов Володимир Федорович
Формула / Реферат
Система керування літальним апаратом, що містить важіль керування, завантажувальну пружину, датчик кутового положення важеля керування, обчислювач, сервопривід керма висоти, кермо висоти, датчик кута тангажа, датчик кутової швидкості та датчик кутового прискорення літального апарата, перший диференціюючий пристрій, другий диференціюючий пристрій, яка відрізняється тим, що до її складу введені перший аналого-цифровий перетворювач, вхід якого з'єднаний з виходом датчика кутового положення важеля керування, а вихід - з першим входом мультиплексора та з входом першого диференціюючого пристрою, мультиплексор, другий вхід якого з'єднаний з виходом другого аналого-цифрового перетворювача, третій - з виходом третього аналого-цифрового перетворювача, четвертий - з виходом четвертого аналого-цифрового перетворювача, п'ятий - з виходом першого диференціюючого пристрою, шостий - з виходом другого диференціюючого пристрою, а вихід - з входом обчислювача, перший нормуючий підсилювач, вхід якого з'єднаний з виходом датчика кута тангажа, а вихід - з входом другого аналого-цифрового перетворювача, другий нормуючий підсилювач, вхід якого з'єднаний з виходом датчика кутової швидкості, а вихід - з входом третього аналого-цифрового перетворювача, третій нормуючий підсилювач, вхід якого з'єднаний з виходом датчика кутового прискорення літального апарата, а вихід - з входом четвертого аналого-цифрового перетворювача.
Текст
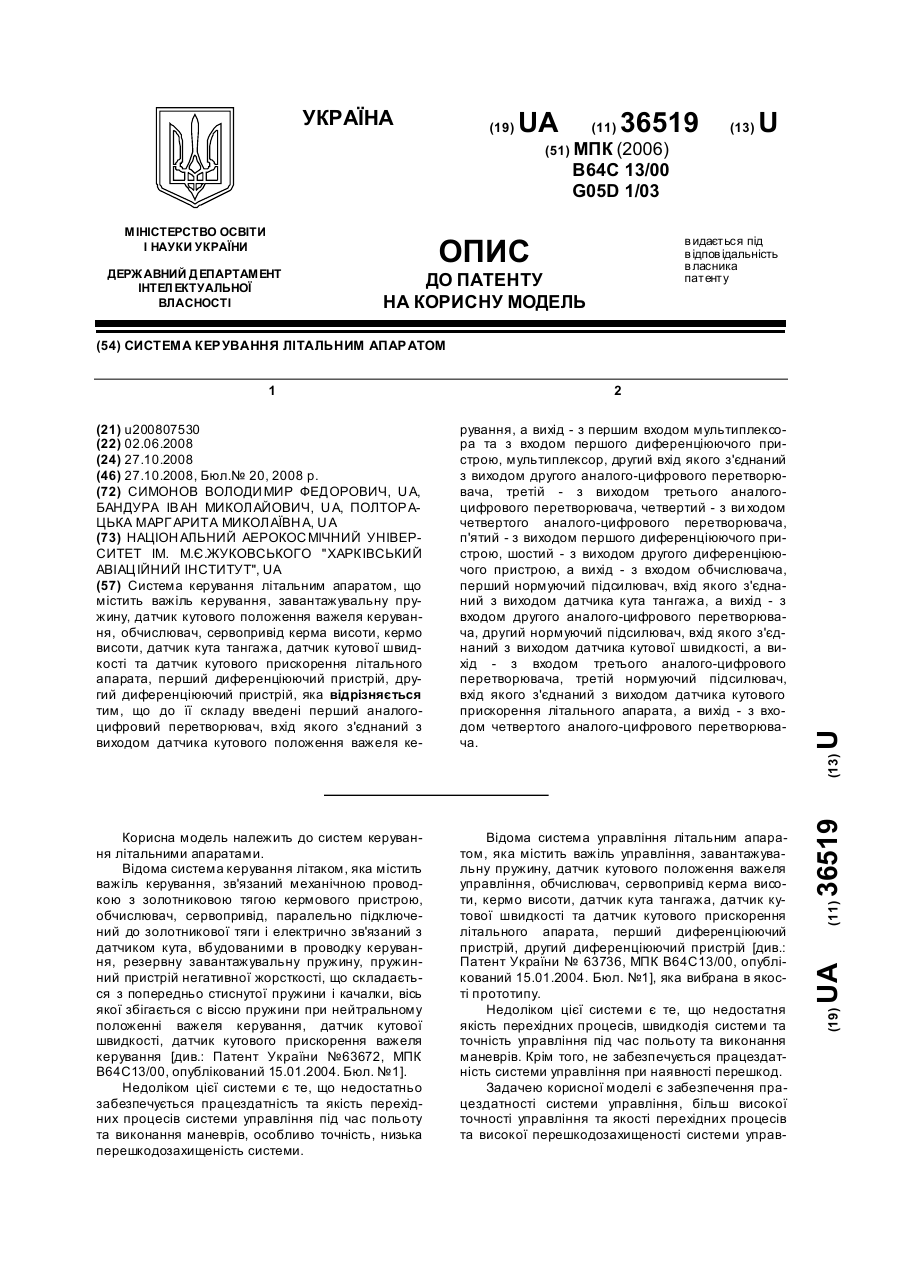
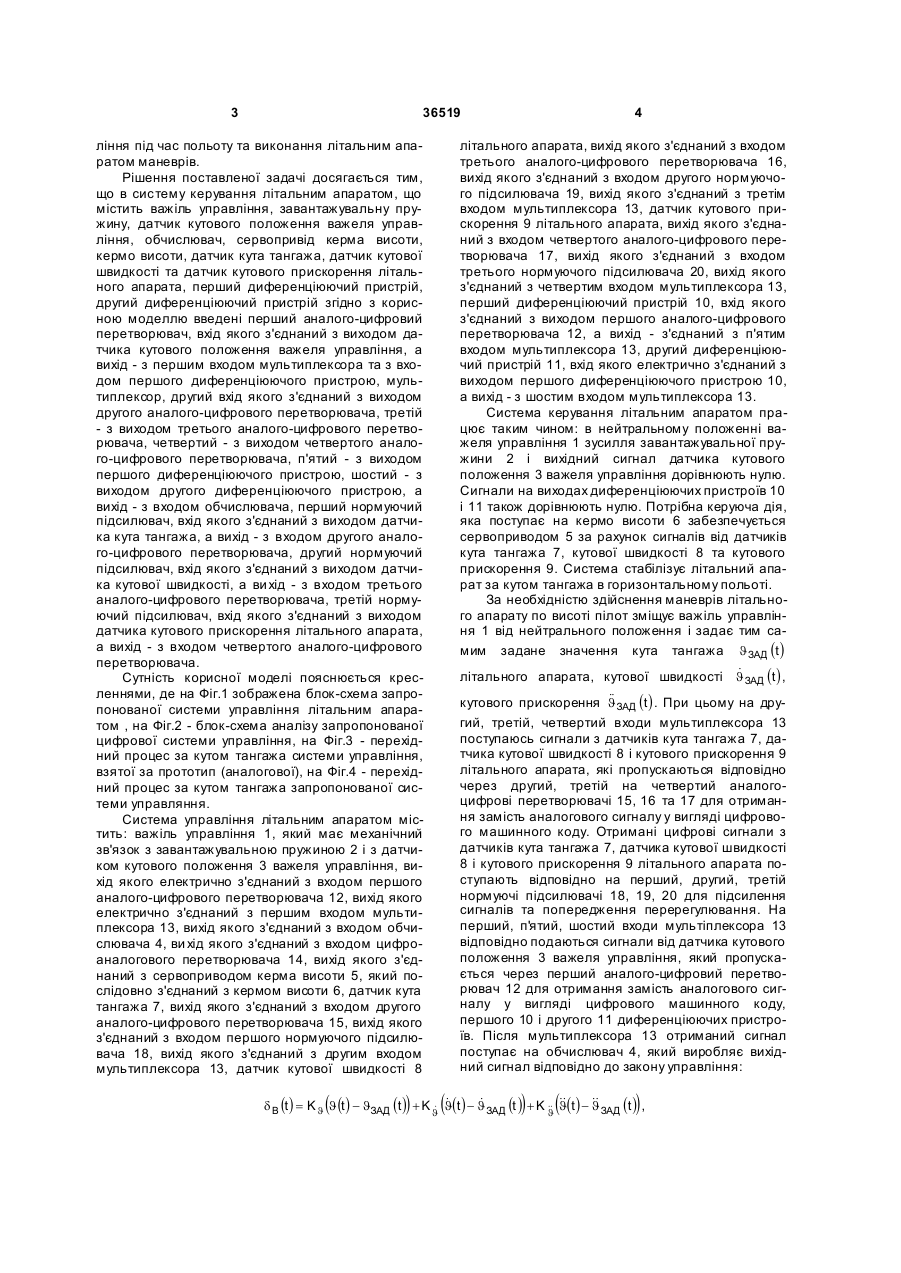
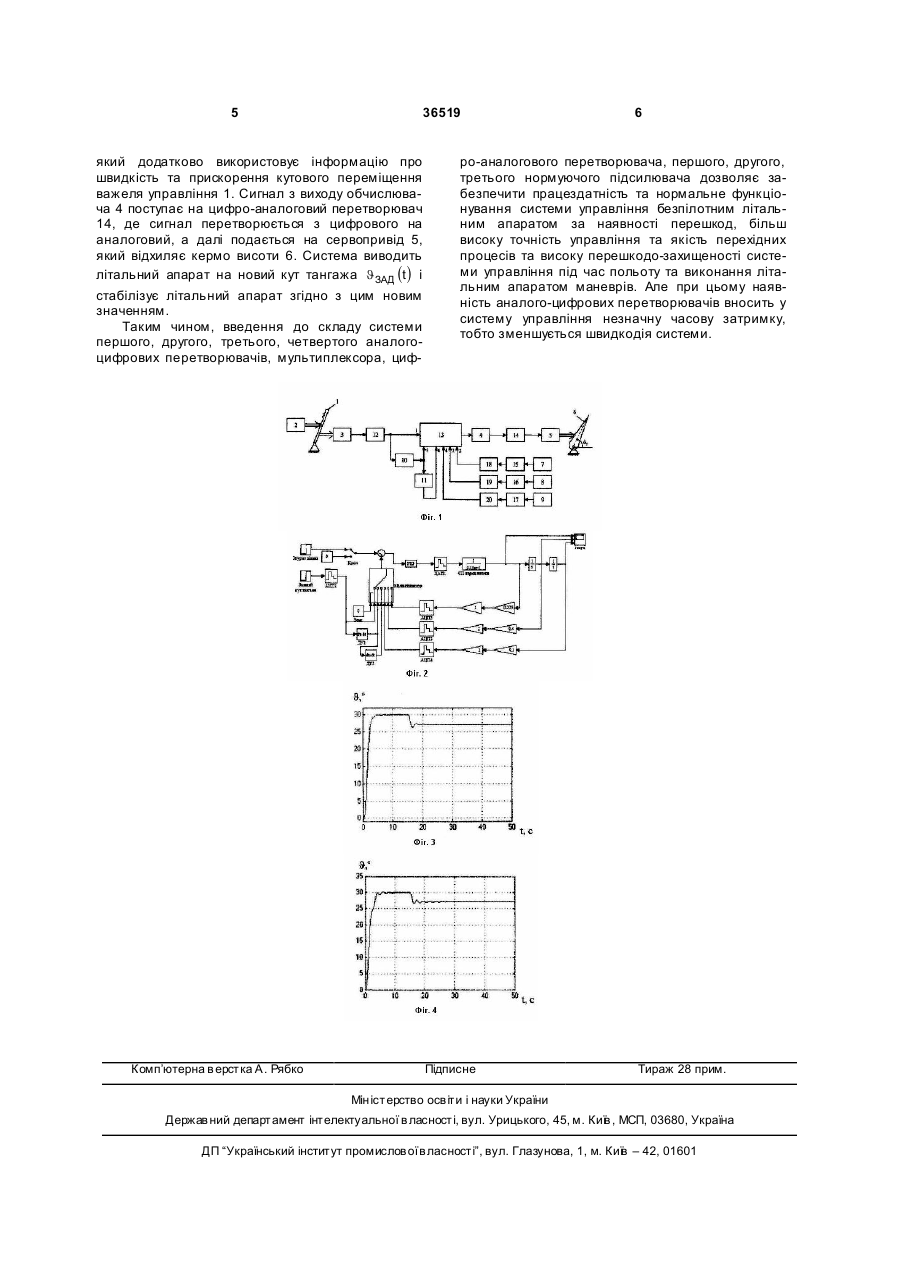
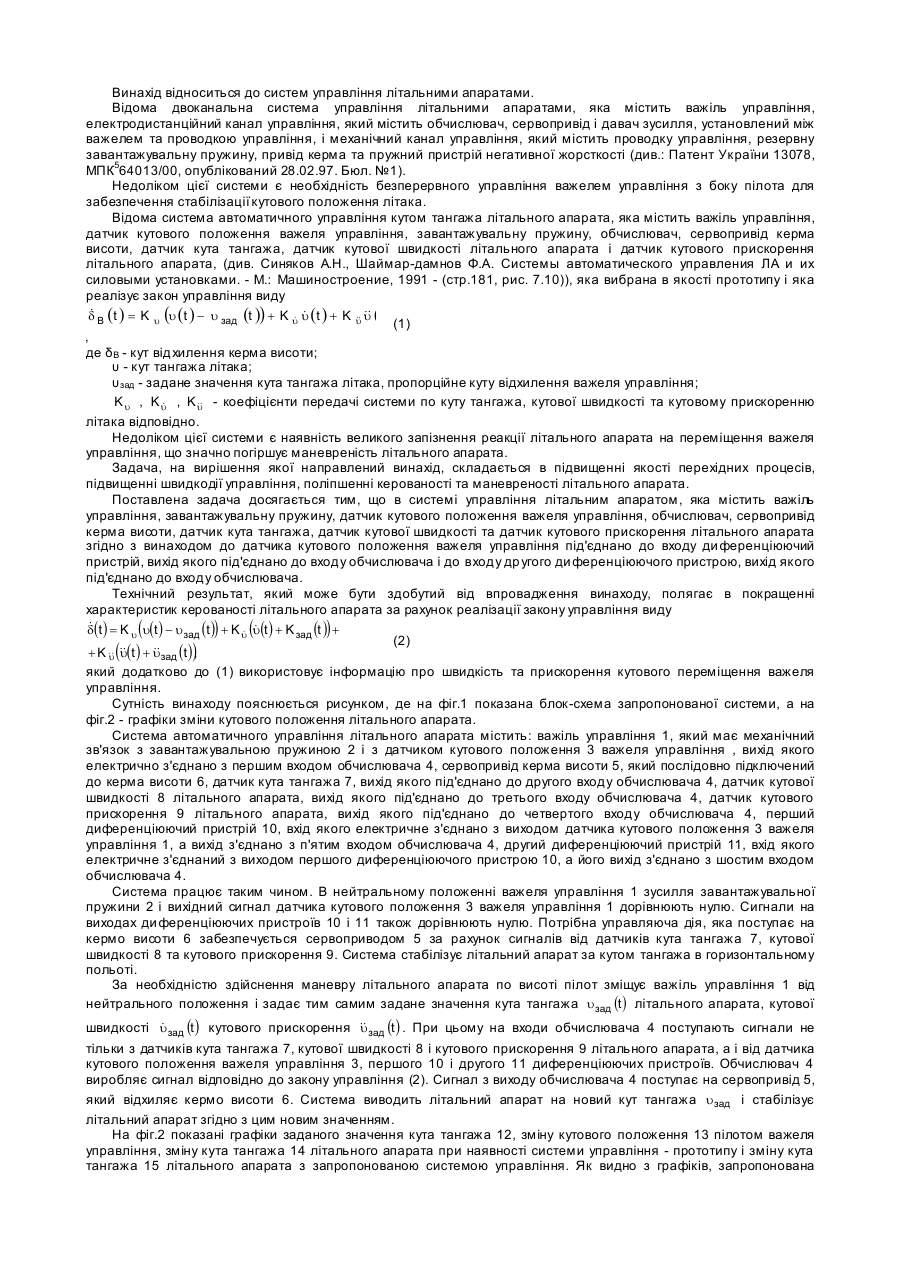
