Спосіб орієнтації штучних супутників землі
Номер патенту: 56077
Опубліковано: 15.04.2003
Автори: Шостачук Дмитро Миколайович, Самотокін Борис Борисович
Формула / Реферат
Спосіб орієнтації штучних супутників Землі, що включає керування супутником шляхом накопичення кінетичного моменту та періодичного його скидання, а також вимірювання поточного значення напруженості геомагнітного поля по осях супутника, який відрізняється тим, що попередньо розраховують аналітичні прогнозні моделі збурюючого моменту та геомагнітного поля в заданих ділянках орбіти, після чого протягом заданого інтервалу часу обертання супутника по орбіті на основі обробки сигналів, пропорційних накопиченим по осях супутника складовим кінетичного моменту, коригують попередньо розраховану аналітичну прогнозну модель збурюючого моменту, потім вимірюють поточні значення напруженості геомагнітного поля по осях супутника протягом заданого інтервалу часу обертання супутника по орбіті і використовують ці значення для поточного коригування попередньо розрахованої аналітичної прогнозної моделі геомагнітного поля, потім по скоригованій аналітичній прогнозній моделі збурюючого моменту обраховують прогнозне значення накопиченого кінетичного моменту для заданого майбутнього інтервалу часу обертання супутника по орбіті і, якщо воно перевищить задану максимально припустиму величину, то, використовуючи скориговану аналітичну прогнозну модель геомагнітного поля, розраховують ту ділянку орбіти супутника, на якій накопичений кінетичний момент можливо скинути з мінімальним енергоспоживанням, а після того, як супутник досягне цієї ділянки орбіти, виконують скидання накопиченого кінетичного моменту.
Текст
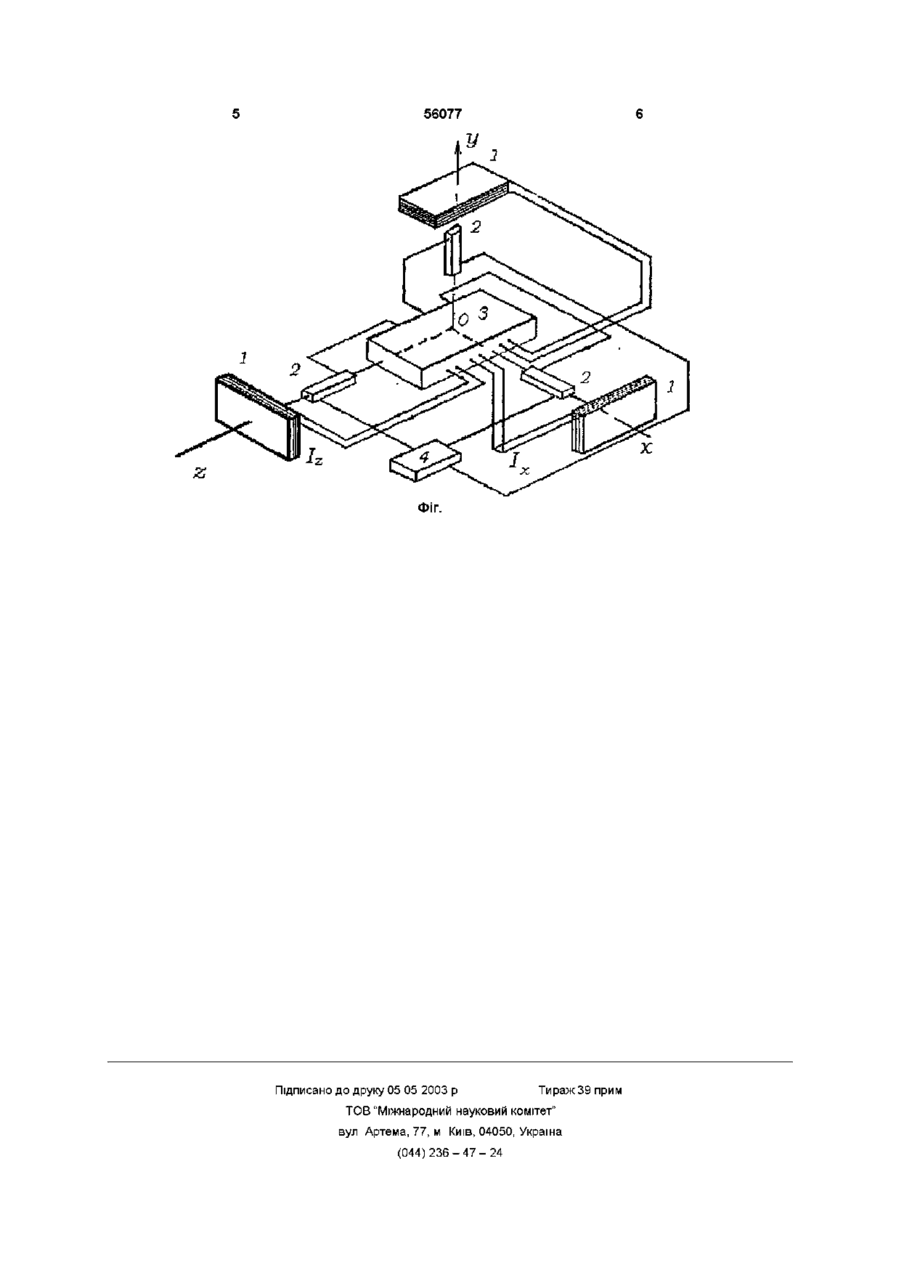
Спосіб орієнтації штучних супутників Землі, що включає керування супутником шляхом накопичення кінетичного моменту та періодичного його скидання, а також вимірювання поточного значення напруженості геомагнітного поля по осях супутника, який відрізняється тим, що попередньо розраховують аналітичні прогнозні моделі збурюючого моменту та геомагнітного поля в заданих ділянках орбіти, після чого протягом заданого інтервалу часу обертання супутника по орбіті на основі обробки сигналів, пропорційних накопиченим по осях супутника складовим кінетичного моменту, коригують попередньо розраховану аналі тичну прогнозну модель збурюючого моменту, потім вимірюють поточні значення напруженості геомагнітного поля по осях супутника протягом заданого інтервалу часу обертання супутника по орбіті і використовують ці значення для поточного коригування попередньо розрахованої аналітичної прогнозної моделі геомагнітного поля, потім по скоригованій аналітичній прогнозній моделі збурюючого моменту обраховують прогнозне