Система керування літальним апаратом, що містить важіль керування, завантажувальну пружину, датчик кутового положення важеля керування, обчислювач, сервопривід керма висоти, кермо висоти, датчик кута тангажа, датчик кутової швидкості та датчик кутового прискорення літального апарата, перший диференціюючий пристрій, другий диференціюючий пристрій, яка відрізняється тим, що до її складу введені перший аналогоцифровий перетворювач, вхід якого з'єднаний з виходом датчика кутового положення важеля ке U 1 3 36519 ління під час польоту та виконання літальним апаратом маневрів. Рішення поставленої задачі досягається тим, що в систему керування літальним апаратом, що містить важіль управління, завантажувальну пружину, датчик кутового положення важеля управління, обчислювач, сервопривід керма висоти, кермо висоти, датчик кута тангажа, датчик кутової швидкості та датчик кутового прискорення літального апарата, перший диференціюючий пристрій, другий диференціюючий пристрій згідно з корисною моделлю введені перший аналого-цифровий перетворювач, вхід якого з'єднаний з виходом датчика кутового положення важеля управління, а вихід - з першим входом мультиплексора та з входом першого диференціюючого пристрою, мультиплексор, другий вхід якого з'єднаний з виходом другого аналого-цифрового перетворювача, третій - з виходом третього аналого-цифрового перетворювача, четвертий - з виходом четвертого аналого-цифрового перетворювача, п'ятий - з виходом першого диференціюючого пристрою, шостий - з виходом другого диференціюючого пристрою, а вихід - з входом обчислювача, перший нормуючий підсилювач, вхід якого з'єднаний з виходом датчика кута тангажа, а вихід - з входом другого аналого-цифрового перетворювача, другий нормуючий підсилювач, вхід якого з'єднаний з виходом датчика кутової швидкості, а ви хід - з входом третього аналого-цифрового перетворювача, третій нормуючий підсилювач, вхід якого з'єднаний з виходом датчика кутового прискорення літального апарата, а вихід - з входом четвертого аналого-цифрового перетворювача. Сутність корисної моделі пояснюється кресленнями, де на Фіг.1 зображена блок-схема запропонованої системи управління літальним апаратом , на Фіг.2 - блок-схема аналізу запропонованої цифрової системи управління, на Фіг.3 - перехідний процес за кутом тангажа системи управління, взятої за прототип (аналогової), на Фіг.4 - перехідний процес за кутом тангажа запропонованої системи управляння. Система управління літальним апаратом містить: важіль управління 1, який має механічний зв'язок з завантажувальною пружиною 2 і з датчиком кутового положення 3 важеля управління, вихід якого електрично з'єднаний з входом першого аналого-цифрового перетворювача 12, вихід якого електрично з'єднаний з першим входом мультиплексора 13, вихід якого з'єднаний з входом обчислювача 4, ви хід якого з'єднаний з входом цифроаналогового перетворювача 14, вихід якого з'єднаний з сервоприводом керма висоти 5, який послідовно з'єднаний з кермом висоти 6, датчик кута тангажа 7, вихід якого з'єднаний з входом другого аналого-цифрового перетворювача 15, вихід якого з'єднаний з входом першого нормуючого підсилювача 18, вихід якого з'єднаний з другим входом мультиплексора 13, датчик кутової швидкості 8 ( ) 4 літального апарата, вихід якого з'єднаний з входом третього аналого-цифрового перетворювача 16, вихід якого з'єднаний з входом другого нормуючого підсилювача 19, вихід якого з'єднаний з третім входом мультиплексора 13, датчик кутового прискорення 9 літального апарата, вихід якого з'єднаний з входом четвертого аналого-цифрового