значення накопиченого кінетичного моменту для заданого майбутнього інтервалу часу обертання супутника по орбіті і, якщо воно перевищить задану максимально припустиму величину, то, використовуючи скориговану аналітичну прогнозну модель геомагнітного поля, розраховують ту ділянку орбіти супутника, на якій накопичений кінетичний момент можливо скинути з мінімальним енергоспоживанням, а після того, як супутник досягне цієї ділянки орбіти, виконують скидання накопиченого кінетичного моменту Винахід належить до галузі космічної техніки і може бути використаний для керування орієнтацією штучних супутників Землі (ШСЗ), особливо тих, що знаходяться на відстані понад 20тис км від поверхні Землі і живляться від сонячних батарей Відомий спосіб орієнтації штучних супутників Землі [1] Відомий спосіб, як і спосіб-винахід, включає керування супутником шляхом накопичення кінетичного моменту та періодичного його скидання, а також вимірювання поточного значення напруженості геомагнітного поля по осях супутника Але, на відміну від винаходу, що пропонується, у відомому способі застосовують "жорсткий" алгоритм розвантаження накопичувачів кінетичного моменту (НКМ), в якому скидання накопиченого кінетичного моменту здійснюють вже після досягнення НКМ насиченого стану При цьому маса НКМ зазвичай перебільшує необхідну Все це зумовлює такі суттєві недоліки спосо бу-аналогу як перевитрати потужності споживання та недостатня точність орієнтації В основу винаходу поставлена задача вдосконалення способу орієнтації штучних супутників Землі шляхом використання алгоритму розвантаження НКМ із застосуванням прогнозних моделей, що забезпечить зменшення потужності споживання та збільшення точності орієнтації Саме завдяки створенню прогнозних моделей та їх поточному коригуванню, скидання накопиченого кінетичного моменту відбувається лише в тому випадку, коли передбачається, що НКМ дійсно будуть перебувати в стані насичення Причому скидання накопиченого кінетичного моменту здійснюється ще до наближення НКМ до цього стану, тобто коли прогнозне значення накопиченого кінетичного моменту ще не перевищує задану максимально припустиму величину Якщо ж перебування НКМ у стані насичення не прогнозується, скидання накопиченого кінетичного моменту вза О (О ю 56077 них, що надходять з НКМ та магнітометрів 2, і подачі сигналів керування на силові котушки 1 Блок 4 живлення необхідний для функціонування всіх пристроїв та систем Пристрій працює таким чином НКМ надають інформацію про складові збурюючого моменту, що діє на супутник, а магнітометри 2 - про складові геомагнітного поля В обчислювальному пристрої 3 відбувається обробка цих даних та коригуються прогнозні моделі накопичев такій ПОСЛІДОВНОСТІ ного кінетичного моменту та геомагнітного