перетворювача 17, вихід якого з'єднаний з входом третього нормуючого підсилювача 20, вихід якого з'єднаний з четвертим входом мультиплексора 13, перший диференціюючий пристрій 10, вхід якого з'єднаний з виходом першого аналого-цифрового перетворювача 12, а вихід - з'єднаний з п'ятим входом мультиплексора 13, другий диференціюючий пристрій 11, вхід якого електрично з'єднаний з виходом першого диференціюючого пристрою 10, а вихід - з шостим входом мультиплексора 13. Система керування літальним апаратом працює таким чином: в нейтральному положенні важеля управління 1 зусилля завантажувальної пружини 2 і вихідний сигнал датчика кутового положення 3 важеля управління дорівнюють нулю. Сигнали на виходах диференціюючих пристроїв 10 і 11 також дорівнюють нулю. Потрібна керуюча дія, яка поступає на кермо висоти 6 забезпечується сервоприводом 5 за рахунок сигналів від датчиків кута тангажа 7, кутової швидкості 8 та кутового прискорення 9. Система стабілізує літальний апарат за кутом тангажа в горизонтальному польоті. За необхідністю здійснення маневрів літального апарату по висоті пілот зміщує важіль управління 1 від нейтрального положення і задає тим самим задане значення кута тангажа J ЗАД (t ) & літального апарата, кутової швидкості JЗАД (t ) , && кутового прискорення JЗАД (t ) . При цьому на другий, третій, четвертий входи мультиплексора 13 поступаюсь сигнали з датчиків кута тангажа 7, датчика кутової швидкості 8 і кутового прискорення 9 літального апарата, які пропускаються відповідно через другий, третій на четвертий аналогоцифрові перетворювачі 15, 16 та 17 для отримання замість аналогового сигналу у вигляді цифрового машинного коду. Отримані цифрові сигнали з датчиків кута тангажа 7, датчика кутової швидкості 8 і кутового прискорення 9 літального апарата поступають відповідно на перший, другий, третій нормуючі підсилювачі 18, 19, 20 для підсилення сигналів та попередження перерегулювання. На перший, п'я тий, шостий входи мультіплексора 13 відповідно подаються сигнали від датчика кутового положення 3 важеля управління, який пропускається через перший аналого-цифровий перетворювач 12 для отримання замість аналогового сигналу у вигляді цифрового машинного коду, першого 10 і другого 11 диференціюючих пристроїв. Після мультиплексора 13 отриманий сигнал поступає на обчислювач 4, який виробляє вихідний сигнал відповідно до закону управління: ( ) ( ) & & && && d B (t ) = K J J(t ) - JЗАД (t ) + K J J(t ) - JЗАД (t ) + K && J(t ) - JЗАД (t ) , & J 5 36519 який додатково використовує інформацію про швидкість та прискорення кутового переміщення важеля управління 1. Сигнал з виходу обчислювача 4 поступає на цифро-аналоговий перетворювач 14, де сигнал перетворюється з цифрового на аналоговий, а далі подається на сервопривід 5, який відхиляє кермо висоти 6. Система виводить літальний апарат на новий кут тангажа J ЗАД (t ) і стабілізує літальний апарат згідно з цим новим значенням. Таким чином, введення до складу системи першого, другого, третього, четвертого аналогоцифрових перетворювачів, мультиплексора, циф Комп’ютерна в ерстка А. Рябко 6 ро-аналогового перетворювача, першого, другого, третього нормуючого підсилювача дозволяє забезпечити працездатність та нормальне функціонування системи управління безпілотним літальним апаратом за наявності перешкод, більш високу точність управління та якість перехідних процесів та високу перешкодо-захищеності системи управління під час польоту та виконання