поля 1 Попередньо розраховують аналітичні проЗгідно ЗІ скоригованими прогнозними моделями в гнозні моделі збурюючого моменту та геомагнітнообчислювальному пристрої 3 формується алгого поля в заданих ділянках орбіти ритм розвантаження НКМ на наступний період 2 Протягом заданого інтервалу часу, наприобертання супутника по орбіті за допомогою силоклад, за період обертання супутника по орбіті, на вих котушок 1 основі обробки сигналів, пропорційних накопиченим по осях супутника складовим кінетичного моКеруючий момент М в такому пристрої ствоменту, які залежать від складових збурюючого рюється за рахунок взаємодії магнітного моменту моменту, коригують попередньо розраховану анаР силової котушки 1 з індукцією В геомагнітного літичну прогнозну модель збурюючого моменту поля [2] 3 Вимірюють поточні значення напруженості геомагнітного поля по осях супутника протягом М = РхВ заданого інтервалу часу, наприклад, за період Струм, що проходить через силову котушку 1, обертання супутника по орбіті, і використовують ці електромагнітна вісь якої співпадає з віссю Ох, значення для поточного коригування попередньо позначимо їх, з віссю OY - через Іу, з віссю Oz розрахованої аналітичної прогнозної моделі геочерез Iz Тоді магнітний момент кожної силової магнітного поля котушки 1 буде мати вигляд 4 По скоригованій аналітичній прогнозній моРх = nS їх, делі збурюючого моменту обраховують прогнозне P Y = nS I Y , значення накопиченого кінетичного моменту для Pz = nS Iz, заданого майбутнього інтервалу часу, наприклад, де n та S - ВІДПОВІДНО число витків та площа за період обертання супутника по орбіті витка 5 Якщо обраховане прогнозне значення накоПроектуючи отримані вирази на координатні пиченого кінетичного моменту перевищить задану осі, запишемо ВІДПОВІДНІ вирази для струмів, які максимально припустиму величину, то, використонеобхідно пропустити через силові котушки 1 для вуючи скориговану аналітичну прогнозну модель отримання потрібних значень керуючих моментів геомагнітного поля, розраховують ту ділянку орбіI = A ( B M - B M ) , ти супутника, на якій накопичений кінетичний моnS мент можливо скинути з мінімальним енергоспоживанням, ВZ'V'X - B X'V'Z nS 6 Після ТОГО, ЯК супутник досягне цієї ділянки орбіти, виконують скидання накопиченого кінетичВX'V'Y - B Y'V'X, ного моменту nS На кресленні (фіг) зображений пристрій для Зміна значень коефіцієнту k внаслідок зміни реалізації запропонованого способу індукції геомагнітного поля може бути врахована До складу пристрою входять силові котушки 1, при проектуванні замкнутої системи управління магнітометри 2, обчислювальний пристрій 3, блок кутовими рухами супутника введенням контуру 4 живлення самонастроювання Силові котушки 1 призначаються для створенЛітература ня керуючого моменту при розвантаженні НКМ за 1 Самотокин Б Б , Степанковский Ю В О работе рахунок взаємодії магнітного поля силових котумоментного магнитопривода в режиме непрерывшок 1 з геомагнітним полем Магнітометри 2 є одной разгрузки носителей кинетического момента // носкладовими, магнітні осі кожного з них жорстко Известия ВУЗов СССР Приборостроение, 1974 зв'язані з конструктивними осями супутника Маг№10 -с 75-78 нітометри 2 використовують для вимірювання 2 Алексеев К Б , Бебенин Г Г Управление космискладових геомагнітного поля з подальшим корическим летательным аппаратом - М Машиностгуванням його прогнозної моделі Обчислювальроение -1964 - 404с ний пристрій 3 призначений для обробки всіх дагалі не відбувається Таким чином, маючи інформацію про накопичений кінетичний момент протягом заданого інтервалу часу, наприклад, за період обертання супутника по орбіті, та витрачену потужність, можна точно обрахувати необхідну масу НКМ, потрібні запаси енергії та забезпечити необхідну точність орієнтації супутника Заявлений спосіб орієнтації ШСЗ виконується X Y Z Z Y 56077 X Z Фіг. Підписано до друку 05 05 2003 р Тираж 39 прим ТОВ "Міжнародний науковий комітет" вул Артема, 77, м Київ, 04050, Україна (044)236-47-24
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for orientation of artificial earth satellites
Назва патенту російськоюСпособ ориентации искусственных спутников земли
МПК / Мітки
МПК: B64G 1/32
Мітки: штучних, землі, супутників, спосіб, орієнтації
Код посилання
<a href="https://ua.patents.su/3-56077-sposib-oriehntaci-shtuchnikh-suputnikiv-zemli.html" target="_blank" rel="follow" title="База патентів України">Спосіб орієнтації штучних супутників землі</a>
Спосіб формування навколо землі компланарної групи штучних супутників землі
Номер патенту: 26787
Опубліковано: 12.11.1999
Автори: Малков Андрій Борисович, Конишева Галина Миколаївна, Абросімов Микола Миколайович
МПК: B64G 9/00
Мітки: спосіб, супутників, формування, землі, компланарної, групи, штучних
Формула / Реферат:
1. Спосіб формування навколо Землі компланарної групи штучних супутників Землі, у відповідності з яким визначають параметри орбіт, порядок та засоби виведення на них заданого числа H штучних супутників Землі, виводять їх на розрахункові орбіти, під час виведення цим штучним супутникам Землі задають параметри виведення, які забезпечують компланарне розміщення центрів мас усіх H штучних супутників Землі навколо Землі у межах спільної площини,...
Система визначення орієнтації штучного супутника землі
Номер патенту: 21768
Опубліковано: 30.04.1998
Автори: Салтиков Юрій Дмитрович, П'ятак Ігор Авдійович
МПК: G01S 5/02, G01C 21/24
Мітки: система, землі, визначення, орієнтації, супутника, штучного