літальним апаратом маневрів. Але при цьому наявність аналого-цифрових перетворювачів вносить у систему управління незначну часову затримку, тобто зменшується швидкодія системи. Підписне Тираж 28 прим. Міністерство осв іт и і науки України Держав ний департамент інтелектуальної в ласності, вул. Урицького, 45, м. Київ , МСП, 03680, Україна ДП “Український інститут промислов ої в ласності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюAircraft control system
Автори англійськоюSymonov Volodymyr Fedorovych, Bandura Ivan Mykolaiovych, Poltoratska Marharyta Mykolaivna
Назва патенту російськоюСистема управления летательным аппаратом
Автори російськоюСимонов Владимир Федорович, Бандура Иван Николаевич, Полторацкая Маргарита Николаевна
МПК / Мітки
МПК: B64C 13/00, G05D 1/03
Мітки: керування, система, апаратом, літальним
Код посилання
<a href="https://ua.patents.su/3-36519-sistema-keruvannya-litalnim-aparatom.html" target="_blank" rel="follow" title="База патентів України">Система керування літальним апаратом</a>
Система управління літальним апаратом
Номер патенту: 63736
Опубліковано: 15.01.2004
Автори: Бандура Іван Миколайович, Симонов Володимир Федорович, Субота Анатолій Максимович
МПК: B64C 13/00
Мітки: управління, апаратом, літальним, система
Формула / Реферат:
Система управління літальним апаратом, яка містить важіль управління, завантажувальну пружину, датчик кутового положення важеля управління, обчислювач, сервопривід керма висоти, датчик кута тангажа, датчик кутової швидкості і датчик кутового прискорення літального апарата, яка відрізняється тим, що в ній до датчика кутового положення важеля управління під'єднано перший диференціюючий пристрій, вихід якого під'єднано до входу обчислювача і до...
Відмовостійка система керування літальним апаратом
Номер патенту: 36472
Опубліковано: 27.10.2008
Автор: Кулік Анатолій Степанович
МПК: G05D 1/10
Мітки: система, відмовостійка, літальним, керування, апаратом
Формула / Реферат:
Відмовостійка система керування літальним апаратом, що має аналого-цифровий перетворювач, бортову обчислювальну машину, цифро-аналоговий перетворювач, причому виходи аналого-цифрового перетворювача з'єднані з входами бортової цифрової обчислювальної машини, виходи якої з'єднані з входами цифро-аналогового перетворювача об'єкта керування, яка відрізняється тим, що містить блок відмовостійких сервоприводів, блок відмовостійких давачів, причому...
Система керування космічним літальним апаратом

Номер патенту: 67029
Опубліковано: 15.06.2004
Автори: Погудін Андрій Володимирович, Батаєв Віктор Олександрович, Овсяннікова Ірина Валеріївна, Бандура Іван Миколайович
МПК: B64G 1/24
Мітки: апаратом, керування, літальним, космічним, система
Формула / Реферат:
Система керування космічним літальним апаратом, що містить датчик кута та датчик кутових швидкостей, які з'єднані через перший і другий масштабні блоки з формувачем закону керування, і підсилювач потужності, яка відрізняється тим, що в неї введені послідовно включені інтегратор, порівнюючий пристрій, з'єднаний через підсилювач потужності з ротором електродвигуна, на роторі встановлений тахометр, який з'єднаний з другим входом порівнюючого...
Система керування космічним літальним апаратом
Номер патенту: 18400
Опубліковано: 15.11.2006
Автори: Гордін Олександр Григорович, Малєва Людмила Сергіївна, Бандура Іван Миколайович
МПК: B64G 1/24
Мітки: апаратом, космічним, літальним, керування, система
Формула / Реферат:
Система керування космічним літальним апаратом (КЛА), що містить триступеневий гіроскопічний виконавчий орган, датчики моментів на осях підвісу внутрішньої та зовнішньої рами, датчики кута та кутової швидкості КЛА, виходи яких, через попередні перетворювачі, з'єднані з входами блока керування, перший підсилювач потужності підключений до датчика моменту на осі підвісу зовнішньої рами, яка відрізняється тим, що в неї введені два маховики,...
Система керування космічним літальним апаратом
Номер патенту: 11982
Опубліковано: 16.01.2006
Автори: Гавриленко Олег Іванович, Ворончук Сергій Петрович
МПК: B64G 1/24
Мітки: керування, космічним, апаратом, літальним, система
Формула / Реферат:
Система керування космічним літальним апаратом, що складається з датчика кута, датчика кутових швидкостей, першого та другого масштабного блоків, послідовно з'єднаних підсилювача потужності, електродвигуна, ротора електродвигуна, тахометра, яка відрізняється тим, що додатково введено мікропроцесорний пристрій, перший і другий вхід якого з'єднані з виходами першого і другого масштабних блоків відповідно, вихід мікропроцесорного блока з'єднаний...
Попередній патент: Багатовхідний пристрій керованого вмикання і вимикання навантаження з автоматичним контролем
Наступний патент: Спосіб лікування трофічних виразок нижніх кінцівок
Випадковий патент: Провідник для жил силових кабелів