Формула / Реферат:
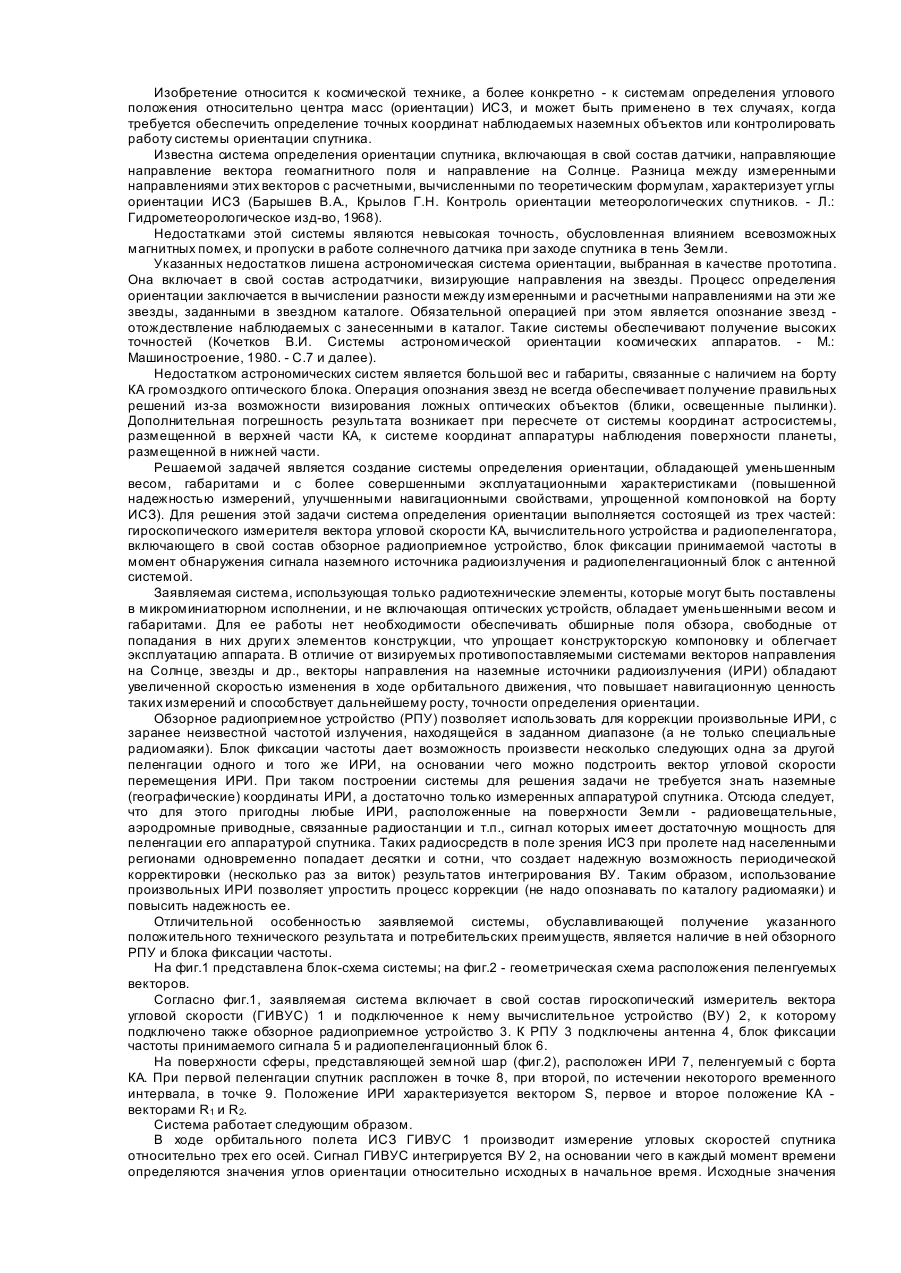
1. Система определения ориентации искусственного спутника Земли, состоящая из гироскопического блока измерителя угловой скорости спутника, вычислительного устройства и радиопеленгатора, включающего радиопеленгационный блок с антенной системой, отличающаяся тем, что в состав радиопеленгатора входят обзорное радиоприемное устройство и блок фиксации частоты принимаемого сигнала.2. Система определения ориентации, выполненная в...
Пристрій для орієнтації штучних вантажів
Номер патенту: 7395
Опубліковано: 29.09.1995
Автори: Сухой Леонід Олександрович, Сніховський Володимир Маркович, Горшунов Вячеслав Петрович, Бурляй Юрій Васильович
МПК: B65G 47/91
Мітки: вантажів, штучних, пристрій, орієнтації
Формула / Реферат:
1. Устройство для ориентации штучных грузов, включающее подающий и принимающий транспортеры с направляющими, и переворачивающий механизм в виде ротора с каналами для грузов на многогранной поверхности, отличающееся тем, что, с целью повышения производительности и исключения повреждения грузов, принимающий и подающий транспортеры выполнены вибрационными и снабжены пневматическим приводом, а ротор снабжен щелевым вакуум-захватом и выполнен...
Спосіб та пристрій повністю апаратної обробки радіосигналів навігаційних супутників gps і глонасс
Номер патенту: 31662
Опубліковано: 15.12.2000
Автори: Кириченко Олександр Іванович, Дубінко Юрій Сергійович, Лук'яненко Микола Васильович, Борсук Олег Анатолійович
Мітки: супутників, пристрій, повністю, глонасс, спосіб, навігаційних, радіосигналів, апаратної, обробки
Текст:
...структурна схема цифрової замкнутої з дискретниі управлінням фазою системи стеження за затримкою коду ( ССЗ ) запропонованог АЦСПРС з апаратною підтримкою відстеженої ССН доплеровською частотою, де 22 блок коригування фази коду , 23 - схема "арбітр ", 24 - перший накопичуючий сумато) 25 - блок управління, 26 - ПЗГЦпостійний запом'ятовуючий пристрій),. 27 - другі' накопичуючий суматор, 28 - перший діль ник, 29 - дискримінатор затримки,...
Модель магнітного поля землі
Номер патенту: 1615
Опубліковано: 15.01.2003
Автори: Биков Валерій Юхимович, Жук Юрій Олексійович, Стороженко Анатолій Олександрович, Сухомлинський Сергій Васильович
МПК: G09B 23/18
Мітки: землі, магнітного, поля, модель
Формула / Реферат:
Модель магнітного поля Землі, яка включає порожнистий географічний глобус поверхні Землі, яка відрізняється тим, що всередині глобуса вздовж осі обертання розташований електромагніт.
Попередній патент: Пристрій з механічним приводом для видалення жирової клітковини та ендоскопічних операцій
Наступний патент: Спосіб виробництва броньової сталі
Випадковий патент: Спосіб підвищення врожайності зерна ячменю ярого сорту командор